Изобретение относится к области машиностроительной гидравлики, а именно к электрогидравлическим системам управления перемещением различных объектов управления.
Известна электрогидравлическая система управления по патенту РФ №2641192 «Электрогидравлическая система управления».
Данная электрогидравлическая система управления (ЭГСУ), принятая за прототип содержит гидробак, регулируемый насос с регулятором давления, электрогидравлические приводы (ЭГП), каждый из которых включает в себя пропорциональный гидрораспределитель с LS каналами, пульт управления, сумматор, исполнительный гидродвигатель, кинематически соединенный с объектом управления, широтно-импульсный модулятор (ШИМ), дифференпирующее звено, датчик относительного положения, установленный на объекте управления, датчик положения золотника пропорционального гидрораспределителя, гидрозамок и LS клапан, причем напорная магистраль регулируемого насоса гидравлически соединена со входами ЭГП, всасывающая полость регулируемого насоса и сливные магистрали ЭГП соединены с гидробаком, выход пульта управления соединен с неинвертирующим входом сумматора, первый инвертирующий вход которого соединен с выходом датчика положения золотника пропорционального гидрораспределителя, выход датчика относительного положения объекта управления через дифференцирующее звено соединен со вторым инвертирующим входом сумматора, выход которого соединен с входом ШИМ, выходы которого соединены с управляющими входами пропорционального гидрораспределителя, гидравлический вход ЭГП через LS клапан гидролинией соединен с первым входом пропорционального гидрораспределителя, сливные гидролинии ЭГП соединены со вторым входом пропорционального гидрораспределителя, первый и второй выходы пропорционального гидрораспределителя гидравлически соединены через гидрозамок с входами исполнительного гидродвигателя, третий выход пропорционального гидрораспределителя гидролинией соединен с управляющим входом LS клапана.
Прототипу присущ недостаток, связанный с циклами первоначального наведения и перенаведения объектов управления, имеющих значительные моменты неуравновешенности.
Циклограмма работы приводов объекта управления предусматривает циклы наведения (перенаведения) в заданное положение объекта управления и периоды отсутствия наведения объекта управления с сохранением заданных координат. При отсутствии наведения объекта управления для сохранения заданных координат в электрогидравлической системе предусмотрено перекрытие гидролиний с выходов гидродвигателей (гидроцилиндров) гидрозамками.
Начало цикла наведения (перенаведения) предусматривает открытие гидрозамков и подачу управляющего сигнала на пропорциональные гидрораспределители приводов, при этом при наличии неуравновешенности объекта управления наблюдается его несанкционированное перемещение в сторону действия момента неуравновешенности на некоторую величину. Величина несанкционированного перемещения зависит от величины момента неуравновешенности и от объема рабочей жидкости в магистралях между гидрозамками и пропорциональными гидрораспределителями.
Основной причиной данного недостатка является сжимаемость рабочей жидкости в магистралях между гидрозамками и пропорциональными гидрораспределителями от воздействии давления, вызванного моментом неуравновешенности объекта управления, после открытия гидрозамка.
Целью заявляемого изобретения является исключение несанкционированных перемещений объектов управления в режимах их наведения и перенаведения, в том числе и при изменяющихся параметрах нагрузки объектов управления. Соответственно, исключение несанкционированных перемещений объека управления приводит к уменьшению времени перенаведения в заданные координаты.
Указанная цель достигается тем, что в электрогидравлическую систему управления, содержащую регулируемый насос с регулятором давления, бак, соединенный с всасывающим входом насоса, один или несколько электрогидроприводов, каждый из которых содержит гидродвигатель, кинематически связаный со своим объектом управления, пропорциональный гидрораспределитель с датчиком положения золотника, сумматор, пульт управления, ШИМ, датчик относительного положения объекта управления, дифференцирующее звено, клапан LS, гидрозамок, причем выход насоса соединен с гидравлическими входами каждого электрогидропривода и далее соединяется с напорным входом пропорционального гидрораспределителя через LS клапан, сливная линия пропорционального гидрораспределителя соединяется со сливной линией электрогидропривода и далее с баком, выходы ШИМ подключены к управляющим входам пропорционального гидрораспределителя, выход датчика положения золотника гидрораспределителя соединен с первым инвертирующим входом сумматора, выход сумматора соединен с входом ШИМ, выход датчика относительного положения через дифференцирующее звено соединен со вторым инвертирующим входом сумматора, управляющий вход LS клапана через LS каналы пропорционального гидрораспределителя соединен с выходными гидролиниями пропорционального гидрораспределителя, ВВЕДЕНЫ дачик давления и устройство управления, а гидрозамок выполнен электроуправляемым, при этом выход пульта управления соединен с первым входом устройства управления, вход датчика давления подключен к выходу гидродвигателя, выход датчика давления соединен со вторым входом устройства управления, первый выход устройства управления соединен с неинвертирующим входом сумматора, второй выход устройства управления соединен с управляющим входом гидрозамка, а время задержки управляющего сигнала на включение гидрозамка после подачи управляющего сигнала на пропорциональный гидрораспределитель определяется из соотношения:
где Рраб - рабочее давление, измеряемое датчиком давления;
V - объем сжимаемой жидкости; Е - модуль упругости рабочей жидкости;
Qгр - поток рабочей жидкости через пропорциональный гидрораспределитель, который определяется по величине сигнала пульта управления и расходной характеристике гидрораспределителя.
