Изобретение относится к конвейеростроению, а именно к наклонным ленточным конвейерам с подвесной лентой, предназначенным для транспортирования кусковых грузов вверх по уклону.
Известен наклонный конвейер с подвесной лентой, содержащий бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую и нижнюю нерабочую ветви с прикрепленными к бортам ленты кронштейнами, на которых установлены сдвоенные ходовые катки с возможностью их взаимодействия с трубчатыми направляющими, закрепленными на стойках (патент РФ №2152896, Кл. В65G 15/00, 2000 г.).
Недостатком известного конвейера является возможность скатывания грузонесущей и холостой ветвей ленты при ее обрыве при использовании конвейера в качестве уклонного или подъемного.
Известен наклонный ленточный конвейер с подвесной лентой (прототип), содержащий бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую и нижнюю нерабочую ветви и снабженную ходовыми катками с возможностью их взаимодействия с закрепленными на стойках направляющими, между грузонесущей и нерабочей ветвями с минимальными зазорами размещены гибкие элементы, свободные концы которых закреплены на стойках с поперечными связями, размещенными с минимальными зазорами под нерабочей ветвью ленты (патент РФ №2285650, В65G 15/08, 43/06, 2006 г.).
Однако недостатками известного конвейера являются ограниченная величина единичного тормозного усилия, создаваемого одним гибким элементом, и увеличенная нагрузка на него за счет динамической составляющей тормозного усилия, возрастающей с увеличением времени срабатывания улавливающего устройства. В связи с этим шаг расстановки гибких элементов по длине конвейера должен быть сокращен, что увеличивает материалоемкость и стоимость конвейера.
Техническим результатом изобретения является повышение эффективности и надежности улавливания оборвавшейся ленты за счет сокращения времени срабатывания улавливающих устройств.
Технический результат достигается тем, что в наклонном ленточном конвейере с подвесной лентой, содержащем бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую и нижнюю нерабочую ветви, опорные элементы для ленты, при этом под грузонесущей ветвью ленты с минимальными зазорами по отношению к ней при нормальной работе конвейера размещены гибкие элементы, согласно изобретению под нерабочей ветвью ленты с минимальными зазорами по отношению к ней при нормальной работе конвейера размещены выполненные из стальных проволочных канатов дополнительные гибкие элементы, расположенные с одинаковым шагом по длине конвейера, при этом концы гибких элементов на грузонесущей и нерабочей ветвях с помощью хомутов закреплены на концах горизонтально ориентированных соответственно верхних и нижних рычагов, направленных в сторону ленты, при этом верхние рычаги закреплены в верхней части вертикально ориентированных стоек, а нижние рычаги закреплены на нижних концах звеньев, которые посредством шарниров соединены со стойками, шарниры установлены с возможностью поворота звеньев в вертикальной плоскости, параллельной продольной оси конвейера, а стойки своей средней частью закреплены на кривошипах, симметрично размещенных относительно продольной оси конвейера и ориентированных в сторону ленты в своем исходном положении, при этом длина каждого рычага, закрепленного на упомянутом звене, превышает длину рычага, закрепленного в верхней части стойки, каждый кривошип установлен с возможностью поворота относительно вертикальной оси, размещенной в кронштейне рамы конвейера, на которой закреплен упор, исключающий повороты кривошипов в направлении движения грузонесущей ветви ленты при случайных ее касаниях гибких элементов.
