Способ относится к измерительной технике и может быть использован в области производства приборов для измерения линейного ускорения.
В системах управления высокоманевренных объектов ракетно-космической техники в последнее время получили распространение кварцевые и кремниевые акселерометры линейных ускорений с широким диапазоном измерения.
К широкому диапазону измерения следует отнести диапазон измерения линейных ускорений от ±20 g и выше, практически до ±50 g. Линейность масштабного коэффициента акселерометра линейных ускорений является важнейшей технической характеристикой, определяющей класс измерителя линейных ускорений.
Помимо целого ряда погрешностей, приводящих к нелинейности масштабного коэффициента [1], для акселерометров с широким диапазоном измерения выявлена одна специфическая погрешность, приводящая к нелинейности масштабного коэффициента при задании линейных ускорений, начиная с ±20 g и выше.
Исследования этой погрешности и способ повышения линейности масштабного коэффициента за счет введения корректировок параметров системы действующих сил опубликованы в единственной по этому вопросу работе [2].
В работе [2] исследована природа возникновения погрешности, названной автором разбалансировкой маятника акселерометра. Разбалансировка возникает вследствие несовпадения точек приложения к маятнику трех сил: инерционной силы, пропорциональной измеряемому линейному ускорению, силы Ампера, реализуемой магнитоэлектрическим датчиком момента, как правило, плунжерного типа, и газодинамической силы, возникающей при перемещении пластины с маятниковостью в герметичном корпусе чувствительного элемента, заполненном инертным газом. Взаимное смещение точек приложения этих трех сил возникает по конструкторским и технологическим причинам. Действительно, в плунжерном датчике момента обычно используются две катушки, которые приклеиваются к пластине с двух сторон, в геометрическом центре. Катушки имеют отверстия, в которые входят магниты датчика момента.
Зазор между магнитом и катушкой должен быть равномерным, величина зазора обычно не превышает десятых долей мм, максимум 1-1,8 мм на сторону. Приклеить катушки без смещения от центра на несколько сотых, а иногда и десятых долей мм технологически невозможно. Сила Ампера Fмэ=B⋅I⋅n⋅Lср⋅sinα, где В - магнитная индукция в зазоре, I - ток, n, Lср - число витков в катушке датчика и средняя длина витка, α - угол ориентации направления тока относительно направления вектора магнитной индукции В. Смещение катушки относительно центра приводит не только к смещению центра масс относительно геометрического центра системы сил, но и к неравномерности рабочего зазора в датчике момента, т.е. к неравномерности распределения индукции в зазоре и соответствующему смещению точки приложения силы Ампера.
При неравномерном зазоре смещается и точка приложения газодинамической силы. Этих малых взаимных смещений при линейных ускорениях от ±20 g и выше достаточно для того, чтобы существенным образом повлиять на зависимость выходной информации акселерометра от входного воздействия - задаваемого линейного ускорения, при этом зависимость имеет ярко выраженную нелинейность.
