(54) СПОСОБ КОМПЕНСАЦИИ ЛЮФТА В МЕХАНИЧЕСКОЙ ПЕРЕДАЧЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| СПОСОБ КОМПЕНСАЦИИ СТАТИЧЕСКИХ НЕЛИНЕЙНОСТЕЙ | 2004 |
|
RU2323463C2 |
| Устройство компенсации люфта | 1979 |
|
SU1104463A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2296355C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289154C2 |
Изобретение относится к области систем автоматического управления и может найти применение в системах автомат1-1ческого управ ления с люфтом в механической передаче.
Известен способ компенсации люфта в
механической передаче ) заключающийся в том, что сигнал управления суммируют с сигналом коррекпии, который формируют путем суммирования сигналов, пропорциональных углам поворота входного и выход- ного валов и усиленных соответственно с коэффициентами, пропорциональными моментам инерции вращающихся частей на входном и выходном валах. Однако указанный способ дает хорощие результаты лишь при постоянных параметрах механической передачи и нагрузки и отсутствии моментов сопоотивлений на входном и выходном валах.
Известен также способ компенсации люфта в механической передаче 2., заключающийся в том, что оценивают знак скорости входного вала, формируют из сигнала, пропорционального углу поворота входного вала, вне зависимости от его величины ступенчатый сигнал коррекции, аплитуда которого постоянна и равна половине зоны люфта, а полярность совпадает с полярностью скорости входного вала, и смещают угол поворота входного вала на величину сигнала коррекции. Однако этот способ имеет ограниченную область применения, так как предназначен для компенсации люфта в ненагруженных абсолютно жестких механических передачах (передачах приборного типа).
Для щирокого класса систем автоматического управления нагруженные механические передачи от вала двигателя к объекту движения (входной вал) имеют люфты, упругие звенья, а объект движения может подвергаться воздействию внеашего момента. Передачи приборного типа являются частотным случаем нагруженных механических передач.
В случае.применения второго известного способа компенсации люфта при действии внешнего момента на объект движения или ппи колебательных перемещениях объекта движения выходной вал соверщает неконтро3
лируемые движения в зоне люфта, при этом; ригнап коррекции равен нулю, что приводит к появлению ошибки в передаче движения от входного вала к выходному, вызванной
дгцофто(м.
Целью изобретения является компенсация люфта в нагруженных механических передачах.
