Изобретение относится к области систем автоматического управления, в частности, к технике формирования управляющих сигналов.
Наиболее близким к описываемому изобретению по технической сущности и достигаемому эффекту является способ автоматического управления в системе с люфтом и следящая система для его осуществления [1], заключающийся в том, что при суммировании сигнала ошибки с импульсным сигналом коррекции, который формируют в момент наличия люфта путем вычитания текущего значения люфта из сигнала, равного значению полузоны люфта и имеющего знак, совпадающий со знаком сигнала ошибки, сигнал, равный значению полузоны люфта и имеющий знак, совпадающий со знаком сигнала ошибки, формируют путем непрерывного запоминания предыдущей максимальной величины текущего значения люфта.
Недостатками данного способа являются узкая направленность способа на коррекцию нелинейностей только типа «люфт», возможность реализации лишь в системах с заранее известными параметрами люфта, сложность априорного выбора величины коэффициента пропорционального звена регулятора, неэффективность компенсации люфта с изменяющимися параметрами.
Технический результат данного изобретения - повышение точности компенсации нелинейностей, улучшение динамических характеристик следящей системы, содержащей нелинейность с изменяющимися параметрами.
Технический результат достигается тем, что задающий сигнал суммируется с сигналом коррекции, сформированным путем преобразования сигнала, равного полученному с запаздыванием модулю суммы сигнала ошибки и сигнала коррекции, в сигнал с той же амплитудой, но имеющий знак задающего сигнала (при компенсации зоны нечувствительности) или его производной (при компенсации люфта), что позволяет повысить точность и улучшить динамические характеристики следящей системы.
Предлагаемый способ реализуется в следящей системе с люфтом и следящей системе с зоной нечувствительности.
Следящая система с люфтом содержит измеритель рассогласования задающего и выходного сигналов, суммирующий вход которого соединен с суммирующим входом первого сумматора, последовательно соединенного с нелинейным звеном типа «люфт» и объектом управления с датчиком выходного сигнала, выход которого соединен с вычитающим входом измерителя рассогласования, второй сумматор, первый суммирующий вход которого соединен с выходом измерителя рассогласования, а второй - со вторым суммирующим входом первого сумматора. В следящую систему с люфтом дополнительно введен блок вычисления модуля, вход которого соединен с выходом второго сумматора, блок запаздывания, вход которого соединен с выходом блока вычисления модуля, блок умножения сигналов, первый вход которого соединен с выходом блока запаздывания, а выход - со вторым суммирующим входом первого сумматора и вторым суммирующим входом второго сумматора, блок определения знака сигнала, выход которого соединен со вторым входом блока умножения сигналов, блок дифференцирования, вход которого соединен с суммирующим входом измерителя рассогласования, а выход - со входом блока определения знака сигнала.
Следящая система с зоной нечувствительности содержит измеритель рассогласования задающего и выходного сигналов, суммирующий вход которого соединен с суммирующим входом первого сумматора, последовательно соединенного с нелинейным звеном типа «зона нечувствительности» и объектом управления с датчиком выходного сигнала, выход которого соединен с вычитающим входом измерителя рассогласования, второй сумматор, первый суммирующий вход которого соединен с выходом измерителя рассогласования, а второй - со вторым суммирующим входом первого сумматора. В следящую систему с зоной нечувствительности дополнительно введен блок вычисления модуля, вход которого соединен с выходом второго сумматора, блок запаздывания, вход которого соединен с выходом блока вычисления модуля, блок умножения сигналов, первый вход которого соединен с выходом блока запаздывания, а выход - со вторым суммирующим входом первого сумматора и вторым суммирующим входом второго сумматора, блок определения знака сигнала, вход которого соединен с суммирующим входом измерителя рассогласования, а выход - со вторым входом блока умножения сигналов.
Таким образом, предложенный способ отвечает критериям изобретения «новизна» и «положительный эффект».