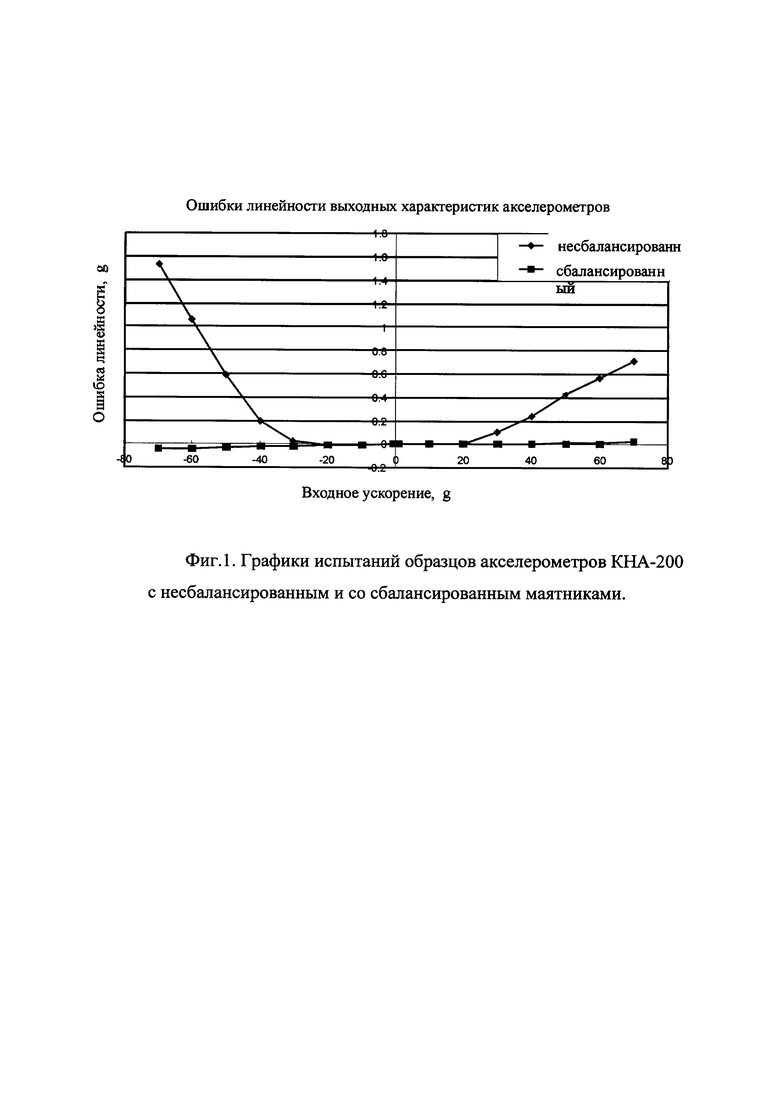
Существенно нелинейный характер масштабного коэффициента в акселерометрах, имеющих разбалансировку маятникового узла, подтвержден автором работы [2] экспериментально (фиг. 1).
Нелинейный характер зависимости понятен и из физики явления.
Если центр масс, который определяется в основном массой катушек, смещен относительно геометрического центра системы сил, то при действии линейного ускорения пластина будет испытывать не только изгибный момент вокруг оси торсиона, но и скручивающий момент вокруг оси, лежащей в плоскости пластины и перпендикулярной оси торсиона. К этому возмущающему моменту добавляется момент вследствие неравномерности рабочего зазора, что и определяет ярко выраженную нелинейную зависимость масштабного коэффициента акселерометра при значительных величинах линейных ускорений. Для обеспечения линейности масштабного коэффициента в работе [2] предложен способ корректировки параметров системы действующих сил.
В качестве прототипа принят этот предложенный в [2] способ обеспечения линейности масштабного коэффициента компенсационных маятниковых акселерометров, имеющих разбалансировку маятника.
Способ-прототип заключается в следующем. Выполняют смещение точки приложения инерционной силы путем перемещения центра масс, для чего на пластину либо устанавливают балансировочный груз, либо выполняют балансировочное отверстие [2, стр. 14]. По утверждению автора: «Полной балансировки маятника достигнуть не удается. В результате приходится смещать компенсационную силу относительно центра катушки плунжерного датчика. Обычно это обеспечивается путем выполнения арочных выборок в кольцевом зазоре магнитной системы плунжерного датчика» [2, стр. 6]. Результат измерения нелинейности масштабного коэффициента акселерометра с несбалансированным и со сбалансированным маятником приведен в [2, стр. 14] и повторен на фиг. 1.
Прототип имеет недостаток, заключающийся в следующем.
Характер и величина взаимного смещения точек приложения упомянутых трех сил для каждого изготавливаемого акселерометра индивидуальный. На одном акселерометре, для которого приведен результат компенсации разбалансировки [2, стр. 14], можно выполнить подбор груза либо размещение балансировочного отверстия и арочных выборок, обеспечивающих компенсацию разбалансировки. При изготовлении акселерометров в производстве такой индивидуальный подбор элементов компенсации нетехнологичен. Если же ввести в документацию акселерометра одинаковое для всех изготавливаемых акселерометров размещение балансировочного отверстия и арочных выборок либо балансировочный груз определенной величины, то это может дать обратный эффект.
