Изобретение относится к конвейеростроению, а именно к наклонным конвейерам с подвесной лентой, предназначенным для транспортирования кусковых грузов вверх по уклону.
Известен наклонный ленточный конвейер с подвесной лентой (прототип), содержащий бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую и нижнюю нерабочую ветви и снабженную ходовыми катками с возможностью их взаимодействия с закрепленными на стойках направляющими, улавливающее устройство, включающее размещенные между грузонесущей и нерабочей ветвями с минимальными зазорами гибкие элементы, свободные концы которых закреплены на стойках с поперечными связями, размещенными с минимальными зазорами под нерабочей ветвью ленты (Пат. РФ №2285650, В65G 15/08, 43/06, 2006 г.).
Однако недостатком известного конвейера является ограниченная величина единичного тормозного усилия, создаваемого одним гибким элементом, и достаточно большая нагрузка на него за счет динамической составляющей тормозного усилия, из-за увеличенного времени срабатывания улавливающего устройства. В связи с этим шаг расстановки гибких элементов по длине конвейера должен быть сокращен, что увеличивает материалоемкость и стоимость конвейера.
Техническим результатом изобретения является повышение эффективности и надежности улавливания оборвавшейся ленты за счет сокращения времени срабатывания улавливающего устройства, уменьшения динамической составляющей нагрузки на него и увеличения шага расстановки улавливающих устройств по длине конвейера.
Технический результат достигается тем, что в наклонном конвейере с подвесной лентой, содержащем раму, бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую и нижнюю нерабочую ветви, опорные элементы для ленты и улавливающие устройства для грузонесущей ветви ленты в виде размещенных под грузонесущей ветвью с минимальными зазорами стальных проволочных канатов, согласно изобретению каждый свободный конец каната закреплен на стойке, шарнирно установленной на раме с возможностью поворота в вертикальной плоскости, ориентированной в направлении движения ленты, причем стойка в нижней и верхней части выполнена с выступающими в сторону движения грузонесущей ветви ленты элементами, канат прикреплен к верхнему элементу, а нижний элемент выполнен в виде двуплечего рычага, свободный конец которого размещен с возможностью его упора в раму, в исходном положении верхний и нижний элементы ориентированы горизонтально, а соединяющая их часть стойки наклонена в сторону движения грузонесущей ветви ленты, шарнир стойки размещен со смещением в сторону движения грузонесущей ветви ленты относительно вертикали, проходящей через точку крепления каната к стойке, а на верхнем элементе стойки установлен с возможностью смещения относительно этого элемента противовес, вес которого выбран из условия обеспечения крутящего момента, превышающего крутящий момент обратного знака, создаваемый весом стойки относительно шарнира, при этом параметры улавливающих устройств выбираются из следующего соотношения:
sinα[lsinβ+(b-а)]+(1-cosα)[l+(b-a)sinβ]≥h,
где α - угол отклонения от вертикали средней части стойки, град.; l - длина средней части стойки, м; β - угол наклона конвейера в зоне установки улавливающего устройства, град.; a, b - длина нижнего и верхнего элементов стойки, м; h - подъем ленты канатом в момент улавливания ленты. Противовес может быть выполнен в виде гайки с возможностью ее взаимодействия с винтовой нарезкой на конце верхнего элемента стойки.
