Изобретение относится к автомобильной технике и может быть использовано в автоматических системах определения тормозного пути.
Известен способ определения тормозного пути транспортного средства, заключающийся в том, что информацию о движении транспортного средства получают в виде первой последовательности импульсов, например, с помощью магнитоэлектрического датчика, установленного на валу спидометра транспортного средства, интервалы между упомянутыми импульсами заполняют импульсами второй последовательности с более высокой постоянной частотой, запоминают количество импульсов в предыдущем и последующем интервалах между импульсами первой последовательности, путем сравнения запомненных количеств импульсов определяют знак ускорения, по отрицательному значению ускорения формируют и запоминают сигнал «Начало торможения», с этого момента заполняют первый счетчик-сумматор импульсов первой последовательности, приведенных к линейным размерам пути, при этом в период торможения каждое запомненное количество импульсов в одном из выделенных интервалов между импульсами первой последовательности сравнивают с заранее заданным количеством импульсов, соответствующим минимальной скорости транспортного средства, и при превышении первого значения над вторым формируют сигнал «Торможение юзом», которым запрещают поступление на первый счетчик-сумматор импульсов первой последовательности, а разрешают поступление кодов тормозного пути, которые формируют с выхода инерционного децелерометра, жестко закрепленного на транспортном средстве, с появлением сигнала «Начало торможения» запоминают приведенное к линейным размерам пути количество импульсов первой последовательности вторым счетчиком-сумматором, определяют разность значений между первым и вторым счетчиками-сумматорами, осуществляют выбор заданного режима торможения транспортного средства за счет нажатия на педаль тормоза с заданной длительностью и динамикой изменения усилий, обеспечивающей заданное ускорение движения педали тормоза, осуществляют контроль соответствия выбранного режима торможения путем сравнения текущих значений длительности воздействия на педаль тормоза и ускорений перемещения педали тормоза с заданными значениями, выдают сигнал на индикатор соответствия режима торможения в случае соответствия выбранного режима торможения, осуществляют выдачу сигналов на индикатор полного тормозного пути тормозного пути на участке юза в случае соответствия выбранного режима торможения и полной остановки транспортного средства [1] (Ефанов В.В., Мужичек С.М., Зыков В.Н., Патент РФ на изобретение №2342643, кл. G01M 17/007, В60Т 19/22, G01L 5/28, опубл. 27.12.2008, Бюл. №36).
Известно устройство для определения тормозного пути, содержащее датчик пути, инерционный децелерометр, блок определения тормозного пути, индикатор тормозного пути на участке юза, индикатор общего тормозного пути, причем выход датчика пути и инерционного децелерометра соединен с первым и вторым входами блока определения тормозного пути, который содержит блок преобразования информации о движении в скорость, генератор постоянной частоты импульсов, блок определения, формирования и запоминания сигналов «Начало торможения», «Условное торможение юзом», «Инверсное условное торможение юзом», первый, второй и третий элементы И, делитель, первый и второй счетчики-сумматоры, вычислитель, блок усиления и формирования кодов тормозного пути от децелерометра, при этом первым и вторым входами блока определения тормозного пути являются вход блока преобразования информации о движении в скорость и первый вход блока усиления и формирования кодов тормозного пути от децелерометра, выход блока преобразования информации о движении в скорость соединен с первым входом блока определения, формирования и запоминания сигналов «Начало торможения», «Условное торможение юзом», «Инверсное торможение юзом» и одновременно с первым входом первого элемента И, выход которого через делитель соединен одновременно с первым входом второго элемента И и входом первого счетчика-сумматора, выход которого соединен с первым входом вычитателя, второй вход которого соединен с выходом второго счетчика-сумматора, первый и второй входы которого соединены соответственно с выходами второго и третьего элементов И, вторые входы которых