Изобретение относится к спутниковой навигации и может быть использовано для повышения точности определения вектора состояния космического аппарата-потребителя посредством применения рекуррентных алгоритмов оценивания и использования измерений псевдодальностей между космическим аппаратом-потребителем и навигационными космическими аппаратами рабочего созвездия с числом не менее двух.
Известен способ определения местоположения и составляющих вектора скорости объектов (RU №2115137, G01S 5/00), заключающийся в приеме объектом радионавигационных сигналов спутниковых радионавигационных систем ГЛОНАСС и GPS, а также определении положения и расхождения шкалы времени объекта и системной шкалы времени космических навигационных систем ГЛОНАСС и GPS по набору одновременных измерений. По предлагаемому способу в N-канальном приемном устройстве, один из которых является ведущим, а другие - ведомыми каналами, производят определение разности дальностей между дальностями, измеренными ведомыми каналами, и дальностью, измеренной ведущим каналом, а также определение разностей скоростей изменения дальностей между скоростями изменения дальностей, вычисленными по измерениям доплеровских сдвигов частоты ведомыми каналами, и скоростью изменения дальности, вычисленной по измерению доплеровского сдвига частоты ведущим каналом, затем производят определение двойных разностей дальностей и двойных разностей скоростей изменения дальностей путем взаимного вычитания друг из друга разностей дальностей и разностей скоростей изменения дальностей. Приемное устройство ведущего канала принимает сигналы имитатора спутниковых сигналов.
Недостатком данного способа является то, что для него необходимо использование имитатора спутниковых сигналов, что приведет к усложнению конструкции приемного устройства в части комплектования его имитатором спутниковых сигналов. Кроме того, данный имитатор будет занимать один из каналов приемного устройства. В случае, если вместо имитатора спутниковых сигналов используется реальный навигационный космический аппарат, возникает необходимость построения критерия выбора канала, который будет ведущим. Также для определения положения потребителя необходимо получение измерений минимум по четырем навигационным космическим аппаратам одновременно.
Известен способ определения вектора состояния подвижного объекта (RU №2070315, G01C 21/00), принятый в качестве прототипа. В способе определения вектора состояния подвижного объекта при помощи навигационных космических аппаратов (НКА) космических навигационных систем (КНС), включающем измерение с привязкой ко времени псевдодальностей и доплеровского сдвига частоты по навигационным сигналам НКА, образующих группу НКА в составе КНС с числом НКА не менее трех, на определяемом объекте и эталонном пункте определение псевдодальности до k-го НКА на момент времени ti как суммы псевдодальности, измеренной на момент времени t0 и интеграла от доплеровского сдвига частоты на интервале времени от t0 до ti, определение на эталонном пункте поправки к навигационному параметру НКА, передачу полученной поправки на подвижный объект, определение вектора состояния подвижного объекта с учетом определенных значений псевдодальности, измеренного доплеровского сдвига частоты и поправки к навигационному параметру, дополнительно осуществляют слежение за НКА, образующими одну и ту же группу НКА рабочее созвездие, на эталонном пункте и на подвижном объекте, в группе НКА одновременно наблюдаемых на эталонном пункте и подвижном объекте выбирают один НКА-ведущий, формируют разности псевдодальностей до ведущего НКА и каждого из НКА рабочего созвездия, формируют разности доплеровского сдвига частот по ведущему НКА и каждому из НКА созвездия, формируют по текущим значениям разности псевдодальности с помощью доплеровского сдвига частоты значения разности псевдодальностей на начальный момент времени, определяемый по наличию одного и того же созвездия на эталонном и подвижном пунктах, осредняют на начальный момент приведенные значения разностей псевдодальностей для подвижного пункта, формируют текущие значения вектора состояния подвижного пункта на основе осредненных значений разности псевдодальностей и интеграла от разности доплеровского сдвига частоты на интервале от начального момента времени до момента времени, на который определяются вектор состояния подвижного объекта, при изменении рабочего созвездия НКА общего для подвижного и эталонного пунктов момент смены созвездия принимается за начальный и вновь при движении подвижного объекта с учетом измеренных навигационных параметров формируют осредненное значение разности псевдодальностей, используемое при формировании текущего вектора состояния подвижного объекта, при наличии в рабочем созвездии трех НКА последнее значение высоты, полученное на подвижном объекте путем решения навигационной задачи, запоминается и используется при решении навигационной задачи совместно с текущими значениями параметров, формируемых на основе навигационных измерений, или используется при отсутствии в рабочем созвездии четвертого НКА значение высоты, получаемого от внешнего источника информации, при появлении в рабочем созвездии четвертого НКА полученный на предыдущем интервале вектор состояния подвижного объекта уточняется с учетом решения навигационной задачи на основе информации по четырем, как минимум НКА рабочего созвездия, привязка ко времени навигационных параметров, полученных путем приема от обработки навигационных сигналов НКА, осуществляется путем решения навигационно-временной задачи.