Действительно, если подробнее рассмотреть способ-прототип, то можно выделить следующие операции для случая обеспечения точной балансировки, т.е. обеспечения полного устранения нелинейности масштабного коэффициента вследствие указанной погрешности.
1. При проектировании акселерометра разрабатывается инструкция по регулированию, в которой даются рекомендации по величине и координатам установки грузов на пластине либо по координатам выполнения балансировочного отверстия и арочных выборок в зависимости от величины измеренной нелинейности масштабного коэффициента.
2. Каждый изготовленный акселерометр устанавливают на центрифугу и задают ряд значений положительных и отрицательных линейных ускорений.
3. При каждом заданном ускорении измеряют выходную информацию, например количество информационных импульсов. (При аналоговой обратной связи также возможно получение выходной информации в количестве импульсов, например при использовании преобразователя «напряжение-частота» вне контура обратной связи.)
4. Пользуясь указаниями, приведенными в инструкции по регулированию, выбирают средство компенсации (установку груза, выполнение балансировочного отверстия, выполнение арочных выборок).
5. Разбирают акселерометр.
6. Выполняют балансировочную операцию.
7. Вновь собирают акселерометр.
8. Проверяют линейность масштабного коэффициента, повторяя контроль на центрифуге. Если не осуществлять индивидуальную корректировку параметров акселерометра, а предусмотреть в документации установку балансировочных элементов, одинаковых для всех образцов акселерометров данного типа конструкции, то результат такой корректировки линейности может быть либо достаточно грубым, либо отрицательным.
Задачей изобретения является разработка технологичного и высокоточного способа обеспечения линейности масштабного коэффициента широкодиапазонного маятникового акселерометра компенсационного типа.
Технический результат достигается тем, что в способе обеспечения линейности масштабного коэффициента широкодиапазонного маятникового акселерометра компенсационного типа, заключающемся в том, что в процессе наладки устанавливают акселерометр на центрифугу, задают последовательно ряд линейных ускорений в диапазоне измерения акселерометра, измеряют выходной сигнал акселерометра в зависимости от величины заданного линейного ускорения, корректируют параметры системы, обеспечивая линейность зависимости выходного сигнала от заданного линейного ускорения, согласно изобретению после измерения последовательности значений зависимости выходной информации Qвых n от заданных линейных ускорений аn=g⋅n, где n - значение перегрузки, определяют значения корректирующих коэффициентов Ккорр(n)=Qвых 1⋅n/Qвых n, где Qвых 1 - выходная информация при действии линейного ускорения a1=g, Qвых 1⋅n - значение выходной информации, которое должно было быть получено при условии линейности масштабного коэффициента; посредством внешнего компьютера выполняют аппроксимацию функции Ккорр(n), вводят в память микроконтроллера обратной связи акселерометра данные аппроксимирующего полинома, при эксплуатации акселерометра определяют микроконтроллером частичные отрезки полинома, к которым относятся измеренные акселерометром ускорения, определяют посредством микроконтроллера для измеренных ускорений корректирующие коэффициенты и выполняют корректировку микроконтроллером измеренной выходной информации путем ее умножения на соответствующие корректирующие коэффициенты
Предлагаемый способ содержит общие с прототипом операции и отличные.
Для выполнения предлагаемого способа, как и в прототипе:
1. Каждый изготовленный акселерометр устанавливают на центрифугу и задают ряд значений положительных и отрицательных линейных ускорений.
2. При каждом заданном ускорении измеряют выходную информацию.
В отличие от прототипа:
3. После измерения ряда значений зависимости выходной информации Qвыхn от заданных линейных ускорений an=g⋅n, где a1=1⋅g, n=1…N - последовательно возрастающие числа, не обязательно целые, определяющие возрастание задаваемой перегрузки, an=a1⋅N - диапазон измерения акселерометра, обеспечивают программным способом вычисление ряда корректирующих коэффициентов: Ккорр(n)=Qвых 1⋅n/Qвых n.