соединены соответственно со вторым и третьим выходами блока определения, формирования и запоминания сигналов «Начало торможения», «Условное торможение юзом», «Инверсное условное торможение юзом», первый выход которого соединен одновременно со вторым входом первого элемента И и третьим входом блока усиления и формирования кодов тормозного пути от децелерометра, второй вход которого соединен с выходом генератора постоянных сигналов, выход которого одновременно соединен со вторым входом блока определения, формирования и запоминания сигналов «Начало торможения», «Условное торможение юзом», «Инверсное условное торможение юзом», третий вход которого является входом сигнала «Уставка Vmin», выход вычитателя и выход второго счетчика-сумматора являются соответственно первым и вторым выходами блока определения тормозного пути, а также четвертый и пятый элементы И, контактный датчик нажатия на педаль, блок оценки режима торможения и индикатор соответствия режима торможения, причем вход блока оценки режимов торможения соединен с выходом контактного датчика, а выход соединен одновременно с входом индикатора соответствия режима торможения и вторыми входами четвертого и пятого элементов И, первые входы которых соединены соответственно с первым и вторым выходом блока определения тормозного пути, а выходы соединены соответственно со входами индикатора тормозного пути на участке юза и индикатора общего тормозного пути, блок оценки режимов торможения состоит из генератора импульсов, элемента И, счетчика, порогового устройства и задатчика сигналов, причем входом блока оценки режимов торможения является первый вход элемента И, второй вход которого соединен с выходом генератора импульсов, а выход через счетчик соединен с первым входом порогового устройства, второй вход которого соединен с выходом задатчика сигналов, выход порогового устройства является выходом блока оценки режимов торможения [1] (Ефанов В.В., Мужичек С.М., Зыков В.Н., Патент РФ на изобретение №2342643, кл. G01M 17/007, В60Т 19/22, G01L 5/28, опубл. 27.12.2008, Бюл. №36).
Недостатком данных способа и устройства является сложность технической реализации и то, что тормозной путь определяется только после торможения. Это не позволяет водителю выбирать режим торможения в процессе торможения.
Наиболее близким к изобретению является способ определения тормозного пути транспортного средства, заключающийся в том, что измеряют скорость транспортного средства, определяют знак ускорения, по отрицательному значению ускорения формируют и запоминают сигнал «Начало торможения», осуществляют выбор заданного режима торможения транспортного средства за счет нажатия на педаль тормоза, осуществляют выдачу сигналов на индикатор полного тормозного пути, определяют скорость движения транспортного средства V1 в момент t1, соответствующий сигналу «Начало торможения», определяют скорость движения транспортного средства V2 в момент t2=t1+Δt и длину тормозного пути S1 из выражения  определяют скорость движения транспортного средства Vi в момент ti=t1+Δt(i-1) и длину тормозного пути Si из выражения
определяют скорость движения транспортного средства Vi в момент ti=t1+Δt(i-1) и длину тормозного пути Si из выражения  по длине тормозного пути выбирают режим торможения [2] (Винокуров В.И., Винокуров Д.В., Зыков В.Н., Зыков А.В. Патент РФ на изобретение №2404897, кл. G01M1 17/00, В60Т1 17/22, опубл. 27.11.2010).
по длине тормозного пути выбирают режим торможения [2] (Винокуров В.И., Винокуров Д.В., Зыков В.Н., Зыков А.В. Патент РФ на изобретение №2404897, кл. G01M1 17/00, В60Т1 17/22, опубл. 27.11.2010).
Наиболее близким к изобретению является устройство определения тормозного пути транспортного средства, содержащее индикатор общего тормозного пути, последовательно соединенные датчик скорости и вычислитель, причем выход вычислителя соединен с входом индикатора общего тормозного пути, а второй вход вычислителя соединен с выходом задатчика постоянной величины [2] (Винокуров В.И., Винокуров Д.В., Зыков В.Н., Зыков А.В. Патент РФ на изобретение №2404897, кл. G01M1 17/00, В60Т1 17/22, опубл. 27.11.2010).
Недостатком данных способа и устройства является низкая информативность, обусловленная отсутствием выбора режима торможения исходя из создавшейся обстановки.
