Изобретение относится к измерительной технике и может быть использовано для морских, воздушных и наземных объектов. Задачей изобретения является повышение точности бесплатформенной инерциальной навигационной системы (БИНС) путем создания способа непрерывной коррекции углов ориентации от спутниковой навигационной системы (СНС).
Классическим способом определения углов ориентации является пересчет показаний ДУС (проекций абсолютной угловой скорости ωx, ωy, ωz) в угловые скорости  с последующим их интегрированием. Недостатком такого способа является накапливаемая во времени погрешность и, как следствие, ограниченное время работы. Для устранения указанного недостатка в систему необходимо вводить дополнительную информацию, характеризующую угловую ориентацию летательного аппарата (ЛА). В качестве источника такой информации обычно используют спутниковую навигационную систему. В распространенном способе комплексирования при помощи статистического фильтра оцениваются погрешности навигационных параметров и инструментальных погрешностей инерциальных датчиков. По результатам оценок по уравнениям динамики косвенным образом оценивают ошибки текущих измерений углов пространственной ориентации ЛА и корректируют текущие углы ориентации. Для обеспечения заданной точности при этом необходимо оценивать свыше двадцати параметров, что требует больших вычислительных мощностей. Определение углов пространственной ориентации спутниковыми навигационными системами путем измерения фазового сдвига между принятыми сигналами от каждого космического аппарата требует установки на ЛА нескольких антенн и линий приема и обработки сигналов, что для малогабаритных ЛА не всегда возможно.
с последующим их интегрированием. Недостатком такого способа является накапливаемая во времени погрешность и, как следствие, ограниченное время работы. Для устранения указанного недостатка в систему необходимо вводить дополнительную информацию, характеризующую угловую ориентацию летательного аппарата (ЛА). В качестве источника такой информации обычно используют спутниковую навигационную систему. В распространенном способе комплексирования при помощи