Изобретение относится измерительной технике и может быть использовано для автоматического определения исправности тормозной системы транспортного средства.
Известен способ определения исправности тормозной системы транспортных средств, заключающийся в определении величины текущей перегрузки, определении начальных условий возникновения перегрузки на основе сравнения текущей скорости движения транспортного средства с заданными значениями, анализе текущей величины перегрузки на основе сравнения с эталонными значениями при соответствующих начальных условиях возникновения перегрузки, сигнализации об исправности тормозной системы в случае превышения уровня текущей величины перегрузки относительно заданных значений перегрузки (Заявка №2004127650/28 от 15.09.2004 г., решение о выдаче патента на изобретение от 30.03.2006 г.).
Наиболее близким к изобретению является вибрационный датчик, содержащий электроконтактный датчик, вычислитель, блок обработки информации, индикатор направления перегрузки, индикатор величины перегрузки, индикатор превышения уровня перегрузки, при этом электроконтактный датчик состоит из немагнитного конусообразного корпуса с крышкой, размещенной в вершине корпуса, инерционного элемента, выполненного в виде электропроводного шарика, первого электроконтакта, выполненного в виде усеченного полого конуса, закрепленного на крышке корпуса, второго электроконтакта, выполненного в виде полого конуса, размещенного по боковой поверхности корпуса так, что его основание обращено к нижнему основанию усеченного конуса первого электроконтакта и параллельно ему, изолированных между собой центрального и кольцевого электроконтактов, причем центральный электроконтакт размещен в вершине конуса второго электроконтакта и изолирован от него, кольцевой электроконтакт размещен по периметру вершины конуса второго электроконтакта и изолирован от него, первый электроконтакт выполнен в виде изолированных друг от друга секторов, выводы которых образуют первую группу выходов датчика, вторым выходом которого является вывод кольцевого электроконтакта, центральный и второй электроконтакты соединены с положительным выводом источника питания, первая группа входов и второй вход вычислителя соединены соответственно с первой группой выходов и вторым выходом датчика, первая группа выходов вычислителя соединена с группой входов индикатора направления перегрузки, второй выход - с входом индикатора перегрузки, вычислитель содержит группу из n-триггеров, где n-число секторов первого электроконтакта вибрационного датчика, первый, второй и третий элементы И, инвертор, генератор импульсов, дифференцирующую цепь, счетчик импульсов, умножитель, делитель, задатчик постоянной величины, причем информационные входы триггеров соединены с соответствующими входами первой группы входов вычислителя, второй вход которого через инвертор соединен с входом дифференцирующей цепи и первым входом второго элемента И, второй вход которого соединен с выходом генератора импульсов, а выход второго элемента И соединен с информационным входом счетчика, входы обнуления триггеров и счетчика импульсов объединены с обеспечением возможности подачи на них сигнала с плюсовой шины источника питания, прямые выходы триггеров являются соответствующими выходами первой группы выходов вычислителя, а инверсные выходы соединены с соответствующими входами группы n-входов первого элемента И, выход которого соединен с третьим входом второго элемента И и вторым входом третьего элемента И, первый вход которого соединен с выходом дифференцирующей цепи, а выход третьего элемента И соединен с входом обнуления счетчика импульсов, выход которого соединен с первым и вторым входами умножителя, выход которого соединен с первым входом делителя, второй вход которого соединен с выходом первого задатчика постоянной величины, а выход является вторым выходом вычислителя, блок обработки информации состоит из n-первых, n-вторых пороговых устройств, n-ключей, элемента ИЛИ и задатчика постоянных сигналов, причем второй выход вычислителя соединен соответственно с первым входом блока обработки информации, второй вход которого соединен с выходом датчика скорости движения транспортного средства, а выход блока обработки информации соединен с индикатором превышения уровня перегрузки, первый и второй входы блока обработки информации соединены соответственно со вторыми входами n-вторых и первыми входами n-первых пороговых устройств, выходы n-первых пороговых устройств соединены с первыми входами n-ключей, первые и вторые выходы задатчика постоянных сигналов соединены соответственно со вторыми входами n-первых пороговых устройств и вторыми входами n-ключей, выходы которых через первые входы n-вторых пороговых устройств соединены с n-входами элемента ИЛИ, выход которого является выходом блока обработки информации (Заявка №2004127650/28 от 15.09.2004 г., решение о выдаче патента на изобретение от 30.03.2006 г.).
