Изобретение относится к области машиностроительной гидравлики, а именно к системам управления перемещением различных объектов управления.
Известна электрогидравлическая система управления по патенту РФ №2162551 «Электрогидравлическая система управления (варианты)».
Данная электрогидравлическая система управления, принятая за прототип, содержит гидробак, регулируемый насос с регулятором уровня давления, два или более электрогидравлических приводов по количеству объектов управления, причем каждый электрогидравлический привод содержит исполнительный гидродвигатель, кинематически соединенный с объектом управления, пропорциональный гидрораспределитель с LS каналами для возможности измерения давления в полостях гиродвигателя, пульт управления, сумматор, при этом напорная магистраль регулируемого насоса гидравлически соединена со входами электрогидравлических приводов, всасывающая полость насоса и сливные магистрали электрогидравлических приводов соединены с гидробаком.
Регулятор давления регулируемого насоса в прототипе выполнен электрогидравлическим, для которого управляющими воздействиями являются сигналы датчика давления в напорной магистрали насоса и датчика давления в полостях исполнительных гидродвигателей, при чем информация о давлениях в полостях гидродвигателей поступает по LS каналам пропорциональных гидрораспределителей, при этом величина давления в напорной магистрали насоса является величиной переменной и определяется давлением в полостях исполнительного гидродвигателя при его нагрузке, что при различных величинах нагрузок определяет неоднозначность величины сигналов управления для создания заданной скорости объектов управления.
Недостатком вышеуказанной электрогидравлической системы управления является невозможность использования ее для перемещения объектов управления с высокими требованиями к стабильности скорости их перемещения, особенно если объекты управления характеризуются переменной величиной трения, переменными моментами неуравновешенности, в том числе и знакопеременными моментами, а также к объектам управления с люфтами в механических передачах.
В первую очередь стабильность скоростей перемещения объектов с указанными выше нелинейностями определяется наличием и глубиной обратных связей по скоростному контуру. В прототипе таких обратных связей нет, что является его недостатком.
Другим фактором, определяющим стабильность скоростей объекта, является постоянство подачи рабочей жидкости к исполнительному гидродвигателю электрогидравлической системы при изменении величины нагрузки на него. Прототип не обеспечивает такой характеристики.
Еще одним фактором, существенно влияющим на стабильность скоростей объекта управления, является стабильность позиционирования золотников пропорциональных гидрораспределителей, которая в структуре без электрической обратной связи по положению его золотника определяется соотношением усилия возвратной пружины при перемещении золотника пропорционального гидрораспределителя к величине возмущающей силы. Гидродинамические возмущения приводят к отклонению золотника от заданного положения, что сказывается на изменении скорости перемещения объекта управления от заданного значения, что также является недостатком прототипа.
Указанные причины приводят к ограниченному диапазону регулирования скоростей и их недостаточной стабильности при перемещении объектов управления, особенно с минимальной скоростью при изменении параметров объектов управления, таких как неуравновешенность, трение, люфты в соединениях.
Целью заявляемого изобретения является увеличение диапазона регулирования скоростей перемещения объектов управления и повышение стабильности скоростей их перемещения при изменяющихся параметрах в них.