статистического фильтра оцениваются погрешности навигационных параметров и инструментальных погрешностей инерциальных датчиков. По результатам оценок по уравнениям динамики косвенным образом оценивают ошибки текущих измерений углов пространственной ориентации ЛА и корректируют текущие углы ориентации. Для обеспечения заданной точности при этом необходимо оценивать свыше двадцати параметров, что требует больших вычислительных мощностей. Определение углов пространственной ориентации спутниковыми навигационными системами путем измерения фазового сдвига между принятыми сигналами от каждого космического аппарата требует установки на ЛА нескольких антенн и линий приема и обработки сигналов, что для малогабаритных ЛА не всегда возможно.
Известен способ угловой ориентации объекта по сигналам спутниковых радионавигационных систем. Патент №2379700, Российская Федерация, «Способ угловой ориентации объекта по сигналам спутниковых радионавигационных систем», МПК G01S 5/02, опубл. 20.01.2010, бюл. №2.
Патент основан на приеме сигналов от космических аппаратов глобальных навигационных спутниковых систем на разнесенные две или более антенны, измерении фазового сдвига между принятыми сигналами от каждого космического аппарата, проведении в течение интервала времени m измерений фазовых сдвигов между парами антенно-приемных устройств, в котором осуществляют подбор значений целочисленных неоднозначностей измерений фазовых сдвигов для минимального созвездия из s космических аппаратов, позволяющих определить возможные значения угловой ориентации.
Недостатком этого изобретения является то, что для его реализации кроме того, что необходимо иметь несколько антенн и линий приема и обработки сигналов, требуется предварительная коррекция измеренных фазовых сдвигов на величину аппаратурной составляющей систематической погрешности, вызванной неодинаковыми значениями группового времени запаздывания (ГВЗ) сигналов в антенно-приемных устройствах (далее антенно-приемные каналы), являющихся составной частью устройства определения угловой ориентации, размещаемого на объекте. Устройство определения угловой ориентации является одним из