Изобретение относится к области систем автоматического управления, в частности к технике формирования управляющих сигналов.
Наиболее близким к описываемому изобретению по технической сущности и достигаемому эффекту является способ компенсации люфта в механической передаче [1], заключающийся в суммировании сигнала управления с сигналом коррекции, при этом сигнал коррекции формируют путем преобразования сигнала, пропорционального разности углов поворота входного и выходного валов механической передачи, в сигнал с тем же знаком и с постоянной амплитудой, равной половине зоны люфта.
Недостатками данного способа являются возможность реализации лишь в системах с заранее известными параметрами люфта, трудность настройки вследствие большого числа элементов.
Технический результат изобретения - увеличение точности.
Указанный технический результат достигается путем суммирования входного сигнала с сигналом коррекции, при этом сигнал коррекции формируют в нечеткой форме на основе теории нечетких множеств, а именно: фаззифицируют (перевод в нечеткую область) входной сигнал, его производную, и с помощью процедуры использования продукционных правил производят нечеткий логический вывод с последующей его дефаззификацией (процедура преобразования нечеткого множества в четкое число).
Отличительными от прототипа признаками является формирование сигнала коррекции на основе математического аппарата нечетких множеств с использованием входного сигнала или входного сигнала и его производной, что обеспечивает простоту реализации, сокращение элементной базы без потери эффективности и предотвращает влияние нелинейностей, обусловленных использованием релейных элементов и негативно влияющих на точность коррекции системы. При этом в качестве сигнала, определяющего знак сигнала коррекции, используется входной сигнал и его производная, что позволяет повысить точность и улучшить динамические характеристики системы управления.
Таким образом, предложенный способ отвечает критериям изобретения «новизна» и «положительный эффект».
На фиг.1 изображена блок схема для осуществления рассматриваемого способа при коррекции люфта, где 1 - Qвх входной (задающий) сигнал; 2 - сумматор; 3 - компенсатор; 4 - Uу сигнал коррекции; 6 - Qвых выходной сигнал; 7 - дифференцирующие звено; 8 - Uδ сигнал ошибки; 9 - люфт.
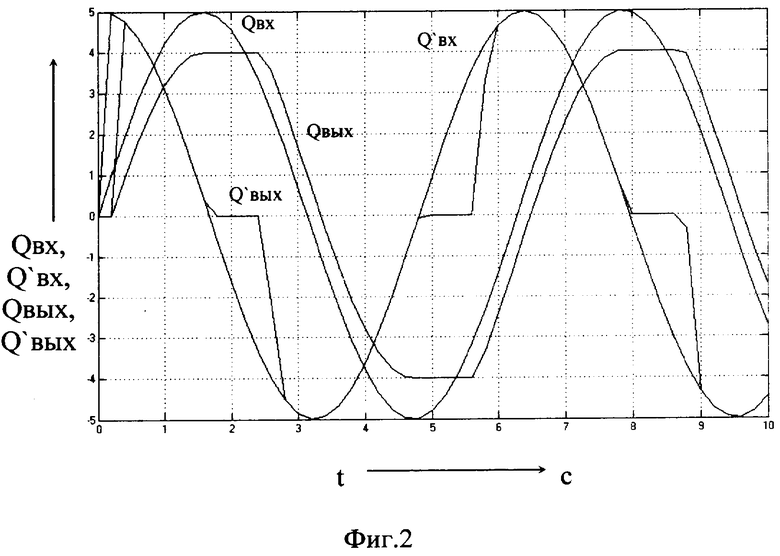
На фиг.2 представлена отработка синусоидального сигнала без компенсации люфта: Qвх - синусоидальный сигнал; Q'вх - производная синусоидального сигнала; Qвых - выходной сигнал после отработки люфта; Q'вых - производная выходного сигнала.
