Изобретение относится к области геофизики, в частности к способам и устройствам определения ускорения силы тяжести (УСТ) на движущемся объекте, и может быть использовано для выполнения морской гравиметрической съемки.
Известен способ определения УСТ на движущемся объекте, включающий измерения УСТ гравиметром, неподвижно установленном на объекте-носителе, определение широты места, пути и абсолютной скорости объекта навигационным средством, вычисление по полученным данным поправки за эффект Этвеша [1].
Также известен способ определения УСТ в море, включающей измерение УСТ гравиметром, неподвижно установленным на подвижном основании, определение широты места, пути объекта и абсолютен скорости гравиметра навигационным средством, вычисление по полученным данным поправки на эффект Этвеша и искомого УСТ [2].
Известное устройство для осуществления способа [1] содержит функционально соединенные и расположенные на стабилизированной в горизонте платформе чувствительную систему, блок управления, навигационное средство, вычислитель и регистратор.
Недостаток известных способов и устройства заключаются в том, что они имеют недостаточно высокую точность определения УСТ на движущемся объекте при выполнении морской гравиметрической съемки. Это объясняется тем, что при их использовании имеют место существенная погрешность  определения поправки на эффект Этвеша и существенная погрешность
определения поправки на эффект Этвеша и существенная погрешность  определения УСТ на движущемся объекте, обусловленная искажением гравитационного поля, которое возникает за счет значительной (от 3 до 6 мин) постоянной времени низкочастотного фильтра гравиметра, и скоростью изменения гравитационного поля, в котором движется объект. Погрешность
определения УСТ на движущемся объекте, обусловленная искажением гравитационного поля, которое возникает за счет значительной (от 3 до 6 мин) постоянной времени низкочастотного фильтра гравиметра, и скоростью изменения гравитационного поля, в котором движется объект. Погрешность  возникает при использовании известных способов и устройства из-за того, что поправку на эффект Этвеша вычисляют по формуле [1]:
возникает при использовании известных способов и устройства из-за того, что поправку на эффект Этвеша вычисляют по формуле [1]:

если Земля представлена в виде шара, или по формуле:

если Земля представляется в виде эллипсоида, где в формулах (1) и (2):
ϕ - широта места объекта,
α - путевой угол объекта,
R - радиус Земли,
α, е - большая полуось и эксцентриситет земного эллипсоида,
ω - угловая скорость вращения Земли,
VН - абсолютная скорость движения объекта-носителя гравиметра (абсолютная скорость движения чувствительной системы гравиметра).
VN, VE - соответственно, северная и восточная составляющие VH.
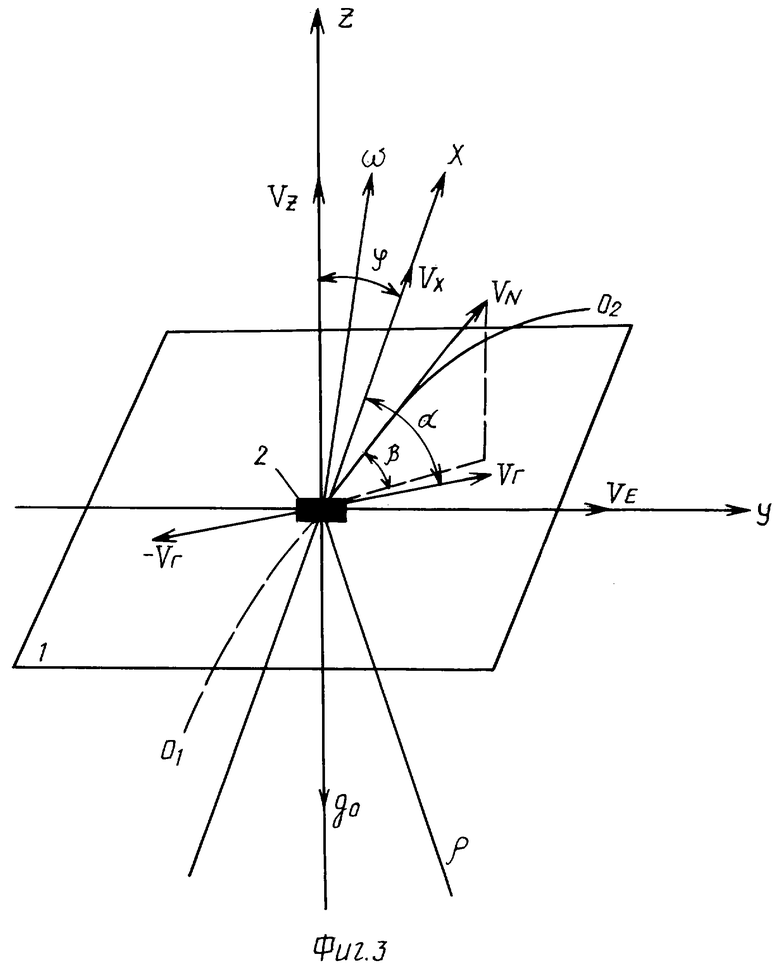