Указанная цель достигается тем, что в электрогидравлическую систему управления, содержащую гидробак, регулируемый насос с регулятором давления, два или более электрогидравлических приводов, каждый из которых включает в себя пропорциональный гидрораспределитель с LS каналами, пульт управления, сумматор, исполнительный гидродвигатель, кинематически соединенный с объектом управления, напорная магистраль регулируемого насоса гидравлически соединена со входами электрогидравлических приводов, всасывающая полость насоса и сливные магистрали электрогидравлических приводов соединены с гидробаком, а в каждый электрогидравлический привод, входящий в электрогидравлическую систему управления, введены широтно-импульсный модулятор (ШИМ), дифференцирующее звено, датчик относительного положения, установленный на объекте управления, датчик положения золотника пропорционального гидрораспределителя, гидрозамок и LS клапан, причем выход пульта управления соединен с неинвертирующим входом сумматора, первый инвертирующий вход которого соединен с выходом датчика положения золотника пропорционального гидрораспределителя, а выход датчика относительного положения объекта управления через дифференцирующее звено соединен со вторым инвертирующим входом сумматора, выход которого соединен с входом ШИМ, выходы которого соединены с управляющими входами пропорционального гидрораспределителя, гидравлический вход электрогидравлического привода через LS клапан гидролинией соединен с первым входом пропорционального гидрораспределителя, сливная гидролиния электрогидравлического привода соединена со вторым входом пропорционального гидрораспределителя, первый и второй выходы пропорционального гидрораспределителя гидравлически соединены через гидрозамок с входами исполнительного гидродвигателя, третий выход пропорционального гидрораспределителя гидролинией соединен с управляющим входом LS клапана.
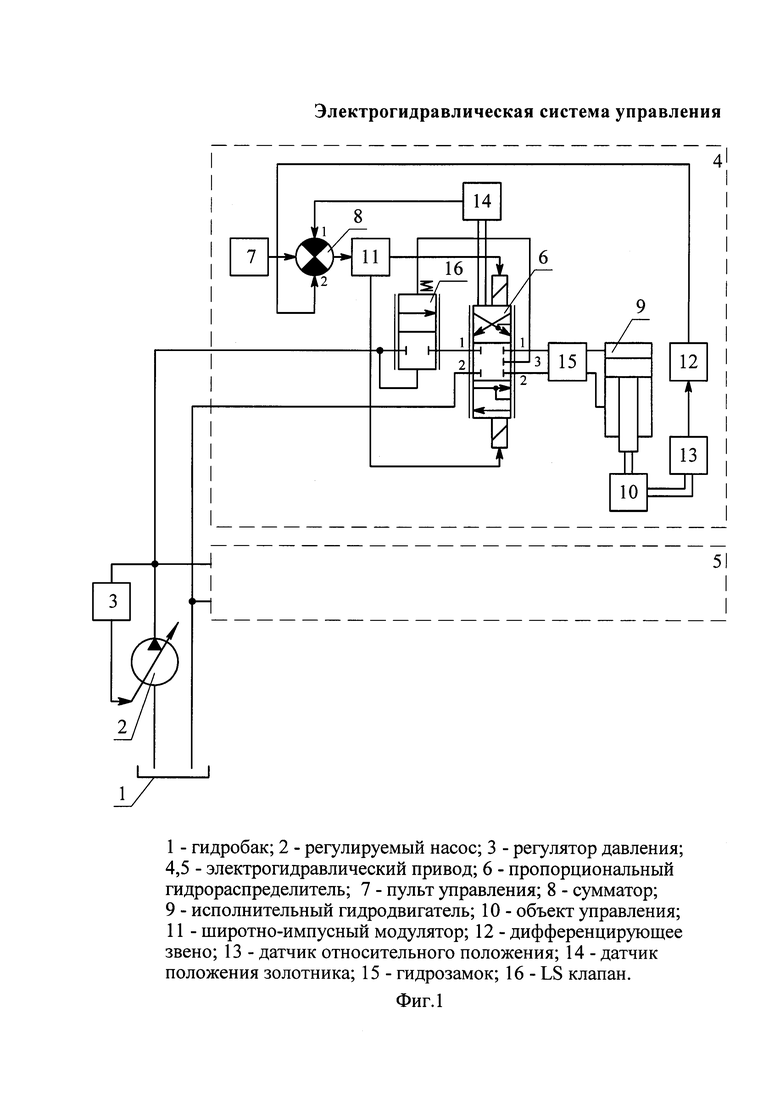
Материалы заявки поясняются графическими материалами, где на фиг. 1 представлена структурно-функциональная схема заявляемой системы; на фиг. 2 представлена расходная характеристика пропорциональных гидрораспределителей.