На фиг.1 представлена структурная схема следящей системы, реализующей способ упреждающей коррекции нелинейности в системе с люфтом;
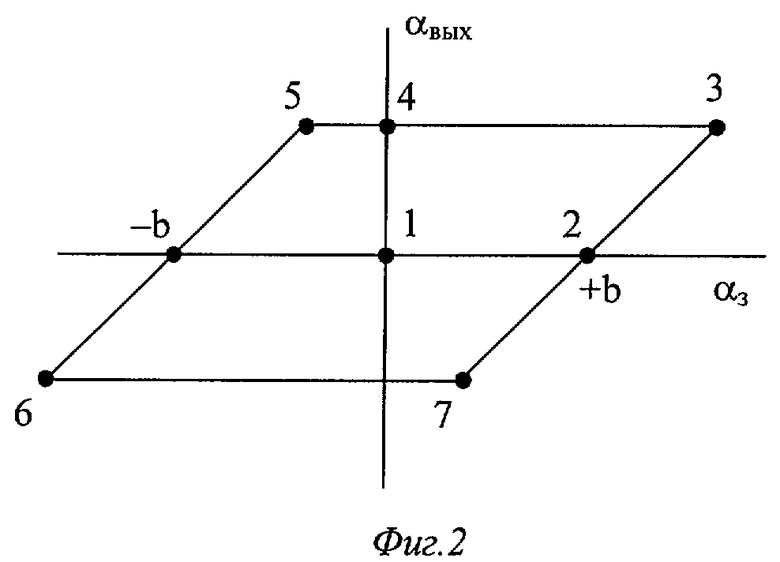
на фиг.2 - характеристика нелинейного звена типа «люфт»;
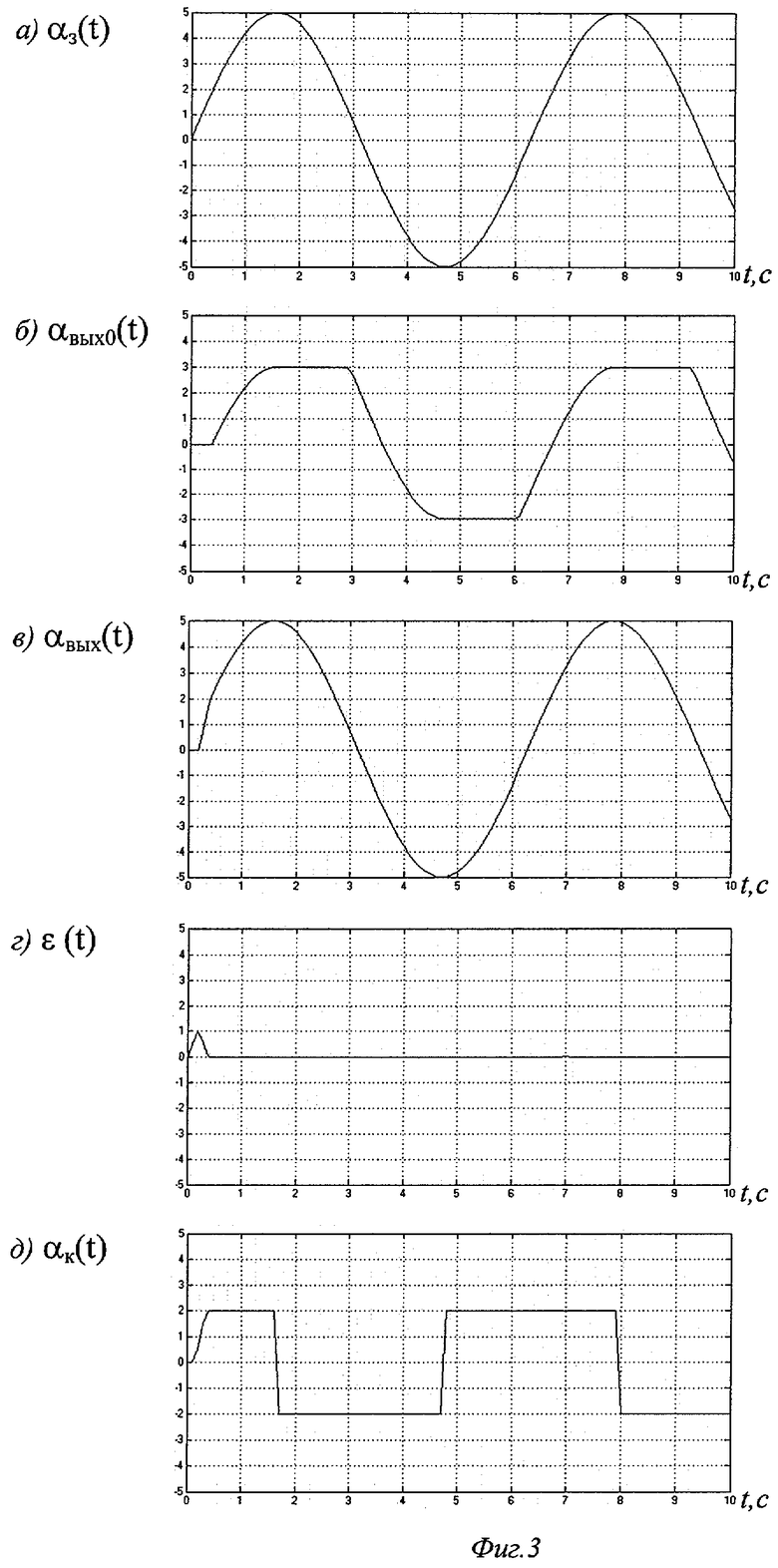
на фиг.3 приведены временные диаграммы работы следящей системы с люфтом, где:
а - диаграмма кривой задающего воздействия α3(t);
б - диаграмма кривой выходного сигнала при отсутствии коррекции αвых0(t);
в - диаграмма кривой выходного сигнала при предупреждении нелинейности предложенным способом αвых(t);
г - диаграмма кривой сигнала ошибки при предупреждении нелинейности предложенным способом ε(t);
д - диаграмма кривой сигнала коррекции αк(t).
