Изобретение относится к области геофизики, в частности к способам и устройствам определения ускорения силы тяжести (УСТ) на движущемся надводном и подводном объектах и может быть использовано для выполнения морской гравиметрической съемки.
Известен способ определения УСТ в море, включающий измерение УСТ гравиметром, неподвижно установленным на подвижном основании, определение широты места, пути и абсолютной скорости объекта навигационным средством, вычисление по полученным данным поправки за эффект Этвеша и искомого УСТ [1].
Известное устройство для осуществления способа [1] содержит функционально соединенные и расположенные на стабилизированной в горизонте платформе чувствительную систему, блок управления, навигационное средство, вычислитель и регистратор.
Недостаток известных способа и устройства заключается в том, что они имеют недостаточно высокую точность определения УСТ на движущемся объекте при выполнении морской гравиметрической съемки. Это объясняется тем, что при их использовании имеют место существенная погрешность MΔgЭT определения поправки за эффект Этвеша и существенная погрешность MΔgСП определения УСТ на движущемся объекте, обусловленная искажением гравитационного поля, которое возникает за счет значительной (от 3 до 6 мин) постоянной времени низкочастотного фильтра гравиметра, и скоростью изменения гравитационного поля, в котором движется объект. Погрешность MΔgЭT возникает при использовании известных способа и устройства из-за того, что поправку за эффект Этвеша вычисляют по формуле [1]:

если Земля представляется в виде шара, или по формуле:

если Земля представлена в виде эллипсоида, где в формулах (1) и (2):
φ - широта места объекта,
α - путь объекта,
R - радиус Земли,
а, е - большая полуось и эксцентриситет земного эллипсоида,
ω - угловая скорость вращения Земли,
VH - абсолютная скорость движения объекта-носителя гравиметра,
VN, VE - соответственно, северная и восточная составляющая VH.
При определении УСТ в море на движущемся объекте траектория чувствительной системы гравиметра, как правило (в большинстве случаев), не совпадает с поверхностью моря или земного эллипсоида, так как поверхность моря или океана изменяется как во времени, так и в пространстве под воздействием тектонических, гидрометеорологических и других факторов. В результате этого радиус кривизны ρ траектории движения гравиметра может принимать значения от А до ∞ и от -∞ до -А, а угол β между вектором абсолютной скорости гравиметра и плоскостью горизонта может принимать значения от 0 до β.
Погрешность поправки Этвеша MΔgЭT из-за неучета угла β можно вычислить по формуле:

Например, когда β=5° и ΔgЭТ=100 мГал, то погрешность MΔgЭT может достигать 8.7 мГал.
Погрешность поправки Этвеша MΔgρ, обусловленную использованием в формулах (1) и (2) вместо радиуса кривизны траектории движения объекта ρ радиуса Земли R или большей полуоси а и эксцентриситета земного эллипсоида е, можно вычислить по формуле:

Например, когда VH=9 м/с, ρ=106 м, при R=6 378 155 м погрешность MΔgρ составит 6.8 мГал. При этом необходимо учесть, что принятое для расчета погрешности значение ρ не является экстремальным для существующей динамики объекта носителя, движущегося по морской поверхности или удерживающего постоянную глубину погружения при съемке.
Так преобладающий период колебаний подводного объекта составляет 30-120 с, а амплитуда вертикальных перемещений 2…3 м [2].
Отсюда следует, что значение ρ может достигать 3 км, что не учитывается в настоящее время при вычислении поправки Этвеша.
Погрешность MΔgПТ искажения гравиметрического поля, обусловленную наличием постоянной времени гравиметра и скорости движения носителя, можно оценить следующим образом. Известно [3], что погрешность MΔgПТ растет с увеличением постоянной времени гравиметра и скорости изменения гравитационного поля, в котором движется объект-носитель гравиметра, и ее можно вычислить по формуле