Технической задачей изобретения является повышение информативности за счет автоматического выбора режима торможения транспортного средства исходя из создавшейся обстановки.
Технический результат изобретения достигается тем, что в способе определения тормозного пути транспортного средства, заключающемся в том, что измеряют скорость транспортного средства, определяют знак ускорения, по отрицательному значению ускорения формируют и запоминают сигнал «Начало торможения», осуществляют выбор заданного режима торможения транспортного средства за счет нажатия на педаль тормоза, осуществляют выдачу сигналов на индикатор полного тормозного пути, определяют скорость движения транспортного средства V1 в момент t1, соответствующий сигналу «Начало торможения», определяют скорость движения транспортного средства V2 в момент t2=t1+Δt и длину тормозного пути S1 из выражения  определяют скорость движения транспортного средства Vi в момент ti=t1+Δt(i-1) и длину тормозного пути Si из выражения
определяют скорость движения транспортного средства Vi в момент ti=t1+Δt(i-1) и длину тормозного пути Si из выражения  дополнительно сравнивают текущее и постоянное значение длин тормозных путей в виде выражения: ΔS=Si-Sn, где Si - текущая длина тормозного пути, Sп. - постоянное значение длины тормозного пути, осуществляют анализ величины сигнала ΔS относительно заданных значений опорных сигналов, формируют сигнал, соответствующий режиму торможения исходя из величины разницы сигналов между текущим и постоянным значением длин тормозных путей.
дополнительно сравнивают текущее и постоянное значение длин тормозных путей в виде выражения: ΔS=Si-Sn, где Si - текущая длина тормозного пути, Sп. - постоянное значение длины тормозного пути, осуществляют анализ величины сигнала ΔS относительно заданных значений опорных сигналов, формируют сигнал, соответствующий режиму торможения исходя из величины разницы сигналов между текущим и постоянным значением длин тормозных путей.
В устройстве определения тормозного пути транспортного средства, содержащем индикатор общего тормозного пути, последовательно соединенные датчик скорости и вычислитель, причем выход вычислителя соединен с входом индикатора общего тормозного пути, а второй вход вычислителя соединен с выходом задатчика постоянной величины, дополнительно введены блок выбора режима торможения и индикатор торможения, при этом первый и второй входы блока выбора режима торможения соединены соответственно с выходами задатчика постоянной величины и вычислителя, а выход соединен со входом индикатора торможения.
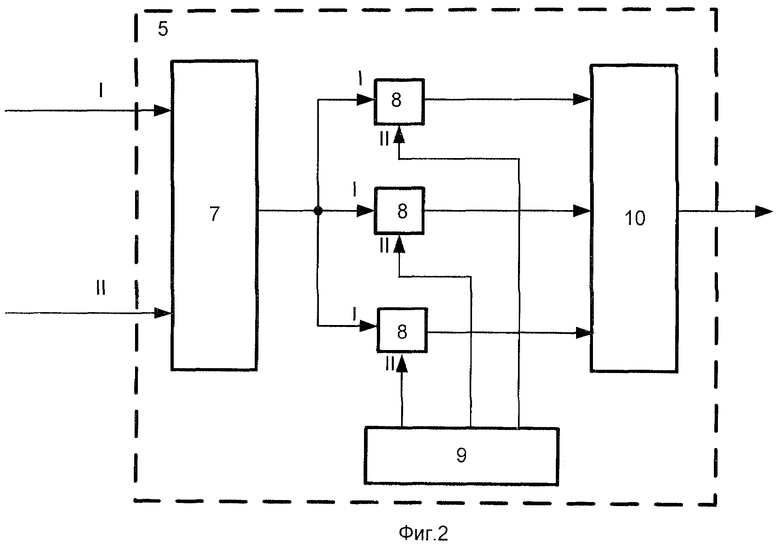
Кроме того, блок выбора режима торможения состоит из вычитающего устройства, n-пороговых устройств, задатчика постоянных сигналов, элемента ИЛИ, причем первым и вторыми входами блока выбора режима торможения, являются первый и второй входы вычитающего устройства, выход которого соединен с первыми входами n-пороговых устройств, вторые входы которых соединены с выходами задатчика постоянных сигналов, выходы n-пороговых устройств соединены с входами элемента ИЛИ, выход которого является выходом блока выбора режима торможения.