возможных вариантов реализации аппаратуры потребителей (АП) спутниковых радионавигационных систем. При неодинаковых значениях ГВЗ в антенно-приемных каналах разность значений ГВЗ в них будет отличаться от нуля. Если в расчетах принять указанную разность значений ГВЗ равной нулю, то это приведет к снижению точности оценки угловой ориентации объекта.
Существует патент на изобретение №2646954, «Способ коррекции бесплатформенной инерциальной навигационной системы», МПК G01C 21/06, опубликовано: 12.03.2018, Бюл. №8, принятый нами за прототип.
Способ включает в себя комплексирование сигналов, соответствующих угловой скорости и земной скорости объекта, с сигналами, соответствующими линейным ускорениям, и преобразованными с учетом параметров полета объекта, и адаптивную оценку крена и тангажа посредством фильтра Калмана, в котором коэффициент усиления изменяется в зависимости от текущих значений модулей перегрузки, линейной скорости, а также угловых скоростей. Используют сигнал, соответствующий продольной скорости объекта, полученный от системы воздушных сигналов (СВС) в виде функции от динамического давления, и сигнал, соответствующий продольному ускорению, полученный путем дифференцирования с последующим сглаживанием сигнала скорости от СВС.
Недостатком известного способа является то, что в приведенном изобретении не предусмотрено измерение курса. Кроме того, при маневрировании ЛА этот способ обладает недостаточной точностью. Это может привести к возникновению значительных погрешностей в результате постоянного маневрирования высокоманевренных ЛА.
Цель работы - повышение точности коррекции БИНС по углам крена, тангажа и обеспечение измерения курса с требуемой точностью во всем диапазоне полета.
Поставленная цель достигается за счет того, что согласно адаптивного способа коррекции углов ориентации бесплатформенной инерциальной навигационной системы (БИНС), при котором на основании сигналов, поступающих с акселерометров, входящих в состав БИНС, определяют модуль абсолютного ускорения, действующего на объект, на котором
