Предлагаемое изобретение относится к радиолокационной технике и предназначено для адаптивного управления поляризационными, амплитудными и фазовыми характеристиками рассеяния объектов оборонной техники с ограниченной степенью изменчивости характеристик рассеяния. Оно может быть установлено на транспортных средствах (самолетах, кораблях или космических объектах) с целью радиопротиводействия низкочастотным, антистелсовским радиолокационным системам (РЛС) противника.
Известно устройство «Настраиваемый поглотитель» (патент США US 3309704, 1967 год), применяемое для радиолокационной маскировки объектов и включающее управляемое покрытие, представляющее собой четвертьволновой поглотитель, настраиваемый на частоту облучения с помощью изменения во времени электрической толщины покрытия, а также средства определения частоты облучения, компьютер, узел хранения данных, содержащий параметры воздействия, управляющего покрытием, и цепь обратной связи.
Признаками аналога, совпадающими с существенными признаками заявляемого устройства, являются средства определения частоты облучения (в заявляемом устройстве - блок определения условий облучения), управляемое покрытие и узел хранения данных.
Причиной, препятствующей получению технического результата, является использование настраиваемого четвертьволнового поглотителя, не позволяющего осуществлять управление поляризационными характеристиками электромагнитного (ЭМ) поля, рассеянного маскируемым объектом.
Известно также устройство «Адаптивный радиолокационный поглотитель» (описанное автором Chambers В.А. в статье «Smart radar absorber» в журнале «Smart materials», 1999 год, №8, стр.1-8), применяемое для адаптивной радиолокационной маскировки объектов при помощи управляемого покрытия, состоящего из двух диэлектрических управляемых слоев, четвертьволнового поглотителя и полуволнового фильтра, нанесенных на диэлектрическую подложку. На внутренней стороне покрытия расположен датчик частоты и интенсивности поля. Сигнал с датчика используется для управления параметрами слоев покрытия с помощью двухконтурной обратной связи. Параметры слоев покрытия настраиваются во времени так, чтобы обеспечивались максимальная интенсивность прошедшего сквозь покрытие поля и минимальная интенсивность отраженного от покрытия поля. Покрытие настраивается изменением эквивалентных емкостей двух диэлектрических управляемых слоев.
Признаком аналога, совпадающим с существенным признаком заявляемого устройства, является управляемое покрытие.
Причинами, препятствующими получению технического результата, являются: невозможность управления поляризационными характеристиками отраженного поля; технические трудности реализации покрытия, в частности его двух диэлектрических управляемых слоев с изменяемыми во времени эквивалентными емкостями; необходимость использования итерационных алгоритмов поиска экстремумов сигналов в контурах обратной связи.
Из известных решений наиболее близким по технической сущности к заявляемому изобретению является «Устройство, предназначенное для снижения уровня отраженного электромагнитного поля», описанное в патенте GB 2322260, МКИ G01S 7/36 7/38, 1984 год. Устройство содержит моноимпульсный приемник радиоимпульсов РЛС противника, определяющий углы облучения объекта; средства изменения амплитуды и фазы принятых радиоимпульсов (управляемый фазовращатель, управляемый аттенюатор) и средства переизлучения этих радиоимпульсов в сторону РЛС противника. Указанное устройство также включает в себя запоминающее устройство, содержащее информацию о необходимых изменениях амплитуды и фазы радиоимпульсов.
Работа устройства в режиме адаптации заключается в изменении амплитуды и фазы принятых радиоимпульсов таким образом, чтобы создаваемое при их переизлучении ЭМ поле  компенсировало отраженное от объекта поле
компенсировало отраженное от объекта поле  в направлении на РЛС. То есть амплитуда поля, переизлучаемого устройством-прототипом, равна амплитуде рассеянного на объекте поля, а фаза сдвинута на π
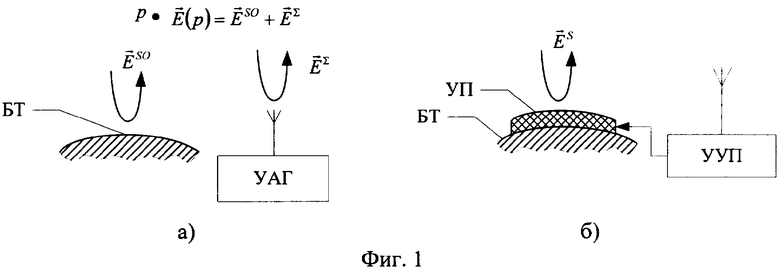
в направлении на РЛС. То есть амплитуда поля, переизлучаемого устройством-прототипом, равна амплитуде рассеянного на объекте поля, а фаза сдвинута на π  (фиг.1а). Для каждого угла облучения значения амплитуд и фаз переизлучаемых радиоимпульсов заданы априорно математическим выражением либо определяются экспериментально по критерию минимума рассеянного поля при облучении объекта «своей» РЛС в режиме обучения и хранятся в запоминающем устройстве.