Электрогидравлическая система управления (фиг 1) содержит, в частном случае, гидробак 1, регулируемый насос 2 с регулятором давления 3, два электрогидравлических привода (ЭГП) 4 и 5, каждый из которых включает в себя пропорциональный гидрораспределитель 6 с LS каналами, пульт управления 7, сумматор 8, исполнительный гидродвигатель 9, кинематически соединенный с объектом управления 10, напорная магистраль регулируемого насоса 2 гидравлически соединена со входами ЭГП 4, 5, всасывающая полость регулируемого насоса 2 и сливные магистрали ЭГП 4, 5 соединены с гидробаком 1, а в каждый ЭГП 4, 5, входящие в электрогидравлическую систему управления, введены ШИМ 11, дифференцирующее звено 12, датчик относительного положения 13, установленный на объекте управления 10, датчик положения золотника 14 пропорционального гидрораспределителя 6, гидрозамок 15 и LS клапан 16, причем выход пульта управления 7 соединен с неинвертирующим входом сумматора 8, первый инвертирующий вход которого соединен с выходом датчика положения золотника 14 пропорционального гидрораспределителя 6, а выход датчика относительного положения 13 объекта управления 10 через дифференцирующее звено 12 соединен со вторым инвертирующим входом сумматора 8, выход которого соединен с входом ШИМ 11, выходы которого соединены с управляющими входами пропорционального гидрораспределителя 6, гидравлический вход электрогидравлического привода через LS клапан 16 гидролинией соединен с первым входом пропорционального гидрораспределителя 6, сливные гидролинии ЭГП 4, 5 соединены со вторым входом пропорционального гидрораспределителя 6, первый и второй выходы пропорционального гидрораспределителя 6 гидравлически соединены через гидрозамок 15 с входами исполнительного гидродвигателя 9, третий выход пропорционального гидрораспределителя 6 гидролинией соединен с управляющим входом LS клапана 16.
Работу электрогидравлической системы управлением рассмотрим на примере функционирования одного ЭГП 4 из ее состава (фиг. 1).
После включении приводного двигателя (не показан), вал которого кинематически связан с валом регулируемого насоса 2, рабочая жидкость по напорной магистрали от регулируемого насоса 2 поступает на вход ЭГП 4 и далее через LS клапан 16 на первый вход пропорционального гидрораспределителя 6, второй вход которого гидролинией соединен со сливной магистралью ЭГП 4 и далее с гидробаком 1.
При поступлении с пульта управления 7 управляющего сигнала на неинвертирующий вход сумматор 8, в котором суммируются сигналы обратных связей с датчика относительного положения 13 объекта управления 10 и датчика положения золотника 14 пропорционального распределителя 6, поступающие соответственно на первый и второй инвертирующие входы сумматора 8, сформированный сигнал с выхода сумматора 8 поступает на вход ШИМ 11 и далее с его выхода на управляющие входы пропорционального гидрораспределителя 6.