Новыми признаками по способу являются следующие признаки:
1. Сравнивают текущее и постоянное значение длин тормозных путей в виде выражения: ΔS=Si-Sn, где Si - текущая длина тормозного пути, Sп. - постоянное значение длины тормозного пути.
2. Осуществляют анализ величины сигнала ΔS относительно заданных значений опорных сигналов.
3. Формируют сигнал, соответствующий режиму торможения исходя из величины разницы сигналов между текущим и постоянным значением длин тормозных путей.
Новыми элементами по устройству являются блок выбора режима торможения и индикатор торможения и связи между новыми и старыми элементами.
На фиг.1 приведена структурная схема устройства определения тормозного пути транспортного средства, где 1 - датчик скорости; 2 - вычислитель; 3 - индикатор общего тормозного пути; 4 - задатчик постоянной величины, блок 5 выбора режима торможения, индикатор 6 режима торможения, на фиг.2 - структурная схема блок выбора режима торможения.
Устройство определения тормозного пути транспортного средства содержит последовательно соединенные датчик скорости 1, вычислитель 2 и индикатор общего тормозного пути 3, причем второй вход вычислителя 2 соединен с выходом задатчика 4 постоянной величины, блок 5 выбора режима торможения и индикатор 6 режима торможения, при этом первый вход блока 5 выбора режима торможения соединен с выходом задатчика 4 постоянной величины, а второй вход соединен с выходом вычислителя 2, выход блока 5 выбора режима торможения соединен с входом индикатора режима торможения 6.
Блок выбора режима торможения состоит из вычитающего устройства 7, n-пороговых устройств 8, задатчика 9 постоянных сигналов, элемента ИЛИ 10.
Устройство определения тормозного пути транспортного средства функционирует следующим образом. Сигнал с датчика скорости 1 поступает в вычислитель 2, где осуществляется определение знака ускорения. По отрицательному значению ускорения формируют и запоминают сигнал «Начало торможения». В вычислителе 2 осуществляется периодическое, через время Δt вычисление длины тормозного пути Si из выражения:  которое индицируется индикатором 3 общего тормозного пути. Индикатор 3 общего тормозного пути также индицирует заданное задатчиком 4 постоянной величины значение тормозного пути.
которое индицируется индикатором 3 общего тормозного пути. Индикатор 3 общего тормозного пути также индицирует заданное задатчиком 4 постоянной величины значение тормозного пути.
Блок 5 выбора режима торможения анализирует выражение: ΔS=Si-Sn, где Si - текущая длина тормозного пути, Sп. - постоянное значение тормозного пути. Вычитающее устройство 7, входящее в блок 5 выбора режима торможения, на основе вычитания сигналов, поступающих на первый Sп и второй Si входы, формирует сигнал ΔS, который поступает на первые входы n-пороговых устройств 8, на вторые входы которых поступают сигналы с выходов задатчика 9 постоянных сигналов.
С выходов одного из пороговых устройств 8 сигнал, соответствующий определенному режиму торможения, поступает через индикатор 6 режима торможения.
Таким образом, автоматически осуществляется выбор режима торможения в зависимости от текущего значения тормозного пути.
Источники информации
1. Ефанов В.В., Мужичек С.М., Зыков В.Н., Патент РФ на изобретение №2342643, кл. G01M 17/007, В60Т 19/22, G01L 5/28, опубл. 27.12.2008, Бюл. №36.
2. Винокуров В.И., Винокуров Д.В., Зыков В.Н., Зыков А.В., Патент РФ на изобретение №2404897, кл. G01M1 17/00, В60Т1 17/22, опубл. 27.11.2010.