(фиг.1а). Для каждого угла облучения значения амплитуд и фаз переизлучаемых радиоимпульсов заданы априорно математическим выражением либо определяются экспериментально по критерию минимума рассеянного поля при облучении объекта «своей» РЛС в режиме обучения и хранятся в запоминающем устройстве.
Признаками прототипа, совпадающими с существенными признаками заявляемого устройства, являются моноимпульсный приемник радиоимпульсов (в заявляемом устройстве - блок определения условий облучения) и запоминающее устройство (в заявляемом устройстве - узел хранения данных), прототип имеет два режима работы: режим обучения и режим адаптации.
Причины, препятствующие получению технического результата, заключаются в следующем. Переизлучение зондирующего сигнала демаскирует объект в направлениях, отличных от направления на РЛС, особенно в режиме усиления переизлучаемого компенсирующего сигнала. Техническая реализация прототипа с целью управления поляризационными характеристиками рассеянного поля существенно затруднена. Описанный в патенте прототип формально рассчитан для противодействия работе только одной РЛС противника на одной (фиксированной) частоте облучения, поскольку в его состав не включены средства для определения частоты облучения. Реализация режима адаптации рассеянного поля в высокочастотной области рассеяния на практике затруднительна из-за проявления статистических свойств радиолокационных характеристик рассеяния (РЛХ) нестабильных и протяженных объектов.
Задача, на решение которой направлено предлагаемое техническое решение, состоит в улучшении качества радиопротиводействия РЛС противника различного назначения путем полуактивного адаптивного управления поляризационными, амплитудными и фазовыми характеристиками рассеяния защищаемого объекта.
Технический результат достигается тем, что в устройстве адаптивного управления поляризационными и амплитудно-фазовыми характеристиками рассеяния радиолокационного объекта, содержащем блок определения условий облучения (углов, средней частоты облучения и типа облучающей объект РЛС), управляемое покрытие и узел хранения данных, имеющем два режима работы: режим обучения и режим адаптации, электродинамические свойства управляемого покрытия адаптивно настраиваются с помощью управляющего воздействия (сигнала), поступающего через буферный блок управления покрытием с выхода узла формирования управляющего воздействия и имеющего параметры, задаваемые узлом адаптивного управления, соединенным в режиме обучения с узлом управления РЛС и подключенным к узлу хранения данных и блоку определения условий облучения объекта, причем в режиме адаптации текущий критерий управления выбирается на основании текущих условий облучения из следующих критериев: создание в рассеянном поле интенсивной кроссполяризационной помехи, минимизация амплитуды рассеянного поля, создание комбинированной кроссполяризационной помехи и формирование диаграммы рассеяния объекта, имеющей противофазные боковые лепестки с нулем, ориентированным на облучающую РЛС, при этом управление поляризацией, амплитудой и фазой рассеянного поля производится в соответствии с установленным текущим критерием управления посредством выборки из узла хранения данных необходимой информации о параметрах управляющих воздействий, накапливаемой в режиме обучения устройства, в состав которого входит управляемое ферритовое покрытие, представляющее собой два намагниченных ферритовых слоя на металлической подложке, между которыми расположен анизотропно проводящий токонесущий тонкий слой, создающий управляющее намагничивающее поле с помощью импульсов тока, формируемых буферным блоком управления покрытием, в состав которого входит управляемое бинарное покрытие, поверхность которого состоит из набора управляемых бинарных элементов (модулей), способных находиться в двух различных устойчивых электродинамических состояниях, настраиваемое с помощью узла адаптивного управления таким образом, чтобы диаграммы рассеяния объекта на кополяризациях (и/или кроссполяризациях) имели противофазные боковые лепестки с нулем, ориентированным на источник облучения, за счет пространственно-временной реконфигурации бинарных элементов покрытий (переключения их размеров и формы) путем изменения двоичных электродинамических состояний элементов покрытий во времени, в состав которого включено N управляемых покрытий, каждое из которых независимо настраивается с помощью узла адаптивного управления и работает в определенных диапазонах частот и секторах углов облучения.
Технический результат заключается в адаптивной (по отношению к угловым и частотным условиям облучения) противорадиолокационной маскировке объекта с изменяемым во времени текущим критерием маскировки (адаптации) при облучении объекта несколькими РЛС противника. В качестве текущих критериев маскировки заявляемого устройства могут быть следующие критерии: создание в отраженном поле интенсивной кроссполяризацонной помехи, минимизация уровня амплитуды рассеянного поля, создание комбинированной кроссполяризационной помехи и формирование диаграммы рассеяния объекта, имеющей противофазные боковые лепестки с нулем, ориентированным на РЛС противника, для создания угловой ошибки сопровождения, срыва режима слежения цели по направлению или захвата на сопровождение цели боковыми лепестками РЛС противника.
Предлагаемое изобретение поясняется следующими фигурами.
Фиг.1 - работа двух устройств, реализующих активное (а) и пассивное (б) управление характеристиками рассеяния, где:
БТ - «блестящая точка»,
УАГ - устройство активного гашения радиолокационного эхо-сигнала,
УП - управляемое покрытие,
УУП - устройство управления покрытием.