Недостатками прототипа является необходимость использования эталонного пункта, координаты которого должны быть известны с высокой точностью, ограниченная дальность разнесения в пространстве эталонного пункта и подвижного потребителя, определение положения подвижного потребителя методами накопления информации без возможности получения оценки положения потребителя в реальном масштабе времени. Кроме того, для определения положения движущегося потребителя требуется применение дополнительных вычислений.
Целью настоящего изобретения является повышение точности определения вектора состояния космического аппарата-потребителя, упрощение способа определения вектора состояния космического аппарата-потребителя за счет отказа от использования эталонного пункта и определения положения потребителя методами накопления информации.
Указанная цель достигается за счет того, что в способе определения вектора состояния космического аппарата-потребителя по сигналам космических навигационных систем, заключающемся в измерении с привязкой по времени на космическом аппарате-потребителе псевдодальностей по радионавигационным сигналам навигационных космических аппаратов, образующим рабочее созвездие, и формировании разностей псевдодальностей между космическим аппаратом-потребителем и навигационными космическими аппаратами, измерения псевдодальностей проводят между космическим аппаратом-потребителем и навигационными космическими аппаратами рабочего созвездия с числом не менее двух, при этом в моменты отсутствия данных измерений производят прогнозирование вектора состояния космического аппарата-потребителя на основании последнего полученного апостериорного вектора состояния, а в моменты наличия измерений для определения вектора состояния космического аппарата-потребителя используют многоканальный последовательный фильтр Калмана для нелинейных моделей движения и измерения, позволяющий определять вектор состояния космического аппарата по измерениям псевдодальностей между космическим аппаратом-потребителем и навигационными космическими аппаратами рабочего созвездия с числом не менее двух.
Сущность изобретения поясняется чертежами, где на фиг.1 изображена структурная схема нахождения в зоне радиовидимости космического аппарата-потребителя (КА-потребителя) двух навигационных космических аппаратов (НКА) космических навигационных систем рабочего созвездия с числом не менее двух. На фиг.2 изображена функциональная схема одного канала многоканального последовательного фильтра Калмана. На фиг.3 изображена функциональная схема многоканального последовательного фильтра Калмана.
В предлагаемом способе, основанном на измерении псевдодальностей между КА-потребителем и НКА КНС, измерения разности псевдодальностей проводятся между КА-потребителем и НКА рабочего созвездия с числом не менее двух, при этом в моменты отсутствия данных измерений производится прогнозирование вектора состояния космического аппарата-потребителя на основании последнего полученного апостериорного вектора состояния, а в моменты наличия измерений для определения вектора состояния КА-потребителя используется многоканальный последовательный фильтр Калмана для нелинейных моделей движения и измерения, позволяющий определять вектор состояния КА-потребителя по измерениям псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух по формулам













где
Р00=Р0(t0) - априорная ковариационная матрица априорного вектора состояния КА-потребителя на момент времени t0;
q00=q0(t0) - априорный вектор состояния КА-потребителя на момент времени t0;
f(q(t),t) - правая часть уравнений движения КА-потребителя, по которым производится прогнозирование его вектора состояния;
qk-1k-1 - апостериорный вектор состояния КА-потребителя на момент времени tk-1;
q(tk-1) - вектор состояния КА-потребителя на момент времени tk-1;
qkk-1 - прогноз апостериорного вектора состояния КА-потребителя на момент времени tk после обработки всех измерений на моменты времени t0, ..., tk-1;
q(tk) - вектор состояния КА-потребителя на момент времени tk;
Pk-1k-1 - апостериорная ковариационная матрица апостериорного вектора состояния КА-потребителя на момент времени tk-1 после обработки всех измерений на моменты времени t0, ..., tk-1;
 - матрица частных производных от вектора состояния КА-потребителя на момент времени tk по вектору состояния КА-потребителя qk-1k-1 на момент времени tk-1;
- матрица частных производных от вектора состояния КА-потребителя на момент времени tk по вектору состояния КА-потребителя qk-1k-1 на момент времени tk-1;
Pkk-1 - прогноз ковариационной матрицы апостериорного вектора состояния КА-потребителя на момент времени tk после обработки всех измерений на моменты времени t0, ..., tk-1;
s - коэффициент усиления ковариационной матрицы;
Qk - матрица шумов модели движения КА-потребителя;
Р0(tk) - априорная ковариационная матрица априорного вектора состояния КА-потребителя на момент времени tk;
 - априорный вектор состояния КА-потребителя на момент времени tk до начала обработки всех измерений на момент времени tk;
- априорный вектор состояния КА-потребителя на момент времени tk до начала обработки всех измерений на момент времени tk;
 - апостериорный вектор состояния КА-потребителя на момент времени tk после обработки (i-1) измерения;
- апостериорный вектор состояния КА-потребителя на момент времени tk после обработки (i-1) измерения;
 - апостериорный вектор состояния КА-потребителя на момент времени tk после обработки i измерений;