По предложенному способу сигнал управления суммируют с сигналом коррекции, который формируют путем преобразования сигнала, пропорционального разности углов поворота входного и выход ojo валов механической передачи, в сигнал с тем же знаком и с постоянной амплитудой, равной половине зоны люфта.
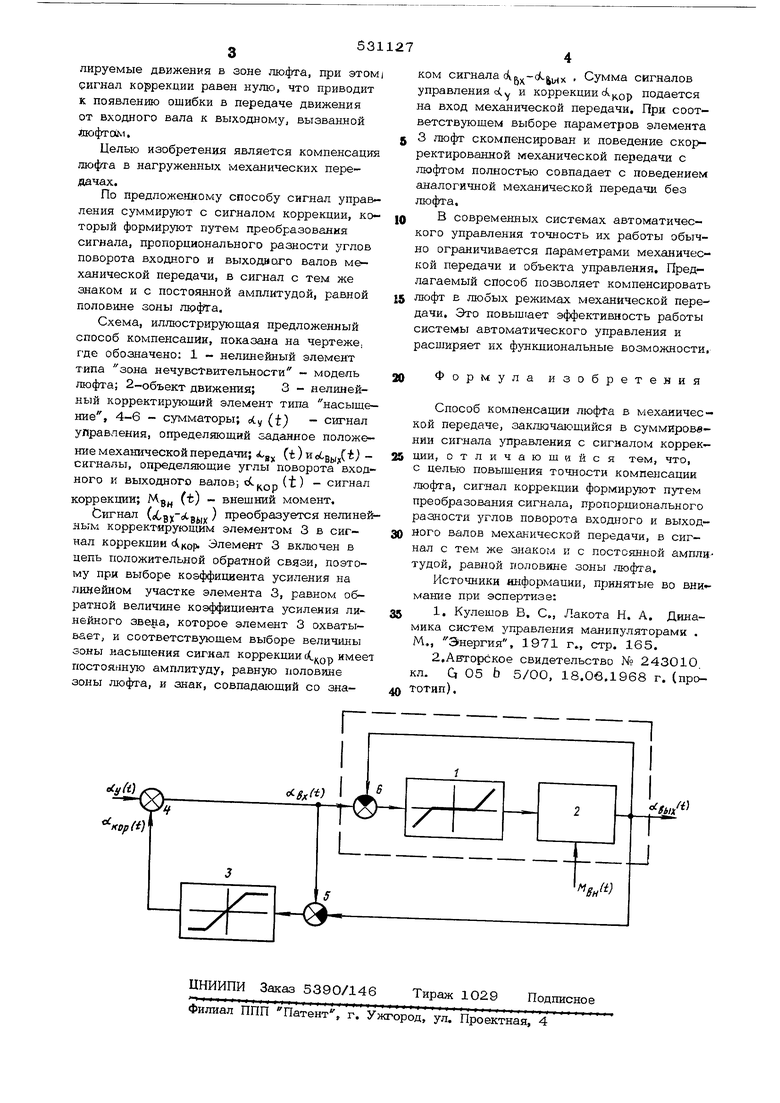
Схема, иллюстрирующая предложенный способ компенсации, показана на чертеже, где обозначено: 1 - нелинейный элемент типа зона нечувствительности - модель люфта; 2-объект движения; 3 - нелинейный корректирующий элемент типа насыщение, 4-6 - сумматоры; Яу (t) - сигнал управления, определяющий заданное положение механической передачи; g (t)иc6в|,(fc/ сигналы, определяющие углы поворота входного и выходного валов; (t) - сигнал коррекции; Mj (t) - внещний момент.
Сигнал преобразуется нелиненым корректирующим элементом 3 в сигнал коррекции ко| Элемент 3 включен в цепь положительной обратной связи, поэтому при выборе коэффициента усиления на линейном участке элемента 3, равном обратной величине коэффициента усиления линейного звена, которое элемент 3 охватывает, и соответствующем выборе величины зоны насыщения сигнал коррекции (.ор «ме постоянную амплитуду, равную половине зоны люфта, и знак, совпадающий со зна531127
ом сигнала Сумма сигналов управленияс у и коррекции подается а вход механической передачи. При соответствующем выборе параметров элемента 3 люфт скомпенсирован и поведение скорьректированной механической передачи с люфтом полностью совпадает с поведением аналогичной механической передачи без люфта.
В современных системах автоматического управления точность их работы обычно ограничивается параметрами механической передачи и объекта управления. Предлагаемый способ позволяет компенсировать люфт в любых режимах механической пере дачи. Это повышает эффективность работы системы автоматического управления и расширяет их функциональные возможности.
Формула изобретения
Способ компенсации люфта в механичесой передаче, заключающийся в суммироваии сигнала управления с сигналом коррекции, отличающийся тем, что, с целью повышения точности компенсации люфта, сигнал коррекции формируют путем преобразования сигнала, пропорционального разности углов поворота входного и выходного валов механической передачи, в сигнал с тем же знаком и с постоянной амплитудой, равной половине зоны люфта.
Источники информации, принятые во вни«мание при эспертизе:
1, Кулешов В. С., Лакота Н. А, Динамика систем управления манипуляторами . М., Энергия. 1971 г., стр. 165.
2,Авторское свидетельство № 243010. кл. G 05 Ь 5/00, 18.06.1968 г, (прототип) .
п
Г