Фиг.2 - структурная схема заявляемого устройства, в состав которого входят:
1 - приемная антенна бортовых средств радиоразведки;
2 - блок определения условий облучения объекта;
3 - управляемое покрытие (УП);
4 - буферный блок управления покрытием;
5 - узел формирования управляющего воздействия;
6 - узел адаптивного управления;
7 - узел управления РЛС, используемой в режиме обучения;
8 - узел хранения данных.
Также на фиг.2 введено обозначение:
9 - РЛС противника, обозначенная номером i=1,..., I.
Фиг.3 - временные диаграммы воздействий, применяемых для управления электродинамическим состоянием ферритового управляемого покрытия.
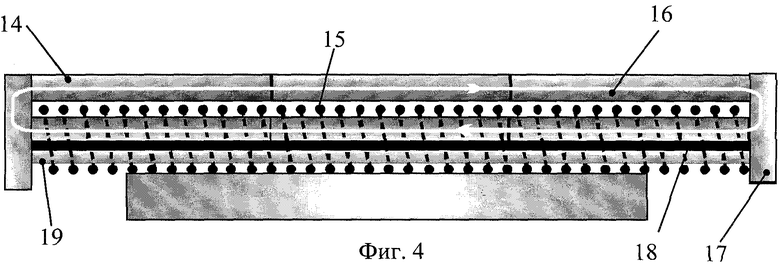
Фиг.4 - макет ферритового управляемого покрытия (ФУП) из нагруженных ферритовых пластинчатых элементов, где:
14 - слой из ферритовых квадратных пластин;
15 - намагничивающая система;
16 - магнитный поток;
17 - торцевые ферритовые пластины;
18 - металлическая подложка;
19 - диэлектрическая подложка.
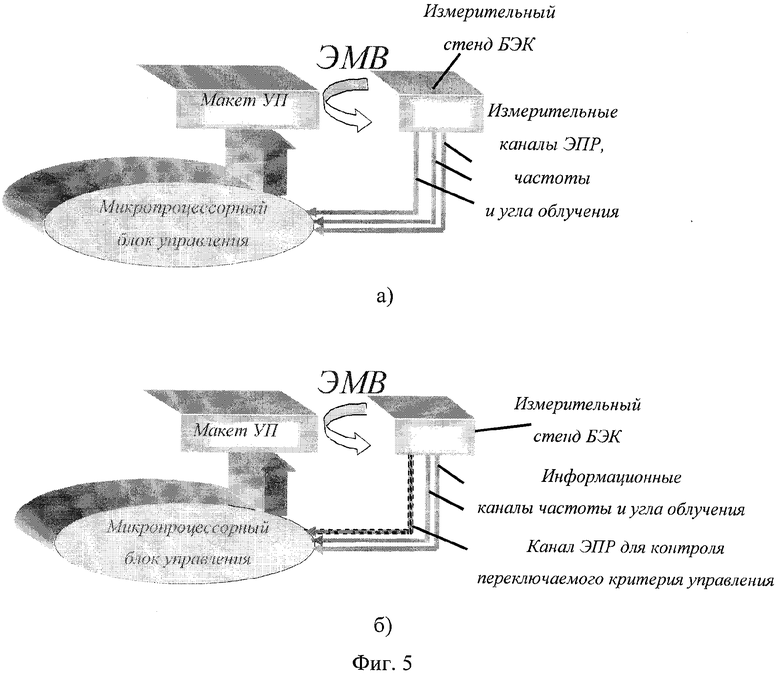
Фиг.5 - схемы работы макета заявляемого устройства в режиме обучения (а) в контуре с естественной внешней обратной связью и в режиме адаптивного управления (б) в контуре условной обратной связи с переключаемым критерием управления.
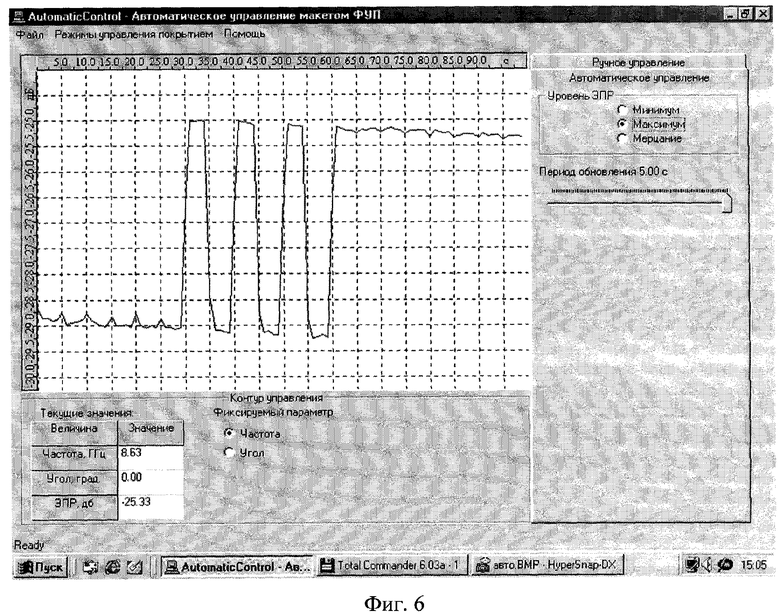
Фиг.6 - вид экрана в режиме компьютерного адаптивного управления параметрами макета ферритового управляемого покрытия с контуром условной обратной связи и переключаемым во времени критерием управления «Минимум ЭПР», «Мерцание», «Максимум ЭПР» в ходе эксперимента в условиях безэховой камеры.