- апостериорный вектор состояния КА-потребителя на момент времени tk после обработки i измерений;
yi(tk), i∈1...M - разности измеренных псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух на момент времени tk;
νi(tk)∈N(0,Ri(tk)), i∈1...M - шум разностей измеренных псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух, гауссовский случайный вектор размерности той же, что и yi(tk), с нулевым математическим ожиданием и ковариационными матрицами Ri(tk) соответственно;
Ri(tk) - ковариационная матрица шума i-й разности измеренных псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух на момент времени tk;
hi(tk,qi-1(tk)) - функция модели измерений, по которой рассчитывается значение измеряемого параметра на основании полученного после обработки i-1 измерения апостериорного вектора состояния космического аппарата-потребителя qi-1(tk);
 - матрица частных производных от функции модели измерения по вектору состояния КА-потребителя;
- матрица частных производных от функции модели измерения по вектору состояния КА-потребителя;
Pi-1(tk) - прогноз ковариационной матрицы апостериорного вектора состояния КА-потребителя на момент времени tk после обработки (i-1) измерения;
Pi(tk) - ковариационная матрица апостериорного вектора состояния КА-потребителя на момент времени tk после обработки i измерений;
 - функция модели измерений, по которой рассчитывается значение измеряемого параметра на основании полученного апостериорного вектора состояния КА-потребителя
- функция модели измерений, по которой рассчитывается значение измеряемого параметра на основании полученного апостериорного вектора состояния КА-потребителя 
М - общее количество разностей измеренных псевдодальностей на момент времени tk;
Рkk - ковариационная матрица оценки вектора состояния КА-потребителя на момент времени tk после обработки всех М измерений;
qkk - апостериорный вектор состояния КА-потребителя на момент времени tk после обработки всех М измерений.
Уравнения (3)-(13) получены следующим образом. Измерения обрабатываются фильтром Калмана, рекуррентным по номеру канала, а не по времени. Уравнения модели движения и модели измерения записываются в следующем виде соответственно:


где
qi-1(tk) - вектор состояния КА-потребителя на момент времени tk после обработки (i-1) измерения;
qi(tk) - вектор состояния КА-потребителя на момент времени tk после обработки i измерений.
Соответствующий фильтр Калмана записывается в следующем виде:




Матрица шумов модели движения Qk представляет собой матрицу с ненулевыми диагональными элементами, соответствующими погрешностям прогнозирования положения КА-потребителя за счет погрешности прогноза вектора состояния КА-потребителя qk-1k-1 на момент времени tk относительно истинного вектора состояния КА-потребителя.
Ковариационные матрицы шумов разностей измеренных псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух, Ri(tk), i∈1...М представляют собой матрицы размерности 1*1, в которых находится величина, равная априорной дисперсии шума разностей измеренных псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух.
Матрица частных производных Фkk-1 от вектора состояния КА-потребителя q(tk) на момент времени tk по вектору состояния КА-потребителя q(tk-1) на момент времени tk-1 уравнений модели движения (3) рассчитывается по формуле

Матрица частных производных Hi(tk) от функции модели измерений по априорному вектору состояния КА-потребителя qi(tk) после обработки i измерений на момент времени tk рассчитывается по формуле

Таким образом, в каждый момент времени вектор состояния последовательно уточняется по всем М каналам, где каждый канал соответствует измерению разности псевдодальности между КА-потребителем и НКА рабочего созвездия с числом не менее двух. При таком подходе априорный вектор состояния КА-потребителя q0(tk)=qkk-1 является спрогнозированным значением с предыдущего шага:


Апостериорный вектор состояния КА-потребителя qkk на момент времени tk получается как результат работы фильтра Калмана, рекуррентного по каналам после обработки всех разностей измеренных псевдодальностей на момент времени tk:
qkk=qM(tk),
а соответствующая ковариационная матрица апостериорного вектора состояния КА-потребителя записывается в следующем виде:
Pkk=PM(tk).
В качестве априорного вектора состояния КА-потребителя выступает вектор состояния КА-потребителя, полученный путем решения задачи определения положения потребителя (Сетевые спутниковые радионавигационные системы / Шебшаевич B.C., Дмитриев П.П., Иванцевич Н.В. и др.; Под ред. B.C. Шебшаевича. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1993. - 408 с.: ил., стр 235-240) при нахождении в зоне радиовидимости навигационной аппаратуры потребителя, установленной на КА-потребителе, НКА рабочего созвездия с числом не менее одного.
Количество сформированных разностей измеренных псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух, подаваемых на вход фильтра, напрямую зависит от количества НКА рабочего созвездия с числом не менее двух, по которым проводятся измерения, и определяется по формуле  где N - количество НКА рабочего созвездия с числом не менее двух. Следовательно, формируемый вектор измеряемых параметров будет иметь размерность, которая будет изменяться между моментами времени. Например, количество радиовидимых навигационных космических аппаратов ГЛОНАСС может достигать 8, а количество навигационных космических аппаратов GPS 12, поэтому сформированный вектор разностей измеренных псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух будет иметь размерность от 1 до 190.