Корректирующий коэффициент Ккорр(n) представляет собой отношение значения выходной информации Qвых1⋅n, которое должно было быть на выходе акселерометра при задании перегрузки, возросшей в n раз по отношению к lg (n - не обязательно целое число), при условии отсутствия нелинейности выходной характеристики, к фактически полученному значению выходной информации Qвых n.
Соответствующий ряд значений корректирующего коэффициента Ккорр(n) представляет собой решетчатую функцию.
Значение Qвых 1⋅n вычисляют программным способом, для чего в компьютер на рабочем месте прошивают программу, в которую в качестве исходных данных вводят измеренное при действии lg значение выходной информации Qвых1 и ряд значений n перегрузок, которые будут заданы центрифугой.
2. Обеспечивают программным способом аппроксимацию отдельных участков полученной решетчатой функции Ккорр(n) непрерывной функцией вида:  Для каждого участка решетчатой функции Ккорр(n) подбирается своя непрерывная функция
Для каждого участка решетчатой функции Ккорр(n) подбирается своя непрерывная функция  , которая содержит все дискретные значения решетчатой функции этого участка. Обозначение а(n) означает, что линейное ускорение на каждом участке может принимать любые непрерывные значения, к которым принадлежат также дискретные значения линейных ускорений этого участка. Эту операцию также выполняют программным способом, для чего в компьютере на рабочем месте должна быть прошита программа, в которой в качестве исходных данных используются дискретные значения корректирующего коэффициента Ккорр(n), полученные при выполнении предыдущей операции.
, которая содержит все дискретные значения решетчатой функции этого участка. Обозначение а(n) означает, что линейное ускорение на каждом участке может принимать любые непрерывные значения, к которым принадлежат также дискретные значения линейных ускорений этого участка. Эту операцию также выполняют программным способом, для чего в компьютере на рабочем месте должна быть прошита программа, в которой в качестве исходных данных используются дискретные значения корректирующего коэффициента Ккорр(n), полученные при выполнении предыдущей операции.
3. Записывают в память процессора изготавливаемого акселерометра начальное и конечное значения функции Ккорр(n) на соответствующем участке, номер участка и коэффициенты μ0,1,2,3 функции  для этого участка; на этом завершаются операции способа компенсации нелинейности масштабного коэффициента акселерометра при изготовлении акселерометра на заводе-изготовителе.
для этого участка; на этом завершаются операции способа компенсации нелинейности масштабного коэффициента акселерометра при изготовлении акселерометра на заводе-изготовителе.
4. При эксплуатации акселерометра операции выполняются микроконтроллером, входящим в состав акселерометра. Когда по оси чувствительности акселерометра действует линейное ускорение, микроконтроллер, установленный в цепи обратной связи, реализующий по записанной в него программе измерение линейного ускорения с обеспечением определенных разностным уравнением динамических характеристик системы и формирование выходной информации, выполняет также операции в соответствии с программой компенсации нелинейности масштабного коэффициента, а именно: определение участка, к которому относится измеренное акселерометром линейное ускорение, вычисление процессором для измеренного линейного ускорения корректирующего коэффициента  корректировку измеренной выходной информации путем ее умножения на вычисленный корректирующий коэффициент.
корректировку измеренной выходной информации путем ее умножения на вычисленный корректирующий коэффициент.