где Vg - скорость изменения гравитационного поля, в котором движется объект-носитель гравиметра,
VH - абсолютная скорость объекта-носителя гравиметра,
Т - постоянная времени низкочастотного фильтра гравиметра.
Например, когда Vg=0.8 мГал (средняя скорость изменения в средних широтах по меридиану УСТ) (см. там же), VH=9.25 м/с (допустимая скорость движения объекта-носителя аппаратуры при проведении гравиметрической съемки в океане) [4], Т=3 мин или T=6 мин - значения постоянной времени у современных гравиметров [1], то погрешность MΔgПТ составит 1.3 мГал или 2.6 мГал соответственно.
Однако допустимая погрешность определения УСТ в океане в соответствии с действующими нормативными документами по гравиметрической съемке [4], не должна превышать 1 мГал. Кроме того, для определения абсолютного значения УСТ необходимо использование опорных гравиметрических пунктов (ОГП), что значительно уменьшает эффективность съемки в связи с необходимостью периодического перемещения объекта-носителя в районе ОГП.
Известен [5] способ определения УСТ на движущемся объекте, включающий измерение ускорения ( ) неподвижным относительно объекта гравиметром (акселерометром с вертикальной осью чувствительности), определение широты места φ, пути α, абсолютной скорости VH движения объекта навигационным средством, изменение вертикальной Vzi и горизонтальных составляющих Vxi, Vyi вектора абсолютной скорости чувствительной системы гравиметра в моменты времени ti и t(i+1) в точках траектории движения чувствительной системы и по полученным данным вычисление искомого УСТ (g0) по формулам:
) неподвижным относительно объекта гравиметром (акселерометром с вертикальной осью чувствительности), определение широты места φ, пути α, абсолютной скорости VH движения объекта навигационным средством, изменение вертикальной Vzi и горизонтальных составляющих Vxi, Vyi вектора абсолютной скорости чувствительной системы гравиметра в моменты времени ti и t(i+1) в точках траектории движения чувствительной системы и по полученным данным вычисление искомого УСТ (g0) по формулам:



где ω - угловая скорость вращения Земли;
β и ρ - угол между вектором абсолютной скорости движения чувствительной системы гравиметра и плоскостью горизонта, радиус кривизны траектории движения чувствительной системы гравиметра соответственно.
Известно [5] устройство, содержащее функционально соединенные и расположенные на стабилизированной в плоскости горизонта платформе чувствительную систему гравиметра, блок управления, навигационное средство, блок определения угла β между вектором абсолютной скорости движения чувствительной системы гравиметра и плоскостью горизонта, а также радиуса кривизны ρ траектории движения чувствительной системы гравиметра, в состав которого входит трехкомпонентный измеритель абсолютной скорости движения чувствительной системы гравиметра, вычислитель и регистратор.
Недостатком известных способа и устройства является то, что при их использовании необходимо измерять вертикальную и горизонтальные составляющие вектора абсолютной скорости движения в точках траектории движения чувствительной системы гравиметра, что является весьма сложной проблемой, поскольку у существующих измерителей абсолютной скорости движения объекта чувствительные системы (антенны) расположены в днище объекта в местах, не совпадающих с местом расположения чувствительной системы гравиметра. Данное обстоятельство обуславливает существенную погрешность измерения вертикальной и горизонтальных составляющих вектора абсолютной скорости движения чувствительной системы гравиметра из-за того, что ее траектория перемещения отличается от траектории перемещения антенны измерителя абсолютной скорости движения объекта при его перемещении.
Целью изобретения является упрощение процесса, повышение точности и обеспечение автономности определения ускорения силы тяжести Земли на движущемся надводном или подводном объекте без использования трехкомпонентного измерителя абсолютной скорости движения чувствительной системы гравиметра вдоль траектории ее перемещения.
Поставленная цель достигается тем, что в известном [5] способе определения УСТ на движущемся объекте, наиболее близком по технической сущности с заявленным способом, включающем измерение ускорения () неподвижным относительно объекта гравиметром (акселерометром с вертикальной осью чувствительности), определение широты места φ, пути α, абсолютной скорости VH движения объекта навигационным средством, определение угла β между вектором абсолютной скорости VH движения объекта и плоскостью горизонта, радиуса кривизны р траектории движения чувствительной системы гравиметра, а искомое значение абсолютного УСТ g0 вычисляют по формуле (6), измеряют ускорения  и
и  соответственно первым и вторым акселерометрами с вертикальной осью чувствительности при перемещении их на объекте навстречу друг другу в плоскости горизонта по направлению проекции на плоскость горизонта абсолютной скорости движения объекта VH в моменты встречи их на траверзе с чувствительной системой гравиметра, при этом измеряют линейную скорость VГ относительно движущегося объекта, а значения β и р определяют путем вычисления по формулам:
соответственно первым и вторым акселерометрами с вертикальной осью чувствительности при перемещении их на объекте навстречу друг другу в плоскости горизонта по направлению проекции на плоскость горизонта абсолютной скорости движения объекта VH в моменты встречи их на траверзе с чувствительной системой гравиметра, при этом измеряют линейную скорость VГ относительно движущегося объекта, а значения β и р определяют путем вычисления по формулам:

где
- ускорение, измеренное неподвижным относительно объекта гравиметром (акселерометром с вертикальной осью чувствительности);
и - ускорения, измеренные соответственно первым и вторым акселерометрами с вертикальной осью чувствительности при движении их на объекте навстречу друг другу в горизонте и в направлении пути α движения объекта в моменты встречи их на траверзе с чувствительной системой гравиметра;
β - угол между вектором абсолютной скорости движения объекта и плоскостью горизонта;
р - радиус кривизны траектории движения чувствительной системы гравиметра;
VH - абсолютная скорость движения объекта;
ω - угловая скорость вращения Земли;
α - путь движения объекта;
φ - широта места объекта;
VГ - горизонтальная линейная скорость движения первого и второго акселерометров относительно движущегося объекта.
Поставленная цель достигается также тем, что наиболее близкое по технической сущности с заявленным устройством известное устройство [5], содержащее чувствительную систему гравиметра, расположенную на косвенно стабилизированной в плоскости горизонта платформе, блок управления, навигационное средство, блок определения значений β и р, вычислитель, регистратор, при этом выходы чувствительной системы гравиметра и навигационного средства соединены через блок управления с входом блока определения значений β и р, выход которого соединен с входом вычислителя, выход которого соединен с входом регистратора.
Для определения значений β и р устройство снабжено расположенными на косвенно стабилизированной в плоскости горизонта и в направлении пути объекта платформы первым и вторым акселерометрами с вертикальными осями чувствительности, механизмом перемещения чувствительных элементов данных акселерометров, в плоскости горизонта навстречу друг другу по направлению пути α движения объекта, измеритель линейной скорости перемещения чувствительных элементов первого и второго акселерометров, регистратор моментов встречи данных чувствительных элементов на траверзе с чувствительной системой гравиметра и вычислитель, реализующей формульные зависимости (9) и (10), вход которого через блок управления соединен с выходами первого и второго акселерометра, измерителя скорости движения первого и второго чувствительных элементов относительно объектов и регистратора моментов встречи чувствительных элементов первого и второго акселерометров на траверзе с чувствительной системой гравиметра.
Определение УСТ на движущемся объекте заявленным способом и устройством осуществляется следующим образом.
На фиг.1 изображена структурная схема устройства для осуществления заявленного способа.
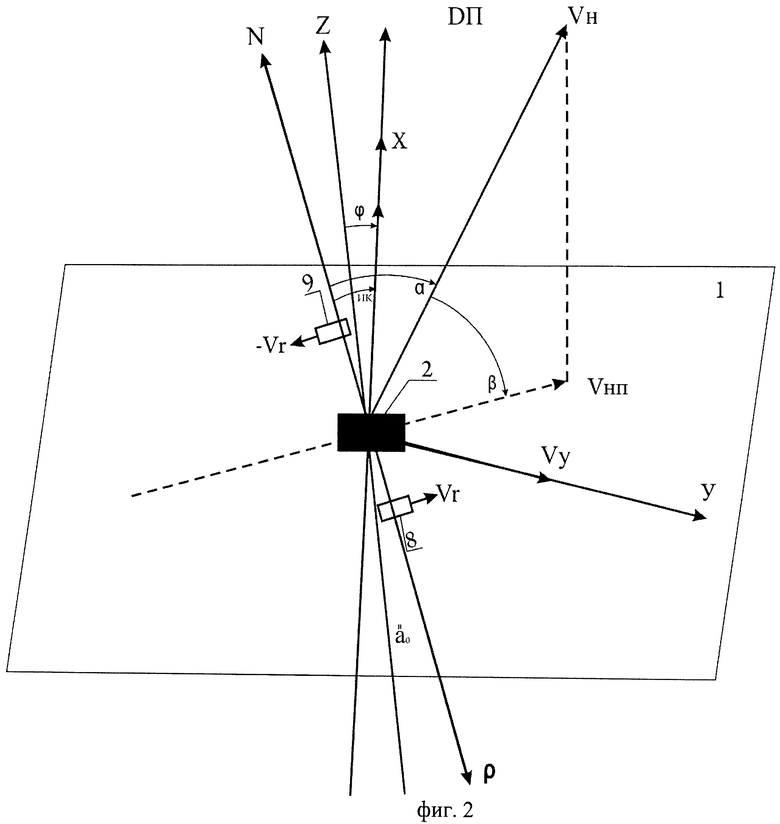
На фиг.2 схематически изображен заявленный способ определения УСТ на движущемся объекте.
Заявленный способ определения УСТ на движущемся объекте можно реализовать устройством (см. фиг.1), содержащим расположенную на косвенно стабилизированной в плоскости горизонта и по направлению пути движения объекта платформе - 1 чувствительную систему гравиметра - 2, блок управления - 3, навигационное средство - 4, блок определения значений β и р, вычислитель - 6 и регистратор - 7, при этом выходы чувствительной системы гравиметра - 2 и навигационного средства - 4 соединены через блок управления - 3 с входом вычислителя - 6 и блока - 5 определения значений β и р, выход вычислителя - 6 соединен с входом регистратора - 7.
