Изобретение относится к навигации и может быть широко применено в технике для решения задач по определению с высокой точностью вектора состояния подвижных объектов с использованием навигационных космических аппаратов, входящих в состав космической навигационной системы NAVSTAR и ГЛОНАСС.
Известно устройство для индикации местонахождения движущегося автомобиля, содержащее схему, определяющую направление радиоволн, передаваемых из стационарных пунктов, схему, определяющую в координатах X-Y положение и направление движения автомобиля в текущий момент и запоминающую вычисленные данные о местоположении с непрерывным их обновлением. Выходные данные этих схем обрабатываются в центральном процессоре и выводятся на экран индикатора, на котором предварительно сформировано изображение карты района нахождения автомобиля. При вводе данных в индикатор из процессора в изображении карты района передвижения автомобиля индицируется его местоположение, направление движения и положение стационарного пункта. (Заявка Японии N 57-163527, МПК 5 G 01 C 21/00, G 08 G 1/133, с приоритетом от 82.09.20).
Известна система, непрерывно вычисляющая положение движущегося объекта, например автомобиля, содержащая устройство обработки сигналов с датчиков пройденного расстояния, направления и определения координат местонахождения автомобиля на экране дисплея, схему, передающую и принимающую по радиосвязи данные об изменении изображения на экране дисплея в зависимости от местонахождения автомобиля. Система имеет возможность определять и выводить на экран дисплея данные о местоположении автомобиля, находящегося на одном участке с первым автомобилем. Система также содержит блок с носителем информации, например микропленки, содержащей картографические данные с номерами карт. (Заявка Японии N 57-163528, МПК 5 G 01 C 21/00, G 08 G 1/133, с приоритетом от 82.09.20).
Одним из основных недостатков, характерным для известных устройств, является невысокая точность определения местоположения подвижного объекта, достигающая сотен метров.
Наиболее близким к изобретению по технической сущности и достигаемому результату при использовании является способ определения вектора состояния подвижного объекта при помощи навигационного космического аппарата космической навигационной системы, включающей измерения с привязкой по времени навигационных параметров (псевдодальности и допплеровского сдвига частоты несущей) по навигационным сигналам навигационных космических аппаратов, образующих рабочее созвездие в составе космической навигационной системы с числом навигационных космических аппаратов не менее трех для подвижного объекта и эталонного пункта, формирование кадра передаваемой информации, включающего величины псевдодальности и допплеровских сдвигов частоты несущей по всем навигационным космическим аппаратам из рабочего созвездия и его передачу, коррекцию навигационных параметров подвижного объекта и определение вектора состояния подвижного объекта с учетом скорректированных навигационных параметров. (Earl G. Blackwell. Overview of Differential GPS Methods. Global Position System (Paper pablished in Navigation), v. 3, 1986, p.89-100).
Данный способ позволяет значительно повысить точность определения координат местоположения подвижного объекта (порядка единиц метров). Однако он предполагает наличие большого объема данных, передаваемый по линии связи, что ограничивает число подвижных объектов, обслуживаемых одним эталонным пунктом.
Технический результат, достигаемый при осуществлении данного изобретения, заключается в устранении вышеперечисленных недостатков, присущих известным техническим решениям, т.е. при использовании данного изобретения уменьшается нагрузка на канал связи, а следовательно, увеличивается количество подвижных объектов, которые может обслужить один эталонный пункт, при сохранении точности местоопределения. При этом на эталонном пункте можно отслеживать не все навигационные космические аппараты, информация о которых принята навигационной аппаратурой пользователя в обработку.
Сущность изобретения заключается в том, что в известном способе определения вектора состояния подвижного объекта в реальном масштабе времени с использованием навигационных космических аппаратов космической навигационной системы, включающем измерения с привязкой ко времени навигационных параметров: псевдодальностей и допплеровского сдвига частоты несущей по навигационным сигналам навигационных космических аппаратов, образующих рабочее созвездие в составе космической навигационной системы с числом навигационных космических аппаратов более трех, для подвижного объекта и эталонного пункта, вычисление поправок навигационных параметров, формирование кадра, включающего величины псевдодальностей и допплеровских сдвигов частоты несущей по всем навигационным космическим аппаратам из рабочего созвездия и его передачу, коррекцию навигационных параметров подвижного объекта и определение вектора состояния подвижного объекта по скорректированным навигационным параметрам, при этом кадр информации, передаваемый с подвижного объекта, содержит определенный автономно его вектор состояния и навигационные параметры, причем каждый навигационный параметр формируют в виде
НП N • D + Д,
где N целое число,
Д домер, находится в диапазоне от 0 до D,
D интервал, выбирается из диапазона от 0 до 6 априорных СКО.
