Изобретение относится к конвейеростроению, а именно к наклонным ленточным конвейерам с разными способами опирания ленты: с подвесной лентой и на роликовых опорах, которые предназначены для транспортирования кусковых грузов как на подъем, так и на спуск, т.е. к подъемным, уклонным и бремсберговым конвейерам.
Известен наклонный конвейер с подвесной лентой (прототип), содержащий бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую и нижнюю нерабочую ветви, между грузонесущей и нерабочей ветвями ленты размещены гибкие элементы, свободные концы которых закреплены на стойках конвейера, при этом гибкие элементы при нормальной работе конвейера размещены с минимальным зазором по отношению к грузонесущей ветви ленты, выполнены из отрезков стальных проволочных канатов (Пат. РФ №2285650, В65G 15/08, 2006 г.).
Однако улавливающее устройство известного конвейера может быть использовано только для подъемных и уклонных конвейеров, т.к. срабатывает при движении ленты вниз. Оно не может быть использовано также как стопорное устройство после отключения привода конвейера, что особенно важно для конвейеров увеличенной длины, как дополнительное средство затормаживания контура ленты с заполненной транспортируемым грузом грузонесущей ветвью, в том числе при несрабатывании или выходе из строя тормоза конвейера. Кроме того, в конвейере-прототипе не полностью используются возможности улавливающего устройства при реализации тормозного усилия после обрыва ленты.
Техническим результатом изобретения является расширение возможностей использования конвейера не только в качестве подъемного и уклонного, но и в качестве бремсбергового, возможность использования улавливающего устройства также как стопорного, что повышает надежность работы тормозной системы конвейера, повышение тормозного усилия с уменьшением тормозного пути грузонесущей ветви ленты после ее обрыва, что повышает надежность срабатывания улавливающего устройства.
Технический результат достигается тем, что в наклонном ленточном конвейере, содержащем бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую и нижнюю нерабочую ветви, между грузонесущей и нерабочей ветвями ленты с минимальным зазором по отношению к грузонесущей ветви размещены гибкие элементы, выполненные из отрезков стальных проволочных канатов, свободные концы которых фиксированы на стойках конвейера, согласно изобретению гибкие элементы размещены с возможностью огибания ими отклоняющих блоков, размещенных по обе стороны от лотка грузонесущей ветви ленты и симметрично относительно ее продольной оси с горизонтальной ориентацией сбегающих ветвей, перпендикулярно направленных к продольной оси конвейерной ленты, а концы гибких элементов закреплены на кинематически связанном с приводом барабане диаметрально противоположно друг другу, причем одна ветвь гибкого элемента огибает барабан снизу, а другая - сверху, при этом отклоняющие блоки и барабан с приводом закреплены на П-образной стойке конвейера с возможность размещения внутри нее с необходимыми зазорами грузонесущей ветви ленты с находящимся на ней транспортируемым грузом, а привод барабана электрически связан с приводом ленточного конвейера и датчиком обрыва ленты.