Для определения β и р устройство содержит расположенные на косвенно стабилизированной в плоскости горизонта и в направлении пути движения судна платформе - 1 первый - 8 и второй - 9 акселерометры с вертикальными осями чувствительности, механизм - 10 перемещения данных акселерометров навстречу друг другу по направлению пути движения объекта в плоскости горизонта с постоянной линейной относительно объекта скоростью, измеритель - 11 линейной скорости перемещения чувствительных элементов акселерометров - 8 и 9, регистратор - 12 моментов встречи чувствительных элементов - 8 и 9 на траверзе с чувствительной системой гравиметра - 2, при этом выходы первого - 8, второго - 9 акселерометров и гравиметра - 2, измерителя - 11 линейной скорости перемещения чувствительных элементов акселерометров - 8 и 9, регистратора - 12 моментов встречи данных акселерометров на траверзе с чувствительной системой гравиметра - 2, навигационного средства - 4 через блок управления - 3 соединены с входом вычислителя - 6.
Механизм - 10 может быть выполнен на основе кривошипно-шатунного устройства обеспечивающего перемещения первого - 8 и второго - 9 акселерометров по направляющим, расположенным на платформе - 1, навстречу друг другу.
Механизм - 10 может также быть выполнен на основе устройства, содержащего функционально соединенные редуктор, электродвигатель и червячную передачу.
Блок управления - 3 может быть реализован на основе микропроцессора, обеспечивающего ввод-вывод информации и преобразования сигналов от нескольких датчиков, например микропроцессора семейства AVR фирмы АТМЕС.
Блок - 5 определения значений β и р может быть реализован, например, на основе ЭВМ PC/AT фирмы IBM со специальным программным обеспечением.
Измеритель - 11 линейной скорости перемещения относительно объекта чувствительных элементов акселерометров - 8 и 9 может быть выполнен в виде интерферометрического датчика типа интерферометра Майкельсона, а также может быть использован и тахометр.
Регистратор - 12 моментов встречи чувствительных элементов акселерометров - 8 и 9 на траверзе с чувствительной системой гравиметра - 2 может быть выполнен в виде фотометрического датчика.
Таким образом, предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартное оборудование и приспособления, используемые для изготовления морских приборов и технических средств.
Определение УСТ на движущемся объекте заявленным способом и устройством производится следующим образом.
При движении объекта истинным курсом (ИК) углом, образованным направлением на север N и направлением диаметральной плоскости объекта ДП (см. фиг.2) по управляющим электрическим сигналам, формирующимся в блоке управления - 3, чувствительная система гравиметра - 2 вырабатывает электрические сигналы, пропорциональные УСТ α0, а навигационное средство - 4 вырабатывает электрические сигналы, пропорциональные абсолютной скорости объекта VH, пути α и широте места объекта φ, которые поступают в вычислитель - 6.
По управляющим электрическим сигналам, формирующимся в блоке управления - 3, блок - 5 вырабатывает электрические сигналы, пропорциональные углу β и ρ, по формулам (9) и (10), которые поступают в вычислитель - 6, где вычисляется искомое УСТ по формуле (6).
Вывод формул (6), (9) и (10) можно произвести следующим образом.
На чувствительные элементы акселерометров - 8 и 9, а также на чувствительную систему - 2 при движении объекта по траектории действуют обусловливающие значения эффекта Этвеша проекции на направление отвесной линии iz двух ускорений - центробежного  и кориолисова
и кориолисова  возникающего вследствие движения объекта по вращающейся поверхности. Величина центробежного ускорения равна [6].
возникающего вследствие движения объекта по вращающейся поверхности. Величина центробежного ускорения равна [6].