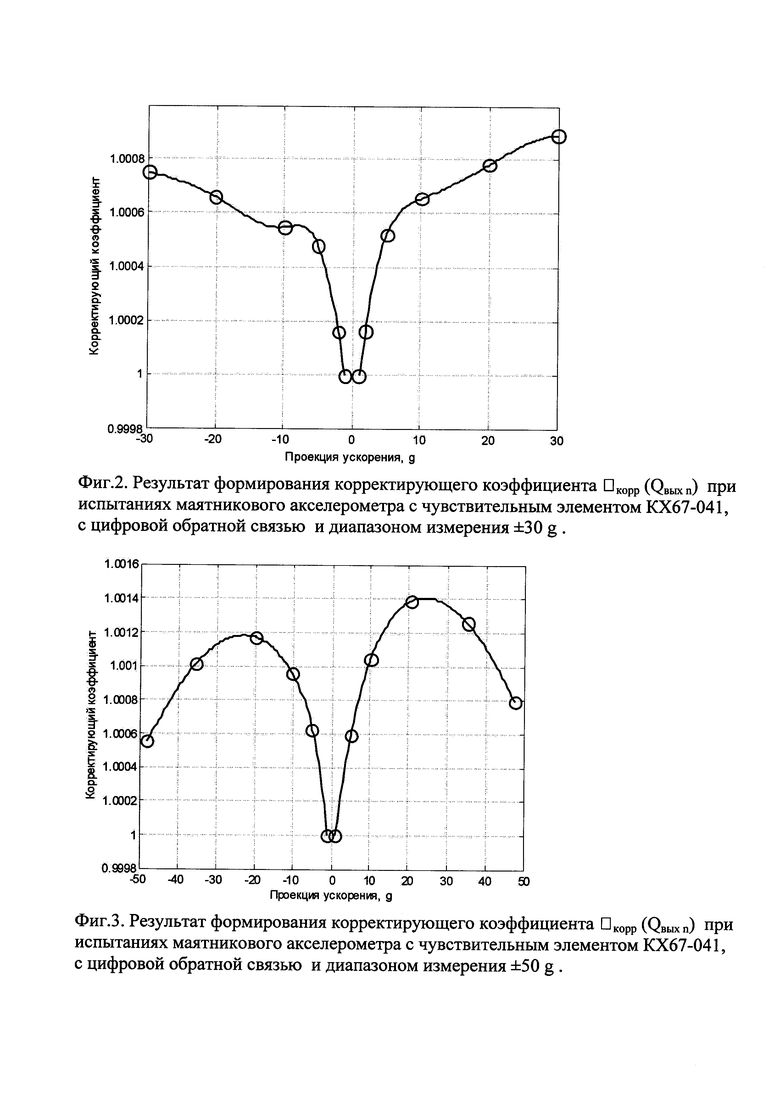
Предлагаемый способ проверен экспериментально на макете акселерометра, состоящего из чувствительного элемента акселерометра КХ67-041 и цифрового усилителя обратной связи с ШИМ.
В процессор прошита программа цифрового регулятора [3, 4], обеспечивающего диапазон измерения ±30 g. По предлагаемому способу определен корректирующий коэффициент и выполнена его аппроксимация функцией вида 
Результаты представлены на фиг. 2.
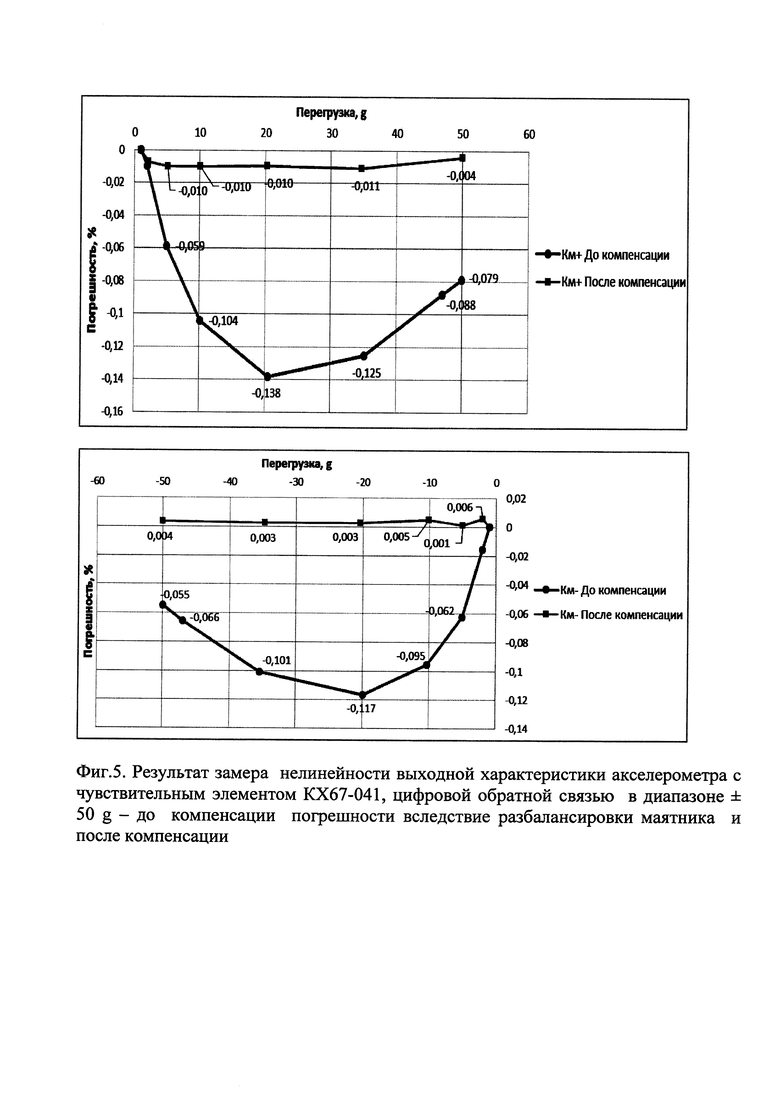
В следующем эксперименте в процессор акселерометра прошита программа цифрового регулятора, обеспечивающего диапазон измерения ±50 g. По предлагаемому способу определен корректирующий коэффициент и выполнена аналогичная аппроксимация. Результаты представлены на фиг. 3.