где N - количество НКА рабочего созвездия с числом не менее двух. Следовательно, формируемый вектор измеряемых параметров будет иметь размерность, которая будет изменяться между моментами времени. Например, количество радиовидимых навигационных космических аппаратов ГЛОНАСС может достигать 8, а количество навигационных космических аппаратов GPS 12, поэтому сформированный вектор разностей измеренных псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух будет иметь размерность от 1 до 190.
На фиг.1 изображена структурная схема нахождения в зоне радиовидимости КА-потребителя двух НКА КНС. КА-потребитель и НКА аппараты при этом находятся по разные стороны Земли, а высота полета КА-потребителя превышает высоту полета НКА. Одновременно видимые с КА-потребителя НКА находятся внутри конической поверхности, определяемой максимальным αMAX и αMIN минимальным надирным углом приемной антенны навигационной аппаратуры, установленной на КА-потребителе, т.е. углом между направлениями на НКА и на центр Земли, или максимальной Н и минимальной h высотами радиолинии. Минимальная высота радиолинии определяется исходя из необходимости отсутствия искажений навигационного сигнала из-за прохождения через тропосферу и ионосферу. Для уменьшения влияния тропосферных и ионосферных задержек с учетом необходимости обеспечения достаточного количества радиовидимых НКА наиболее надежной является минимальная высота радиолинии порядка 1000 км, так как на данной высоте над поверхностью Земли практически не происходит искажения навигационного сигнала за счет прохождения через тропосферу и ионосферу.
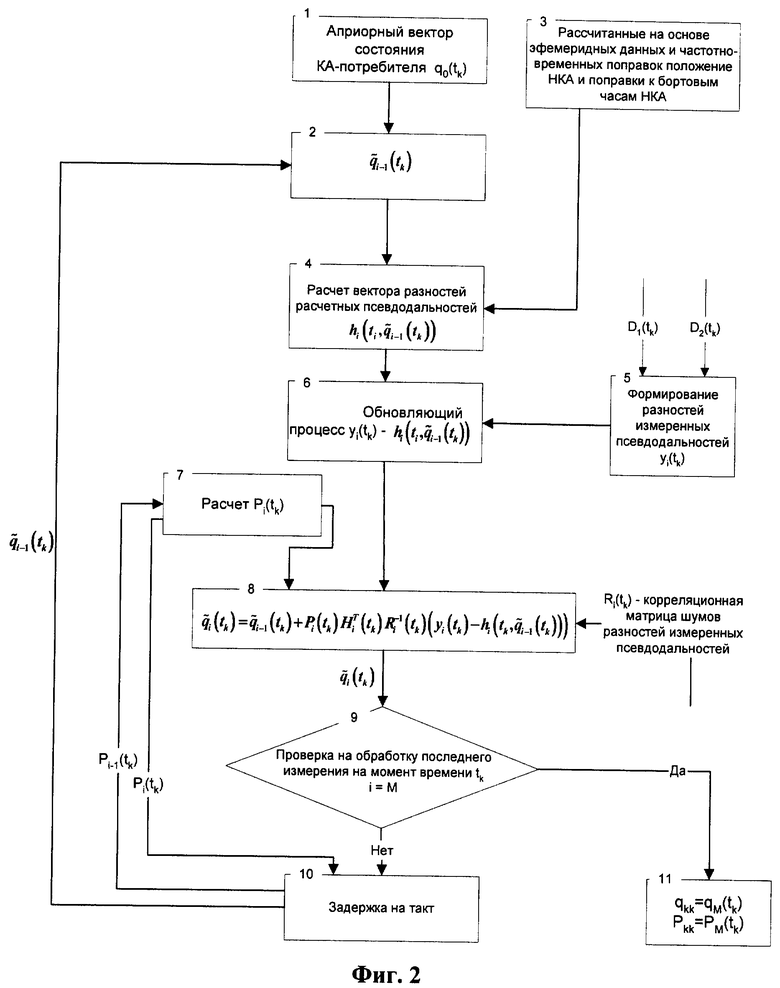
На фиг.2 изображена функциональная схема одного канала многоканального последовательного фильтра Калмана. В соответствии с функциональной схемой сначала производится расчет априорного вектора состояния КА-потребителя q0(tk) на основании априорных данных (оператор 1). По апостериорному вектору состояния КА-потребителя  полученной после обработки (i-1) измерений, производится расчет априорного вектора состояния КА-потребителя на i-й шаг (оператор 2). Из массива рассчитанных на основании эфемеридных данных и частотно-временных поправок, принятых в составе навигационного сообщения НКА, векторов состояния НКА и поправок к бортовым часам НКА выбираются вектора состояния, соответствующие обрабатываемым измерениям псевдодальности между КА-потребителем и НКА рабочего созвездия с числом не менее двух (оператор 3). На основании априорного вектора состояния КА-потребителя
полученной после обработки (i-1) измерений, производится расчет априорного вектора состояния КА-потребителя на i-й шаг (оператор 2). Из массива рассчитанных на основании эфемеридных данных и частотно-временных поправок, принятых в составе навигационного сообщения НКА, векторов состояния НКА и поправок к бортовым часам НКА выбираются вектора состояния, соответствующие обрабатываемым измерениям псевдодальности между КА-потребителем и НКА рабочего созвездия с числом не менее двух (оператор 3). На основании априорного вектора состояния КА-потребителя  векторов состояния НКА и поправок к бортовым часам НКА производится вычисление разности расчетных псевдодальностей