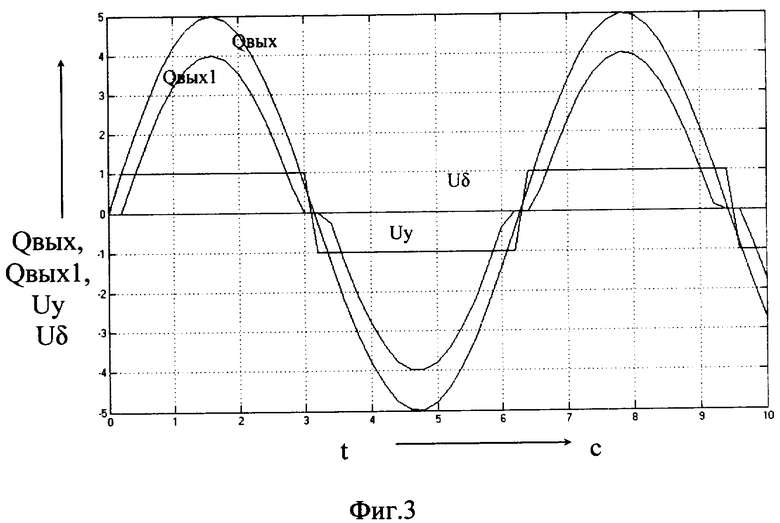
На фиг.3 представлена отработка синусоидального сигнала с компенсацией люфта: Qвых1 - выходной сигнал без компенсации; Qвых - выходной сигнал с компенсацией; Uу - сигнал коррекции; Uδ - сигнал ошибки при компенсации.
Фиг.4 - компенсация люфта предложенным способом для различных амплитуд входного сигнала Qвх (А=0.5; 7; 15).
На фиг.5 - компенсация люфта предложенным способом для различных частот входного сигнала Qвх (f=0.5; 0.9; 2 с-1).
Корректирующий сигнал для компенсации нелинейностей формируется по предложенному способу на основе математического аппарата нечетких множеств.
Процесс формирования корректирующего сигнала состоит из трех этапов.
Первый этап - формирование функций принадлежности, необходимых для перевода четких параметров входного сигнала и его производной в лингвистические, в этом случае компенсатор будет иметь два входа. Определяется вид функций принадлежности - например треугольный, как для самого сигнала, так и для его производной. Количество функций принадлежности входного сигнала задается равным трем, это связанно с принадлежностью его к положительной, отрицательной или нулевой области, что достаточно для выработки определенного сигнала коррекции по предложенному способу. Аналогичное действие выполняется и с производной сигнала.
Второй этап - определение вида и характера управляющего воздействия. Очевидно, что для компенсации нелинейности вида «люфт» возможны три различных корректирующих сигнала:
1) положительный - соответствующий свободному ходу слева b,
2) отрицательный - соответствующий свободному ходу справа -b,
3) нулевой - характерный для случая, когда входной сигнал равен нулю.
Используем в качестве алгоритма нечеткого логического вывода, например, алгоритм Сугено 0-го порядка, в качестве метода дефаззификации метод «wtaver» - взвешенное среднее, реализация логической операции И методом «prod» - умножение, логической операции ИЛИ методом «probor» - вероятностное.
Необходимо также учесть при настройке диапазон изменения сигнала, в рассматриваемых примерах он был выбран -100 до 100.
Третий этап - создание продукционных правил, необходимых для нечеткого логического вывода. Таблица правил будет включать следующие строки:
1. If (input1 is mf2) and (input1 is mf2) then (output1 is mf2), если сигнал на входе положительный и его производная положительная, тогда выходной корректирующий сигнал положительный и равный b,
2. If (output1 is mf2) and (input1 is mf1) then (output1 is mf1), если сигнал на входе положительный и его производная отрицательная, тогда выходной корректирующий сигнал отрицательный и равный -b,
3. If (input1 is mf1) and (input1 is mf1) then (output1 is mf1), если сигнал на входе отрицательный и его производная отрицательная, тогда выходной корректирующий сигнал отрицательный и равный -b,
4. If (input1 is mf1) and (input1 is mf2) [hen (output1 is mf1), если сигнал на входе отрицательный и его производная положительная, тогда выходной корректирующий сигнал положительный и равный b,
5. If (input1 is mf3) or (input1 is mf3), then (output1 is mf3), если сигнал на входе или его производная находиться в нулевой области, тогда выходной корректирующий сигнал нулевой.
Способ компенсации статических нелинейностей, заключающийся в суммировании входного сигнала с сигналом коррекции, отличающийся тем, что сигнал коррекции для компенсации нелинейности типа «люфт» формируют в нечеткой форме, при помощи фаззификации входного сигнала и его производной производят нечеткий логический вывод с помощью процедуры использования продукционных правил, с последующей его дефаззификацией, причем упомянутые правила имеют следующий вид: если входной сигнал положительный и его производная положительная, тогда выходной корректирующий сигнал положительный и равный b, если сигнал на входе положительный и его производная отрицательная, тогда выходной корректирующий сигнал отрицательный и равный -b, если сигнал на входе отрицательный и его производная отрицательная, тогда выходной корректирующий сигнал отрицательный и равный -b, если сигнал на входе отрицательный и его производная положительная, тогда выходной корректирующий сигнал положительный и равный b, если сигнал на входе или его производная находиться в нулевой области, тогда выходной корректирующий сигнал нулевой, где b - величина сигнала, равная свободному ходу люфта.