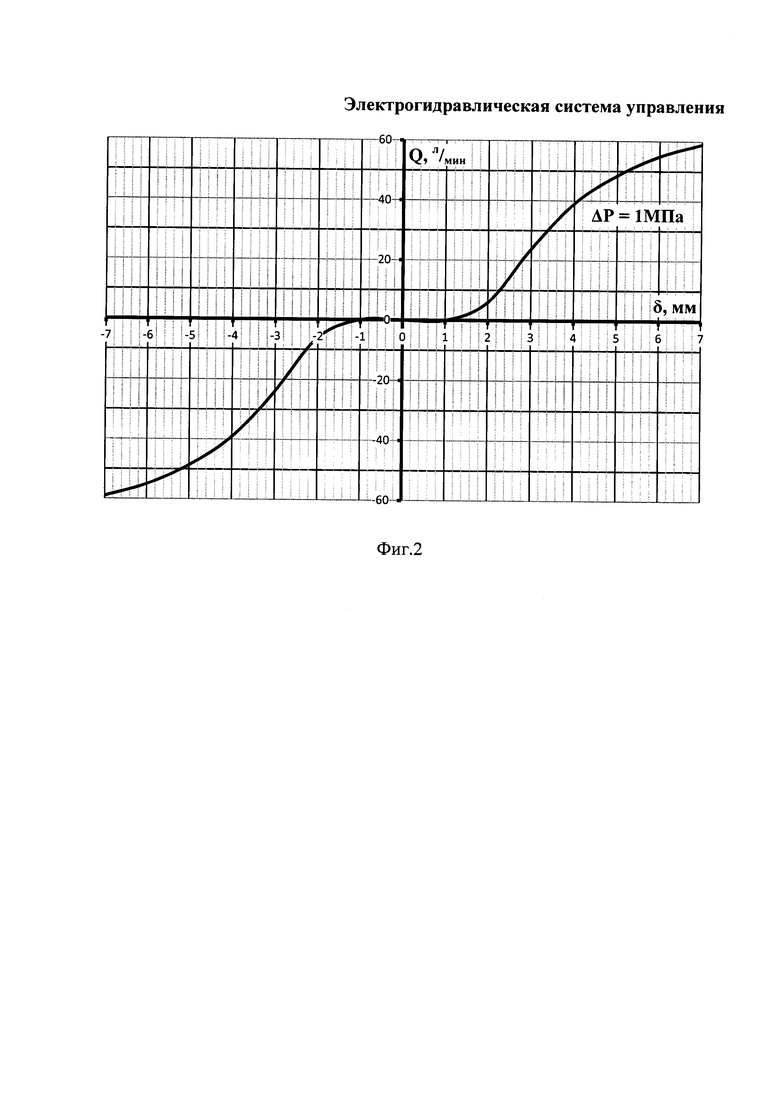
Сигналы с выходов ШИМ 11 вызывают отклонение золотника пропорционального гидрораспределителя 6 и в соответствии с его расходной характеристикой (Фиг 2), рабочая жидкость с первого и второго выходов пропорционального гидрораспределителя 6 (фиг. 1) через гидрозамок 15 поступает в рабочие полости исполнительного гидродвигателя 9, при этом регулируемый насос 2 работает в режиме поддержания постоянного давления, причем уровень поддерживаемого давления меньше давления срабатывания предохранительных клапанов (не показаны) электрогидравлической системы управления, а необходимый расход рабочей жидкости создается регулятором давления 3 «по потребности» за счет изменения отклонения люльки регулируемого насоса 2, то есть при падении давления в напорной магистрали регулируемого насоса 2 регулятор давления 3 увеличивает подачу регулируемого насоса 2, восстанавливая заданное давление, и, наоборот, при повышении давления выше заданного регулятор давления 3 уменьшает подачу регулируемого насоса 2.
В заявляемой электрогидравлической системе управления вариант исполнения регулятора давления 3 описан в каталоге ОАО «Пневмострой-машина», «Регулируемые аксиально-поршневые насосы серии 313», г. Екатеринбург, 2011 г., стр. 20.
Пропорциональный гидрораспределитель 6 для обеспечения как минимальных, так и максимальных скоростей перемещения объектов управления имеет плавно возрастающую расходную характеристику (фиг. 2) в зависимости от перемещения его золотника и с учетом наличия в пропорциональном гидрораспределителе 6 датчика положения его золотника 14 обеспечивается возможность позиционирования золотника в том числе и от величины сигнала управления.
Пропорциональный гидрораспределитель 6 (фиг. 1) имеет LS каналы, каждый из которых при отклонении золотника от нейтрального положения соединяется с его третьим выходом и далее по гидролинии рабочая жидкость поступает на управляющий вход LS клапана 16.