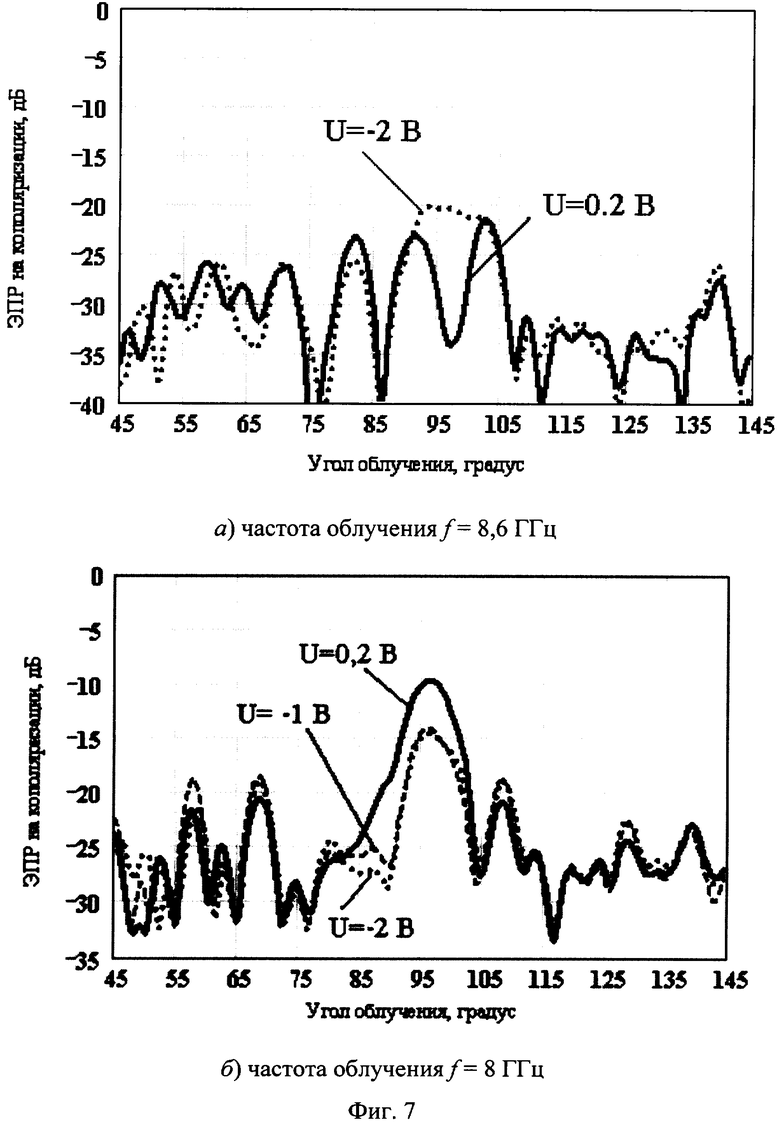
Фиг.7 - экспериментальные диаграммы обратного рассеяния макета ферритового управляемого покрытия на кополяризации на двух частотах облучения при различных постоянных управляющих воздействиях U.