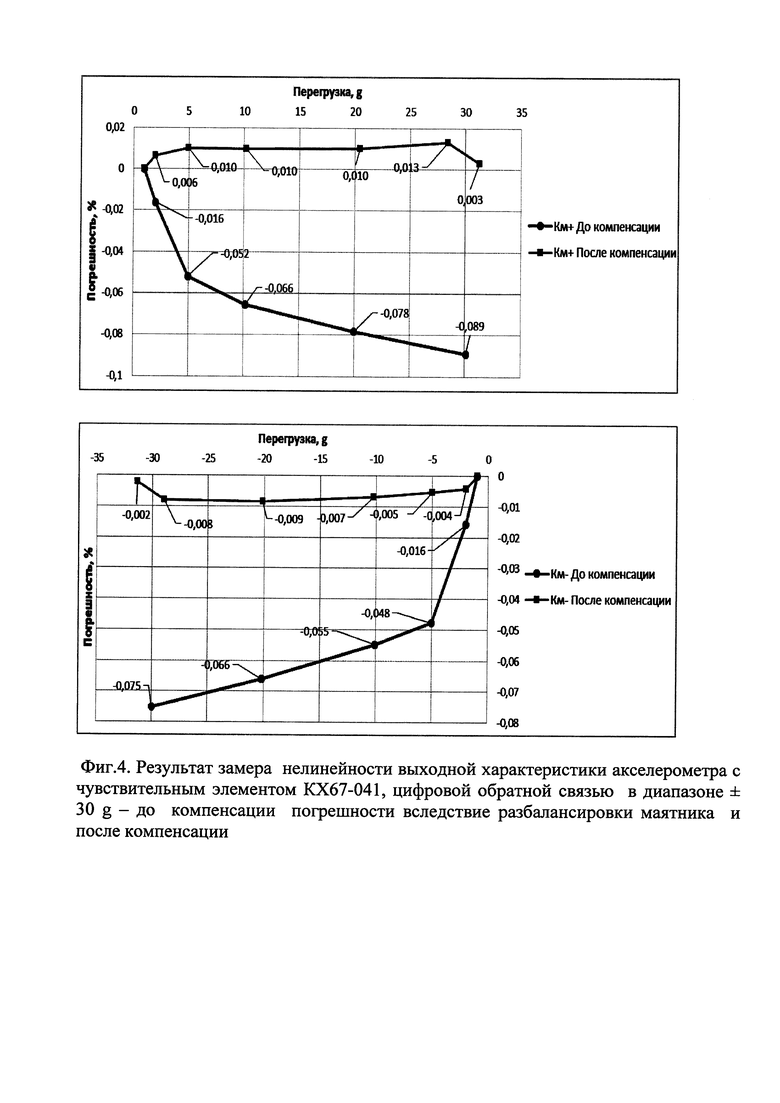
На фиг. 4 и фиг. 5 приведены результаты испытаний акселерометра. Для акселерометра с диапазоном измерения ±30 g до внесения корректировок по предлагаемому способу нелинейность масштабного коэффициента составляла ±0,08%. После компенсации нелинейность масштабного коэффициента не превышает ±0,01%. Для акселерометра с диапазоном измерения ±50 g до внесения корректировок по предлагаемому способу нелинейность масштабного коэффициента составляла -0,138%. После компенсации нелинейность масштабного коэффициента не превышает ±0,01%.