Недостатком данных способа и устройства является осуществление контроля тормозной системы транспортных средств, основанного на анализе текущих значений перегрузок с эталонными, в условиях недостоверного определения начальных условий возникновения перегрузок, скорости движения транспортного средства, без учета степени воздействия усилий на тормозные колодки колес.
Технической задачей изобретения является повышения достоверности контроля тормозной системы транспортных средств за счет определения начальных условий возникновения перегрузки на основе двух исходных данных скорости движения транспортного средства и усилий, воздействующих на тормозные колодки колес.
Решение технической задачи достигается тем, что в способе определения исправности тормозной системы транспортных средств, заключающемся в определении величины текущей перегрузки, определении начальных условий перегрузки на основе сравнения текущей скорости движения транспортного средства с заданными значениями, анализе текущей величины перегрузки на основе сравнения с эталонными значениями при соответствующих начальных условиях возникновения перегрузки, сигнализации об исправности тормозной системы в случае превышения уровня текущей величины перегрузки относительно заданных значений перегрузки, дополнительно осуществляют определения начальных условий возникновения перегрузки на основе двух исходных данных, а именно скорости движения транспортного средства в момент торможения и воздействующих усилий на тормозные колодки, и определяют исправность тормозной системы в соответствии с этими начальными условиями.
Решение технической задачи по реализации заявляемого способа достигается тем, что в устройство определения исправности тормозной системы транспортных средств, содержащее электроконтактный датчик, вычислитель, блок обработки информации, индикатор направления перегрузки, индикатор величины перегрузки, индикатор превышения уровня перегрузки, при этом электроконтактный датчик состоит из немагнитного конусообразного корпуса с крышкой, размещенной в вершине корпуса, инерционного элемента, выполненного в виде электропроводного шарика, первого электроконтакта, выполненного в виде усеченного полого конуса, закрепленного на крышке корпуса, второго электроконтакта, выполненного в виде полого конуса, размещенного по боковой поверхности корпуса так, что его основание обращено к нижнему основанию усеченного конуса первого электроконтакта и параллельно ему, изолированных между собой центрального и кольцевого электроконтактов, причем центральный электроконтакт размещен в вершине конуса второго электроконтакта и изолирован от него, кольцевой электроконтакт размещен по периметру вершины конуса второго электроконтакта и изолирован от него, первый электроконтакт выполнен в виде изолированных друг от друга секторов, выводы которых образуют первую группу выходов датчика, вторым выходом которого является вывод кольцевого электроконтакта, центральный и второй электроконтакты соединены с положительным выводом источника питания, первая группа входов и второй вход вычислителя соединены соответственно с первой группой выходов и вторым выходом датчика, первая группа выходов вычислителя соединена с группой входов индикатора направления перегрузки, второй выход - с входом индикатора перегрузки, вычислитель содержит группу из n-тригтеров, где n-число секторов первого электроконтакта вибрационного датчика, первый, второй и третий элементы И, инвертор, генератор импульсов, дифференцирующую цепь, счетчик импульсов, умножитель, делитель, задатчик постоянной величины, причем информационные входы триггеров соединены с соответствующими входами первой группы входов вычислителя, второй вход которого через инвертор соединен с входом дифференцирующей цепи и первым входом второго элемента И, второй вход которого