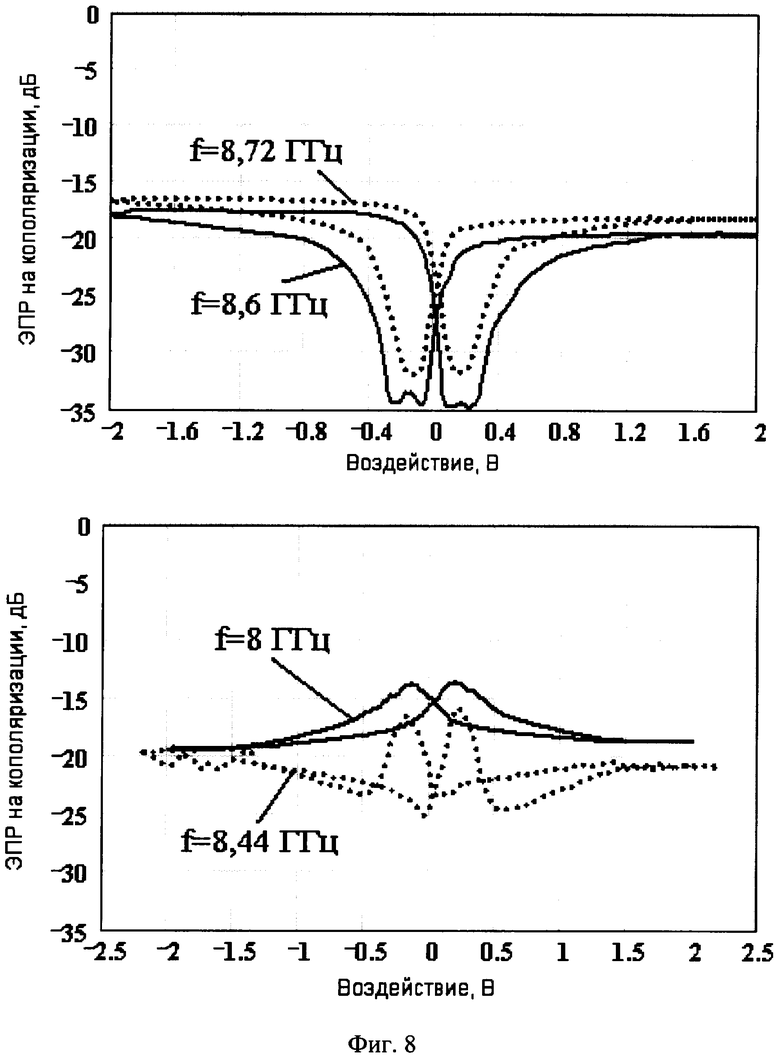
Фиг.8 - экспериментальные модуляционные характеристики эффективной площади рассеяния (ЭПР) макета ферритового управляемого покрытия на кополяризации при компьютерном управлении по полному циклу петли гистерезиса на четырех частотах облучения.
Работа устройства поясняется следующим описанием.
Блок 2, реализующий функции бортовых средств радиоразведки, осуществляет первичную обработку принимаемых антенной 1 радиоимпульсов i-x РЛС противника 9 (i=1, 2, 3 ..., 7) и передает узлу адаптивного управления 6 текущую информацию об углах падения {θi, ϕi} и средних частотах {ωi} ЭМ полей i-х радиолокационных станций, облучающих объект, а также об их типах. Число I ограничено функциональными возможностями блока 2 и узла 6. На основании полученных данных узел 6 осуществляет оценку степени угрозы каждой i-й РЛС, определяет параметры облучения θi, ϕi, ωi той РЛС, которая создает наибольшую угрозу защищаемому объекту, и устанавливает текущий критерий управления А характеристиками рассеянного на объекте поля. Узел 6 передает узлу 5 хранящиеся в узле 8 параметры управляющего покрытием 3 воздействия. При этом электродинамическое состояние покрытия 3, размещаемого на «блестящей точке» объекта, настраивается адаптивно к условиям облучения θi, ϕi, ωi под воздействием управляющего электрического и (или) магнитного полей таким образом, чтобы обеспечить характеристики рассеянного на объекте поля  , необходимые для радиопротиводействия i-й РЛС, в соответствии с текущим критерием управления А (см. фиг.1б).
, необходимые для радиопротиводействия i-й РЛС, в соответствии с текущим критерием управления А (см. фиг.1б).
Критерий управления характеристиками рассеяния объекта выбирается узлом 6, исходя из текущих условий. Каждому возможному набору условий облучения θi, ϕi, ωi и критерию управления А поставлены в соответствие хранящиеся в узле 8 параметры управляющих воздействий, обеспечивающих соответствующие электродинамические состояния покрытия 3. Накопление данных в узле 8 производится, как и в прототипе, в режиме обучения. При этом объект облучается «своей» РЛС, а параметры воздействия на покрытие 3, обеспечивающие заданный критерий А, определяются экспериментально в результате измерения характеристик рассеянного поля.
В зависимости от реализации УП заявляемое устройство может обеспечивать следующие критерии управления: создание в отраженном поле интенсивной кроссполяризационной помехи, минимизация уровня амплитуды рассеянного поля, создание комбинированной кроссполяризационной помехи и формирование диаграммы рассеяния объекта, имеющей противофазные боковые лепестки с нулем, ориентированным на РЛС противника. Заявляемое устройство имеет два режима работы: режим обучения и режим адаптации.
В режиме обучения маскируемый объект с установленным на нем устройством адаптивного управления характеристиками рассеяния размещается на полигоне (стенде) измерения РЛХ. Узел 7 подключается к РЛС полигона и формирует для нее команды изменения условий облучения объекта, а также получает и обрабатывает информацию о текущих значениях измеряемых характеристик рассеяния объекта. Узел 6 последовательно передает узлу 5 изменяемые с заданным шагом параметры воздействия для УП. Формируемое блоком 4 воздействие изменяет электродинамические свойства УП, что приводит к изменению РЛХ объекта. Для каждого из возможных критериев управления и заданного набора условий облучения производится обработка полученных узлом 7 данных о характеристиках рассеяния объекта и определяются параметры воздействия, обеспечивающие каждый из критериев управления. После окончания режима обучения при заданных условиях облучения объекта узел 7 передает РЛС команду о необходимости изменения условий облучения. Условия облучения, критерии управления и соответствующие им параметры воздействий записываются в узле 8.
