Изобретение относится к конвейеростроению, а именно к наклонным ленточным конвейерам с подвесной лентой, предназначенным для транспортирования кусковых грузов вверх по уклону.
Известны конвейеры с подвесной лентой, содержащие бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую и нижнюю нерабочую ветви с прикрепленными к бортам ленты кронштейнами, на которых установлены ходовые катки с возможностью их взаимодействия с трубчатыми направляющими, закрепленными на стойках (А.с. СССР №1795952, В65G 15/00,1990).
Недостатком конвейеров является невозможность их использования при наклонной установке в качестве уклонного из-за возможного обрыва ленты, что может привести к скатыванию вниз обеих ветвей ленты, опирающейся своими ходовыми катками на продольные направляющие.
Известен наклонный конвейер с подвесной лентой (прототип), содержащий бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую и нижнюю нерабочую ветви, между грузонесущей и нерабочей ветвями ленты размещены гибкие элементы, свободные концы которых закреплены на стойках конвейера, при этом гибкие элементы при нормальной работе конвейера размещены с минимальным зазором по отношению к грузонесущей ветви ленты, причем гибкие элементы выполнены из отрезков стальных проволочных канатов (Пат. РФ №2285650, В65G 15/08, 2006 г.).
Однако в известном конвейере не полностью используются возможности улавливающего устройства при реализации тормозного усилия после обрыва ленты.
Техническим результатом изобретения является повышение тормозного усилия, уменьшение тормозного пути грузонесущей ветви ленты после ее обрыва и повышение надежности срабатывания улавливающего устройства.
Технический результат достигается тем, что в наклонном конвейере с подвесной лентой, содержащем бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую и нижнюю нерабочую ветви, между грузонесущей и нерабочей ветвями ленты с минимальным зазором по отношению к грузонесущей ветви размещены гибкие элементы, свободные концы которых закреплены на стойках конвейера, причем гибкие элементы выполнены из отрезков стальных проволочных канатов, согласно изобретению концы гибких элементов закреплены на стойках конвейера с помощью поворотных в горизонтальной плоскости относительно шарниров рычагов, при этом в исходном положении рычаги отклонены в сторону, противоположную направлению движения грузонесущей ветви ленты при нормальной работе конвейера, и образуют с его продольной осью острые углы α, равные 45-55 градусам, а в средней части каждого гибкого элемента симметрично относительно продольной оси конвейера закреплены по крайней мере два консольных захвата, ориентированные к горизонту под углом наклона, равным углу β наклона грузонесущей ветви ленты. Консольные захваты к гибкому элементу в виде стального проволочного каната могут быть прикреплены с помощью разрезной втулки и болтового соединения. Рабочая кромка каждого консольного захвата в плане и сбоку может быть выполнена закругленной.
Наклонный конвейер с подвесной лентой представлен на фиг.1 - вид сбоку, на фиг.2 - план по фиг.1, на фиг.3 - вертикальный разрез по грузонесущей ветви ленты при нормальной работе конвейера, на фиг.4 - узел крепления консольных захватов к гибкому элементу.
Наклонный конвейер с подвесной лентой содержит бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую 1 и нижнюю нерабочую (не показана) ветви. Опоры для ленты (не показаны) могут быть как стационарные в виде дисковых роликов, взаимодействующих с бортами ленты, так и в виде ходовых катков с возможностью их перемещения по направляющим. Между грузонесущей 1 и нерабочей ветвями ленты с минимальным зазором 2 размещены гибкие элементы 3, расположенные с одинаковым шагом по длине конвейера. Концы 4 и 5 гибких элементов 3 закреплены на стойках 6 и 7 конвейера с помощью поворотных в горизонтальной плоскости относительно шарниров 8 и 9 рычагов 10 и 11. При этом в исходном положении при нормальной работе конвейера рычаги 10 и 11 отклонены в сторону, противоположную направлению 12 движения грузонесущей ветви 1 ленты, и образуют с продольной осью 13 конвейера острые углы α, равные 45-55 градусам. В средней части каждого гибкого элемента 3 симметрично относительно продольной оси 13 конвейера закреплены по крайней мере два консольных захвата 14 и 15, ориентированные к горизонту под углом наклона, равным углу β наклона грузонесущей ветви 1 ленты. Консольные захваты 14 и 15 к гибкому элементу 3 (стальному проволочному канату) прикреплены с помощью разрезной втулки 16 и болтового соединения 17. Рабочая кромка каждого консольного захвата 14 и 15 в плане (фиг.2) и сбоку (фиг.4) может быть выполнена закругленной.
18 - транспортируемый груз, 19 - направление движения грузонесущей ветви 1 ленты после обрыва, 20 продольный профиль нижнего участка грузонесущей ветви 1 ленты при ее улавливании, 21 - положение гибкого элемента 3 при улавливании ленты.
Наклонный конвейер с подвесной лентой действует следующим образом. При нормальной работе конвейера на подъем транспортируемого груза 18 грузонесущая ветвь 1 ленты движется в направлении 12. При этом гибкие элементы 3 не препятствуют движению грузонесущей ветви 1 ленты за счет постоянного минимального зазора 2 между ними.