При определении УСТ в море на движущемся объекте траектория чувствительной системы гравиметра ρ, как правило (в большинстве случаев), не совпадает с поверхностью моря или земного эллипсоида, так как поверхность моря или океана изменяется как во времени, так и в пространстве под воздействием тектонических, гидрометеорологических и других факторов. В результате этого радиус кривизны траектории движения гравиметра может принимать значения от А до ∞ и от -∞ до - А, а угол β между вектором абсолютной скорости гравиметра и плоскостью горизонта может принимать значения от 0 до β.
Погрешность поправки отвеса MΔgβ из-за неучета угла β можно вычислить по формуле:

Например, когда β=5° и ΔgЭТ=100 мГл, то погрешность MΔgβ может достигать 8,7 мГл.
Погрешность поправки Этвеша MΔgβ, обусловленную использованием в формулах (1) и (2) вместо радиуса кривизны траектории движения объекта ρ радиуса Земли или большую полуось и эксцентриситет земного эллипсоида, оценивают по формуле:
Например, когда VH=9 м/с, ρ=106 м, при R=6378155 м погрешность составляет 6,8 мГл. При этом необходимо учесть, что принятое для расчета погрешности значение ρ не является экстремальным для существующей динамики объекта носителя, движущегося по морской поверхности или удерживающего постоянную глубину погружения при съемке.
Так преобладающий период колебаний подводного объекта составляет 30-120 с, а амплитуда вертикальных перемещений 2...3 м (Попов Е.И. Определение силы тяжести на подвижном основании. М.: Наука, 1967, с.178).
Отсюда следует, что значение ρ может достигать 3 км, что не учитывается в настоящее время при вычислении поправки Этвеша.
Погрешность М искажения гравиметрического поля, обусловленная наличием постоянной времени гравиметра и скорости движения носителя можно оценить следующим образом. Известно (Аппаратура и методы экспериментальных исследований по гравиметрии. М.: Наука, 1965, с.103), что погрешность  растет с увеличением постоянной времени гравиметра и скорости изменения гравитационного поля, в котором движется объект - носитель гравиметра, и ее можно вычислить по формуле
растет с увеличением постоянной времени гравиметра и скорости изменения гравитационного поля, в котором движется объект - носитель гравиметра, и ее можно вычислить по формуле

где α - скорость изменения гравитационного поля, в котором движется объект-носитель гравиметра,
VН - абсолютная скорость объекта-носителя гравиметра,
Т - постоянная времени низкочастотного фильтра гравиметра.
Например, когда α=0,8 мГл (средняя скорость изменения в средних широтах по меридиану УСТ (см. там же), VН=9,25 м/с (допустимая скорость движения объекта-носителя аппаратуры при проведении гравиметрической съемки в океане (Единые технические требования по Мировой гравиметрической съемке. Часть IУ. Инструкция по морской гравиметрической съемке (ИГ-78). Л.: изд. ГУНиО МО СССР, 1979, с.6, 7), Т=3 мин или Т=6 мин - значения постоянной времени у современных гравиметров [1], то погрешность  составит 1,3 мГл или 2,6 мГл соответственно.
составит 1,3 мГл или 2,6 мГл соответственно.