соединен с выходом генератора импульсов, а выход второго элемента И соединен с информационным входом счетчика, входы обнуления триггеров и счетчика импульсов объединены с обеспечением возможности подачи на них сигнала с плюсовой шиной источника питания, прямые выходы триггеров являются соответствующими выходами первой группы выходов вычислителя, а инверсные выходы соединены с соответствующими входами группы n-входов первого элемента И, выход которого соединен с третьим входом второго элемента И и вторым входом третьего элемента И, первый вход которого соединен с выходом дифференцирующей цепи, а выход третьего элемента И соединен с входом обнуления счетчика импульсов, выход которого соединен с первым и вторым входами умножителя, выход которого соединен с первым входом делителя, второй вход которого соединен с выходом первого задатчика постоянной величины, а выход является вторым выходом вычислителя, блок обработки информации состоит из n-первых, n-вторых пороговых устройств, n-ключей, элемента ИЛИ и задатчика постоянных сигналов, причем второй выход вычислителя соединен соответственно с первым входом блока обработки информации, второй вход которого соединен с выходом датчика скорости движения транспортного средства, а выход блока обработки информации соединен с индикатором превышения уровня перегрузки, первый и второй входы блока обработки информации соединены соответственно со вторыми входами n-вторых и первыми входами n-первых пороговых устройств, выходы n-первых пороговых устройств соединены с первыми входами n-ключей, первые и вторые выходы задатчика постоянных сигналов соединены соответственно со вторыми входами n-первых пороговых устройств и вторыми входами n-ключей, выходы которых через первые входы n-вторых пороговых устройств соединены с n-входами элемента ИЛИ, выход которого является выходом блока обработки информации, дополнительно введен блок логики, состоящий из матрицы элементов И, из матрицы триггеров, первого и второго элемента ИЛИ, дифференцирующей цепи, причем первые входы матрицы элементов И соединены с первыми входами блока логики, а вторые входы соединены со вторыми входами блока логики, а выходы элементов И соединены со входами триггеров, выходы которых соединены со входом второго элемента ИЛИ, выход которого является выходом блока логики, первый и второй входы которого соединены соответственно с выходами датчика скорости движения транспортного средства и выходами датчика определения усилий нажатий на педаль тормоза, выходы которого также соединены с входом первого элемента ИЛИ, выход которого через дифференцирующую цепь соединен со вторыми входами матрицы триггеров.
Новыми признаками, обладающими существенными отличиями по способу, является следующая совокупность действий.
1. Определение начальных условий возникновения перегрузки на основе двух исходных данных, а именно скорости движения транспортного средства в момент торможения и воздействующих усилий на тормозные колодки колес.
2. Определение исправности тормозной системы в соответствии с начальными условиями возникновения перегрузки, основанное на взаимном учете скорости движения транспортного средства и воздействующих усилий на тормозные колодки колес.
Новыми признаками, обладающими существенными отличиями по устройству, является блок логики и связи между известными и новыми элементами.
На фиг.1 изображена конструктивная схема электроконтактного датчика; на фиг.2 - то же, план; на фиг 3 - структурная схема электрической части устройства; на фиг.4 - блок обработки информации; на фиг.5 - блок логики.
Устройство определения исправности тормозной системы содержит электроконтактный датчик 1, вычислитель 2, блок 3 обработки информации, индикатор 4 направления перегрузки, индикатор 5 величины перегрузки, индикатор 6 превышения уровня перегрузки, блок 7 логики.