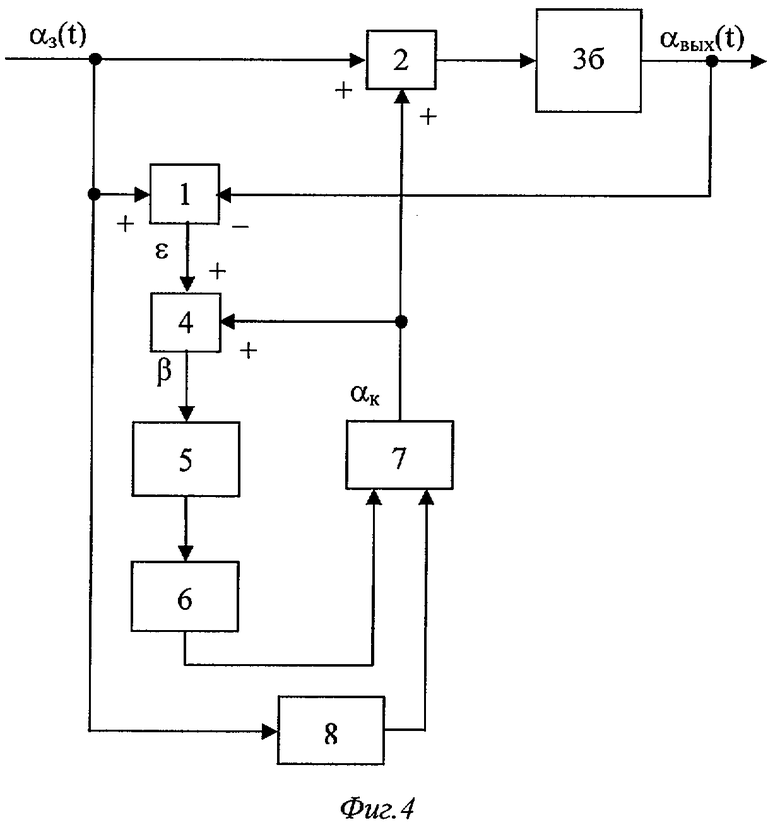
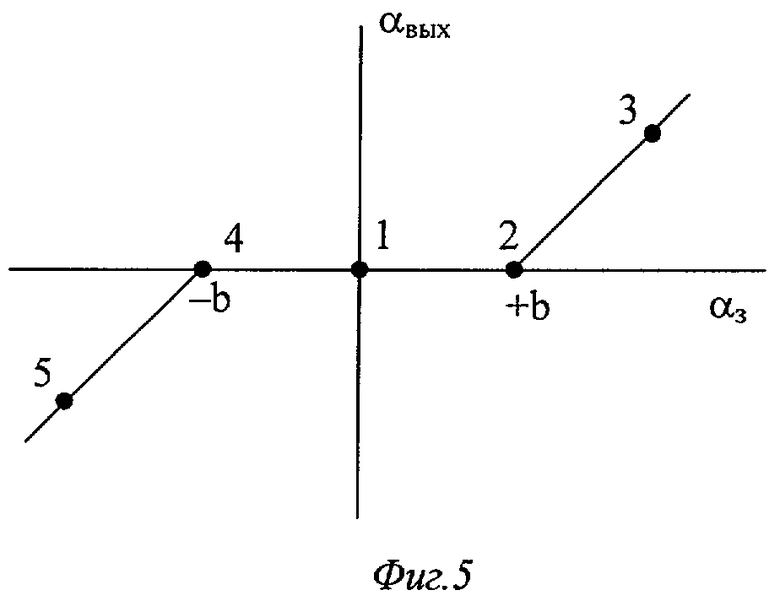
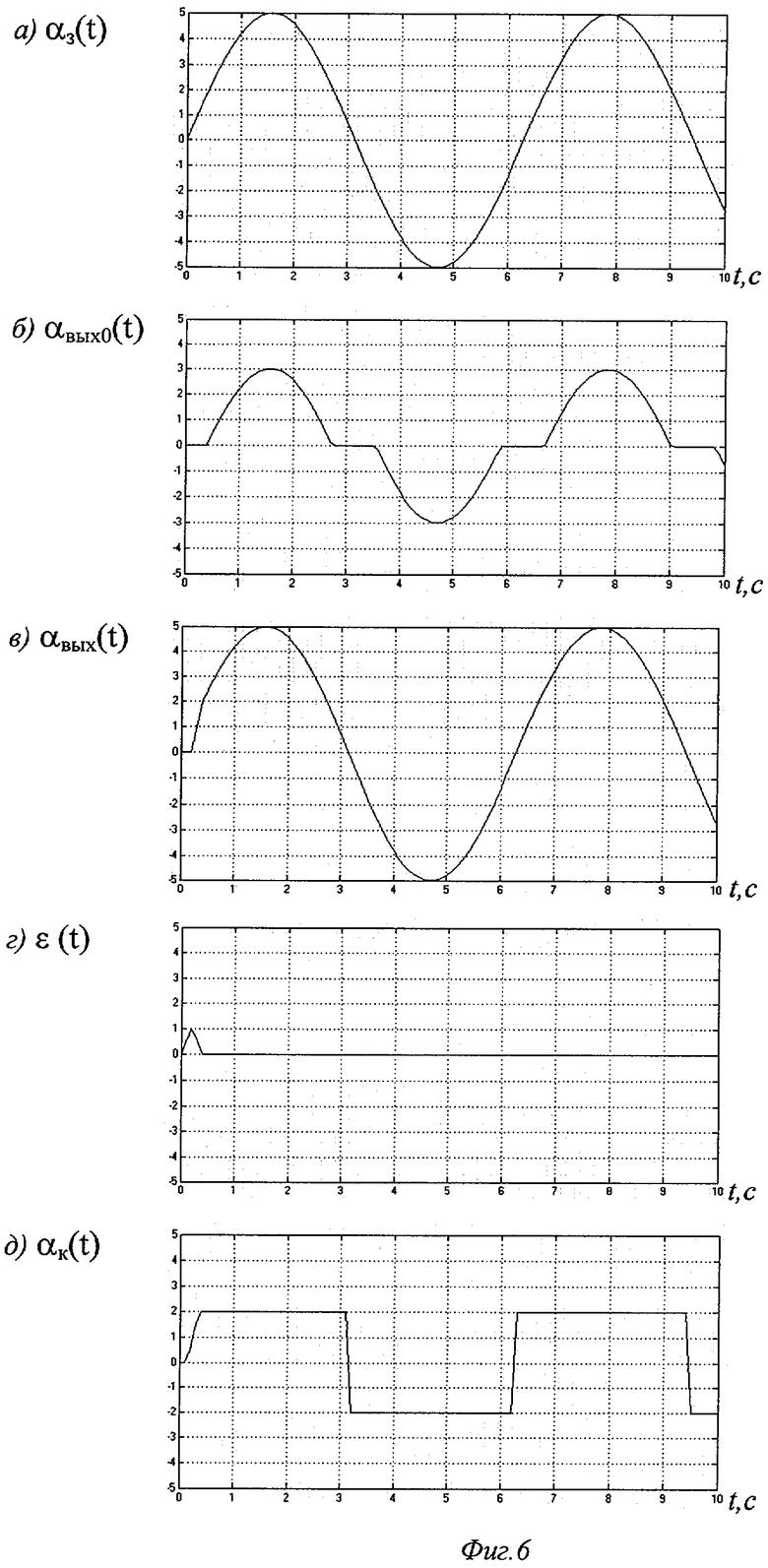
На фиг.4 представлена структурная схема следящей системы, реализующей способ упреждающей коррекции нелинейности в системе с зоной нечувствительности; на фиг.5 - характеристика нелинейного звена типа «зона нечувствительности»; на фиг.6 приведены временные диаграммы работы следящей системы зоной нечувствительности, где:
а - диаграмма кривой задающего воздействия α3(t);
б - диаграмма кривой выходного сигнала при отсутствии коррекции αвых0(t);
в - диаграмма кривой выходного сигнала при предупреждении нелинейности предложенным способом αвых(t);
г - диаграмма кривой сигнала ошибки при предупреждении нелинейности предложенным способом ε(t);
д - диаграмма кривой сигнала коррекции αк(t).