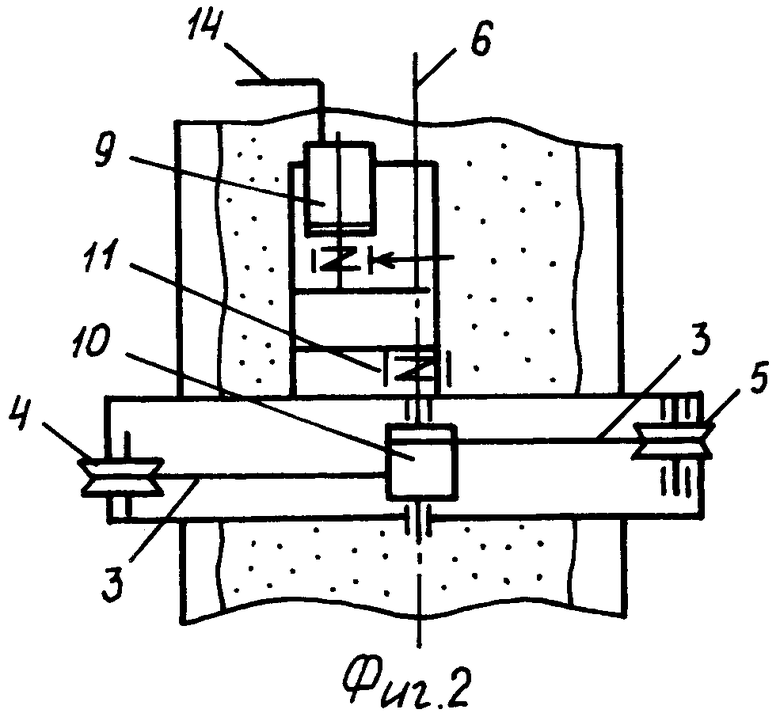
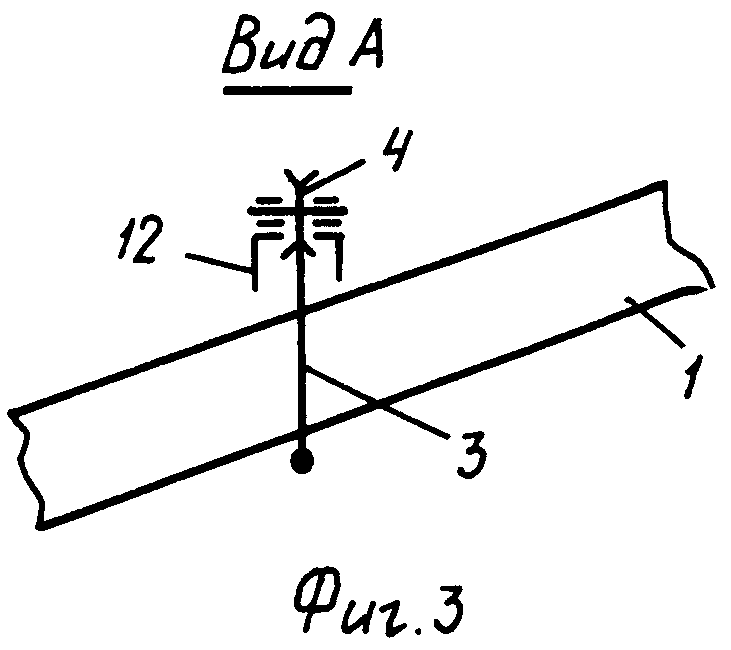
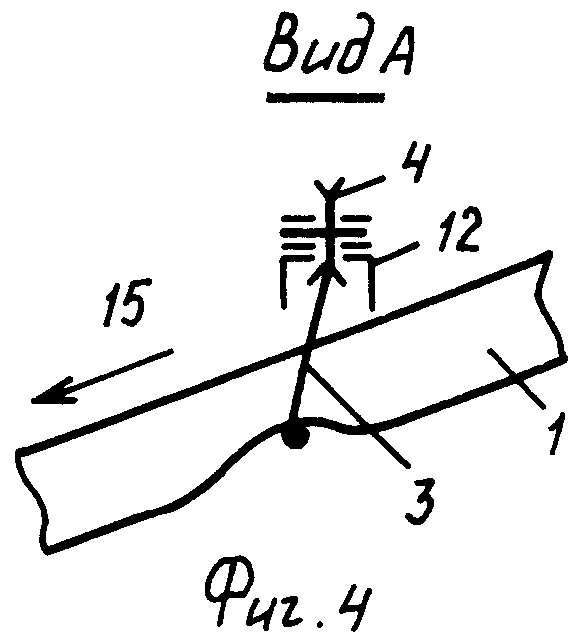
Наклонный конвейер с подвесной лентой представлен на фиг.1 - поперечный разрез по грузонесущей ветви ленты при нормальной работе конвейера, на фиг.2 - план по фиг.1, на фиг.3 и 4 - вид А по фиг.1 при нормальной работе конвейера и в момент стопорения контура ленты после отключения привода конвейера или улавливания оборвавшейся ленты.