Однако допустимая погрешность определения УСТ в океане в соответствии с действующими нормативными документами по гравиметрической съемке (Единые технические требования по Мировой гравиметрической съемке. Часть ТУ. Инструкция по морской гравиметрической съемке (ИГ-78). Л.: изд. ГУНиОМО CCCP, 1979, с.6, 7) не должна превышать 1 мГл. Кроме того, для определения абсолютного значения УСТ необходимо использование опорных гравиметрических пунктов (ОГП), что значительно уменьшает эффективность съемки в связи с необходимостью периодического перемещения объекта-носителя в район ОГП.
Известен также способ определения силы тяжести на морском опорном пункте [3], включающий измерения силы тяжести морскими набортными гравиметрами на опорном пункте при прохождении его судном, движущимся последовательно по нескольким прямолинейным галсам, проложенным через опорный пункт, в котором для повышения точности определения силы тяжести, измерения производят гравиметрами на прямых и обратных курсах по n - парам галсов с углом смещения 40-50 градусов в пределах опорной зоны с радиусом R+mоп/2G, где mоп - погрешность значения силы тяжести на опорном пункте, G - градиент силы тяжести в пределах опорной зоны, вычисляют опорное значение силы тяжести для гравиметров как среднеарифметическое из значений по n-парным прохождениям в точках, максимально приближенных к опорному пункту. Ввиду того что - измерения производят двумя противоположными ориентированными гравиметрами, а опорное значение силы тяжести и осредненный нуль-пункт вычисляют для каждой пары приборов, можно повысить точность определения силы тяжести. Однако технический результат достигается только в пределах рабочей зоны в точках, максимально приближенных к опорному пункту.
Задачей заявляемого технического решения является повышение точности определения УСТ на движущемся объекте и повышение эффективности съемки за счет определения абсолютного значения УСТ без использования ОГП.
Поставленная цель достигается тем, что в способе определения УСТ на движущемся объекте, включающем измерение ускорения (α0) неподвижным относительно объекта гравиметром (акселерометром по вертикали), определение широты места ϕ, путевого угла α, абсолютной скорости VH чувствительной системы гравиметра навигационным средством и вычисление по полученным данным искомого абсолютного значения УСТ (g0), дополнительно определяют угол β между вектором абсолютной скорости чувствительной системы гравиметра и плоскостью горизонта, радиус кривизны ρ траектории движения чувствительной системы, а искомое абсолютное значение УСТ вычисляют по формуле:

где ω - угловая скорость вращения Земли,
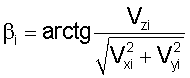
дополнительно измеряют вертикальную Vzi и горизонтальные составляющие Vαi, Vyi вектора абсолютной скорости чувствительной системы гравиметра в моменты времени ti и t(i+1) в точках траектории движения чувствительной системы, а значения β и ρ вычисляют по формулам
а устройство, содержащее функционально соединенные и расположенные на стабилизированной в плоскости горизонта платформе чувствительную систему гравиметра, блок управления, навигационное средство, вычислитель и регистратор, дополнительно снабжено блоком для определения угла 3 между вектором абсолютной скорости чувствительной системы гравиметра и плоскостью горизонта, а также радиуса кривизны ρ траектории движения чувствительной системы гравиметра, вход которого соединен с выходом блока управления и подключен к выходу навигационного средства, а выход подключен к входу вычислителя, реализующего формульную зависимость:

а блок для определения β и ρ содержит трехкомпонентный измеритель абсолютной скорости чувствительной системы гравиметра, реализующей формульные зависимости;
при этом выходы трехкомпонентного измерителя абсолютной скорости чувствительной системы и измерителя времени подключены к входу вычислителя.
Сущность заявляемого технического решения поясняется чертежами.
Фиг.1. Структурная схема устройства для осуществления заявляемого способа. Устройство содержит расположенную на стабилизированной в плоскости горизонта платформе 1 чувствительную систему 2, выход которой соединен через блок управления 3 с входом вычислителя 4, навигационное средство 5, в качестве которого можно использовать современный инерциальный навигационный комплекс (ИНС) геометрического типа (Elton О.Е., Moore J.P. Marine ESG. Navigation as a Capability for the Present Navigation, 1973, vol.20, № 2, p.126-136) для определения широты места, путевого угла и вычисления абсолютной скорости чувствительной системы гравиметра, что позволяет определить угол β между вектором абсолютной скорости чувствительной системы 2 и платформой 1, а также радиус кривизны ρ траектории движения чувствительной системы 2, выход которой через блок управления 3 подключен к входу вычислителя 4, выход которого в свою очередь подключен к регистратору 7.