В режиме адаптации принятые антенной 1 радиоимпульсы i-x облучающих РЛС передаются на входы моноимпульсного приемника и частотного дискриминатора, входящих в состав блока 2. Полученная блоком 2 информация о типе, средних частотах ωi и углах облучения θi, ϕi объекта i-й РЛС передается узлу 6, в котором, на основании имеющихся данных, определяется РЛС, создающая наибольшую угрозу защищаемому объекту, и устанавливается текущий критерий управления А характеристиками рассеянного поля. Узел 8 передает узлу 6 параметры управляющих покрытием 3 воздействий, соответствующих условиям облучения θi, ϕi, ωi и критерию управления А. Узел 6 передает полученные параметры управляющих воздействий узлу 5, который формирует сигнал управления покрытием. Вид и форма сигнала определяются типом используемого покрытия 3. Блок 4 служит для обеспечения необходимых уровней управляющих токов и (или) напряжений, подаваемых непосредственно на УП. Для увеличения быстродействия управления блок 4 необходимо располагать непосредственно у покрытия 3.
Для улучшения эффективности работы заявляемого устройства в широком диапазоне углов и частот облучения в его состав может быть включено N управляемых покрытий 3 и блоков 4 (N определяется конструкцией корпуса защищаемого объекта). Каждое УП устанавливается на «блестящей точке» корпуса и работает в определенном диапазоне частот  и секторе углов облучения для угла места
и секторе углов облучения для угла места  и азимутального угла
и азимутального угла  . Электродинамические состояния каждого УП независимо настраиваются под воздействием управляющих сигналов, формируемых узлом 5 посредством соответствующих блоков 4.
. Электродинамические состояния каждого УП независимо настраиваются под воздействием управляющих сигналов, формируемых узлом 5 посредством соответствующих блоков 4.
Для реализации указанных выше возможных критериев управления заявляемое устройство должно обеспечивать управление поляризацией, амплитудой и фазой рассеянного ЭМ поля. Для этого покрытие 3 должно представлять собой электродинамическую структуру, состоящую из управляемых элементов, например, в виде одного или нескольких магнитодиэлектрических слоев (пластин). Электродинамические параметры этих элементов при подаче на них от блока 4 управляющих воздействий должны обеспечивать изменение поляризации, амплитуды и фазы рассеянного ЭМ поля. В состав заявляемого устройства входит управляемое ферритовое покрытие, представляющее собой два намагниченных ферритовых слоя на металлической подложке, между которыми расположен анизотропно проводящий токонесущий тонкий слой, создающий управляющее намагничивающее поле с помощью импульсов тока, формируемых блоком 4. Для формирования диаграммы рассеяния объекта, имеющей противофазные боковые лепестки с нулем, ориентированным на РЛС противника, заявляемое устройство может включать в себя бинарное управляемое покрытие, представляющее собой набор независимо управляемых бинарных элементов (модулей) покрытия, имеющих два устойчивых электродинамических состояния. При этом управление характеристиками рассеяния может быть реализовано за счет пространственно-временной реконфигурации бинарных элементов покрытий (переключения их размеров и формы) путем изменения двоичных электродинамических состояний элементов покрытий во времени.
Возможность получения технического результата при осуществлении изобретения - адаптивной (по отношению к угловым и частотным условиям облучения) противорадиолокационной маскировки объекта с изменяемым во времени текущим критерием адаптации при облучении объекта несколькими РЛС противника - подтверждается тем, что авторами разработан и испытан макет устройства адаптивного управления рассеянием с помощью ферритового управляемого покрытия. Конструкция макета ФУП приведена на фиг.4. Макет имеет площадь 120×120 мм2, изготовлен из нагруженных ферритовых пластинчатых элементов марки 3СЧ23 и включает в себя: слой 14 из ферритовых квадратных пластин (со стороной квадрата 40 мм) толщиной 2,1 мм; торцевые ферритовые пластины 17, замыкающие магнитный поток 16; намагничивающую систему 15 в виде густой сетки (с шагом 2 мм) медных проводников марки ПЭВ-2-0.51 с наружным диаметром 0,56 мм; металлическую 18 и диэлектрическую 19 подложки. Электродинамическая схема макета ФУП представляет собой два частично намагниченных ферритовых слоя с анизотропно-проводящей решеткой токонесущих проводников между ними (толщиной 0,56 мм), нижний слой феррита располагается на металлической подложке.
Для проведения испытаний макет устройства подключался к радиолокационному измерительному стенду безэховой камеры (БЭК). В ходе эксперимента измерялась ЭПР макета на линейной кополяризации в диапазоне частот 8,5-10 ГГц.