После обрыва ленты ее грузонесущая ветвь 1 после остановки под действием синусоидальных составляющих веса самой ленты 1 и веса транспортируемого груза 18 начинает скатываться вниз в направлении 19. После обрыва ленты продольное натяжение ее грузонесущей ветви 1 по величине близко к нулевому значению, поэтому лента провисает и входит в контакт с гибким элементом 3. За счет сил трения между ними при движении грузонесущей ветви 1 ленты вниз гибкие элементы 3 отклоняются в сторону движения 19. Вместе с каждым гибким элементом 3 в ту же сторону поворачиваются относительно своих шарниров 8 и 9 рычаги 10 и 11, к которым гибкий элемент 3 прикреплен своими концами 4 и 5. После входа в контакт с грузонесущей ветвью 1 ленты гибкого элемента 3 за счет возникших между ними сил трения гибкие элементы 3 будут продолжать поворачиваться по часовой стрелке, подпирая грузонесущую ветвь 1 ленты снизу при все увеличивающихся силах трения с образованием деформированного участка 20. Эффективность захвата грузонесущей ветви 1 ленты существенно увеличивается за счет поворота рычагов 10 и 11, который сопровождается дополнительным подъемом гибкого элемента 3 и дополнительной деформацией грузонесущей ветви 1 ленты снизу, а также за счет упора консольных захватов 14 и 15 в набегающую на них уже деформированную (20) ленту, благодаря чему создается дополнительное торможение ленты с находящимся на ней транспортируемым грузом 18. За счет суммарного действия всех перечисленных сил торможения происходит улавливание грузонесущей ветви 1 после ее обрыва.
Отличительные признаки изобретения обеспечивают улавливание грузонесущей ветви ленты наклонного конвейера с подвесной лентой после ее обрыва при увеличенном тормозном усилии, что позволяет уменьшить тормозной путь, время улавливания и повысить надежность срабатывания улавливающего устройства по сравнению с конвейером-прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2326040C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2326041C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2396198C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2342301C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2404107C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2405726C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2327625C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2411175C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2350538C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2335442C1 |
Наклонный конвейер содержит замкнутую в вертикальной плоскости ленту. Между грузонесущей (1) и нерабочей ветвями ленты размещены гибкие элементы (3) из стальных проволочных канатов. Концы (4, 5) гибких элементов закреплены на стойках (6, 7) конвейера с помощью поворотных в горизонтальной плоскости относительно шарниров (8, 9) рычагов (10, 11). В исходном положении рычаги отклонены в сторону, противоположную направлению движения грузонесущей ветви ленты при нормальной работе конвейера, и образуют с его продольной осью (13) острые углы α, равные 45-55 градусам. В средней части каждого гибкого элемента симметрично относительно продольной оси конвейера закреплены два консольных захвата (14, 15), ориентированные к горизонту под углом наклона, равным углу β наклона грузонесущей ветви ленты. Обеспечивается улавливание грузонесущей ветви ленты наклонного конвейера с подвесной лентой после ее обрыва при увеличенном тормозном усилии. 2 з.п. ф-лы, 4 ил.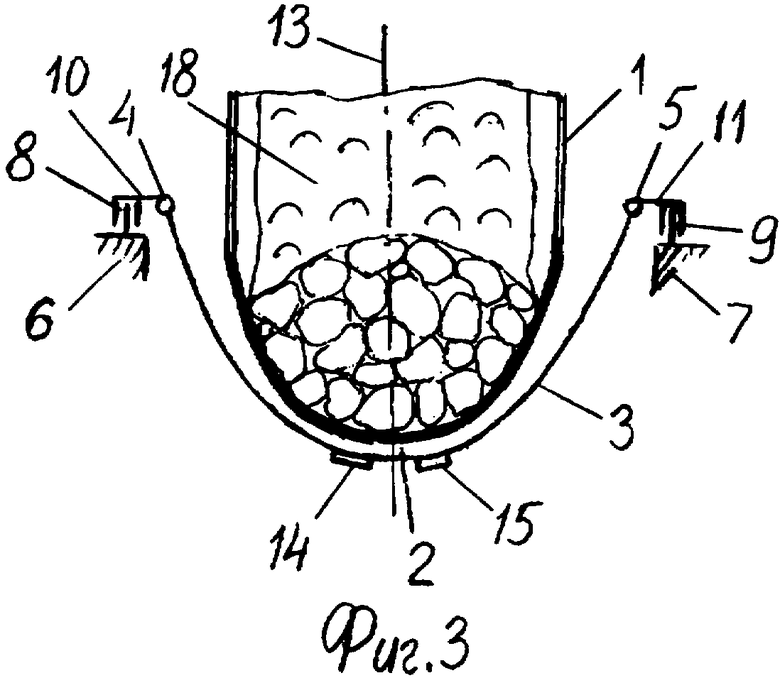
1. Наклонный конвейер с подвесной лентой, содержащий бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую и нижнюю нерабочую ветви, между грузонесущей и нерабочей ветвями ленты с минимальным зазором по отношению к грузонесущей ветви размещены гибкие элементы, свободные концы которых закреплены на стойках конвейера, причем гибкие элементы выполнены из отрезков стальных проволочных канатов, отличающийся тем, что концы гибких элементов закреплены на стойках конвейера с помощью поворотных в горизонтальной плоскости относительно шарниров рычагов, при этом в исходном положении рычаги отклонены в сторону противоположную направлению движения грузонесущей ветви ленты при нормальной работе конвейера и образуют с его продольной осью острые углы α, равные 45-55°, а в средней части каждого гибкого элемента симметрично относительно продольной оси конвейера закреплены по крайней мере два консольных захвата, ориентированные к горизонту под углом наклона, равным углу β наклона грузонесущей ветви ленты.
2. Конвейер по п.1, отличающийся тем, что консольные захваты к гибкому элементу в виде стального проволочного каната прикреплены с помощью разрезной втулки и болтового соединения.
3. Конвейер по п.1, отличающийся тем, что рабочая кромка каждого консольного захвата в плане и сбоку выполнена закругленной.
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2005 |
|
RU2285650C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2308406C1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| US 5161676 A, 10.11.1992. | |||