Электроконтактный датчик 1 состоит из немагнитного конусообразного корпуса 8 с крышкой 9, размещенной в вершине корпуса, инерционного элемента 10, выполненного в виде электропроводного шарика, первого 11 электроконтакта, выполненного в виде усеченного полого конуса, закрепленного на крышке корпуса, второго 12 электроконтакта, выполненного в виде полого конуса, размещенного по боковой поверхности корпуса так, что его основание обращено к нижнему основанию усеченного конуса первого 11 электроконтакта и параллельно ему, изолированных между собой центрального 13 и кольцевого 14 электроконтактов, центральный 13 электроконтакт размещен в вершине конуса второго 12 электроконтакта и изолирован от него, кольцевой 14 электроконтакт размещен по периметру вершины конуса второго 12 электроконтакта и изолирован от него, первый 11 электроконтакт выполнен в виде изолированных друг от друга секторов, выводы которых образуют первую группу выходов датчика 1, вторым выходом которого является вывод кольцевого 14 электроконтакта, центральный 13 и второй 12 электроконтакты соединены с положительным выводом источника 15 питания. Первая группа входов и второй вход вычислителя 2 соединены соответственно с первой группой выходов и вторым выходом датчика 1, первая группа выходов вычислителя 2 соединена с группой входов индикатора 4 направления перегрузки, второй выход - с входом индикатора 5 перегрузки. Вычислитель 2 содержит группу из n-триггеров 16, где n-число секторов первого электроконтакта вибрационного датчика, первый 17, второй 18 и третий 19 элементы И, инвертор 20, генератор 21 импульсов, дифференцирующую цепь 22, счетчик 23 импульсов, умножитель 24, делитель 25, задатчик 26 постоянной величины. Информационные входы триггеров 16 соединены с соответствующими входами первой группы входов вычислителя 2, второй вход которого через инвертор 20 соединен с входом дифференцирующей цепи 22 и первым входом второго 18 элемента И, второй вход которого соединен с выходом генератора 21 импульсов, а выход второго 18 элемента И соединен с информационным входом счетчика 23, входы обнуления триггеров 16 и счетчика 23 импульсов объединены с обеспечением возможности подачи на них сигнала с плюсовой шиной источника 15 питания, прямые выходы триггеров 16 являются соответствующими выходами первой группы выходов вычислителя 2, а инверсные выходы соединены с соответствующими входами группы n-входов первого 17 элемента И, выход которого соединен с третьим входом второго 18 элемента И и вторым входом третьего 19 элемента И, первый вход которого соединен с выходом дифференцирующей цепи 22, а выход третьего 19 элемента И соединен с входом обнуления счетчика 23 импульсов, выход которого соединен с первым и вторым входами умножителя 24, выход которого соединен с первым входом делителя 25, второй вход которого соединен с выходом задатчика 26 постоянной величины, а выход является вторым выходом вычислителя 2. Блок 3 обработки информации состоит из n-первых 27, n-вторых 28 пороговых устройств, n-ключей 29, элемента ИЛИ 30 и задатчика 31 постоянных сигналов, причем второй выход вычислителя 2 соединен соответственно с первым входом блока 3 обработки информации, второй вход которого соединен с выходом блока логики, а выход блока 3 обработки информации соединен с индикатором 6 превышения уровня перегрузки, первый и второй входы блока 3 обработки информации соединены соответственно со вторыми входами n-вторых 28 и первыми входами n-первых 28 пороговых устройств, выходы n-первых 27 пороговых устройств соединены с первыми входами n-ключей 29, первые и вторые выходы задатчика 31 постоянных сигналов соединены соответственно со вторыми входами n-первых 27 пороговых устройств и вторыми входами n-ключей 29, выходы которых через первые входы n-вторых 28 пороговых устройств соединены с n-входами элемента ИЛИ 30, выход которого является выходом блока 3 обработки информации, блок 7 логики состоит из матрицы элементов И 32, из матрицы триггеров 33, первого 34 и второго 35 элемента ИЛИ, дифференцирующей цепи 36, причем первые и вторые входы матрицы элементов И 32 соединены соответственно с первыми и вторыми входами блока 7 логики, а выходы матрицы элементов И 32 соединены с первыми входами матрицы 33 триггеров, выходы которых соединены со входом второго 35 элемента ИЛИ, выход которого является выходом блока 7 логики, первый и второй вход которого соединен соответственно с выходами датчика скорости движения транспортного средства и выходами датчика определения усилий нажатий на педаль тормоза, выходы которого также соединены с входом первого 34 элемента ИЛИ, выход которого через дифференцирующую цепь 35 соединен со вторыми входами матрицы триггеров 33.
Вторые входы матрицы триггеров 33 являются входами «обнуления».