установлена БИНС, совместно обрабатывают сигналы, соответствующие угловой скорости и земной скорости объекта, с сигналами, соответствующими линейным ускорениям и преобразованными с учетом параметров полета объекта, и осуществляют адаптивную оценку крена и тангажа посредством фильтра Калмана, в котором коэффициент усиления изменяется в зависимости от текущих значений модулей перегрузки и линейной скорости, а также угловых скоростей, дополнительно осуществляют адаптивную оценку угла курса объекта, используют сигналы, соответствующие линейным скоростям объекта, полученные от приемника спутниковой навигационной системы (СНС) с одной антенной и спроецированные в связанную систему координат, и сигналы, соответствующие линейным ускорениям объекта, полученные путем сглаживания с последующим дифференцированием скоростей приемника СНС с одной антенной, и проецированием их в связанную систему координат, кроме того, учитывают вектор ошибок измерений ускорений, вводят дополнительно два условия для проведения точной коррекции, которые определяют выдерживание постоянной ориентации, и отсутствие ускорений, создаваемых объектом.
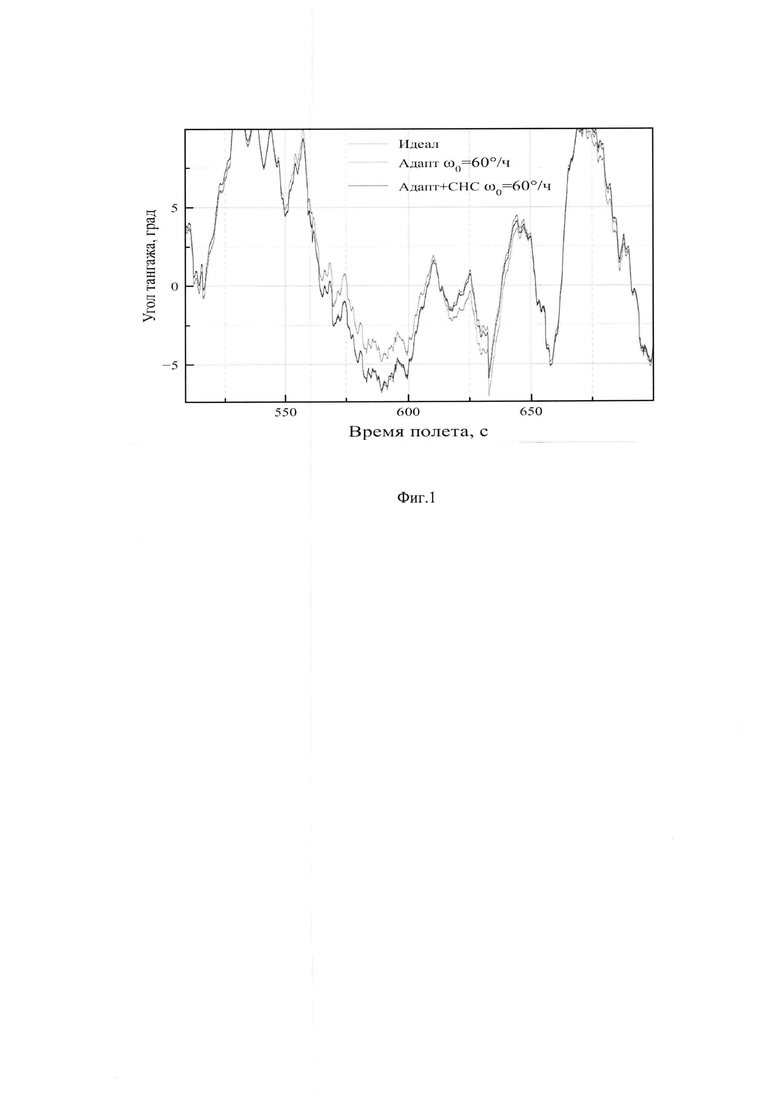
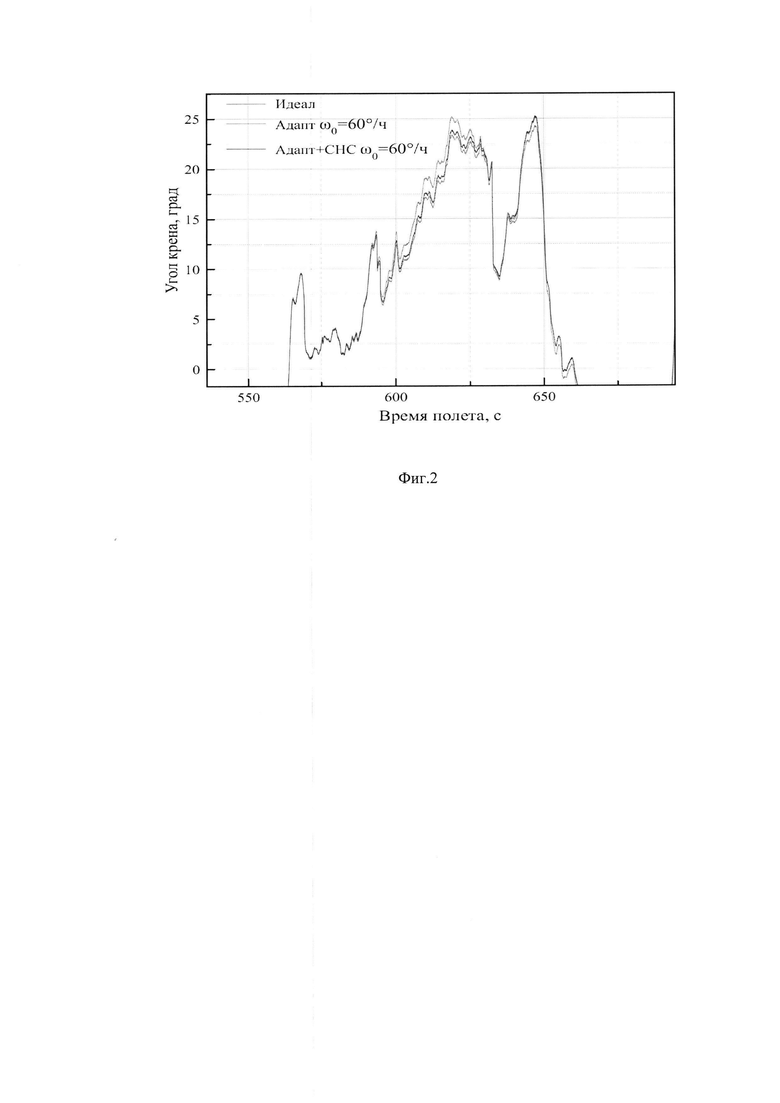
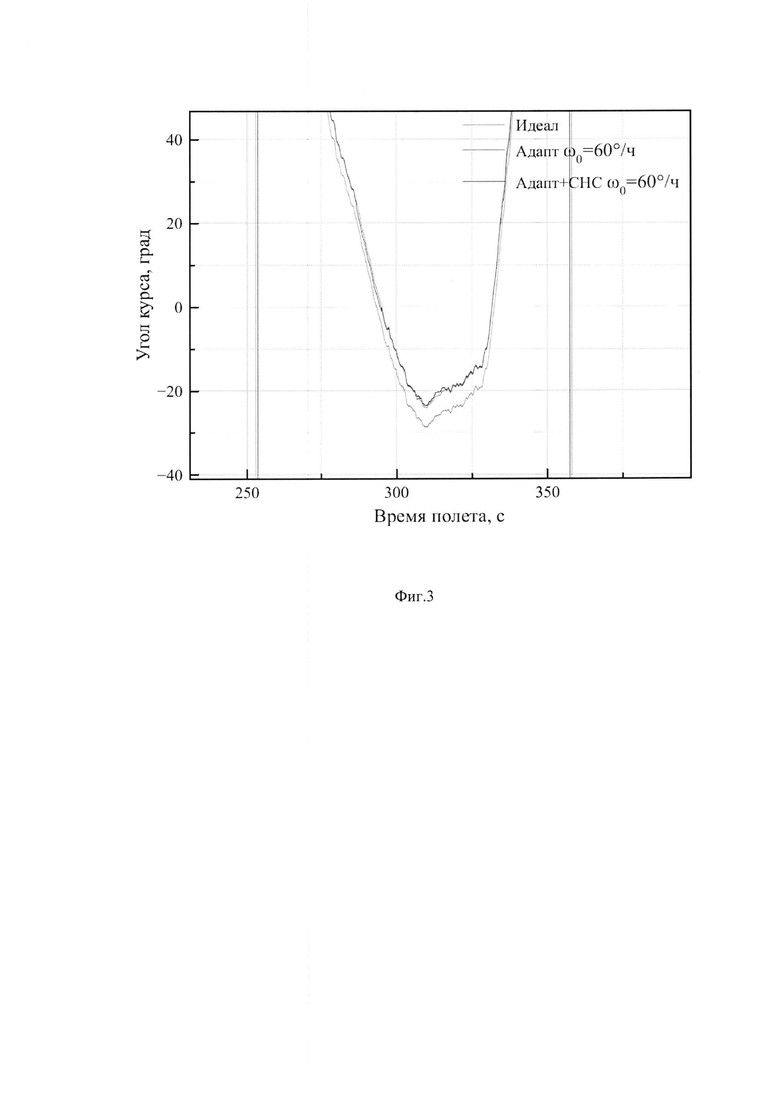
На фиг. 1, фиг. 2 и фиг. 3 представлены сравнительные результаты моделирования идеальных значений тангажа, крена и курса (красная линия), с результатами резервного режима (зеленая линия) и основного режима (синяя линия) коррекции БИНС.
Суть работы способа излагается ниже.
В рассматриваемом способе используются две модели ориентации. Модель 1 предназначена для учета изменения ориентации аппарата на шагах дискретизации измерений гироскопов. Она является динамической, детерминированной и представлена в параметрах Родрига-Гамильтона.
Модель 2 предназначена для коррекции модели 1. Вектор состояния модели 2 учитывает три компоненты: крен, тангаж и курс, которые подлежат оцениванию по текущим значениям сигналов акселерометров. Модель 2 является стохастической и статической, поскольку ее состояние учитывается для текущего момента дискретного времени ti. Соотношения для модели 2 имеют вид
В основном режиме по измерениям датчиков ДУС и ДЛУ оценивается вектор состояния:

Здесь ϑ - тангаж, γ - крен, φ - угол курса, i - номер дискретного момента времени измерений датчиков.
Изменение крена, тангажа и курса описывают с помощью кватерниона ориентации в блоке 5, для которого начальное значение угла курса равно начальному значению выставленного курса ЛА.

Расчет кватерниона (2) по вектору (1), необходимый для определения его начального значения и уточнения на каждом шаге коррекции выполняют с помощью известных соотношений. После вычисления исходный кватернион q заменяют на нормированный кватернион  .
.
По кватерниону ориентации определяется матрица поворота A(3,3)

Расчет крена и тангажа по матрице поворота выполняется с помощью соотношений (4).
Крен:
γ = -Arctg(a(3,2)/a(2,2)) в диапазоне ±180 градусов,
Тангаж:

Курс:
ψ = -Arctg(a(1,3)/a(1,1)) в диапазоне 0-360 градусов.
При счислении ориентации используется кватернион угловых скоростей.

где ωх, ωy, ωz - измерения, поступающие с блока датчиков угловых скоростей [rad/c].
Определение текущего кватерниона ориентации выполняется с помощью одношагового алгоритма, имеющего вид:

где Δt - шаг дискретизации измерений по времени,  - операция произведения кватернионов.
- операция произведения кватернионов.
Вектора состояния адаптивного фильтра Калмана представлен в выражении (1). Вектор наблюдений, обозначаемый далее Z, содержит измерения акселерометров. Вектор наблюдений, обозначаемый далее  , содержит параметры полета ЛА, определяемые по сигналам приемника СНС.
, содержит параметры полета ЛА, определяемые по сигналам приемника СНС.

Здесь νi - вектор ошибок измерений с заданной ковариационной матрицей R.
Функции ƒx, ƒy, ƒz определяют связь измерений перегрузок с параметрами полета. Точные соотношения для этих функций имеют вид:

Здесь Vx, Vy, Vz - проекции вектора земной скорости на связанные оси ЛА, которые определяют через матрицу направляющих косинусов A(3,3) согласно выражению (3):

где VN, VU, VE - проекции вектора земной скорости, полученные от приемников СНС;
g - ускорение силы тяжести.
Величины  проекций ускорений на оси связанной системы координат определяют как проекции ускорений преемника СНС через матрицу направляющих косинусов A(3,3). Для нахождения проекций ускорений необходимо решить систему дифференциальных уравнений. Учитывая то, что изменение скорости ЛА относится к длиннопериодическому движению, производная скорости выделяется из оценки скорости с помощью сглаживающего фильтра нижних частот.
проекций ускорений на оси связанной системы координат определяют как проекции ускорений преемника СНС через матрицу направляющих косинусов A(3,3). Для нахождения проекций ускорений необходимо решить систему дифференциальных уравнений. Учитывая то, что изменение скорости ЛА относится к длиннопериодическому движению, производная скорости выделяется из оценки скорости с помощью сглаживающего фильтра нижних частот.


Здесь T - постоянная времени фильтра.
С учетом (8) и (10) матрица Якоби вектора наблюдений (7) имеет вид.

Возможные большие рассогласования наблюдений  в режимах маневрирования учитываются с помощью включения в модель динамики вектора состояния (1) дополнительных возмущений, уровень которых определяется мерой отличия модуля перегрузки от единицы и модуля угловой скорости от нуля.
в режимах маневрирования учитываются с помощью включения в модель динамики вектора состояния (1) дополнительных возмущений, уровень которых определяется мерой отличия модуля перегрузки от единицы и модуля угловой скорости от нуля.
Для этого текущий вектор состояния (1) рассчитывается по кватерниону (2) после чего полагается, что он известен с точностью до указанных дополнительных возмущений. При этом уравнения объекта принимаются в виде:

Здесь xiq - вектор, в котором компоненты крена, тангажа и курса рассчитаны по соотношениям (3), wi - вектор возмущений с переменной ковариационной матрицей Qi:

В соответствии с (11) матрица дискретной модели объекта, используемая в алгоритме фильтра Калмана для прогноза ковариационной матрицы ошибок оценивания, принимается единичной.
Адаптивный алгоритм фильтра Калмана имеет следующий вид:

Возникающие отличия ускорений, создаваемым ЛА при маневрах, от ускорений, получаемых путем дифференцирования скоростей от приемников СНС при маневрах, учитывают с помощью включения в них вектора ошибок измерений νi дополнительных возмущений. При этом дисперсии  в ковариационной матрице Ri ставятся в соответствие со степенью выдерживания постоянной ориентации на шаге дискретизации измерений Δt, а также с уровнем влияния ускорений, создаваемых летательным аппаратом. Малое влияние этих факторов выражается двумя условиями.
в ковариационной матрице Ri ставятся в соответствие со степенью выдерживания постоянной ориентации на шаге дискретизации измерений Δt, а также с уровнем влияния ускорений, создаваемых летательным аппаратом. Малое влияние этих факторов выражается двумя условиями.
Условие 1 определяет выдерживание постоянной ориентации