векторов состояния НКА и поправок к бортовым часам НКА производится вычисление разности расчетных псевдодальностей  между КА-потребителем и НКА (оператор 4). По полученным измеренным псевдодальностям между КА-потребителем и НКА формируется разность измеренных псевдодальностей yi(tk) (оператор 5). По полученным разностям расчетных и измеренных псевдодальностей формируется обновляющий процесс - разность разностей расчетных и разностей измеренных псевдодальностей (оператор 6). По полученной на предыдущем шаге ковариационной матрице Pi-1(tk) априорного вектора состояния КА-потребителя рассчитывается ковариационная матрица Pi(tk) на текущий шаг обработки измерений (оператор 7). По рассчитанной ковариационной матрице Рi(tk) и по полученному обновляющему процессу и по ковариационной матрице Ri(tk) шумов разностей измеренных псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух производят расчет апостериорного вектора состояния КА-потребителя
между КА-потребителем и НКА (оператор 4). По полученным измеренным псевдодальностям между КА-потребителем и НКА формируется разность измеренных псевдодальностей yi(tk) (оператор 5). По полученным разностям расчетных и измеренных псевдодальностей формируется обновляющий процесс - разность разностей расчетных и разностей измеренных псевдодальностей (оператор 6). По полученной на предыдущем шаге ковариационной матрице Pi-1(tk) априорного вектора состояния КА-потребителя рассчитывается ковариационная матрица Pi(tk) на текущий шаг обработки измерений (оператор 7). По рассчитанной ковариационной матрице Рi(tk) и по полученному обновляющему процессу и по ковариационной матрице Ri(tk) шумов разностей измеренных псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух производят расчет апостериорного вектора состояния КА-потребителя  после обработки i измерений на момент времени tk (оператор 8). Проверяется условие обработки последнего измерения на данный момент времени (оператор 9). Если условие не выполнено, то полученные апостериорный вектор состояния КА-потребителя и ковариационная матрица апостериорного вектора состояния КА-потребителя выступают в качестве априорного вектора состояния космического аппарата-потребителя и в качестве априорной ковариационной матрицы вектора состояния космического аппарата-потребителя при обработке следующей пары измерений псевдодальности между космическим аппаратом и навигационными космическими аппаратами рабочего созвездия с числом не менее двух (оператор 10). В противном случае полученный апостериорный вектор состояния космического аппарата-потребителя
после обработки i измерений на момент времени tk (оператор 8). Проверяется условие обработки последнего измерения на данный момент времени (оператор 9). Если условие не выполнено, то полученные апостериорный вектор состояния КА-потребителя и ковариационная матрица апостериорного вектора состояния КА-потребителя выступают в качестве априорного вектора состояния космического аппарата-потребителя и в качестве априорной ковариационной матрицы вектора состояния космического аппарата-потребителя при обработке следующей пары измерений псевдодальности между космическим аппаратом и навигационными космическими аппаратами рабочего созвездия с числом не менее двух (оператор 10). В противном случае полученный апостериорный вектор состояния космического аппарата-потребителя  и ковариационная матрица РM(tk) выступают в качестве исходных данных для дальнейшего расчета априорного вектора состояния космического аппарата-потребителя на следующий момент времени tk+1 (оператор 11).
и ковариационная матрица РM(tk) выступают в качестве исходных данных для дальнейшего расчета априорного вектора состояния космического аппарата-потребителя на следующий момент времени tk+1 (оператор 11).