Наклонный конвейер с подвесной лентой содержит бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую 1 и нижнюю нерабочую (не показана) ветви. Опоры для ленты (не показаны) могут быть как стационарные в виде дисковых роликов, взаимодействующих с бортами ленты, в виде ходовых катков с возможностью их перемещения по направляющим или стационарных роликов, формирующих поперечный желобчатый профиль ленты.
Между грузонесущей 1 и нерабочей ветвями ленты с минимальным зазором 2 размещены гибкие элементы 3, выполненные из стальных проволочных канатов. Гибкие элементы 3 размещены с возможностью огибания ими отклоняющих блоков 4 и 5, размещенных по обе стороны от лотка грузонесущей ветви 1 ленты и симметрично относительно ее продольной оси 6 горизонтальной ориентацией сбегающих ветвей, перпендикулярно направленных к продольной оси 6 конвейерной ленты. Концы 7 и 8 гибких элементов 3 закреплены на кинематически связанном с приводом 9 барабане 10 диаметрально противоположно друг другу. Привод 9 снабжен тормозом 11. Причем одна ветвь гибкого элемента 3 огибает барабан 10 снизу, а другая - сверху. Отклоняющие блоки 4, 5 и барабан 10 с приводом 9 закреплены на П-образной стойке 12 конвейера с возможность размещения внутри нее с необходимыми зазорами грузонесущей ветви ленты 1 с находящимся на ней транспортируемым грузом 13. Привод 9 барабана 10 электрически 14 связан с приводом (не показан) ленточного конвейера и датчиком обрыва ленты (не показан), 15 - направление движения грузонесущей ветви 1 ленты после обрыва.
Наклонный конвейер с подвесной лентой действует следующим образом. При нормальной работе конвейера на подъем транспортируемого груза 13 грузонесущая ветвь 1 ленты движется или вверх (подъемные и уклонные конвейеры), или вниз в направлении 15 (бремсберговые конвейеры). При этом гибкие элементы 3 не препятствуют движению грузонесущей ветви 1 ленты за счет постоянного минимального зазора 2 между ними. Их фиксация осуществляется с помощью тормозов 11. При выключении двигателя привода конвейера или после обрыва ленты от конечного переключателя (не показан) или от датчика обрыва ленты автоматически (с использованием электрического канала 14) растормаживается тормоз 11 и включается привод 9 барабана 10. При вращении барабана 10 обе ветви гибкого элемента 3, концы 7 и 8 которого закреплены на барабане 10 диаметрально противоположно друг другу, наматываются на барабан 10, двигаясь в противоположных направлениях. Благодаря этому гибкие элементы 3 входят в контакт с наружной поверхностью грузонесущей ветви 1 ленты, подпирая и деформируя ее снизу. Фиксация гибких элементов 3 в поднятом положении, соответствующем удержанию грузонесущей ветви 1 ленты, осуществляется тормозом 11. За счет сил трения между гибкими элементами 3 и прогнутой вверх деформированной лентой 1 происходит удержание ленты 1 от обратного движения как для подъемных и уклонных, так и для бремсберговых конвейеров при их работе в нормальном режиме или при обрыве ленты этих конвейеров. Причем тормозное усилие, удерживающее ленту 1 от скатывания вниз, еще более увеличивается за счет отклонения и дополнительного подпирания снизу ленты 1 гибкими элементами 3 при смещении ленты 1 в направлении 15. За счет суммарного действия всех перечисленных сил торможения происходит удержание ленты 1 от движения вниз при нормальной работе конвейера или улавливание грузонесущей ветви ленты 1 после ее обрыва.