где Vj - скорости движения чувствительной системы - 2, чувствительных элементов - 8, 9 относительно Земли.
Кориолисово ускорение равно (см. там же)

Соответствующие проекции их на ось Z Wφzj и Vkzj равны


где ωх, ωy - проекции угловой скорости вращения Земли на оси х и y соответственно;
Vxj, Vyj - проекции скорости Vj на оси х и y, соответственно.
При этом

Vx = 0
проекции Vxj, Vyj скоростей Vj (j - 0, 1, 2) движения чувствительных систем - 2, 8 и 9 будут вычисляться, соответственно, как






a скорости Vj (j - 0, 1, 2), соответственно, как
V0=VH


Подставив формулы (15), (16), (17), (18) в формулу (14), объединив полученные выражения для кориолисовых ускорений с соответствующими центробежными ускорениями для чувствительной системы - 2 и чувствительных элементов акселерометров - 8 и 9, полученными по формуле (13) после подстановки в нее выражений (19) и после вычисленного результата из величины искомого ускорения свободного падения g0, можно получить выражение, определяющее величины измеряемых чувствительной системой - 2 и чувствительными элементами акселерометров - 8 и 9 ускорений, , , соответственно, которые вычисляются по формулам:
 ,
,

 .
.
Решив полученную систему из трех уравнений (20), можно получить формулы (6), (9) и (10) для вычисления g0, β и ρ соответственно.
Оценку точности определения ускорения силы тяжести заявленным способом и устройством можно произвести следующим образом.
Формульную зависимость для вычисления погрешности определения ускорения силы тяжести на движущемся объекте по формуле (6) при вычислении β и ρ по формулам (9) и (10) соответственно можно получить путем дифференцирования формул (6), (9) и (10).
При этом производные берутся по измеренным параметрам, которые влияют на величину погрешности определения g0. К ним относятся , , , VH.
Формула для вычисления погрешности определения УСТ mg не приведена из-за ее сложности.
Например, для случая, когда для вычисления mg приняты ниже значения параметров, максимально влияющих на погрешность mg, а именно cosφ=1, sinα=1, VH=9.25 м/с, ρ=106 м, а также при значении погрешности  (погрешность определения абсолютной скорости VH объекта у современных лагов [4]) и значение погрешности
(погрешность определения абсолютной скорости VH объекта у современных лагов [4]) и значение погрешности  [4], погрешность mg не превышает 1 мГал.
[4], погрешность mg не превышает 1 мГал.