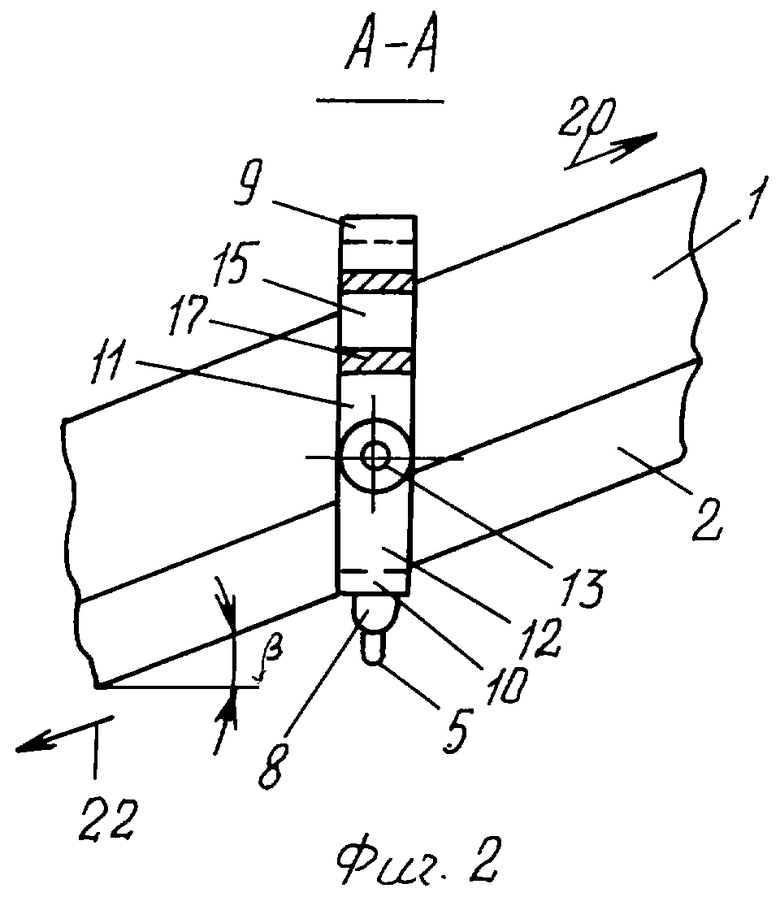
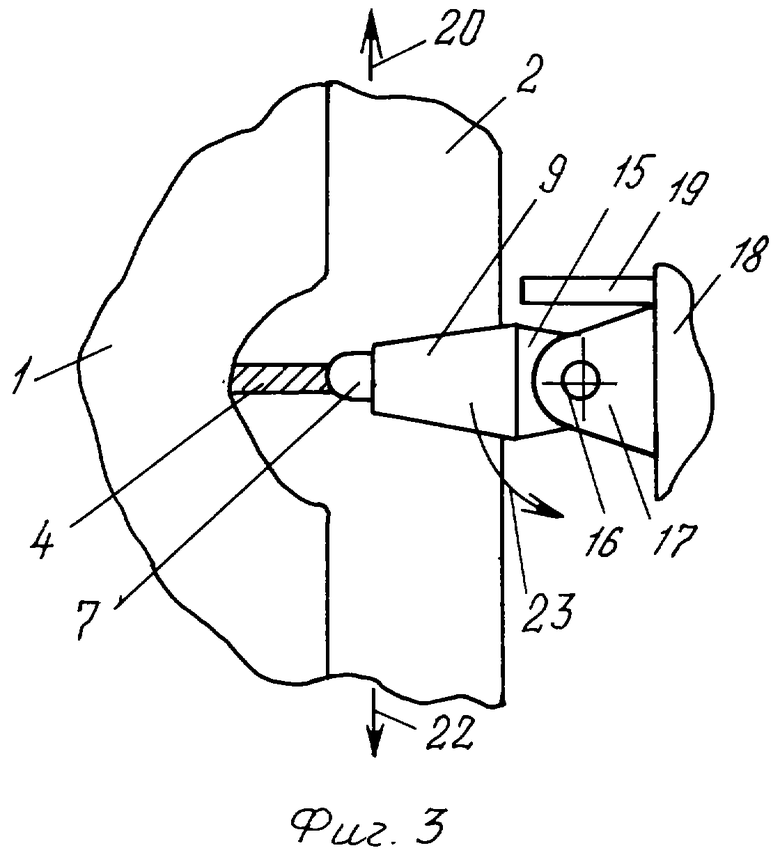
Наклонный ленточный конвейер с подвесной лентой представлен на фиг.1 - поперечный разрез, на фиг.2 - разрез А-А по фиг.1, на фиг.3 - план по фиг.1.