Поступающая рабочая жидкость с входа ЭГП 4 через LS клапан 16 на первый вход пропорционального гидрораспределителя 6 обеспечивает перепад давления на пропорциональном гидрораспределителе 6, близкий к постоянному. Постоянство перепада давления на пропорциональном гидрораспределителе 6 формируется за счет регулирования величины перепада давления на LS клапане 16, на первый вход которого поступает давление с напорной магистрали регулируемого насоса 2, а на второй через LS каналы - давление из полостей исполнительного гидродвигателя 9. В результате обеспечивается постоянство расхода рабочей жидкости через пропорциональный гидрораспределитель 6 при изменении величины нагрузки, прилагаемой к исполнительному гидродвигателю 9, например, при изменении момента неуравновешенности. В совокупности с улучшенным позиционированием золотника пропорционального гидрораспределителя 6 повышается стабильность подачи рабочей жидкости в исполнительный гидродвигатель 9.
Для исключения значительных нелинейностей типа сухое трение и люфты в кинематическом соединении: исполнительный гидродвигатель 9 - объект управления 10, а также для обеспечения стабильности скорости перемещения объекта управления 10 вводится отрицательная обратная связь по скорости, сформированная по сигналу с датчика относительного положения 13, через дифференцирующее звено 12 на второй инвертирующий вход сумматора 8.
Аналогичным образом работают все электрогидравлические приводы из состава электрогидравлической системы управления, их количество определяется количеством объектов управления.
Вариант исполнения сумматора приведен в книге «Электроника». В.Г. Гусев, Ю.М. Гусев, Москва: «Высшая школа», 1991 г., а вариант построения широтно-импульсного модулятора описан в книге «Транзисторная преобразовательная техника». М.: Изд-во «Техносфера», 2005 г.
Заявляемое техническое решение проверено на стендах АО «ВНИИ «Сигнал» с положительными результатами в рамках создания приводов для БМ РСЗО «КАМА».
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система управления | 2018 |
|
RU2708477C1 |
| Электрогидравлическая система | 2021 |
|
RU2797330C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2347950C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2017 |
|
RU2646169C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2688783C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2004 |
|
RU2272181C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ПАКЕТА НАПРАВЛЯЮЩИХ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ | 2011 |
|
RU2503908C2 |
| Электрогидравлическая система управления | 2018 |
|
RU2708004C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ПАКЕТА НАПРАВЛЯЮЩИХ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ | 2009 |
|
RU2387943C1 |