Таким образом, при использовании заявленного изобретения обеспечивается по сравнению с прототипом существенное упрощение процесса, повышение точности и обеспечение автономности определения абсолютного ускорения силы тяжести на движущемся надводном или подводном объекте, поскольку отсутствует необходимость с требуемой точностью измерять вертикальную и горизонтальные составляющие вектора абсолютной скорости в точках траектории движения чувствительной системы гравиметра, что является весьма сложной проблемой, особенно на движущемся подводном объекте, где невозможно использовать спутниковую навигационную систему типа GPS или "Глонасс" в дифференцированном режиме.
Источники информации
1. Юзефович А.П., Огородова Л.В. Гравиметрия. Москва, "Недра", 1980, с.160-164.
2. Попов Е.И. Определение силы тяжести на подвижном основании. Москва, "Наука", 1967, с.178.
3. Аппаратура и методы экспериментальных исследований по гравиметрии Москва, "Наука", 1965, с.103.
4. Единые технические требования по Мировой гравиметрической съемке (ИГ-78). Ленинград, изд. ГУНиО МО СССР, 1979, с.6-7.
5. Патент РФ RU 2324207 C1.
6. Бухгольц Н.Н. Основной курс теоретической механики. Часть 1. М., "Наука", 1967, с.75-164.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 2010 |
|
RU2426154C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550161C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324207C1 |
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ В ОКЕАНЕ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2007 |
|
RU2348009C1 |
| АВТОНОМНЫЙ ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА ПОДВОДНОГО ОБЪЕКТА В ПОДВОДНОМ ПОЛОЖЕНИИ | 2009 |
|
RU2399025C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2563326C1 |
| СПОСОБ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575316C1 |
| Способ морской гравиметрической съемки и устройство для его осуществления | 2020 |
|
RU2767153C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2348011C1 |
Изобретение относится к измерительной технике и может быть использовано для определения ускорения силы тяжести (УСТ) на движущемся объекте для выполнения морской гравиметрической съемки. Согласно способу, измеряют ускорение неподвижным относительно объекта гравиметром, определяют широту места φ, путь α, абсолютную скорость VH движения объекта навигационным средством и определяют угол β между вектором абсолютной скорости VH движения объекта и