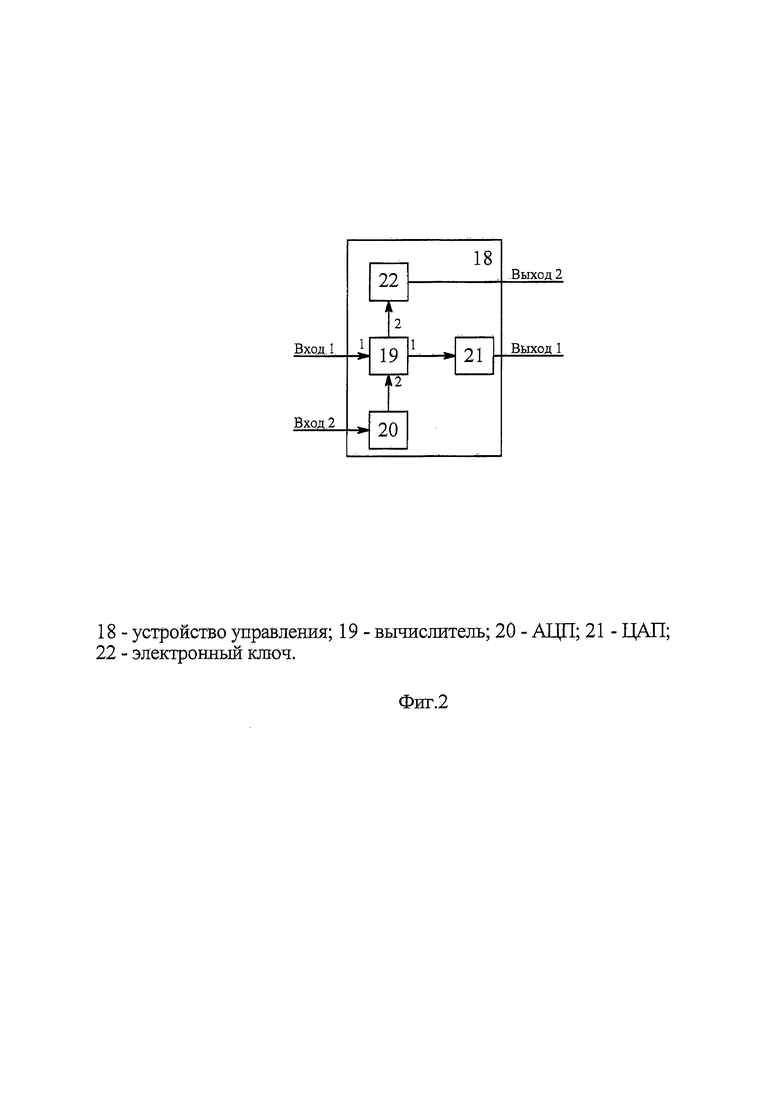
Устройство управления содержит вычислитель, аналого-цифровой преобразователь (АЦП), цифро-аналоговый преобразователь (ЦАП) и электронный ключ для включения гидрозамка, причем первый вход устройства управления соединен с первым входом вычислителя, второй вход устройства управления соединен со входом АЦП, выход которого соединен с вторым входом вычислителя, первый выход вычислителя соединен с входом ЦАП, выход ЦАП соединен с с первым выходом устройства управления, второй выход вычислителя соединен с входом электронного ключа, выход электронного ключа соединен с вторым выходом устройства управления. Материалы заявки поясняются графическими материалами:
Фиг. 1 - структурно-функциональная схема заявляемой ЭГСУ,
Фиг. 2 - структурно-функциональная схема устройства управления.