Блок определения знака сигнала работает по следующему алгоритму: если входной сигнал блока положителен, то выходной сигнал будет равен 1; если входной сигнал отрицателен, то выходной сигнал будет равен -; если входной сигнал равен 0, то выходной сигнал также будет равен 0.
Блок умножения сигналов выполняет вычисление произведения текущих значений сигналов.
Блок вычисления модуля вычисляет абсолютное значение величины сигнала.
Блок транспортного запаздывания выполняет задержку входного сигнала на один временной такт.
Следящая система с люфтом (фиг.1) содержит измеритель рассогласования 1 задающего и выходного сигналов, суммирующий вход которого соединен с суммирующим входом первого сумматора 2, последовательно соединенного с нелинейным звеном типа «люфт» и объектом управления За с датчиком выходного сигнала, выход которого соединен с вычитающим входом измерителя рассогласования 1, второй сумматор 4, первый суммирующий вход которого соединен с выходом измерителя рассогласования 1, а второй - со вторым суммирующим входом первого сумматора 2, блок вычисления модуля 5, вход которого соединен с выходом второго сумматора 4, блок запаздывания 6, вход которого соединен с выходом блока вычисления модуля 5, блок умножения сигналов 7, первый вход которого соединен с выходом блока запаздывания 6, а выход - со вторым суммирующим входом первого сумматора 2 и вторым суммирующим входом второго сумматора 4, блок определения знака сигнала 8, выход которого соединен со вторым входом блока умножения сигналов 7, блок дифференцирования 9, вход которого соединен с суммирующим входом измерителя рассогласования 1, а выход - со входом блока определения знака сигнала 8.
Следящая система с зоной нечувствительности (фиг.4) содержит измеритель рассогласования 1 задающего и выходного сигналов, суммирующий вход которого соединен с суммирующим входом первого сумматора 2, последовательно соединенного с нелинейным звеном типа «зона нечувствительности» и объектом управления 3б с датчиком выходного сигнала, выход которого соединен с вычитающим входом измерителя рассогласования 1, второй сумматор 4, первый суммирующий вход которого соединен с выходом измерителя рассогласования 1, а второй - со вторым суммирующим входом первого сумматора 2, блок вычисления модуля 5, вход которого соединен с выходом второго сумматора 4, блок запаздывания 6, вход которого соединен с выходом блока вычисления модуля 5, блок умножения сигналов 7, первый вход которого соединен с выходом блока запаздывания 6, а выход - со вторым суммирующим входом первого сумматора 2 и вторым суммирующим входом второго сумматора 4, блок определения знака сигнала 8, вход которого соединен с суммирующим входом измерителя рассогласования 1, а выход - со вторым входом блока умножения сигналов 7.
В примерах структурных схем следящей системы блок определения знака сигнала реализован при помощи релейного элемента, у которого величина выходного сигнала во включенном состоянии равна 1, а выключенном состоянии равна -1. Пороги включения и выключения релейного элемента равны 0.
По предложенному способу в случае появления в системе нелинейности ее компенсация будет произведена следующим образом.