Данное условие выдерживается относительно просто при задании достаточно большой частоты регистрации сигналов гироскопов.
Условие 2 определяет отсутствие ускорений, создаваемых летательным аппаратом. При этом модуль ускорений, измеряемых акселерометрами, равен ускорению свободного падения.

При точных акселерометрах и выполнении условий (15), (16) имеет место идеальный случай коррекции, в котором ошибки измерений в модели наблюдений (10) должны быть равны нулю, то есть  . Чем хуже выполняются условия (15), (16), тем больше должны быть дисперсии
. Чем хуже выполняются условия (15), (16), тем больше должны быть дисперсии  . В предлагаемом способе зависимость дисперсий
. В предлагаемом способе зависимость дисперсий  от модуля перегрузки задается функцией модуля перегрузки, формируемой по правилу: чем больше модуль перегрузки отличается от единицы, тем больше дисперсии ошибок измерений.
от модуля перегрузки задается функцией модуля перегрузки, формируемой по правилу: чем больше модуль перегрузки отличается от единицы, тем больше дисперсии ошибок измерений.

В реальном процессе полета условия (15), (16) выполняются в той или иной степени приближенно. При этом для достижения желаемой точности ориентации, одного отсчета измерений акселерометров недостаточно. Поэтому оценки крена, тангажа и курса уточняются рекуррентно по множеству измерений. Для пересчета оценок на очередной момент дискретного времени используется модель 1. При этом на каждом шаге Δt апостериорные математические ожидания крена, тангажа и курса пересчитываются в априорные математические ожидания. Для выдерживания правильного темпа списывания ковариаций ошибок оценивания, дисперсии возмущений  также задаются функциями модуля перегрузки, формируемыми по аналогичному правилу: чем больше модуль перегрузки отличается от единицы, тем больше дисперсии возмущений.
также задаются функциями модуля перегрузки, формируемыми по аналогичному правилу: чем больше модуль перегрузки отличается от единицы, тем больше дисперсии возмущений.

Дисперсии возмущений в ковариационной матрице (13) задаются нелинейными функциями модуля перегрузки и модуля угловой скорости.