Для измерения псевдодальности априорная СКО (Sn) вычисляется по формуле ,
,
где Sинстр СКО аппаратных шумов измерения,
Sзаш СКО эффекта искусственного зашумления навигационного сигнала,
Sион СКО ошибки, вызванной распространением сигнала в ионосфере,
Sтроп СКО ошибки, вызванной распространением сигнала в тропосфере,
Sэфем СКО ошибки определения местоположения навигационного космического аппарата наземным комплексом слежения.
Для измерения Допплеровского сдвига априорная СКО Sд вычисляется по формуле ,
,
где Sинстр СКО аппаратных шумов измерения,
Sзаш СКО эффекта искусственного зашумления навигационного сигнала,
Sион СКО ошибки, вызванной распространением сигнала в ионосфере,
Sтроп СКО ошибки, вызванной распространением сигнала в тропосфере,
Sэфем СКО ошибки определения местоположения навигационного космического аппарата наземным комплексом слежения.
Sскор СКО ошибки определения радиальной скорости для подвижного объекта, движущегося объекта, движущегося со скоростью от 0 до 800 метров в секунду.
На эталонном пункте выбирают рабочее созвездие из навигационных космических аппаратов, одновременно отслеживаемых на подвижном объекте и эталонном пункте, с числом не менее трех, по вектору состояния подвижного объекта и навигационных космических аппаратов на эталонном пункте вычисляют оценки навигационных параметров по каждому из навигационных космических аппаратов, находят целое число интервалов D, содержащихся в оценке навигационного параметра, восстанавливают навигационный параметр как сумму домера, полученного с подвижного объекта и произведения целого числа N на величину интервала D и по ним определяют вектор состояния подвижного объекта.
На фиг. 1 схематично иллюстрируется система, реализующая способ по данному изобретению.
Система определения вектора состояния подвижного объекта содержит: эталонный пункт 1, компьютер 2, GPS приемник эталонного пункта 3, радиомодем 4, УКВ приемопередатчик 5, подвижный объект 6, GPS приемник подвижного объекта 7, УКВ приемопередатчик 8, созвездие космических аппаратов 9.
Способ реализуется следующим образом:
На подвижном объекте:
измеряются псевдодальности и допплеровский сдвиг частоты несущей по навигационным сигналам всех навигационных космических аппаратов, которые сопровождались навигационной аппаратурой пользователя на текущий момент,
определяется вектор состояния подвижного объекта по измеренным навигационным параметрам,
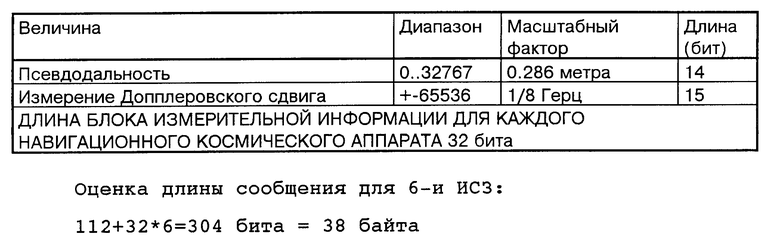
формируется кадр передаваемой информации.