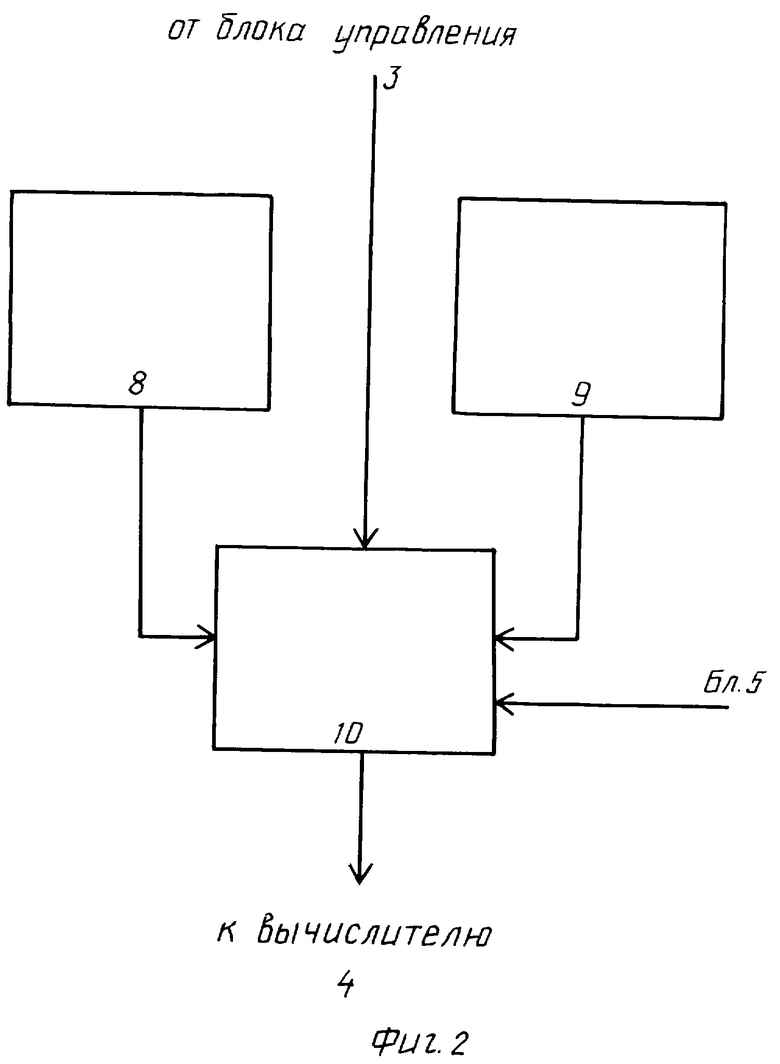
Фиг.2. Блок-схема блока 6. Блок 6 содержит трехкомпонентный измеритель абсолютной скорости 8, в качестве которого можно использовать гидроакустический лаг, измеритель времени 9 и вычислитель 10, реализующий формульные зависимости (7) и (8), к входу которого подключены выходы трехкомпонентного измерителя абсолютной скорости 8 и измерителя времени 9.
Фиг.3. Схема реализации способа включает платформу 1, чувствительную систему 2, ω - угловая скорость вращения Земли, α - путевой угол объекта, ϕ - широта места, ρ - траектория чувствительной системы гравиметра, VH - северная составляющая абсолютной скорости движения объекта, Ve - восточная составляющая абсолютной скорости движения объекта, β - угол между вектором абсолютной скорости чувствительной системы гравиметра и плоскостью горизонта, VH - абсолютная скорость объекта носителя гравиметра, Vx, Vy - продольная и поперечная составляющие абсолютной скорости соответственно.
Определение УСТ на движущемся объекте заявленным способом и устройством производится следующим образом.
При движении объекта-носителя заданным курсом по управляющим электрическим сигналам, формирующимся в блоке управления 3, чувствительная система 2 вырабатывает электрические сигналы, пропорциональные УСТ без учета поправки Этвеша, которые поступают в вычислитель 4.