Количество секторов первого электроконтакта 12 выбирается в зависимости от необходимой точности определения направления перегрузки. Чем больше количество секторов, тем выше точность. Минимальная величина сектора определяется возможностями технологии изготовления с учетом обеспечения надежного контакта шарика.
Устройство определения исправности тормозной системы транспортного средства работает следующим образом.
В исходном состоянии сигнал с положительной шины питания подается на входы обнуления счетчика 23 и группы из n-триггеров 16, при этом с инверсных выходов триггера 16 сигналы через первый 17 элемент И поступают на третий вход второго 18 элемента И.
Под воздействием перегрузки инерционный элемент 10 в виде электропроводного шарика перемещается в направлении одного из секторов первого 11 электроконтакта, при этом происходит размыкание центрального 13 и кольцевого электроконтактов 14 (фиг.1, фиг.2), приводящие к снятию сигнала с входа инвертора 20.
Сигнал с выхода инвертора 20 поступает на вход дифференцирующей цепи 22 и на первый вход второго 18 элемента И (фиг.3).
С выхода дифференцирующей цепи 22 сигнал через первый вход третьего 19 элемента И поступает на вход обнуления счетчика 23 импульсов.
С выхода генератора 21 сигнал в виде импульсов поступает через второй вход второго 18 элемента И на первый вход счетчика 23.
В дальнейшем при движении электропроводного шарика 10 происходит замыкание второго 12 и одного из секторов первого 11 электроконтактов (фиг.2), при этом сигнал поступает на первый вход одного из n-триггеров 16, с прямого выхода которого сигнал поступает на вход индикатора 4 направлений перегрузки, а отсутствие сигнала с инверсного выхода триггера 16 приводит к прекращению подсчета импульсов счетчиком 23 через первый 17 и второй 18 элементы И.
С выхода счетчика 23 импульсов сигнал, пропорциональный времени движения t электропроводного шарика, поступает на первый и второй входы умножителя 24, с выхода которого сигнал, пропорциональный величине t2, поступает на первый вход делителя 25, на второй вход которого с выхода задатчика 26 поступает сигнал, пропорциональный величине  (фиг.2), где L - расстояние между двумя исходными положениями электроконтактов, α - угол образующей полого конуса, g - ускорения свободного падения.
(фиг.2), где L - расстояние между двумя исходными положениями электроконтактов, α - угол образующей полого конуса, g - ускорения свободного падения.
С выхода делителя 25, сигнал пропорциональный величине  поступает одновременно на вход индикатора 6 величины перегрузки и на первый вход блока 3 обработки информации.
поступает одновременно на вход индикатора 6 величины перегрузки и на первый вход блока 3 обработки информации.
Блок 3 обработки информации предназначен для определения исправности тормозной системы транспортного средства путем сравнения текущей величины перегрузки с эталонными значениями с учетом начальных условий возникновения перегрузки (фиг.4).
С первой группы выходов 32 задатчика сигналы поступают на вторые входы первого 27 порогового устройства, на первые входы которого поступают сигналы с выхода блока 7 логики. С выходов первых 27 пороговых устройств сигналы, соответствующие скорости движения транспортного средства, поступают на первые входы ключей 29, на вторые входы которых поступают сигналы, пропорциональные эталонным значениям перегрузки, со вторых выходов второго 31 задатчика сигналов.
С выходов n-ключей 29 сигналы поступают на первые входы n-вторых 28 пороговых устройств, на вторые входы которых поступает сигнал, пропорциональный текущей перегрузке nтек.
В случае превышение уровня текущей перегрузки над заданными эталонными значениями сигнал с выходов вторых 28 пороговых устройств через элемент ИЛИ 30 поступает на вход индикатора 6 превышения уровня перегрузки, тем самым обеспечивая автоматическое определение исправности тормозной системы транспортного средства.
Блок 7 логики предназначен для определения начальных условий возникновения перегрузки.