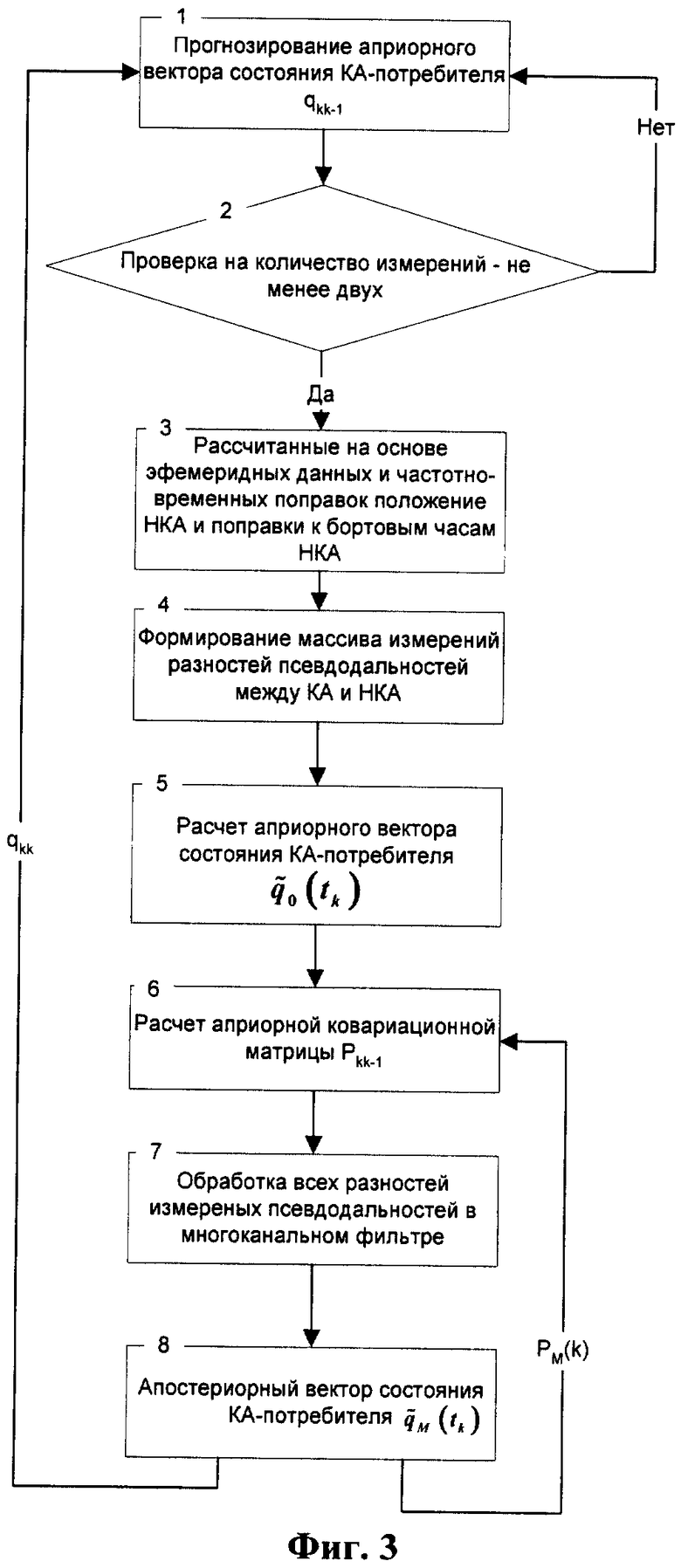
На фиг.3 изображена функциональная схема многоканального последовательного фильтра Калмана. В соответствии с данной функциональной схемой производится расчет априорного вектора состояния КА-потребителя qkk-1 (оператор 1). По количеству проводимых измерений производится проверка на наличие в рабочем созвездии не менее двух НКА на момент времени tk (оператор 2). На основании полученных с навигационных космических аппаратов эфемеридных данных и частотно-временных поправок производится расчет векторов состояния навигационных космических аппаратов и поправок к бортовым часам навигационных космических аппаратов, по которым проводятся измерения псевдодальности (оператор 3). Формируется массив разностей измеренных псевдодальности между космическим аппаратом и навигационными космическими аппаратами рабочего созвездия с числом не менее двух (оператор 4). Производится расчет априорного вектора состояния КА-потребителя  на момент времени tk (оператор 5). Производится расчет априорной ковариационной матрицы P0(tk) априорного вектора состояния КА-потребителя
на момент времени tk (оператор 5). Производится расчет априорной ковариационной матрицы P0(tk) априорного вектора состояния КА-потребителя  (оператор 6). Сформированный массив разностей измеренных псевдодальностей обрабатывается в многоканальном последовательном фильтре Калмана (оператор 7). Полученные после обработки всех разностей измеренных псевдодальностей апостериорный вектор состояния КА-потребителя
(оператор 6). Сформированный массив разностей измеренных псевдодальностей обрабатывается в многоканальном последовательном фильтре Калмана (оператор 7). Полученные после обработки всех разностей измеренных псевдодальностей апостериорный вектор состояния КА-потребителя  и апостериорная ковариационная матрица вектора состояния КА-потребителя
и апостериорная ковариационная матрица вектора состояния КА-потребителя  используются в дальнейшем для расчета априорного вектора состояния КА-потребителя и априорной ковариационной матрицы на следующие моменты времени (оператор 8).
используются в дальнейшем для расчета априорного вектора состояния КА-потребителя и априорной ковариационной матрицы на следующие моменты времени (оператор 8).
Технический эффект достигается за счет того, что по полученным на один момент времени измерениям псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух производится формирование массива, состоящего из разностей измеренных псевдодальностей. По полученным разностям измеренных псевдодальностей производится расчет положения КА-потребителя. Определение вектора состояния производится в многоканальном последовательном фильтре Калмана для нелинейных моделей движения и измерения, при этом в качестве вектора уточняемых параметров берется априорный вектор состояния КА-потребителя, в качестве вектора измеряемых параметров берется вектор, состоящий из разности измерений псевдодальностей между КА-потребителем и НКА рабочего созвездия с числом не менее двух.