ЭГСУ (фиг. 1) содержит регулируемый насос 1 с регулятором давления 2, гидробак 3, соединенный с всасывающим входом регулируемого насоса 1, один или более электрогидроприводы, например 4 и 5, каждый из которых содержит исполнительный гидродвигатель 6, кинематически связаный со своим объектом управления 7, пропорциональный гидрораспределитель 8 с LS каналом и датчиком положения золотника 9, сумматор 10, пульт управления 11, широтно-импульсный модулятор (ШИМ) 12, датчик относительного положения 13 объекта управления 7, дифференцирующее звено 14, LS клапан 15, гидрозамок 16, датчик давления 17 и устройство управления 18, причем выходы ШИМ 12 подключены к управляющим входам пропорционального гидрораспределителя 8, выход датчика положения золотника 9 пропорционального гидрораспределителя 8 соединен с первым инвертирующим входом сумматора 10, выход пульта управления 11 соединен с первым входом устройства управления 18, выход датчика давления 17 соединен со вторым входом устройства управления 18, первый выход которого соединен с неинвертирующим входом сумматора 10, выход сумматора 10 соединен с входом ШИМ 12, выход датчика относительного положения 13 через дифференцирующее звено 14 соединен с вторым инвертирующим входом сумматора 10, первый и второй выходы пропорционального гидрораспределителя 8 гидролиниями через гидрозамок 16 подключены к исполнительному гидродвигателю 6, управляющий вход гидрозамка 16 соединен со вторым выходом устройства управления 18, выход регулируемого насоса 1 соединен с гидравлическим входом электрогидропривода 4, который соединяется с первым (напорным) входом пропорционального гидрораспределителя 8 через LS клапан 15, управляющий вход которого гидравлически соединен с третьим выходом (LS каналы) пропорционального гидрораспределителя 8, второй вход (сливная линия) пропорционального гидрораспределителя 8 соединена со сливной линией электрогидропривода 4 и далее с гидробаком 1.
Устройство управления 18 (фиг 2) содержит вычислитель 19, аналого-цифровой преобразователь (АЦП) 20, цифро-аналоговый преобразователь (ЦАП) 21 и электронный ключ 22 для включения гидрозамка, причем первый вход устройства управления 18 соединен с первым входом вычислителя 19, второй вход устройства управления 18 соединен со входом АЦП 20, выход которого соединен со вторым входом вычислителя 19, первый выход вычислителя 19 соединен со входом ЦАП 21, выход ЦАП 21 соединен с первым выходом устройства управления 18, второй выход вычислителя 19 соединен с входом электронного ключа 22, выход электронного ключа 22 соединен с вторым выходом устройства управления 18. ЭГСУ (фиг. 1) работает следующим образом.
После включения регулируемого насоса 1 рабочая жидкость с выхода регулируемого насоса 1 поступает в электрогидропривод, например 4, и далее через LS клапан 15 на напорный вход пропорционального гидрораспределителя 8.
При поступлении сигналов с пульта управления 11 и датчика давления 17 на первый и второй входы устройства управления 18 (фиг. 2), и его преобразования в АЦП 20, вычислитель 19 рассчитывает величину сигнала управления пропорциональным гидрораспределителем 8 и времени задержки включения гидрозамка 16. Сигнал с первого выхода вычислителя 19 после преобразования в ЦАП 21 с первого выхода блока преобразования 18 поступает на неинвертирующий вход сумматора 10 (фиг. 1) и после преобразования в ШИМ 12 поступает на управляющие входы пропорционального гидрораспределителя 8.
Сигнал со второго выхода вычислителя 19 (фиг. 2) через электронный ключ 22 со второго выхода устройства управления 18 поступает на упраляющий вход гидрозамка 16 (фиг.1), подключая выходы пропорционального гидрораспределителя 8 к рабочим полостям исполнительного гидродвигателя 6.
В соответствии с расходной характеристикой пропорционального гидрораспределителя 8 рабочая жидкость с первого выхода пропорционального гидрораспределителя 8 поступает в магистрали между пропорциональным гидрораспределителем 8 и гидрозамком 16.
Как известно, сжатый объем рабочей жидкости Vсж определяется из соотношения:

где V - объем сжимаемой жидкости между пропорциональным гидрораспределителем 8 и гидрозамком 16.
Рраб - рабочее давление рабочей жидкости в магистрали между пропорциональным гидрораспределителем 8 и гидрозамком 16, измеряемое датчиком давления 17;
Е - модуль упругости рабочей жидкости. Таким образом, время задержки Тз на подачу сигнала открытия гидрозамка 16, необходимое для исключения несанкционированного перемещения объекта управления 7 определится как:
где Qгp - поток рабочей жидкости через пропорциональный гидрораспределитель 8, который определяется по величине сигнала пульта управления 11 и расходной характеристике гидрораспределителя 8.