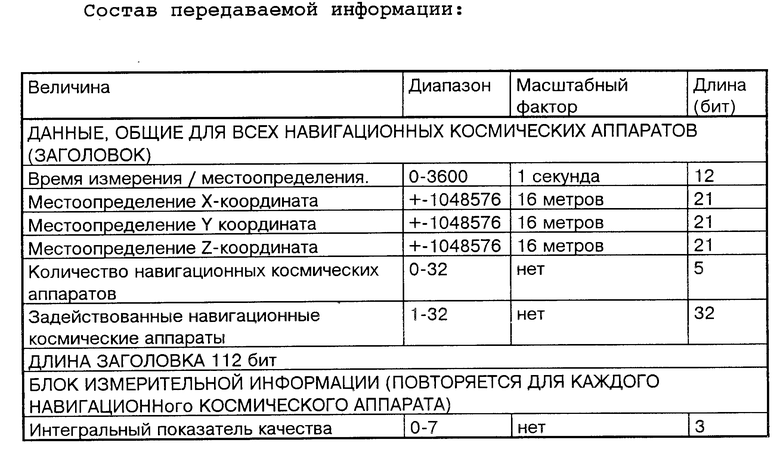
Состав передаваемой информации:
На эталонном пункте:
измеряются псевдодальности и допплеровский сдвиг частоты несущей по навигационным сигналам всех навигационных космических аппаратов, которые сопровождались навигационной аппаратурой пользователя на текущий момент,
при получении информации с подвижного объекта формируется рабочее созвездие из навигационных космических аппаратов, одновременно отслеживаемых на подвижном объекте и эталонном пункте, с числом навигационных космических аппаратов не менее трех,
вычисляются дальности и скорости взаимного сближения по навигационным космическим аппаратам, входящим в рабочее созвездие на момент времени, переданный в кадре,
по вектору состояния подвижного объекта и навигационных космических аппаратов осуществляют оценку навигационных параметров по каждому из навигационных космических аппаратов, находят целое число N интервалов D, содержащихся в оценке навигационного параметра,
восстанавливают навигационный параметр как сумму домера, полученного с подвижного объекта и произведения целого числа N на величину интервала D,
формируются поправки по навигационным параметрам,
вычисляется скорректированный вектор состояния подвижного объекта по следующим выражениям:
Xп(ti) Xп(ti) dX(ti), ,
,
где Xп(ti) оценка скорректированного вектора положения подвижного объекта на момент времени ti;
Xп(ti) вектор положения подвижного объекта, полученный на момент времени ti в результате решения навигационной задачи в навигационной аппаратуре пользователя;
dX(ti) вектор дифференциальной коррекции координат подвижного объекта;
Hп(ti) градиентная матрица, рассчитываемая с учетом координат подвижного объекта;
P(ti) весовая матрица;
dDR(ti) вектор дифференциальной коррекции разностей псевдодальностей, измеренных на подвижном объекте.
Выражения для вычисления вектора дифференциальной коррекции разностей псевдодальностей, измеренных на подвижном объекте:
dDRk(ti) (PRkэ(ti) Rkэ(ti)) (PRkп(ti) Rkп(ti)) (7)
k 1, 2, 3
dXk(ti) Xk(ti) Xр, (9)
dYk(ti) Yk(ti) Yр,
dZk(ti) Zk(ti) Zр,
где PRk(ti) результаты измерений псевдодальности по сигналам k-ого навигационного космического аппарата, соответственно полученные на эталонном пункте и подвижном объекте;
Rkэ(ti) результаты расчета дальности до k-ого навигационного космического аппарата, полученные на эталонном пункте;
Rkп(ti) результаты расчета дальности до k-ого навигационного космического аппарата, полученные на подвижном объекте;
Xk, Yk, Zk координаты k-ого навигационного космического аппарата в геоцентрической системе координат;
Xp, Yp, Zp координаты эталонного пункта или подвижного объекта в геоцентрической системе координат.
Выражение для вычисления вектора дифференциальной коррекции разностей псевдоскоростей, измеренных навигационной аппаратурой пользователя на подвижном объекте:
dVk(ti) (PVkэ(ti) Vkэ(ti)) (PVkп(ti) Vkп(ti)) (10)
k 1, 2, 3
Выражения для вычисления элементов градиентной матрицы:
Hk1 dXk/Rk,
Hk2 dYk/Rk,
Hk3 dZk/Rk,
Hk4 1. (11)
Vk ((DXk DXp) • (Xk-Xp) + (DYk DYp) • (Yk-Yp) + (DZk - DZp) • (Zk-Zp))/Rk, (12)
где PVk(ti) результаты измерений радиальных псевдоскоростей по допплеровским сдвигам сигнала k-ого навигационного космического аппарата соответственно, полученные на эталонном пункте и подвижном объекте;
Vkэ(ti) результаты расчета радиальной скорости k-ого навигационного космического аппарата, полученные на эталонном пункте;
Vkп(ti) результаты расчета радиальной скорости k-ого навигационного космического аппарата, полученные на подвижном объекте;
DXk, DYk, DZk производные координат k-ого навигационного космического аппарата;
DXp, DYp, DZp производные координат подвижного объекта или эталонного пункта в геоцентрической системе координат.