При практической реализации данного метода появляется возможность отказаться от использования фильтров с динамически изменяющейся размерностью вектора измерений, а также уменьшить размерность ковариационной матрицы шумов измерений, что позволит уменьшить количество необходимых расчетов, избежать вычислительных погрешностей при работе фильтра в составе программного обеспечения навигационной аппаратуры потребителя, установленной на КА-потребителе. Также появляется возможность определения положения КА-потребителя в рамках разрывного навигационного поля в автономном режиме, при этом минимально необходимое количество НКА, по измерениям разности псевдодальностей до которых производится определение вектора состояния КА-потребителя, уменьшается до двух. В моменты времени, когда измерения навигационных параметров не проводятся, производится прогнозирование положения КА-потребителя.
Например, при нахождении в составе спутниковой радионавигационной системы ГЛОНАСС 14 рабочих навигационных космических аппаратов (состояние системы на 2006 год) в зоне радиовидимости космического аппарата-потребителя на геостационарной орбите 33% времени нет ни одного навигационного космического аппарата, 67% времени находится один навигационный космический аппарат, 23% времени - два навигационных космических аппарата, 5% - три навигационных космических аппарата и 1,5% - четыре навигационных космических аппарата. Предлагаемый способ увеличит длительность интервала времени, в течение которого производятся измерения навигационных параметров и осуществляется навигация космического аппарата-потребителя на геостационарной орбите по сигналам радионавигационных систем, в 5-20 раз при работе по спутниковой радионавигационной системе ГЛОНАСС по сравнению с известными способами навигации потребителя (Сетевые спутниковые радионавигационные системы / Шебшаевич B.C., Дмитриев П.П., Иванцевич Н.В. и др.; Под ред. B.C. Шебшаевича. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1993. - 408 с.: ил.), при этом во время отсутствия измерений положение космического аппарата-потребителя на геостационарной орбите прогнозируется по последней полученной оценке.
Изобретение относится к спутниковой навигации и может быть использовано для повышения точности определения вектора состояния космических аппаратов. Сущность заявленного способа состоит в том, что измерения псевдодальностей проводятся между космическим аппаратом-потребителем и навигационными космическими аппаратами рабочего созвездия с числом не менее двух, при этом в моменты отсутствия данных измерений производится прогнозирование вектора состояния космического аппарата-потребителя на основании последней полученной оценки положения, а в моменты наличия измерений для определения положения космического аппарата используется многоканальный последовательный фильтр Калмана для нелинейных моделей движения и измерения, позволяющий определять положение космического аппарата-потребителя по измерениям псевдодальностей между космическим аппаратом-потребителем и навигационными космическими аппаратами рабочего созвездия с числом не менее двух. Достигаемым техническим результатом является повышение точности, при одновременном упрощении, определения вектора состояния космического аппарата-потребителя. 3 ил.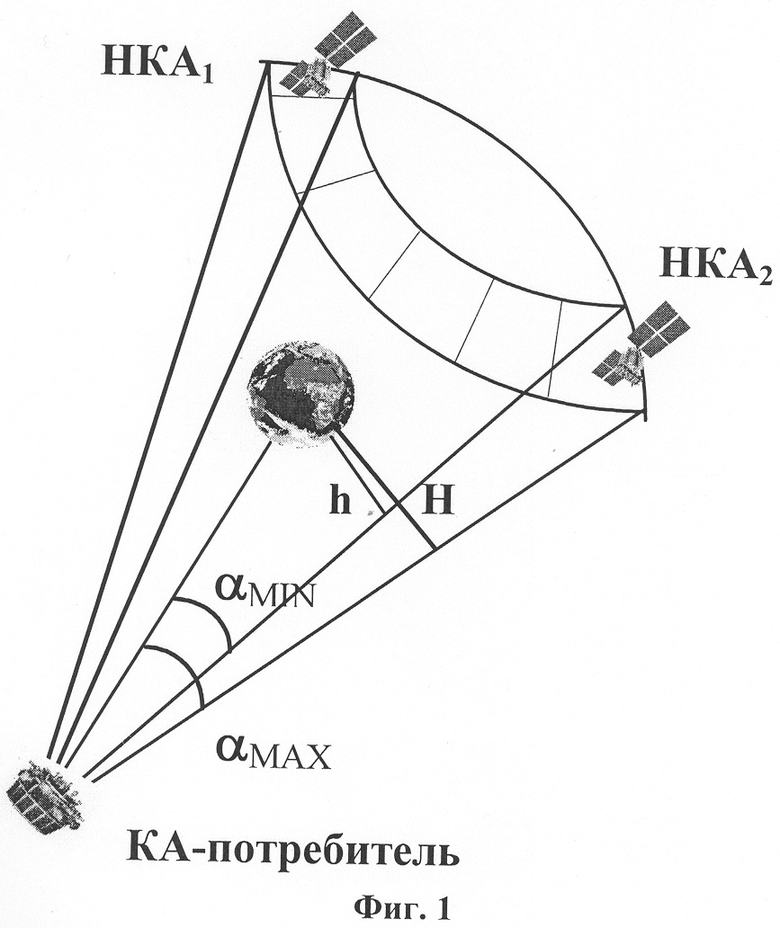
Способ определения вектора состояния космического аппарата по сигналам космических навигационных систем, заключающийся в измерении с привязкой по времени на космическом аппарате псевдодальностей по радионавигационным сигналам навигационных космических аппаратов, образующим рабочее созвездие, и формировании разностей псевдодальностей между космическим аппаратом и навигационными космическими аппаратами, отличающийся тем, что измерения псевдодальностей проводят между космическим аппаратом и навигационными космическими аппаратами рабочего созвездия с числом не менее двух, при этом в моменты отсутствия данных измерений производят прогнозирование вектора состояния космического аппарата на основании последнего полученного апостериорного вектора состояния, а в моменты наличия измерений для определения вектора состояния космического аппарата используют многоканальный последовательный фильтр Калмана для нелинейных моделей движения и измерения, позволяющий определять вектор состояния космического аппарата по измерениям псевдодальностей между космическим аппаратом и навигационными космическими аппаратами рабочего созвездия с числом не менее двух по формулам