При нажатии водителем на тормозную педаль сигнал, пропорциональный усилию нажатия на педаль и, соответственно, на тормозные колодки колес, поступает с одного из выходов датчика определения усилий нажатий на педаль тормоза на вход первого 34 элемента ИЛИ, выход которого через дифференцирующую цепь 35 соединен со вторыми входами матрицы триггеров 33, тем самым обеспечивая обнуление матрицы триггеров перед началом работы блока 7 логики. После этого (фиг.5) сигналы поступают соответственно с выходов датчика скорости движения транспортного средства и выходов датчика определения усилий нажатий на педаль тормоза, на первые и вторые входы матрицы элементов И 32, с выходов которых сигналы поступают на первые входы матрицы 33 триггеров, с выходов которых поступают на вход второго 35 элемента ИЛИ, выход которого является выходом блока 7 логики.
Таким образом, повышается достоверность определения исправности тормозной системы транспортного средства за счет определения начальных условий возникновения перегрузки с учетом скорости движения транспортного средства и усилий воздействия на тормозные колодки колес.

Изобретение относится к измерительной технике и может быть использовано для проверки исправности тормозной системы транспортных средств. Определяют величину текущей перегрузки. Анализируют текущую величину перегрузки на основе сравнения с эталонными значениями при соответствующих начальных условиях возникновения перегрузки. Определяют начальные условия возникновения перегрузки на основе двух исходных данных: скорости движения транспортного средства в момент торможения и воздействующих усилий на тормозные колодки. Определяют исправность тормозной системы в соответствии с этими начальными условиями. Устройство содержит блок логики, который содержит матрицу элементов И, матрицу триггеров, первый и второй элемент ИЛИ, дифференцирующую цепь. Первые входы матрицы элементов И соединены с первыми входами блока логики, а вторые входы соединены со вторыми входами блока логики. Выходы элементов И соединены с первыми входами триггеров, выходы которых соединены со входом второго элемента ИЛИ, выход которого является выходом блока логики. Первый и второй входы блока логики соединены соответственно с выходом датчика скорости движения транспортного средства и выходом датчика определения усилий нажатия на педаль тормоза, выходы которого также соединены со входом первого элемента ИЛИ, выход которого через дифференцирующую цепь соединен со вторыми входами матрицы триггеров. Технический результат заключается в повышении достоверности определения исправности тормозной системы транспортных средств. 2 н.п. ф-лы, 5 ил.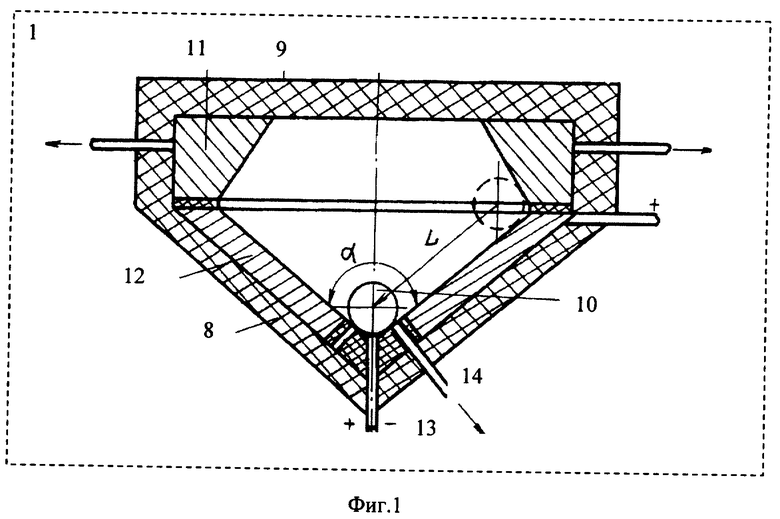
| ВИБРАЦИОННЫЙ ДАТЧИК | 2004 |
|
RU2279645C2 |
| ВИБРАЦИОННЫЙ ДАТЧИК | 1990 |
|
RU2044286C1 |
| Устройство для контроля исправностиТОРМОзА | 1979 |
|
SU840694A1 |
| DE 10044223 A1, 12.04.2001. | |||