От навигационного средства 5 сигналы, пропорциональные абсолютной скорости VH, путевому углу α и широте места объекта-носителя, поступают в блок 6 и в вычислитель 4.
Блок 6 вырабатывает электрические сигналы, пропорциональные углу β между вектором абсолютной скорости чувствительной системы 2 и плоскостью горизонта, а также радиусу кривизны ρ траектории ее движения, которые в виде пропорциональных им электрических сигналов поступают в вычислитель 4.
Блок 6 работает следующим образом (фиг.2).
По управляющим электрическим сигналам, формирующимся в блоке управления 3, от трехкомпонентного измерителя абсолютной скорости 8 и измерителя времени 9 электрические сигналы, пропорциональные соответственно текущим значениям вертикальной Vz и горизонтальных Vx, Vy составляющих вектора абсолютной скорости движения чувствительной системы 2 и моментам времени ti их измерений в i-x точках траектории движения объекта-носителя (фиг.3), поступают в вычислитель, где по формулам (7) и (8) вычисляются значения ρ и β, которые поступают в вычислитель 4.
Таким образом, при использовании заявленных изобретений обеспечивается по сравнению с известными способами и устройствами повышение точности определения УСТ на движущемся объекте более чем на порядок, так как практически на порядок уменьшается погрешность на эффект Этвеша и отсутствует погрешность искажения гравитационного поля, обусловленная наличием постоянной времени гравиметра и скорости движения носителя, а также обеспечивается возможность без осреднения значения низкочастотного фильтра гравиметра определить с требуемой точностью абсолютное значение УСТ на движущемся объекте-носителе гравиметра по формуле (6) без использования опорных гравиметрических пунктов.
Источники информации
1. Юзефович А.П., Огородова Л.В. Гравиметрия. - М.: Недра, 1980, с.160-164.
2. Авторское свидетельство СССР 1419347.
3. Патент РФ № 1760875.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550161C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 2010 |
|
RU2426154C1 |
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 2010 |
|
RU2479859C2 |
| СПОСОБ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575316C1 |
| АВТОНОМНЫЙ ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА ПОДВОДНОГО ОБЪЕКТА В ПОДВОДНОМ ПОЛОЖЕНИИ | 2009 |
|
RU2399025C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2563326C1 |
| ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ В ОКЕАНЕ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2007 |
|
RU2348009C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2348011C1 |
Изобретение относится к геофизике и может быть использовано для выполнения на движущемся объекте морской гравиметрической съемки. Согласно изобретению, измеряют ускорение а0 неподвижным относительно объекта гравиметром, определяют широту места ϕ, путевой угол α, скорость VH объекта и вычисляют по полученным данным ускорение силы тяжести g0. Особенностью изобретения является то, что дополнительно по составляющим Vzi, Vxi, Vyi вектора скорости в моменты времени ti и t(i+1) в точках траектории движения определяют угол β между вектором скорости VH и плоскостью горизонта  и радиус кривизны ρ траектории движения
и радиус кривизны ρ траектории движения  , а искомое значение ускорения силы тяжести вычисляют по формуле:
, а искомое значение ускорения силы тяжести вычисляют по формуле:  , где ω - угловая скорость вращения Земли. Этим обеспечивается учет эффекта Этвеша, что повышает точность определения ускорения силы тяжести на движущемся объекте без использования опорных гравиметрических пунктов. 2 н.п. ф-лы, 3 ил.