Устройство управления 18, исходя из сжимаемого объема рабочей жидкости в магистралях между пропорциональным гидрораспределителем 8 и гидрозамком 16 с учетом величины потока рабочей жидкости с выхода пропоционального гидрораспределителя 8, определяемого по его расходной характеристике, рассчитывает необходимое время задержки на подачу управляющего сигнала на вход гидрозамка 16 для его открытия. Для режима наведения, когда вектор скорости наведения объекта управления 7 совпадает по направлению с вектором момента неуравновешенности, первоначальное задание перемещения золотника пропорционального гидрораспределителя 8 относительно нейтрального положения до открытия гидрозамка 16, задается противоположным по сравнению с периодом после открытия гидрозамка 16. Физически это означает, что до открытия гидрозамка 16 осуществляется подъем давления в магистралях между пропорциональным гидрораспределителем 8 и гидрозамком 16.
Сигнал с первого выхода устройства управления 18, просуммированный в сумматоре 10 с сигналами обратных связей датчика положения золотника 9 и дифференцирующего звена 14 с выхода сумматора 10 поступает на вход ШИМ 12 и далее с его выходов на управляющие входы пропорционального гидрораспределителя 8, вызывая отклонение его золотника.
Регулируемый насос 1 работает в режиме поддержания постоянного давления, при этом необходимый расход рабочей жидкости создается «по потребности» за счет регулирования отклонения люльки регулируемого насоса 1 регулятором давления 2. Реверсивные пропорциональные гидрораспределители 8 для обеспечения как минимальных, так и максимальных скоростей перемещения объектов управления 7, имеют расходную характеристику, соответствующую положению золотника пропорционального гидрораспределителя 8. Наличие в пропорциональных гидрораспределителях датчиков положения золотников 9 позволяет обеспечить позиционирование золотников в зависимости от величины сигнала управления. Необходимо отметить также, что наличие датчика положения золотника 9 обеспечивает улучшенную частотную характеристику пропорционального гидрораспределителя 8 и соответственно повышает его быстродействие для обеспечения быстрого перевода золотника пропорционального гидрораспределителя 8 в заданное положение после включения гидрозамка 16.
LS клапан 15, через который поступает рабочая жидкость на пропорциональный гидрораспределитель 8, при изменении нагрузки обеспечивает перепад давления на золотнике пропорционального гидрораспределителя 8, близкий к постоянному. Постоянство перепада давления формируется за счет регулирования величины перепада давления на LS клапане 15, на один вход которого поступает давление регулируемого насоса 1, а на другой через LS каналы - давление в исполнительном гидродвигателе 6 от действия нагрузки объекта управления 7. В результате обеспечивается постоянство расхода рабочей жидкости через пропорциональный гидрораспределитель 8 при изменении величины нагрузки, например, при изменении момента неуравновешенности. В совокупности с улучшенным позиционированием золотника пропорционального гидрораспределителя 8 повышается стабильность подачи рабочей жидкости в гидродвигатель 6.
Объект управления 7 может иметь значительные нелинейности типа сухое трение и люфты. Для обеспечения стабильных скоростей передвижения объекта управления 7 используется отрицательная обратная связь по скорости, сформированная с помощью датчика относительного положения 13 и дифференцирующего звена 14.
Построение составных частей устройства управления: вычислителей, АЦП, ЦАП и электронных ключей достаточно широко известны и освещены, напимер, в книге «Цифровые измерения. АЦП/ЦАП». Автор Т.С. Рахтор, изд. Техносфера, Москва, 2006.