Пусть начальное состояние следящей системы с люфтом (фиг.1) характеризуется точкой 1 (фиг.2) при t=t1, αз(t1)=0, αк(t1)=0. При разомкнутом люфте и увеличении сигнала задающего воздействия α3 (при движении системы «вверх» от точки 1 до точки 2 на интервале времени t1-t2) на выходе измерителя рассогласования 1 возникает ошибка ε=αз- αвых (фиг.2 и 3). Эта ошибка поступает на второй сумматор 4, на выходе которого формируется сигнал β=ε+αк. Затем этот сигнал β поступает последовательно в блок вычисления модуля 5 и блок запаздывания 6. Через время τ, т.е. при t=t1+τ, где τ - время задержки сигнала в блоке запаздывания 6, сигнал β поступает на один из входов блока умножения 7. На другой вход этого блока подается знак продифференцированного задающего сигнала (1, если сигнал положителен, или -1, если он отрицателен). В блоке умножения 7 осуществляется формирование компенсирующего сигнала  который поступает на первый сумматор 2, где складывается с задающим сигналом. Сформированный таким образом сигнал поступает на объект управления, содержащий нелинейное звено типа «люфт», в результате чего происходит компенсация ошибки, возникшей на предыдущем шаге коррекции. Таким образом, при условии постоянства параметров люфта через определенное число итераций на первый вход блока умножения сигналов 7 начинает поступать величина, равная полузоне люфта b (β=b), а ошибка ε становится равной нулю. Если параметры люфта начинают изменяться, то осуществляется автоматическая подстройка и вновь возникшая ошибка компенсируется. Коррекция системы происходит еще до момента времени, соответствующего точке 3 на фиг.2, когда сигнал задающего воздействия αз достигает максимального значения. При уменьшении сигнала задающего воздействия αз (благодаря анализу текущего значения производной задающего воздействия) происходит мгновенная смена знака сигнала коррекции (фиг.3), что позволяет эффективно компенсировать люфт объекта управления.
который поступает на первый сумматор 2, где складывается с задающим сигналом. Сформированный таким образом сигнал поступает на объект управления, содержащий нелинейное звено типа «люфт», в результате чего происходит компенсация ошибки, возникшей на предыдущем шаге коррекции. Таким образом, при условии постоянства параметров люфта через определенное число итераций на первый вход блока умножения сигналов 7 начинает поступать величина, равная полузоне люфта b (β=b), а ошибка ε становится равной нулю. Если параметры люфта начинают изменяться, то осуществляется автоматическая подстройка и вновь возникшая ошибка компенсируется. Коррекция системы происходит еще до момента времени, соответствующего точке 3 на фиг.2, когда сигнал задающего воздействия αз достигает максимального значения. При уменьшении сигнала задающего воздействия αз (благодаря анализу текущего значения производной задающего воздействия) происходит мгновенная смена знака сигнала коррекции (фиг.3), что позволяет эффективно компенсировать люфт объекта управления.
Рассмотрим процесс компенсации нелинейности в следящей системе с зоной нечувствительности (фиг.4). Пусть начальное состояние следящей системы характеризуется точкой 1 (фиг.5) при t=t1, αз(t1)=0, αк(t1)=0. При разомкнутом люфте и увеличении сигнала задающего воздействия αз (при движении системы «вверх» от точки 1 до точки 2 на интервале времени t1-t2) на выходе измерителя рассогласования 1 возникает ошибка ε=αз-αвых (фиг.5 и 6). Эта ошибка поступает на второй сумматор 4, на выходе которого формируется сигнал β=ε+αк. Затем этот сигнал β поступает последовательно в блок вычисления модуля 5 и блок запаздывания 6. Через время τ, т.е. при t=t1+τ, где τ - время задержки сигнала в блоке запаздывания 6, сигнал β поступает на один из входов блока умножения 7. На другой вход этого блока подается знак задающего сигнала (1, если сигнал положителен, или -1, если он отрицателен). В блоке умножения 7 осуществляется формирование компенсирующего сигнала  который поступает на первый сумматор 2, где складывается с задающим сигналом. Сформированный таким образом сигнал поступает на объект управления 3б, содержащий нелинейное звено типа «зона нечувствительности», в результате чего происходит компенсация ошибки, возникшей на предыдущем шаге коррекции. Таким образом, при условии постоянства параметров зоны нечувствительности через определенное число итераций на первый вход блока умножения сигналов 7 начинает поступать величина, равная половине ширины зоны нечувствительности b(β=b), а ошибка ε становится равной нулю. Если параметры зоны нечувствительности начинают изменяться, то осуществляется автоматическая подстройка и вновь возникшая ошибка компенсируется. Коррекция системы происходит еще до момента времени, соответствующего точке 3 на фиг.6, когда сигнал задающего воздействия αз достигает максимального значения. При смене знака сигнала задающего воздействия α3 (при переходе через точку 1 на фиг.6) благодаря анализу текущего значения задающего воздействия происходит мгновенная смена знака сигнала коррекции (фиг.6), что позволяет эффективно компенсировать зону нечувствительности объекта управления.