Таким образом, заявлен способ обеспечения линейности масштабного коэффициента широкодиапазонного маятникового акселерометра компенсационного типа, заключающийся в том, что в процессе наладки устанавливают акселерометр на центрифугу, задают последовательно ряд линейных ускорений в диапазоне измерения акселерометра, измеряют выходной сигнал акселерометра в зависимости от величины заданного линейного ускорения, корректируют параметры акселерометра, обеспечивая линейность зависимости выходного сигнала от заданного линейного ускорения. Отличительная особенность способа заключается в том, что после измерения последовательности значений зависимости выходной информации Qвых n от заданных линейных ускорений аn=g⋅n, где n - значение перегрузки, определяют значения корректирующих коэффициентов Ккорр(n)=Qвых 1⋅n/Qвых n, где Qвых1 - выходная информация при действии линейного ускорения a1=g, Qвых 1⋅n - значение выходной информации, которое должно было быть получено при условии линейности масштабного коэффициента; посредством внешнего компьютера выполняют аппроксимацию функции Ккорр(n), вводят в память микроконтроллера обратной связи акселерометра данные аппроксимирующего полинома, при эксплуатации акселерометра определяют микроконтроллером частичные отрезки полинома, к которым относятся измеренные акселерометром ускорения, определяют посредством микроконтроллера для измеренных ускорений корректирующие коэффициенты и выполняют корректировку микроконтроллером измеренной выходной информации путем ее умножения на соответствующие корректирующие коэффициенты.
Литература
1. Коновалов С.Ф. Теория виброустойчивости акселерометров. М.: Машиностроение, 1991.
2. Сео Дже Бом. Оптимизация параметров и моделирование рабочих режимов в компенсационных акселерометрах типа Q-flex и Si-flex. Автореферат диссертации. М., 2012, сайты www.dissers.ru и www.tekhnosfera.com.
3. Федоров С.М., Литвинов А.П. Автоматические системы с цифровыми управляющими машинами. М., Л.: Энергия, 1965.
4. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обеспечения линейности масштабного коэффициента в маятниковых компенсационных акселерометрах с магнитоэлектрическим датчиком момента | 2023 |
|
RU2808710C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЛИНЕЙНОСТИ МАСШТАБНОГО КОЭФФИЦИЕНТА МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА КОМПЕНСАЦИОННОГО ТИПА | 2016 |
|
RU2626071C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| Способ обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью и виброустойчивый маятниковый акселерометр | 2015 |
|
RU2615221C2 |
Способ обеспечения линейности масштабного коэффициента маятникового широкодиапазонного акселерометра компенсационного типа относится к измерительной технике и может быть использован в области производства приборов для измерения линейного ускорения. В процессе наладки устанавливают акселерометр на центрифугу, задают последовательно ряд линейных ускорений в диапазоне измерения акселерометра, измеряют выходной сигнал акселерометра в зависимости от величины заданного линейного ускорения, корректируют параметры системы, обеспечивая линейность