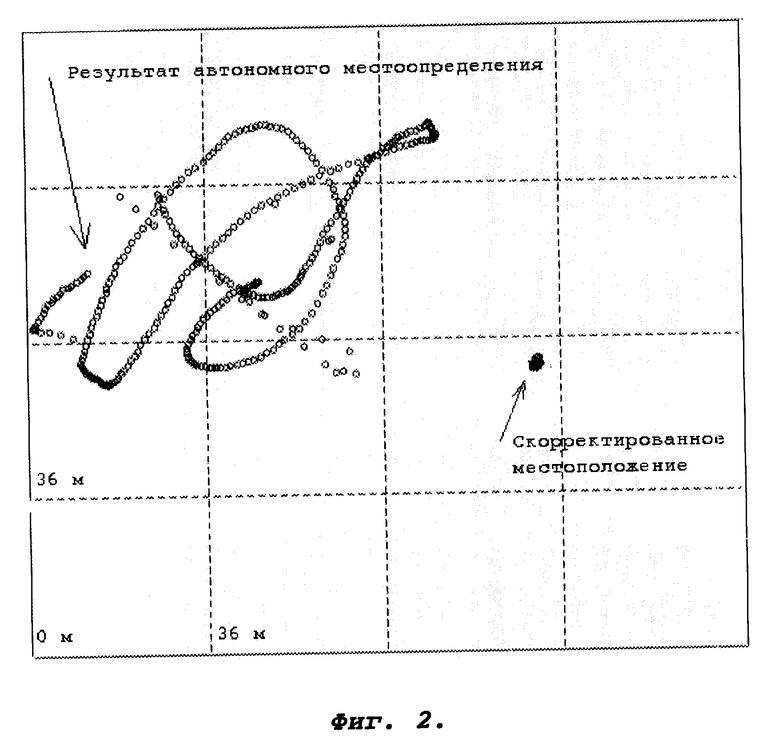
На фиг. 2 показаны результаты практического применения системы для подвижного объекта во время стоянки. В кадре передаваемой информации приходит автономноопределенный вектор состояния (результат автономного местоопределения). В результате работы системы получается скорректированный вектор состояния подвижного объекта (скорректированное местоположение).
Таким образом, практическое использование способа по данному изобретению позволяет при сохранении точности определения вектора состояния подвижного объекта существенно снизить нагрузку на линию связи с эталонным пунктом, тем самым повысить эффективность ее использования за счет увеличения числа подвижных объектов, обслуживаемых системой.
Изобретение относится к навигации с использованием навигационных космических аппаратов. Техническим результатом является уменьшение нагрузки на канал связи и, как следствие, увеличение числа подвижных объектов, обслуживаемых одним эталонным пунктом. Результат достигается тем, что на подвижном объекте измеряют навигационные параметры по навигационным сигналам всех навигационных космических аппаратов и, сформировав их в соответствии с предложенной зависимостью, включают в кадр передаваемой информации наряду с другими параметрами. На эталонном пункте по приходу кадра формируют "рабочее созвездие" (с числом аппаратов более трех, наблюдаемых как с подвижного, так и с эталонного пунктов). По вектору состояния подвижного объекта, переданного в кадре, и навигационного космического аппарата, вычисленного на эталонном пункте, восстанавливают навигационные параметры из полученного кадра по предложенному алгоритму и определяют вектор состояния подвижного объекта. 2 ил.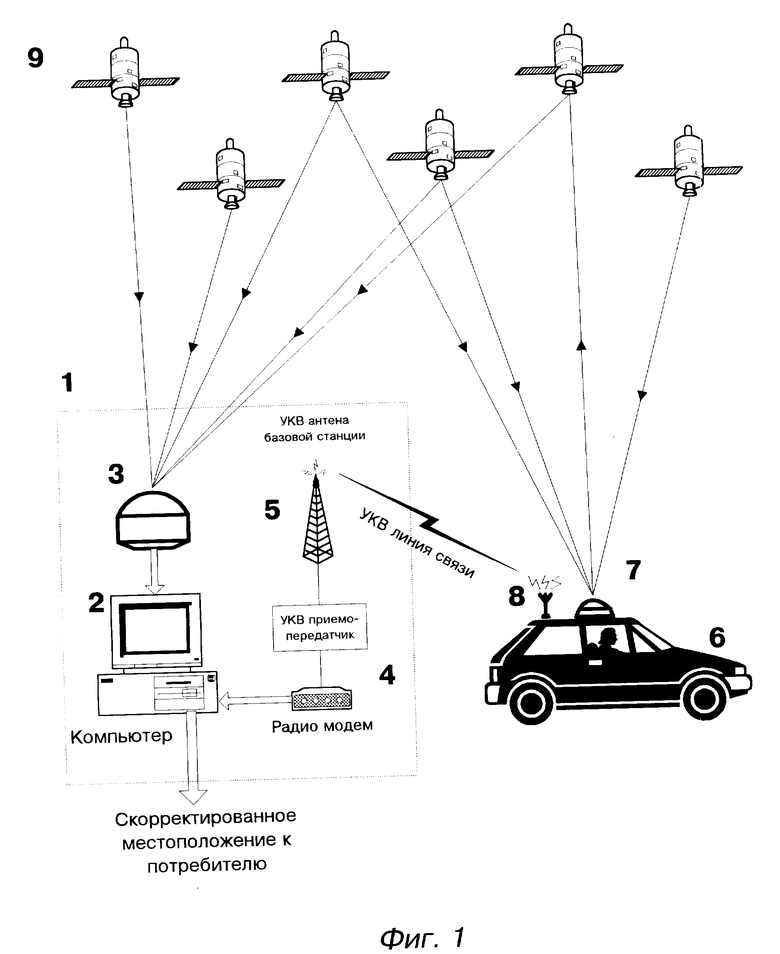
Способ определения вектора состояния подвижного объекта в реальном масштабе времени с использованием навигационных космических аппаратов космической навигационной системы, включающий измерение с привязкой к времени навигационных параметров: псевдодальностей и доплеровского сдвига частоты несущей по навигационным сигналам навигационных космических аппаратов, образующих рабочее созвездие в составе космической навигационной системы с числом навигационных космических аппаратов более трех, для подвижного объекта и эталонного пункта, вычисление поправок навигационных параметров, формирование кадра, включающего величины