, где ω - угловая скорость вращения Земли. Этим обеспечивается учет эффекта Этвеша, что повышает точность определения ускорения силы тяжести на движущемся объекте без использования опорных гравиметрических пунктов. 2 н.п. ф-лы, 3 ил.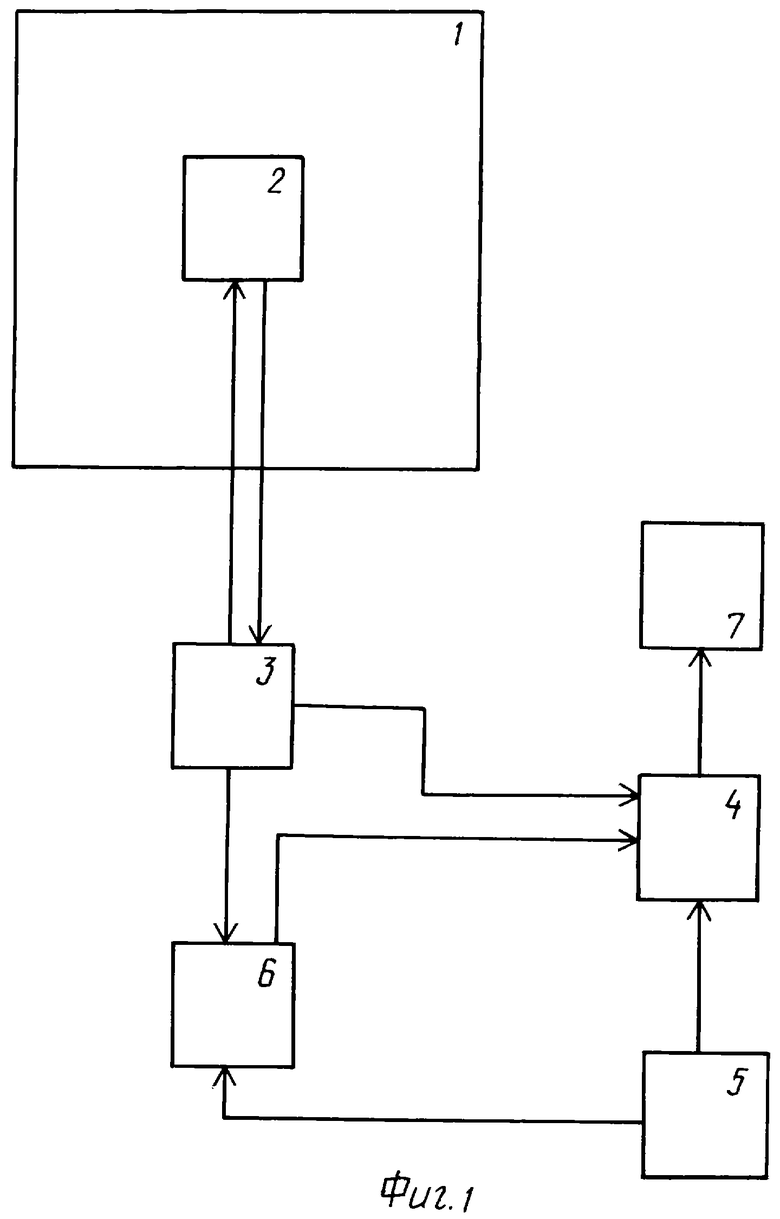

где ω - угловая скорость вращения Земли,
дополнительно измеряют вертикальную Vzi и горизонтальные составляющие Vxi, Vуi вектора абсолютной скорости чувствительной системы гравиметра в моменты времени ti и t(i+1) в точках траектории движения чувствительной системы, а значения β и ρ вычисляют по формулам

а блок для определения β и ρ содержит трехкомпонентный измеритель абсолютной скорости чувствительной системы гравиметра, реализующей формульные зависимости
при этом выходы трехкомпонентного измерителя абсолютной скорости чувствительной системы и измерителя времени подключены к входу вычислителя.
| СПОСОБ ОПРЕДЕЛЕНИЯ СИЛЫ ТЯЖЕСТИ НА МОРСКОМ ОПОРНОМ ПУНКТЕ | 1990 |
|
RU1760875C |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИИ | 1995 |
|
RU2144686C1 |
| ВЕРТОЛЕТНЫЙ ГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2128851C1 |
| ГРАВИИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 1998 |
|
RU2150132C1 |
| ВИНТОВОЙ НАГНЕТАТЕЛЬНЫЙ ВЕНТИЛЯТОР | 1925 |
|
SU4015A1 |
| US 3803916 А, 16.04.1974 | |||
| US 4550601 А, 05.11.1985 | |||
| 0 |
|
SU295297A1 | |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
RU2016383C1 |
| Юзефович А.П., Огородова Л.В | |||
| Гравиметрия | |||
| - М., 1980, с.160-164. | |||