Изобретение относится к области машиностроительной гидравлики, а именно к системам управления перемещением различных объектов управления. Система управления содержит гидробак, регулируемый насос с регулятором давления, два или более электрогидравлических приводов, каждый из которых включает в себя пропорциональный гидрораспределитель с LS каналами, пульт управления, сумматор, исполнительный гидродвигатель и объект управления. В каждый электрогидравлический привод введены широтно-импульсный модулятор, дифференцирующее звено, датчик относительного положения, датчик положения золотника пропорционального гидрораспределителя, гидрозамок и LS клапан. Технический результат - увеличение диапазона регулирования скоростей перемещения объектов управления и повышение стабильности скоростей их перемещения. 2 ил.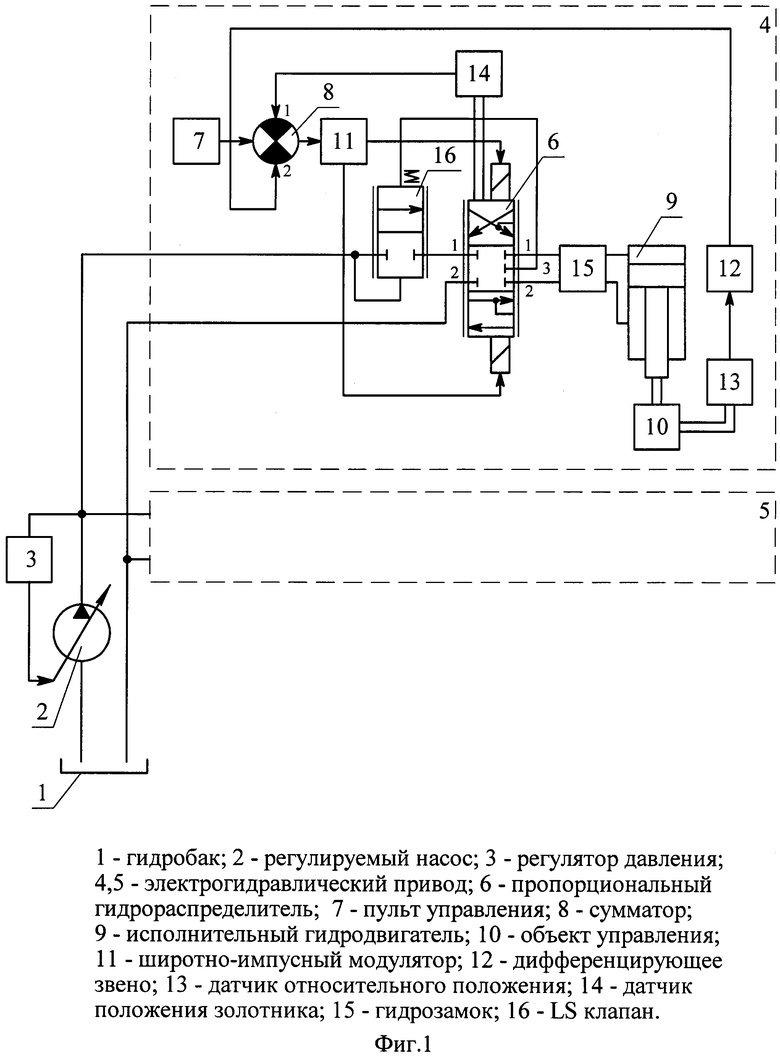
Электрогидравлическая система управления, содержащая гидробак, регулируемый насос с регулятором давления, два или более электрогидравлических приводов, каждый из которых включает в себя пропорциональный гидрораспределитель с LS каналами, пульт управления, сумматор, исполнительный гидродвигатель, кинематически соединенный с объектом управления, напорная магистраль регулируемого насоса гидравлически соединена со входами электрогидравлических приводов, всасывающая полость насоса и сливные магистрали электрогидравлических приводов соединены с гидробаком, отличающаяся тем, что в каждый электрогидравлический привод, входящий в электрогидравлическую систему управления, введены широтно-импульсный модулятор, дифференцирующее звено, датчик относительного положения, установленный на объекте управления, датчик положения золотника пропорционального гидрораспределителя, гидрозамок и LS клапан, причем выход пульта управления соединен с неинвертирующим входом сумматора, первый инвертирующий вход которого соединен с выходом датчика положения золотника пропорционального гидрораспределителя, а выход датчика относительного положения объекта управления через дифференцирующее звено соединен со вторым инвертирующим входом сумматора, выход которого соединен с входом широтно-импульсного модулятора, выходы которого соединены с управляющими входами пропорционального гидрораспределителя, гидравлический вход электрогидравлического привода через LS клапан гидролинией соединен с первым входом пропорционального гидрораспределителя, сливная гидролиния электрогидравлического привода соединена со вторым входом пропорционального гидрораспределителя, первый и второй выходы пропорционального гидрораспределителя гидравлически соединены через гидрозамок с входами исполнительного гидродвигателя, третий выход пропорционального гидрораспределителя гидролинией соединен с управляющим входом LS клапана.
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ (ВАРИАНТЫ) | 1999 |
|
RU2162551C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2004 |
|
RU2272181C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2013 |
|
RU2529965C1 |
| DE 10319484 B4, 03.07.2008 | |||
| US 20150075148 A1, 19.03.2015. | |||