Суть данных функций заключается в том, что чем больше модуль перегрузки отличается от единицы и модуль угловой скорости от нуля, тем больше должны быть СКО возмущений, действующих на модель (13). Для этого функции (19) задаются в кусочно-линейном виде, а узлы их интерполяции определяются путем настройки на обучающем множестве характерных процессов динамики ЛА. Настройка функций (19) осуществляется отдельно, для каждого типа ЛА.
Таким образом, с помощью предлагаемого способа решается задача определения вектора  по наблюдениям (7) с учетом одношагового алгоритма ориентации (6). Получаемый при этом вектор (1) на каждом шаге пересчитываются в кватернион (2).
по наблюдениям (7) с учетом одношагового алгоритма ориентации (6). Получаемый при этом вектор (1) на каждом шаге пересчитываются в кватернион (2).
Расчеты показывают, что устройство работает во всем диапазоне изменении углов тангажа, крена и курса.
Техническим результатом использования изобретения является повышение точности и обеспечение непрерывной коррекции всех трех углов ориентации курса, крена и тангажа в условиях маневрирования в полете, используя приемник СНС только с одной антенной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| Способ коррекции углов ориентации БИНС на скользящем интервале | 2022 |
|
RU2790076C1 |
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| Способ коррекции углов ориентации ЛА по сигналам от одноантенной СНС | 2022 |
|
RU2790081C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
Изобретение относится к измерительной технике и может быть использовано для морских, воздушных и наземных объектов. Адаптивный способ коррекции углов ориентации бесплатформенной инерциальной навигационной системы (БИНС), при котором на основании сигналов, поступающих с акселерометров, входящих в состав БИНС, определяют модуль абсолютного ускорения, действующего на объект, на котором установлена БИНС. Совместно обрабатывают сигналы, соответствующие угловой скорости и земной скорости объекта, с сигналами, соответствующими линейным ускорениям и преобразованными с учетом параметров полета объекта, и осуществляют адаптивную оценку крена и тангажа посредством фильтра Калмана, в котором коэффициент усиления изменяется в зависимости от текущих значений модулей перегрузки и линейной скорости, а также угловых скоростей. При этом дополнительно осуществляют адаптивную оценку угла курса объекта, используют сигналы, соответствующие линейным скоростям объекта, полученные от приемника спутниковой навигационной системы (СНС) с одной антенной и спроецированные в связанную систему координат, и сигналы, соответствующие линейным ускорениям объекта, полученные путем сглаживания с последующим дифференцированием скоростей от приемника СНС с одной антенной, и проецированием их в связанную систему координат. Кроме того, учитывают вектор ошибок измерений ускорений, вводят дополнительно два условия для проведения точной коррекции, которые определяют выдерживание постоянной ориентации, и отсутствие ускорений, создаваемых объектом. Техническим результатом является повышение точности и обеспечение непрерывной коррекции углов тангажа, крена и курса в условиях маневрирования в полете. 3 ил.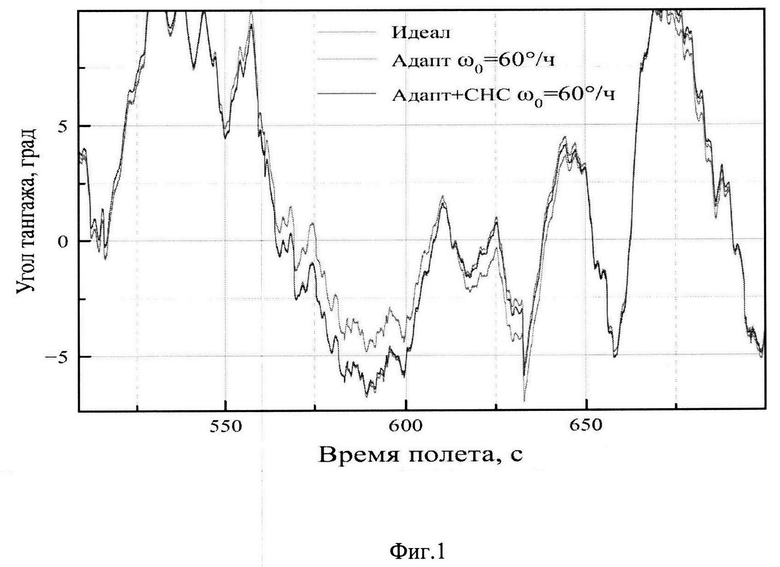
Адаптивный способ коррекции углов ориентации бесплатформенной инерциальной навигационной системы (БИНС), при котором на основании сигналов, поступающих с акселерометров, входящих в состав БИНС, определяют модуль абсолютного ускорения, действующего на объект, на котором установлена БИНС, совместно обрабатывают сигналы, соответствующие угловой скорости и земной скорости объекта, с сигналами, соответствующими линейным ускорениям и преобразованными с учетом параметров полета объекта, и осуществляют адаптивную оценку крена и тангажа посредством фильтра Калмана, в котором коэффициент усиления изменяется в зависимости от текущих значений модулей перегрузки и линейной скорости, а также угловых скоростей, отличающийся тем, что дополнительно осуществляют адаптивную оценку угла курса объекта, используют сигналы, соответствующие линейным скоростям объекта, полученные от приемника спутниковой навигационной системы (СНС) с одной антенной и спроецированные в связанную систему координат, и сигналы, соответствующие линейным ускорениям объекта, полученные путем сглаживания с последующим дифференцированием скоростей от приемника СНС с одной антенной, и проецированием их в связанную систему координат, кроме того, учитывают вектор ошибок измерений ускорений, вводят дополнительно два условия для проведения точной коррекции, которые определяют выдерживание постоянной ориентации, и отсутствие ускорений, создаваемых объектом.
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2646954C2 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| Способ артроскопического лечения хронической передней нестабильности плечевого сустава методом лавсанопластики | 2020 |
|
RU2749842C1 |