плоскостью горизонта, радиус кривизны р траектории движения чувствительной системы гравиметра и по полученным данным вычисляют УСТ g0 по выражению:  , где ω - угловая скорость вращения Земли. Особенностью способа является то, что измеряют ускорения и соответственно первым и вторым акселерометрами с вертикальной осью чувствительности при движении их на объекте навстречу друг другу в горизонте и в направлении пути α объекта в моменты встречи их на траверзе с чувствительной системой гравиметра, при этом значения β и р определяют согласно приведенному в изобретении математическому выражению. Предложено также устройство для реализации этого способа. Изобретение обеспечивает упрощение и повышение точности измерения УСТ. 2 н.п. ф-лы, 2 ил.
, где ω - угловая скорость вращения Земли. Особенностью способа является то, что измеряют ускорения и соответственно первым и вторым акселерометрами с вертикальной осью чувствительности при движении их на объекте навстречу друг другу в горизонте и в направлении пути α объекта в моменты встречи их на траверзе с чувствительной системой гравиметра, при этом значения β и р определяют согласно приведенному в изобретении математическому выражению. Предложено также устройство для реализации этого способа. Изобретение обеспечивает упрощение и повышение точности измерения УСТ. 2 н.п. ф-лы, 2 ил.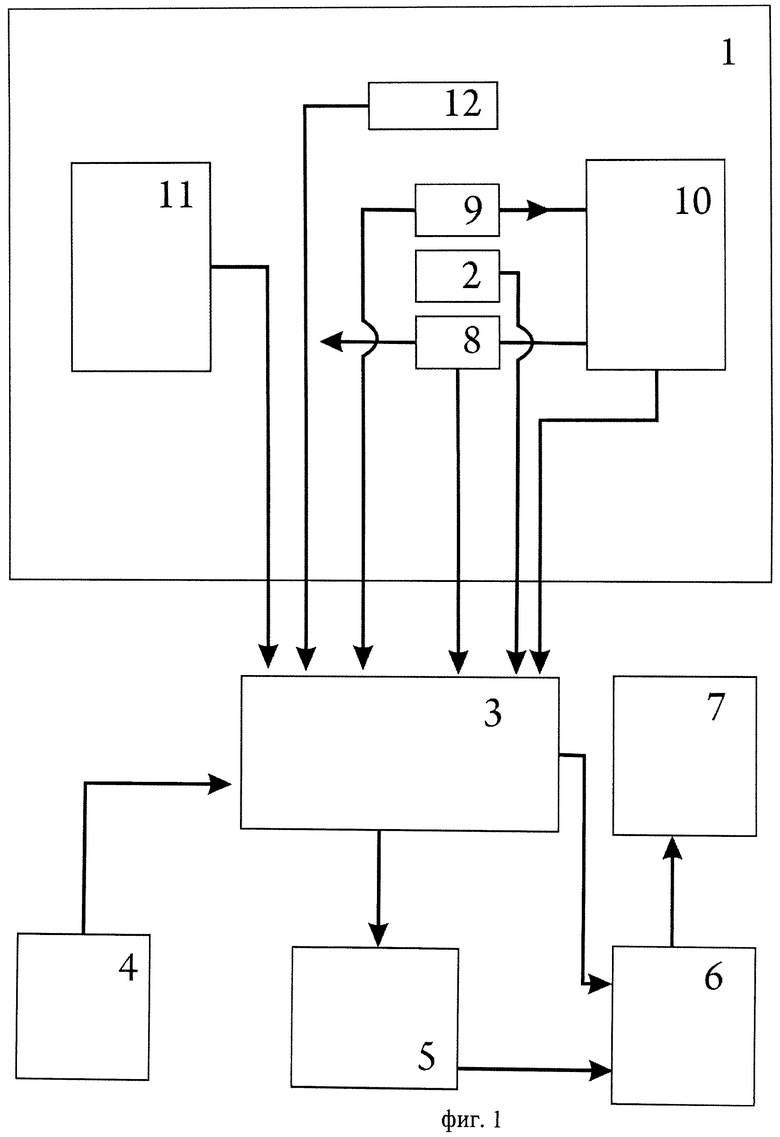
1. Способ определения ускорения силы тяжести на движущемся объекте, включающий измерение ускорения  неподвижным относительно объекта гравиметром (акселерометром с вертикальной осью чувствительности), определение широты места φ, пути α, абсолютной скорости VH движения объекта навигационным средством, определение угла β между вектором абсолютной скорости VH движения объекта и плоскостью горизонта, радиуса кривизны ρ траектории движения чувствительной системы гравиметра, а искомое значение ускорения силы тяжести g0 определяют путем вычисления по формуле:
неподвижным относительно объекта гравиметром (акселерометром с вертикальной осью чувствительности), определение широты места φ, пути α, абсолютной скорости VH движения объекта навигационным средством, определение угла β между вектором абсолютной скорости VH движения объекта и плоскостью горизонта, радиуса кривизны ρ траектории движения чувствительной системы гравиметра, а искомое значение ускорения силы тяжести g0 определяют путем вычисления по формуле:

где ω - угловая скорость вращения Земли,
отличающийся тем, что измеряют ускорения  и
и  соответственно первым и вторым акселерометрами с вертикальной осью чувствительности при движении их на объекте навстречу друг другу в горизонте и в направлении пути α объекта в моменты встречи их на траверзе с чувствительной системой гравиметра, при этом измеряют горизонтальную линейную скорость VГ движения первого и второго акселерометров относительно движущегося объекта, а значения β и ρ определяют путем вычисления по формулам:
соответственно первым и вторым акселерометрами с вертикальной осью чувствительности при движении их на объекте навстречу друг другу в горизонте и в направлении пути α объекта в моменты встречи их на траверзе с чувствительной системой гравиметра, при этом измеряют горизонтальную линейную скорость VГ движения первого и второго акселерометров относительно движущегося объекта, а значения β и ρ определяют путем вычисления по формулам:


2. Устройство для определения ускорения силы тяжести на движущемся объекте, содержащее чувствительную систему гравиметра, расположенную на косвенно стабилизированной в плоскости горизонта платформе, блок управления, навигационное средство, блок определения значений β и ρ, вычислитель и регистратор, при этом выходы чувствительной системы гравиметра и навигационного средства соединены через блок управления с выходом блока определения значений β и ρ, выход которого соединен с входом вычислителя, реализующего формульную зависимость

выход которого соединен с входом регистратора, отличающееся тем, что на косвенно стабилизированной в плоскости горизонта платформе дополнительно в направлении пути α движения объекта установлены первый и второй акселерометры с вертикальными осями чувствительности, механизмом движения чувствительных элементов данных акселерометров в плоскости горизонта навстречу друг другу по направлению пути α движения объекта, измерителем линейной скорости движения чувствительных элементов первого и второго акселерометров относительно объекта, регистратором моментов встречи данных чувствительных элементов на траверзе с чувствительной системой гравиметра и вычислитель, дополнительно реализующий формульные зависимости:

где  - ускорение, измеренное неподвижным относительно объекта гравиметром (акселерометром с вертикальной осью чувствительности);
- ускорение, измеренное неподвижным относительно объекта гравиметром (акселерометром с вертикальной осью чувствительности);
 и
и  - ускорения, измеренные соответственно первым и вторым акселерометрами с вертикальной осью чувствительности при движении их на объекте навстречу друг другу в горизонте и в направлении пути α движения объекта в моменты встречи их на траверзе с чувствительной системой гравиметра;
- ускорения, измеренные соответственно первым и вторым акселерометрами с вертикальной осью чувствительности при движении их на объекте навстречу друг другу в горизонте и в направлении пути α движения объекта в моменты встречи их на траверзе с чувствительной системой гравиметра;
β - угол между вектором абсолютной скорости движения объекта и плоскостью горизонта;
ρ - радиус кривизны траектории движения чувствительной системы гравиметра;
VH - абсолютная скорость движения объекта;
ω - угловая скорость вращения Земли;
α - путь движения объекта;
φ - широта места объекта;
VГ - горизонтальная линейная скорость движения первого и второго акселерометров относительно движущегося объекта.
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324207C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СИЛЫ ТЯЖЕСТИ НА МОРСКОМ ОПОРНОМ ПУНКТЕ | 1990 |
|
RU1760875C |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИИ | 1995 |
|
RU2144686C1 |
| ВЕРТОЛЕТНЫЙ ГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2128851C1 |
| ГРАВИИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 1998 |
|
RU2150132C1 |
| ВИНТОВОЙ НАГНЕТАТЕЛЬНЫЙ ВЕНТИЛЯТОР | 1925 |
|
SU4015A1 |
| US 3803916 А, 16.04.1974 | |||
| US 4550601 A, 05.11.1985 | |||
| 0 |
|
SU295297A1 | |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
RU2016383C1 |
| Юзефович А.П., Огородова Л.В | |||
| Гравиметрия | |||
| - М., 1980, с.160-164 | |||
| Попов Е.И | |||
| Определение силы тяжести на подвижном основании | |||
| - М., 1967, с.178. | |||