Отличительные признаки изобретения обеспечивают удержание контура ленты подъемных, уклонных и бремсберговых конвейеров от движения вниз после выключения двигателя привода конвейера и улавливание грузонесущей ветви ленты упомянутых конвейеров после обрыва ленты при увеличенных тормозных усилиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2396198C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2008 |
|
RU2363644C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2404107C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2411175C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2408519C2 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2012 |
|
RU2494031C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2326041C1 |
| БРЕМСБЕРГОВЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2281899C1 |
| БРЕМСБЕРГОВЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279387C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2326040C1 |
Наклонный конвейер содержит бесконечную ленту, образующую грузонесущую (1) и нерабочую ветви. Между ветвями ленты с минимальным зазором (2) размещены гибкие элементы (3), выполненные из стальных проволочных канатов. Гибкие элементы огибают отклоняющие блоки (4, 5), размещенные по обе стороны от лотка грузонесущей ветви ленты и симметрично относительно ее продольной оси (6) с горизонтальной ориентацией сбегающих ветвей, перпендикулярно направленных к продольной оси конвейерной ленты. Концы (7, 8) гибких элементов закреплены на кинематически связанном с приводом (9) барабане (10) диаметрально противоположно друг другу. Отклоняющие блоки и барабан с приводом закреплены на П-образной стойке (12) конвейера с возможностью размещения внутри нее с необходимыми зазорами грузонесущей ветви ленты с находящимся на ней транспортируемым грузом (13). Привод барабана электрически связан с приводом ленточного конвейера и датчиком обрыва ленты. Обеспечивается удержание контура ленты от движения вниз после выключения двигателя привода конвейера и улавливание грузонесущей ветви ленты после обрыва ленты при увеличенных тормозных усилиях. 4 ил.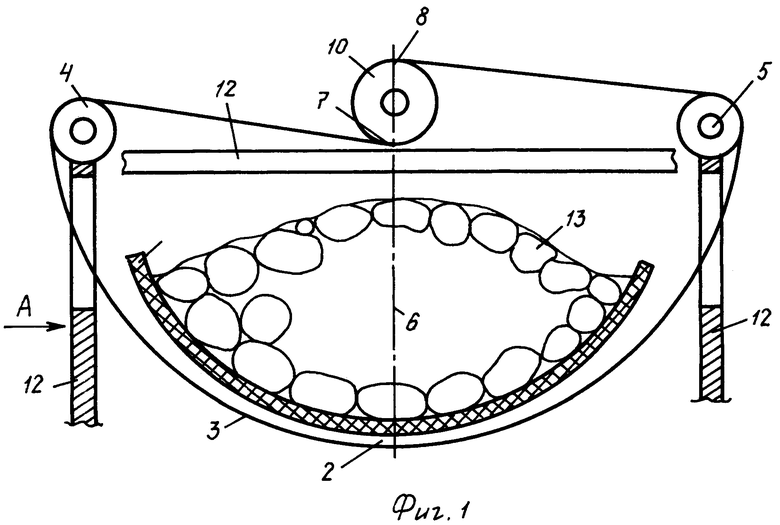
Наклонный ленточный конвейер, содержащий бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую и нижнюю нерабочую ветви, между грузонесущей и нерабочей ветвями ленты с минимальным зазором по отношению к грузонесущей ветви размещены гибкие элементы, выполненные из отрезков стальных проволочных канатов, свободные концы которых фиксированы на стойках конвейера, отличающийся тем, что гибкие элементы размещены с возможностью огибания ими отклоняющих блоков, размещенных по обе стороны от лотка грузонесущей ветви ленты и симметрично относительно ее продольной оси с горизонтальной ориентацией сбегающих ветвей, перпендикулярно направленных к продольной оси конвейерной ленты, а концы гибких элементов закреплены на кинематически связанном с приводом барабане диаметрально противоположно друг другу, причем одна ветвь гибкого элемента огибает барабан снизу, а другая - сверху, при этом отклоняющие блоки и барабан с приводом закреплены на П-образной стойке конвейера с возможностью размещения внутри нее с необходимыми зазорами грузонесущей ветви ленты с находящимся на ней транспортируемым грузом, а привод барабана электрически связан с приводом ленточного конвейера и датчиком обрыва ленты.
| Устройство для улавливания грузонесущей ленты конвейера | 1982 |
|
SU1058852A1 |
| Устройство для улавливания ленты наклонного конвейера | 1988 |
|
SU1567465A1 |
| Приспособление для центробежной заливки подшипниковых вкладышей | 1931 |
|
SU32683A1 |
| КАТОДНОЕ УСТРОЙСТВО АЛЮМИНИЕВОГО ЭЛЕКТРОЛИЗЕРА | 2002 |
|
RU2224824C2 |