который поступает на первый сумматор 2, где складывается с задающим сигналом. Сформированный таким образом сигнал поступает на объект управления 3б, содержащий нелинейное звено типа «зона нечувствительности», в результате чего происходит компенсация ошибки, возникшей на предыдущем шаге коррекции. Таким образом, при условии постоянства параметров зоны нечувствительности через определенное число итераций на первый вход блока умножения сигналов 7 начинает поступать величина, равная половине ширины зоны нечувствительности b(β=b), а ошибка ε становится равной нулю. Если параметры зоны нечувствительности начинают изменяться, то осуществляется автоматическая подстройка и вновь возникшая ошибка компенсируется. Коррекция системы происходит еще до момента времени, соответствующего точке 3 на фиг.6, когда сигнал задающего воздействия αз достигает максимального значения. При смене знака сигнала задающего воздействия α3 (при переходе через точку 1 на фиг.6) благодаря анализу текущего значения задающего воздействия происходит мгновенная смена знака сигнала коррекции (фиг.6), что позволяет эффективно компенсировать зону нечувствительности объекта управления.
Поведение скорректированных нелинейных следящих систем с люфтом или зоной нечувствительности по предложенному способу полностью совпадает с поведением линейных систем (без люфта или зоны нечувствительности), если пренебречь неточностью установки величины ограничения релейного элемента.
Время настройки, в течение которого происходит определение следящей системой требуемого значения сигнала коррекции, определяется следующим образом.
1. Находится наименьшее целое число n, являющееся решением неравенства (I):

где b - половина ширина зоны нечувствительности (люфта);
f(t) - функция времени, описывающая поведение входного сигнала;
n - число итераций, необходимых для определения величины управляющего сигнала, требующегося для предупреждения нелинейности;
τ - время задержки сигнала в блоке запаздывания.
В случае, если найденное решение не удовлетворяет равенству (1), следует прибавить к нему единицу.
2. Вычисляется время настройки компенсатора по формуле (2):

Достоинством предлагаемого способа являются простота реализации, плавность и быстрота настройки компенсатора на параметры нелинейности, что позволяет использовать данный способ не только для коррекции систем, обладающих нелинейностью данных типов вследствие износа механизмов или особенности конструкции, но и рекомендовать его внедрение на стадии проектирования изделий, содержащих узлы, подверженные риску возникновения нелинейности в процессе эксплуатации, с целью увеличения срока службы и эффективности работы таких изделий.
Источник информации
1. Авторское свидетельство № 2114455, кл. G 05 В 11/01, 5/01. // Сухинин Б.В., Нечепуренко Ю.Г., Ловчаков В.И., Сурков В.В. Способ автоматического управления в системе с люфтом и следящая система для его осуществления. Заявлено 18.02.97, (21) 97102401/09, опубл. 27.06.98.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2296355C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| Нелинейное корректирующее устройство | 1982 |
|
SU1023275A1 |
| Следящая система | 1980 |
|
SU883861A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| Следящая система | 1987 |
|
SU1464138A1 |
Изобретение относится к области систем автоматического управления, в частности, к технике формирования управляющих сигналов. Техническим результатом является повышение точности компенсации нелинейностей, улучшение динамических характеристик следящей системы, содержащей нелинейность с изменяющимися параметрами. Способ автоматического управления заключается в суммировании задающего сигнала с сигналом коррекции, причем модуль сигнала коррекции равен полученной с запаздыванием сумме ошибки и корректирующего воздействия, а знак совпадает со знаком задающего сигнала (при предупреждении зоны нечувствительности) или его производной (при предупреждении люфта). Следящая система содержит измеритель рассогласования задающего и выходного сигналов, сумматоры, блок запаздывания, блок умножения сигналов, нелинейное звено типа "люфт" или "зона нечувствительности", объект управления с датчиком выходного сигнала, блок определения знака, блок дифференцирования (только в системе с люфтом). 3 н.п. ф-лы, 6 ил.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Способ компенсации люфта в механической передаче | 1974 |
|
SU531127A1 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| US 3560830 A, 02.02.1971. | |||