Заявляемое техническое решение проверено с положительными результатами на стендах АО «ВНИИ»Сигнал» в рамках создания приводов для управления объектов со значительными моментами неуравновешенности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система управления | 2016 |
|
RU2641192C1 |
| Электрогидравлическая система | 2021 |
|
RU2797330C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2347950C1 |
| Электрогидравлическая система управления | 2018 |
|
RU2708004C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ (ВАРИАНТЫ) | 1999 |
|
RU2162551C2 |
| Электрогидравлическая система управления | 2020 |
|
RU2761503C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2004 |
|
RU2272181C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА | 2007 |
|
RU2340520C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2215911C1 |

Система предназначена для управления перемещением различных объектов управления. Система содержит регулируемый насос с регулятором давления, бак, соединенный с всасывающим входом насоса, один или несколько электрогидроприводов, каждый из которых содержит гидродвигатель, кинематически связанный со своим объектом управления, пропорциональный гидрораспределитель с датчиком положения золотника, сумматор, пульт управления, широтно-импульсный модулятор, датчик относительного положения объекта управления, дифференцирующее звено, клапан LS, гидрозамок, причем выход насоса соединен с гидравлическими входами каждого электрогидропривода и далее в каждом электрогидроприводе соединяется с напорным входом пропорционального гидрораспределителя через LS клапан, сливная линия пропорционального гидрораспределителя соединяется со сливной линией электрогидропривода и далее с баком, выходы широтно-импульсного модулятора подключены к управляющим входам пропорционального гидрораспределителя, выход датчика положения золотника гидрораспределителя соединен с первым инвертирующим входом сумматора, выход сумматора соединен с входом широтно импульсного модулятора, выход датчика относительного положения через дифференцирующее звено соединен со вторым инвертирующим входом сумматора, управляющий вход LS клапана через LS каналы пропорционального гидрораспределителя соединен с выходными гидролиниями пропорционального гидрораспределителя, при этом в систему введены дачик давления и устройство управления, вычисляющее необходимое время задержки включения гидрозамка после появления сигнала управления. Технический результат заключается в исключении несанкционированного перемещения объекта управления в начальный период наведения и перенаведения в заданные координаты. 1 з.п. ф-лы, 2 ил.
1. Электрогидравлическая система управления, содержащая регулируемый насос с регулятором давления, бак, соединенный с всасывающим входом насоса, один или несколько электрогидроприводов, каждый из которых содержит гидродвигатель, кинематически связаный со своим объектом управления, пропорциональный гидрораспределитель с датчиком положения золотника, сумматор, пульт управления, широтно-импульсный модулятор, датчик относительного положения объекта управления, дифференцирующее звено, клапан LS, гидрозамок, причем выход насоса соединен с гидравлическими входами каждого электрогидропривода и далее в каждом электрогидроприводе соединяется с напорным входом пропорционального гидрораспределителя через LS клапан, сливная линия пропорционального гидрораспределителя соединяется со сливной линией электрогидропривода и далее с баком, выходы широтно-импульсного модулятора подключены к управляющим входам пропорционального гидрораспределителя, выход датчика положения золотника гидрораспределителя соединен с первым инвертирующим входом сумматора, выход сумматора соединен с входом широтно-импульсного модулятора, выход датчика относительного положения через дифференцирующее звено соединен со вторым инвертирующим входом сумматора, управляющий вход LS клапана через LS каналы пропорционального гидрораспределителя соединен с выходными гидролиниями пропорционального гидрораспределителя, отличающаяся тем, что в нее введены дачик давления и устройство управления, а гидрозамок выполнен электроуправляемым, при этом выход пульта управления соединен с первым входом устройства управления, вход датчика давления подключен к выходу гидродвигателя, выход датчика давления соединен со вторым входом устройства управления, первый выход устройства управления соединен с неинвертирующим входом сумматора, второй выход устройства управления соединен с управляющим входом гидрозамка, а время задержки управляющего сигнала на включение гидрозамка после подачи управляющего сигнала на пропорциональный гидрораспределитель определяется из соотношения:
где Рраб - рабочее давление, измеряемое датчиком давления;
V - объем сжимаемой жидкости;
Е - модуль упругости рабочей жидкости;
Qгр - поток рабочей жидкости через пропорциональный гидрораспределитель, который определяется по величине сигнала пульта управления и расходной характеристике гидрораспределителя.
2. Электрогидравлическая система управления по п. 1, отличающаяся тем, что устройство управления состоит из вычислителя, аналого-цифрового преобразователя, цифроаналогового преобразователя и электронного ключа гидрозамка, причем первый вход устройства управления соединен с первым входом вычислителя, второй вход устройства управления соединен с входом аналого-цифрового преобразователя, выход которого соединен со вторым входом вычислителя, первый выход вычислителя соединен со входом цифроаналогового преобразователя, выход цифроаналогового преобразователя соединен с первым выходом устройства управления, второй выход вычислителя соединен со входом электронного ключа, выход электронного ключа соединен со вторым выходом устройства управления.
| Электрогидравлическая система управления | 2016 |
|
RU2641192C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2347950C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2004 |
|
RU2272181C1 |
| DE 10319484 B4, 03.07.2008 | |||
| US 20150075148 A1, 19.03.2015. | |||