Узел 6 макета заявляемого устройства создан на базе IBM-совместимого компьютера, в состав которого включены блоки аналогового и цифрового ввода-вывода, выполняющие функции узлов 5 и 7. Для получения информации об условиях облучения макета на вход узла 7 подсоединялись частотный выход приемного устройства и выход датчика азимутального угла поворота ϕ поворотного устройства измерительного стенда. Узел 5 посредством блока 4 осуществлял формирование в цепи управления макета ФУП биполярных импульсов тока специальной формы с амплитудами до 8...10 А. Были реализованы следующие режимы работы узла 5: режим управления постоянным воздействием (фиг.3а) и режим импульсного управления с малыми энергозатратами в состояниях магнитной памяти ФУП (фиг.3б). В режиме управления постоянным воздействием в цепи управления ФУП формировался отрицательный импульс сброса с длительностью Тсб и амплитудой Uсб, после которого модуль формирования управляющего воздействия переключался в режим генерации постоянного положительного напряжения Uс (фиг.3а). В режиме импульсного управления в магнитной системе покрытия формировался отрицательный импульс сброса заданной длительности Тсб и амплитуды Uсб и следующий за ним пилообразный импульс состояния длительностью Тп и амплитуды Uп (фиг.3б). Режим импульсного управления предназначался для снижения энергозатрат на управление ферритовыми покрытиями с магнитной памятью. Сигнал на выходе узла 5 усиливался блоком 4 и подавался в цепь управления ФУП.
Программное обеспечение узла 6 осуществляло адаптивное управление макетом ФУП со следующими переключаемыми во времени критериями управления: «минимум ЭПР», «максимум ЭПР» и «мерцание». В режиме «мерцание» макет переключался из состояния, соответствующего минимуму ЭПР, в состояние максимума ЭПР и обратно с заданным периодом.
Рассмотрим работу макета заявляемого устройства в режиме обучения (фиг.5а). В данном режиме измерительный стенд БЭК моделировал работу РЛС, используемой для обучения устройства. Входящая в состав программы адаптивного управления подпрограмма обучения в зависимости от выбранного режима управления формировала и подавала на макет ФУП либо постоянные воздействия с импульсом сброса (фиг.3а), либо импульсные воздействия (фиг.3б). Уровень сигнала последовательно изменялся с заданным шагом dU в заданном диапазоне Uмин-Uмакс. Подпрограмма обучения последовательно изменяла частоту и угол облучения макета ФУП в заданных пределах fмин-fмакс и ϕмин-ϕмакс с шагом Δf и Δϕ соответственно. Для каждого набора условий облучения производилось измерение ЭПР макета посредством узла 7 при различных параметрах управляющего сигнала, формируемого узлом 5. При этом подпрограмма обучения определяла и сохраняла в узле 8 управляющие воздействия, обеспечивающие заданные критерии управления рассеянием. По окончании режима обучения подпрограмма предоставляла возможность просмотра параметров управления, сохраненных в узле хранения данных и обеспечивающих заданные критерии управления рассеянием.
В режиме адаптивного управления узел 6 использовал хранящиеся в узле 8 данные и посредством узла 5 формировал управляющие макетом ФУП воздействия, обеспечивающие заданный критерий управления при изменяющихся условиях облучения. В этом режиме измерительный стенд БЭК моделировал работу облучающей РЛС противника и работу станции радиоразведки с информационными каналами частоты и угла облучения (фиг.5б). Канал ЭПР стенда в данном режиме служил для контроля качества выполнения текущих критериев управления. Используя текущую информацию о частоте и углах облучения, программа адаптивного управления осуществляла поиск в узле 8 параметров управляющего воздействия, обеспечивающего текущий критерий управления, и передачу их узлу 5.
Экранные интерфейсы программы адаптивного управления приведены на фиг.6 для трех различных переключаемых во времени критериев управления («Минимум ЭПР», «Мерцание», «Максимум ЭПР»). Программа производит отображение текущих значений частоты и угла облучения макета и осциллограмму наблюдаемой ЭПР макета за интервал времени 100 сек.