i∈1...M,


где  - априорный вектор состояния космического аппарата-потребителя на момент времени tk до начала обработки всех измерений на момент времени tk;
- априорный вектор состояния космического аппарата-потребителя на момент времени tk до начала обработки всех измерений на момент времени tk;
qkk-1 - прогноз вектора состояния космического аппарата-потребителя на момент времени tk после обработки всех измерений на моменты времени t0, ..., tk-1;
P0(tk) - априорная ковариационная матрица априорного вектора состояния системы на момент времени tk;
Pkk-1 - прогноз ковариационной матрицы апостериорного вектора состояния
КА-потребителя на момент времени tk после обработки всех измерений на моменты времени t0, ..., tk-1;
Pi(tk) - ковариационная матрица апостериорного вектора состояния космического аппарата-потребителя на момент времени tk после обработки i измерений;
Pi-1(tk) - прогноз ковариационной матрицы априорного вектора состояния космического аппарата-потребителя на момент времени tk после обработки (i-1) измерения;
 - матрица частных производных от функции модели измерения по вектору состояния космического аппарата-потребителя на момент времени tk после обработки (i-1) измерения;
- матрица частных производных от функции модели измерения по вектору состояния космического аппарата-потребителя на момент времени tk после обработки (i-1) измерения;
Ri(tk) - ковариационная матрица шума i-й разности измеренных псевдодальностей между космическим аппаратом-потребителем и навигационными космическими аппаратами рабочего созвездия с числом не менее двух на момент времени tk;
 - апостериорный вектор состояния космического аппарата-потребителя на момент времени tk после обработки i измерений;
- апостериорный вектор состояния космического аппарата-потребителя на момент времени tk после обработки i измерений;
 - априорный вектор состояния космического аппарата-потребителя на момент времени tk после обработки (i-1) измерения;
- априорный вектор состояния космического аппарата-потребителя на момент времени tk после обработки (i-1) измерения;
уi(tk), i∈1...M - разности измеренных псевдодальностей между космическим аппаратом-потребителем и навигационными космическими аппаратами рабочего созвездия с числом не менее двух на момент времени tk;
 - функция модели измерений, по которой рассчитывается значение измеряемого параметра на основании полученного после обработки i-1 измерения апостериорного вектора состояния космического аппарата-потребителя
- функция модели измерений, по которой рассчитывается значение измеряемого параметра на основании полученного после обработки i-1 измерения апостериорного вектора состояния космического аппарата-потребителя 
Pi(tk), i∈1...M - ковариационная матрица апостериорного вектора состояния космического аппарата-потребителя на момент времени tk после обработки i измерений;
М - общее количество измерений разности псевдодальностей на момент времени tk;
qkk - апостериорный вектор состояния космического аппарата-потребителя на момент времени tk после обработки всех М измерений;
 - апостериорный вектор состояния космического аппарата-потребителя на момент времени tk после обработки М измерений;
- апостериорный вектор состояния космического аппарата-потребителя на момент времени tk после обработки М измерений;
Pkk - ковариационная матрица апостериорного вектора состояния космического аппарата-потребителя на момент времени tk после обработки всех М измерений;
РM(tk) - ковариационная матрица апостериорного вектора состояния космического аппарата-потребителя на момент времени tk после обработки М измерений.
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА СОСТОЯНИЯ ПОДВИЖНОГО ОБЪЕКТА ПРИ ПОМОЩИ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ КОСМИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 1994 |
|
RU2070315C1 |
| RU 94018148 A1, 20.03.1996 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА СОСТОЯНИЯ ПОДВИЖНОГО ОБЪЕКТА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ С ИСПОЛЬЗОВАНИЕМ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ КОСМИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 1996 |
|
RU2095757C1 |
| US 5198822 A, 30.03.1993 | |||
| US 6089508 A, 18.07.2000 | |||
| US 5296861 A, 22.03.1994. | |||