Наклонный ленточный конвейер с подвесной лентой содержит бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую 1 и нижнюю нерабочую 2 ветви. Опирание обеих ветвей 1 и 2 ленты может осуществляться с помощью прикрепленных к бортам ленты кронштейнов с ходовыми катками (не показаны) с возможностью их взаимодействия с неподвижными направляющими, установленными на раме конвейера (не показаны). Опирание ленты может осуществляться путем взаимодействия ее бортов с установленными на раме конвейера стационарными дисковыми роликами (не показаны) или каким-либо иным способом. Под грузонесущей 1 ветвью ленты с минимальными зазорами 3 по отношению к ней размещены выполненные из стальных проволочных канатов гибкие элементы 4, расположенные с одинаковым шагом по длине конвейера. Такие же дополнительные гибкие элементы 5 размещены с минимальными зазорами 6 под нерабочей ветвью 2 ленты. Концы гибких элементов 4 и 5 с помощью хомутов 7 и 8 закреплены на концах горизонтально ориентированных рычагов 9 и 10. При этом верхние рычаги 9 закреплены в верхней части вертикально ориентированных стоек 11, а нижние рычаги 10 закреплены на нижних концах звеньев 12, которые посредством шарниров 13 соединены со стойками 11. Шарниры 13 установлены с возможностью поворота звеньев 12 в вертикальной плоскости, параллельной продольной оси 14 конвейера. Стойки 11 в свою очередь своей средней частью закреплены на кривошипах 15, симметрично размещенных относительно продольной оси 14 конвейера и ориентированных в сторону ленты в своем исходном положении. При этом длина каждого рычага 10, закрепленного на звене 12, превышает длину рычага 9, закрепленного в верхней части стойки 11. Каждый кривошип 15 установлен с возможностью поворота относительно вертикальной оси 16, размещенной в кронштейне 17 рамы 18 конвейера. На раме 18 закреплен упор 19 с возможностью взаимодействия с кривошипом 15 при его повороте в направлении 20 движения грузонесущей ветви 1 ленты при нормальной работе конвейера. Длину рычагов 9 и 10 выбирают в зависимости от принятой схемы опирания подвесной ленты. 21 - транспортируемый груз, 22 - направление движения нерабочей ветви 2 до и после обрыва ленты и грузонесущей ветви 1 - после обрыва ленты. 23 - направление поворота кривошипа 15 после обрыва ленты, a, b - удаление концов рычагов 9 и 10 кривошипа 15 от оси 16 его поворота при взаимодействии рычага 9 с гибким элементом 4 - на грузонесущей ветви 1 и рычага 10 с гибким элементом 5 - на нерабочей ветви 2 ленты. β - угол наклона конвейера к горизонту.
Наклонный ленточный конвейер с подвесной лентой действует следующим образом. При нормальной работе конвейера на подъем груза 21 обе ветви, грузонесущая 1 и нерабочая 2, движутся в противоположных направлениях 20 и 22. При этом благодаря зазорам 3 и 6 обе ветви 1 и 2 не взаимодействуют с гибкими элементами 4 и 5, поэтому гибкие элементы 4 и 5 не препятствуют движению грузонесущей 1 и нерабочей 2 ветвей ленты. Наличие упоров 19 исключает повороты кривошипов 15 в направлении 20 движения грузонесущей ветви 1 ленты при случайных ее соприкасаниях с гибкими элементами 4.