При измерениях в качестве эталона использовалась медная пластина с такими же геометрическими размерами, как у макета ФУП. На фиг.7 приведены экспериментальные диаграммы обратного рассеяния (ДОР) макета на кополяризации для различных параметров управляющих воздействий Uc. Диаграммы измерены на частотах облучения 8 ГГц и 8,6 ГГц в секторе ±50° азимутального угла облучения. Максимум ЭПР эталона соответствовал углу облучения 95°. Как следует из графика, изображенного на фиг.7, помеховая модуляция остатка рассеянного поля осуществлялась в главном и боковых лепестках ДОР и составляла до 17 дБ в главном и до 1...5 дБ в боковых лепестках. Экспериментальные модуляционные характеристики ЭПР макета ФУП при компьютерном управлении по полному циклу петли гистерезиса на частотах облучения 8 ГГц, 8,4 ГГц, 8,6 ГГц и 8,74 ГГц изображены на фиг.8. Как следует из приведенных графиков, твист-эффект при рассеянии, когда энергия рассеянного поля переводится на кроссполяризацию (на кополяризации наблюдается минимум ЭПР), максимален на частоте 8,6 ГГц и составляет 35 дБ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АДАПТИВНОГО УПРАВЛЕНИЯ СПЕКТРАЛЬНЫМИ ХАРАКТЕРИСТИКАМИ РАССЕЯНИЯ РАДИОЛОКАЦИОННОГО ОБЪЕКТА | 2006 |
|
RU2319167C1 |
| Способ измерения эффективной поверхности рассеяния объектов в экспресс-режиме в условиях естественного фона радиолокационными средствами и устройство для его осуществления | 2015 |
|
RU2616596C2 |
| Специализированный программно-аппаратный комплекс автоматизированного проектирования радиолокационных станций, комплексов и систем, а также их компонентов (СПАК) | 2021 |
|
RU2778139C1 |
| Способ формирования объектов имитируемой модели фоноцелевой обстановки на необитаемой территории ледового пространства | 2021 |
|
RU2816461C2 |
| Способ формирования мишенной позиции в экспресс-режиме при ограниченном времени подлета противокорабельных ракет с комбинированными ГСН, включающий комплекс известных устройств для его осуществления и визуализации | 2019 |
|
RU2726026C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ | 2023 |
|
RU2815895C1 |
| Индивидуальный комплект многоспектральных технических средств маскировки подвижных военных объектов с адаптивной системой управления физическими параметрами | 2022 |
|
RU2791934C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ОБЪЕКТОВ И МНОГОПОЗИЦИОННЫЙ РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2516221C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ОБЪЕКТОВ И РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2371730C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАССЕЯНИЯ ОБЪЕКТОВ | 2007 |
|
RU2332685C1 |

Устройство адаптивного управления поляризационными и амплитудно-фазовыми характеристиками рассеяния радиолокационного объекта относится к радиолокационной технике и предназначено для адаптивного управления поляризационными, амплитудными и фазовыми характеристиками рассеяния объектов оборонной техники с ограниченной степенью изменчивости характеристик рассеяния. Достигаемым техническим результатом является улучшение качества радиопротиводействия РЛС противника путем полуактивного адаптивного управления поляризационными, амплитудными и фазовыми характеристиками рассеяния защищаемого объекта. Данное устройство функционирует в двух режимах - обучения и адаптации - и включает в себя маскирующее управляемое покрытие, которое может быть выполнено различным образом и электродинамические свойства которого настраиваются с помощью управляющего воздействия, поступающего через буферный блок управления покрытием с выхода узла формирования управляющего воздействия и имеющего параметры, задаваемые узлом адаптивного управления, соединенным с используемым в режиме обучения узлом управления РЛС и подключенным к узлу хранения данных и блоку определения условий облучения объекта. 3 з.п. ф-лы, 8 ил.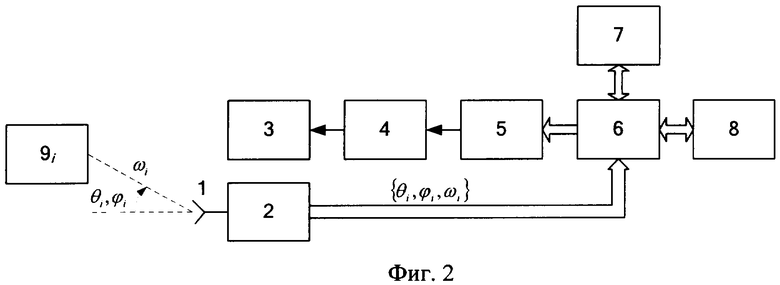
| ПАССИВНАЯ ИММУНИЗАЦИОННАЯ ТЕРАПИЯ НА ОСНОВЕ ПЕПТИДОВ ДЛЯ ЛЕЧЕНИЯ АТЕРОСКЛЕРОЗА | 2003 |
|
RU2322260C2 |
| СИСТЕМА АДАПТИВНОЙ КОМПЕНСАЦИИ РАДИОМЕТРИЧЕСКОГО КОНТРАСТА НАЗЕМНЫХ ОБЪЕКТОВ | 2002 |
|
RU2214578C1 |
| РАДИОПОГЛОЩАЮЩЕЕ ПОКРЫТИЕ, СПОСОБ ПОЛУЧЕНИЯ И УПРАВЛЕНИЯ ЕГО СВОЙСТВАМИ И УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ОТРАЖАТЕЛЬНЫХ СВОЙСТВ ПОКРЫТИЙ НА ОБЪЕКТАХ В СВЧ ДИАПАЗОНЕ РАДИОВОЛН | 2000 |
|
RU2155420C1 |
| СПОСОБ АДАПТИВНОГО ПРЕОБРАЗОВАНИЯ ПОЛЯРИЗАЦИИ РАДИОСИГНАЛОВ | 1993 |
|
RU2090963C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ И РАЗВЕДЫВАТЕЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2205418C1 |
| US 6133865 A, 17.10.2000 | |||
| US 4937582, 26.06.1990 | |||
| СПОСОБ ИМИТАЦИИ СИЛ РЕЗАНИЯ | 0 |
|
SU366374A1 |