Изобретение относится к устройствам тормозных систем. Способ определения тормозного пути осуществляют с помощью устройства определения тормозного пути. При определении тормозного пути измеряют скорость транспортного средства, определяют знак ускорения, по отрицательному значению ускорения формируют и запоминают сигнал «Начало торможения», осуществляют выбор заданного режима торможения транспортного средства за счет нажатия на педаль тормоза, осуществляют выдачу сигналов на индикатор полного тормозного пути. Определяют текущее значение длины тормозного пути. Сравнивают текущее и постоянное значение длин тормозных путей. Формируют сигнал, соответствующий режиму торможения исходя из величины разницы сигналов значений длин тормозных путей. Достигается определение тормозного пути, выбор режима торможения в автоматическом режиме. 2 н.п. ф-лы, 2 ил.
1. Способ определения тормозного пути транспортного средства, заключающийся в том, что измеряют скорость транспортного средства, определяют знак ускорения, по отрицательному значению ускорения формируют и запоминают сигнал «Начало торможения», осуществляют выбор заданного режима торможения транспортного средства за счет нажатия на педаль тормоза, осуществляют выдачу сигналов на индикатор полного тормозного пути, определяют скорость движения транспортного средства V1 в момент t1, соответствующий сигналу «Начало торможения», определяют скорость движения транспортного средства V2 в момент t2=t1+Δt и длину тормозного пути S1 из выражения  , определяют скорость движения транспортного средства Vi в момент ti=t1+Δt(i-1) и длину тормозного пути Si из выражения
, определяют скорость движения транспортного средства Vi в момент ti=t1+Δt(i-1) и длину тормозного пути Si из выражения  отличающийся тем, что дополнительно сравнивают текущее и постоянное значение длин тормозных путей в виде выражения: ΔS=Si-Sn, где Si - текущая длина тормозного пути, Sn - постоянное значение длины тормозного пути, осуществляют анализ величины сигнала ΔS относительно заданных значений опорных сигналов, формируют сигнал, соответствующий режиму торможения исходя из величины разницы сигналов между текущим и постоянным значением длин тормозных путей.
отличающийся тем, что дополнительно сравнивают текущее и постоянное значение длин тормозных путей в виде выражения: ΔS=Si-Sn, где Si - текущая длина тормозного пути, Sn - постоянное значение длины тормозного пути, осуществляют анализ величины сигнала ΔS относительно заданных значений опорных сигналов, формируют сигнал, соответствующий режиму торможения исходя из величины разницы сигналов между текущим и постоянным значением длин тормозных путей.
2. Устройство определения тормозного пути транспортного средства содержит индикатор общего тормозного пути, последовательно соединенные датчик скорости и вычислитель, причем выход вычислителя соединен с входом индикатора полного тормозного пути, а второй вход вычислителя соединен с выходом задатчика постоянной величины тормозного пути, отличающееся тем, что дополнительно введены блок выбора режима торможения и индикатор торможения, при этом первый и второй входы блока выбора режима торможения соединены соответственно с выходами задатчика постоянной величины и вычислителя, блок выбора режима торможения состоит из вычитающего устройства, n-пороговых устройств, задатчика постоянных сигналов, элемента ИЛИ, причем первым и вторыми входами блока выбора режима торможения явлются первый и второй входы вычитающего устройства, выход которого соединен с первыми входами n-пороговых устройств, вторые входы которых соединены с выходами задатчика постоянных сигналов, выходы n-пороговых устройств соединены с входами элемента ИЛИ, выход которого является выходом блока выбора режима торможения.
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2404897C1 |
| Устройство для автоматического торможения транспортного средства перед препятствием | 1978 |
|
SU779118A1 |
| US 2004140143 A1, 22.07.2004 | |||
| CN 101983881 A1, 09.03.2011 | |||
| JP 2009154770 A, 16.07.2009 | |||
| CN 201410950 Y, 24.02.2010. | |||