Сравнение графиков изменения входных и выходных сигналов (фиг.2, 3, 4), полученных путем математического моделирования, показывает эффективность коррекции нелинейности типа «люфт» в широком спектре изменения амплитуды и частоты входного (задающего) сигнала.
Источники информации
1. Авторское свидетельство № 531127, кл. G05В 5/01. //В.Б.Житков, Н.А.Лакота, Б.В.Никанчиков, В.А.Челышев. Способ компенсации люфта в механической передаче. Заявлено 24.07.74.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2296355C2 |
| Система оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763384C1 |
| Способ оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763125C1 |
| ОПТОЭЛЕКТРОННЫЙ НЕЧЕТКИЙ ПРОЦЕССОР | 2011 |
|
RU2446436C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ПАРА КОТЛОАГРЕГАТА | 1999 |
|
RU2151342C1 |
| Способ обеспечения линейности масштабного коэффициента маятникового широкодиапазонного акселерометра компенсационного типа | 2016 |
|
RU2627970C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289154C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ПРОВЕРКИ РАСХОДОМЕРА | 2007 |
|
RU2380660C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ УРОВНЯ РАБОЧЕЙ СРЕДЫ В РЕЗЕРВУАРЕ | 1998 |
|
RU2131084C1 |
| УСТРОЙСТВО И СПОСОБ ПРОВЕРКИ РАСХОДОМЕРА | 2002 |
|
RU2262670C2 |


Изобретение относится к области систем автоматического управления, в частности к технике формирования управляющих сигналов. Техническим результатом данного изобретения является повышение точности компенсации люфта, улучшение динамических характеристик систем управления. Отличительной особенностью способа является применение нечеткого аппарата для формирования сигнала коррекции на основе анализа значений входного сигнала и его производной. 5 ил.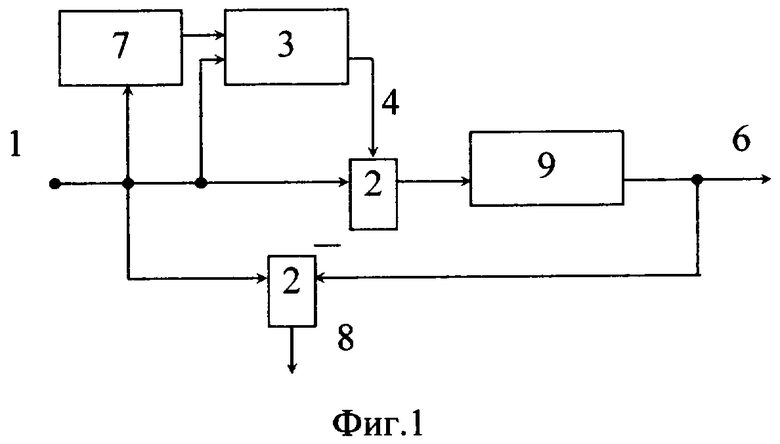
Способ компенсации статических нелинейностей, заключающийся в суммировании входного сигнала с сигналом коррекции, отличающийся тем, что сигнал коррекции для компенсации нелинейности типа «люфт» формируют в нечеткой форме при помощи фаззификации входного сигнала и его производной, производят нечеткий логический вывод с помощью процедуры использования продукционных правил, с последующей его дефаззификацией, причем упомянутые правила имеют следующий вид: если входной сигнал положительный и его производная положительная, тогда выходной управляющий сигнал положительный и равный b, если сигнал на входе положительный и его производная отрицательная, тогда выходной управляющий сигнал отрицательный и равный -b, если сигнал на входе отрицательный и его производная отрицательная, тогда выходной управляющий сигнал отрицательный и равный -b, если сигнал на входе отрицательный и его производная положительная, тогда выходной управляющий сигнал положительный и равный b, если сигнал на входе или его производная находятся в нулевой области, тогда выходной управляющий сигнал нулевой, где b - величина равная свободному ходу люфта.
| Способ компенсации люфта в механической передаче | 1974 |
|
SU531127A1 |
| Система адаптивного управления технологическими процессами | 1988 |
|
SU1619231A1 |
| 0 |
|
SU237317A1 | |
| US 5057992 A, 15.10.1991. | |||