После обрыва ленты ее нерабочая ветвь 2 продолжает двигаться в прежнем направлении (22) под действием синусоидальной составляющей собственного веса, а рабочая ветвь 1 после остановки под действием синусоидальных составляющих веса самой ленты и веса транспортируемого груза 21 реверсируется и начинает скатываться вниз в том же направлении 22, что и нерабочая ветвь 2. При движении грузонесущей ветви 1 и нерабочей ветви 2 ленты вниз за счет существенного снижения натяжения после обрыва обе ветви 1 и 2 провисают между смежными опорными элементами, входя в контакт с гибкими элементами 4 и 5. В результате этого между грузонесущей ветвью 1 и гибкими элементами 4, а также между нерабочей ветвью 2 и гибкими элементами 5 возникают силы трения. Эти силы, будучи приложены на плечах а и b рычагов 9 и 10 относительно оси 16 каждого кривошипа 15, будут создавать крутящие моменты относительно осей 16, благодаря чему кривошипы 15 будут поворачиваться относительно осей 16 в направлении 23. При повороте кривошипов 15 хомуты 7 и 8 начнут смещаться в стороны от продольной оси 14 конвейера, натягивая гибкие элементы 4 и 5 с уменьшением стрелы их провеса и подъемом гибких элементов 4 и 5 в сторону грузонесущей 1 и нерабочей 2 ветвей ленты с подпором обеих ветвей снизу при все увеличивающихся силах трения. А эти силы трения снова увеличивают крутящие моменты на кривошипах 15, которые в свою очередь опять увеличивают силы трения, и так до полного улавливания обеих ветвей оборвавшейся ленты, обе ветви 1 и 2 которой в итоге зависают на гибких элементах 4 и 5. При этом благодаря меньшему продольному натяжению нерабочей ветви 2 ленты по сравнению с натяжением грузонесущей ветви 1 как до обрыва, так и после него в начальный момент улавливания нерабочая ветвь 2 в первую очередь начнет контактировать с гибкими элементами 5, поворачивая звенья 12 относительно шарниров 13 по часовой стрелке (фиг.2) даже при незначительных в начальный момент величинах сил трения между нерабочей ветвью 2 и гибкими элементами 5. По мере отклонения звеньев 12 от вертикального положения указанные выше силы трения возрастают, в результате чего через стойки 11 на кривошипы 15 передается начальный крутящий момент. Этот момент обеспечивает гарантированный поворот кривошипов 15 в направлении 23 с подъемом гибких элементов 4 и их подпором снизу грузонесущей ветви 1 ленты. При этом за счет увеличенной длины рычагов 10 будет обеспечен и увеличенный крутящий момент относительно осей 16 кривошипов 15 (на плечах, равных b). Поэтому кривошипы 15 с закрепленными на рычагах 9 и 10 гибкими элементами 4 и 5 быстрее повернутся на угол, при котором гибкие элементы 4 и 5, поднявшись вверх, обеспечат величину тормозной силы, достаточную для улавливания обеих ветвей 1 и 2 оборвавшейся ленты. За счет сокращения времени улавливания оборвавшейся ленты снижается также величина динамической составляющей тормозного усилия и нагрузки как на саму ленту, так и на элементы улавливающего устройства.
Отличительные признаки изобретения обеспечивают надежное улавливание после обрыва ленты грузонесущей и нерабочей ветвей наклонного конвейера с подвесной лентой с минимальными динамическими нагрузками на гибкие элементы и при увеличенном шаге их размещения по длине конвейера.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2326040C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2327625C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2342301C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2008 |
|
RU2363644C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2396198C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2404107C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2335442C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2411175C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2405726C1 |
| КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ ДЛЯ НАКЛОННЫХ ВЫРАБОТОК | 2001 |
|
RU2184066C1 |
Изобретение относится к конвейеростроению, а именно к наклонным ленточным конвейерам с подвесной лентой, предназначенным для транспортирования кусковых грузов вверх по уклону. Конвейер содержит бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую и нижнюю нерабочую ветви, опорные элементы для ленты, при этом под грузонесущей ветвью ленты с минимальными зазорами по отношению к ней при нормальной работе конвейера размещены гибкие элементы. Под нерабочей ветвью ленты с минимальными зазорами по отношению к ней при нормальной работе конвейера размещены выполненные из стальных проволочных канатов дополнительные гибкие элементы, расположенные с одинаковым шагом по длине конвейера. Концы гибких элементов на грузонесущей и нерабочей ветвях с помощью хомутов закреплены на концах горизонтально ориентированных соответственно верхних и нижних рычагов. Верхние рычаги закреплены в верхней части вертикально ориентированных стоек. Нижние рычаги закреплены на нижних концах звеньев, которые посредством шарниров соединены со стойками. Шарниры установлены с возможностью поворота звеньев в вертикальной плоскости, параллельной продольной оси конвейера. Стойки, своей средней частью закреплены на кривошипах, симметрично размещенных относительно продольной оси конвейера и ориентированных в сторону ленты в своем исходном положении. Каждый кривошип установлен с возможностью поворота относительно вертикальной оси, размещенной в кронштейне рамы конвейера, на которой закреплен упор. Изобретение обеспечивает повышение эффективности и надежности улавливания оборвавшейся ленты за счет сокращения времени срабатывания улавливающих устройств. 3 ил.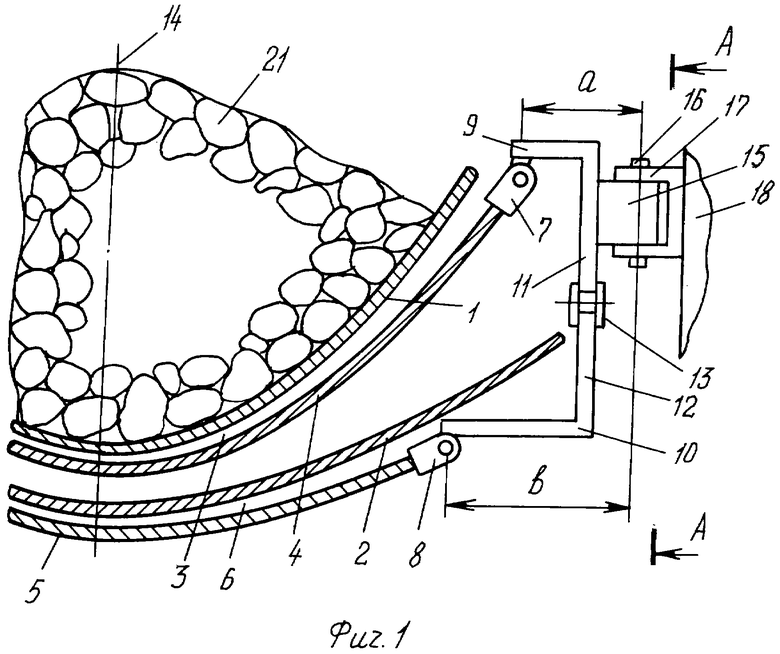
Наклонный ленточный конвейер с подвесной лентой, содержащий бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую и нижнюю нерабочую ветви, опорные элементы для ленты, при этом под грузонесущей ветвью ленты с минимальными зазорами по отношению к ней при нормальной работе конвейера размещены гибкие элементы, отличающийся тем, что под нерабочей ветвью ленты с минимальными зазорами по отношению к ней при нормальной работе конвейера размещены выполненные из стальных проволочных канатов дополнительные гибкие элементы, расположенные с одинаковым шагом по длине конвейера, при этом концы гибких элементов на грузонесущей и нерабочей ветвях с помощью хомутов закреплены на концах горизонтально ориентированных соответственно верхних и нижних рычагов, направленных в сторону ленты, при этом верхние рычаги закреплены в верхней части вертикально ориентированных стоек, а нижние рычаги закреплены на нижних концах звеньев, которые посредством шарниров соединены со стойками, шарниры установлены с возможностью поворота звеньев в вертикальной плоскости, параллельной продольной оси конвейера, а стойки своей средней частью закреплены на кривошипах, симметрично размещенных относительно продольной оси конвейера и ориентированных в сторону ленты в своем исходном положении, при этом длина каждого рычага, закрепленного на упомянутом звене, превышает длину рычага, закрепленного в верхней части стойки, каждый кривошип установлен с возможностью поворота относительно вертикальной оси, размещенной в кронштейне рамы конвейера, на которой закреплен упор, исключающий повороты кривошипов в направлении движения грузонесущей ветви ленты при случайных ее касаниях гибких элементов.
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2005 |
|
RU2285650C1 |
| КРУТОНАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 1998 |
|
RU2152896C2 |
| Устройство для улавливания лентыКОНВЕйЕРА B СлучАЕ EE ОбРыВА | 1979 |
|
SU829507A1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ СИСТЕМА | 2002 |
|
RU2210840C1 |