псевдодальностей и доплеровских сдвигов частоты несущей по всем навигационным космическим аппаратам из рабочего созвездия и его передачу, коррекцию навигационных параметров подвижного объекта и определение вектора состояния подвижного объекта с учетом скорректированных навигационных параметров, отличающийся тем, что кадр информации, передаваемой с подвижного объекта, содержит определенный автономно его вектор состояния и навигационные параметры, причем каждый навигационный параметр формируют в виде
НП N • D + Д,
где N целое число;
Д домер 0 D;
D величина интервала 0 6 априорных средних квадратических отклонений (СКО),
при этом для измерения псевдодальности априорная СКО (Sn) вычисляется по формуле
где Sи н с т СКО аппаратных шумов измерения;
Sз а ш СКО эффекта искусственного зашумления навигационного сигнала;
Sи о н СКО ошибки, вызванной распространением сигнала в ионосфере;
Sт р о п СКО ошибки, вызванной распространением сигнала в тропосфере;
Sэ ф е м СКО ошибки определения местоположения навигационного космического аппарата наземным комплексом слежения,
а для измерения доплеровского сдвига априорная СКО (Sд) вычисляется по формуле
где Sинстр СКО аппаратных шумов измерения;
Sз а ш СКО эффекта искусственного зашумления навигационного сигнала;
Sэ ф е м СКО ошибки определения скорости навигационного космического аппарата наземным комплексом слежения;
Sс к о р СКО ошибки определения радиальной скорости для подвижного объекта, движущегося со скоростью 0 800 м/с,
на эталонном пункте выбирают рабочее созвездие из навигационных космических аппаратов, одновременно отслеживаемых на подвижном объекте и эталонном пункте, с числом навигационных космических аппаратов не менее трех, по вектору состояния подвижного объекта и навигационных космических аппаратов на эталонном пункте вычисляют оценки навигации ионных параметров по каждому из навигационных космических аппаратов, находят целое число интервалов D, содержащихся в оценке навигационного параметра, восстанавливают навигационный параметр как сумму домера, полученного с подвижного объекта, и произведения целого числа N на величину интервала D, и по ним определяют вектор состояния подвижного объекта.
| Earl G | |||
| Blackwell | |||
| Overviem of Differential GPS Methods | |||
| - Global Position System (Papers pablished in Navigation), v | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