зависимости выходного сигнала от заданного линейного ускорения. Согласно изобретению после измерения последовательности значений зависимости выходной информации Qвых n от заданных линейных ускорений an=g⋅n, где n - значение перегрузки, определяют значения корректирующих коэффициентов Ккорр(n)=Qвых 1⋅n/Qвых n, где Qвых 1 - выходная информация при действии линейного ускорения a1=g, Qвых 1⋅n - значение выходной информации, которое должно было быть получено при условии линейности масштабного коэффициента; посредством внешнего компьютера выполняют аппроксимацию функции Ккорр(n), вводят в память микроконтроллера обратной связи акселерометра данные аппроксимирующего полинома, при эксплуатации акселерометра определяют микроконтроллером частичные отрезки полинома, к которым относятся измеренные акселерометром ускорения, определяют посредством микроконтроллера для измеренных ускорений корректирующие коэффициенты и выполняют корректировку микроконтроллером измеренной выходной информации путем ее умножения на соответствующие корректирующие коэффициенты. Технический результат изобретения – обеспечение линейности масштабного коэффициента широкодиапазонного маятникового акселерометра компенсационного типа. 5 ил.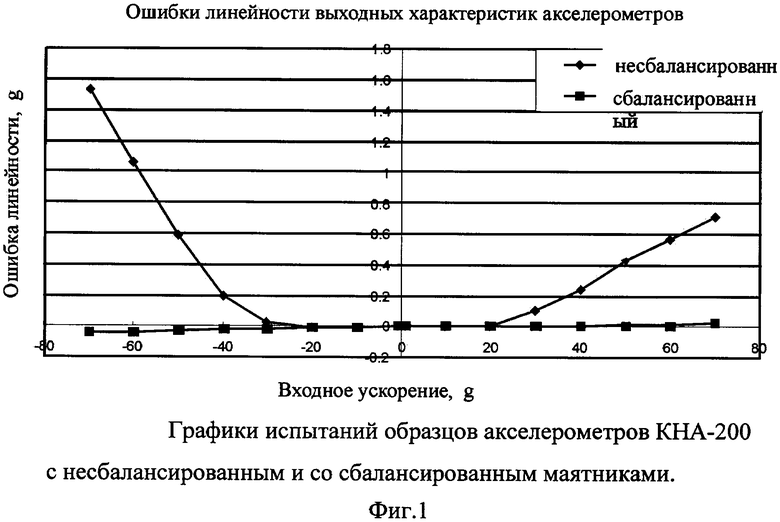
Способ обеспечения линейности масштабного коэффициента маятникового широкодиапазонного акселерометра компенсационного типа, заключающийся в том, что в процессе наладки устанавливают акселерометр на центрифугу, задают последовательно ряд линейных ускорений в диапазоне измерения акселерометра, измеряют выходной сигнал акселерометра в зависимости от величины заданного линейного ускорения, корректируют параметры акселерометра, обеспечивая линейность зависимости выходного сигнала от заданного линейного ускорения, отличающийся тем, что после измерения последовательности значений зависимости выходной информации Qвых n от заданных линейных ускорений an=g⋅n, где n - значение перегрузки, определяют значения корректирующих коэффициентов Ккорр(n)=Qвых 1⋅n/Qвых n, где Qвых 1 - выходная информация при действии линейного ускорения a1=g, Qвых 1⋅n - значение выходной информации, которое должно было быть получено при условии линейности масштабного коэффициента; посредством внешнего компьютера выполняют аппроксимацию функции Ккорр(n), вводят в память микроконтроллера обратной связи акселерометра данные аппроксимирующего полинома, при эксплуатации акселерометра определяют микроконтроллером частичные отрезки полинома, к которым относятся измеренные акселерометром ускорения, определяют посредством микроконтроллера для измеренных ускорений корректирующие коэффициенты и выполняют корректировку микроконтроллером измеренной выходной информации путем ее умножения на соответствующие корректирующие коэффициенты.
| Сео Дже Бом | |||
| Оптимизация параметров и моделирование рабочих режимов в компенсационных акселерометрах типа Q-flex и Si-flex | |||
| Автореферат диссертации | |||
| М., 2012 | |||
| RU 97102471 A, 10.03.1999 | |||
| WO 1996010185 A1, 04.04.1996 | |||
| US 4932261 A1, 12.06.1990 | |||
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |