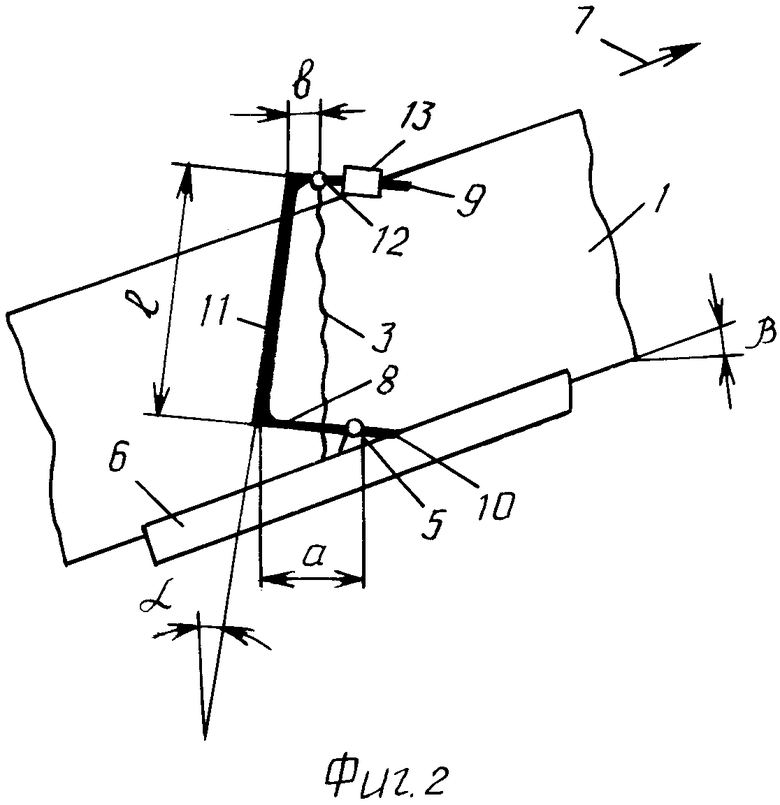
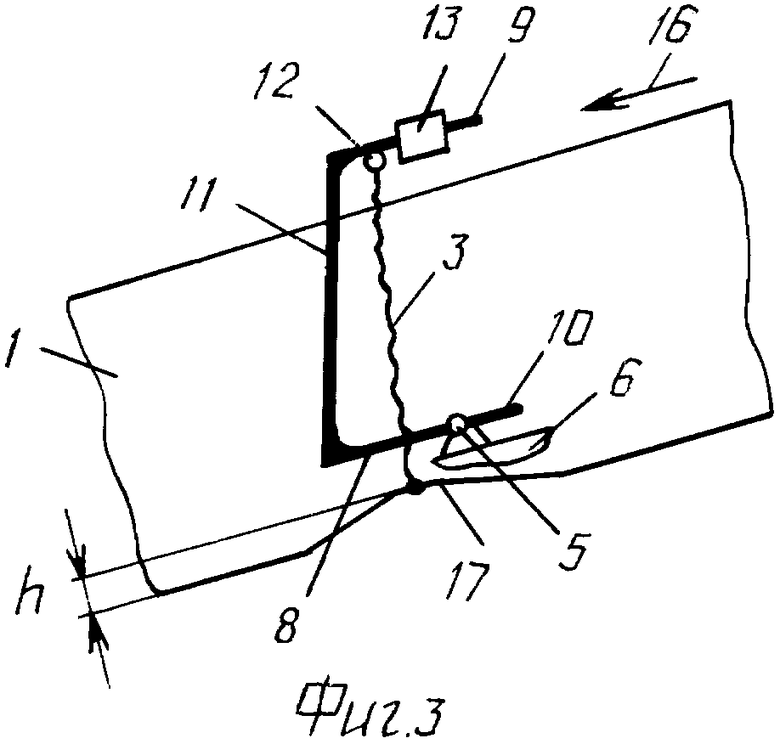
Наклонный конвейер с подвесной лентой представлен на фиг.1 - поперечный разрез по грузонесущей ветви; на фиг.2 - вид сбоку с положением улавливающего устройства при нормальной работе конвейера; на фиг.3 - то же, в момент улавливания, грузонесущей ветви ленты после ее обрыва.
Наклонный конвейер с подвесной лентой содержит бесконечно замкнутую в вертикальной плоскости ленту, образующую верхнюю грузонесущую 1 и нижнюю нерабочую (не показана) ветви. Опирание обеих ветвей ленты может осуществляться с помощью прикрепленных к бортам ленты кронштейнов с ходовыми катками (не показаны) с возможностью их взаимодействия с неподвижными направляющими (не показаны), установленными на раме конвейера. Опирание ленты может осуществляться путем взаимодействия ее бортов с установленными на раме конвейера стационарными дисковыми роликами (не показаны) или каким-либо иным способом. Под грузонесущей ветвью 1 ленты с минимальными зазорами 2 по отношению к ней размещены стальные проволочные канаты 3, расположенные с одинаковым шагом по длине конвейера. Каждый свободный конец каната 3 закреплен на стойке 4 (фиг.1), которая шарнирно (5) установлена на раме 6 с возможностью поворота в вертикальной плоскости, ориентированной в направлении 7 движения ленты 1. Стойка 4 в нижней и верхней части выполнена с направленными в сторону движения 7 грузонесущей ветви ленты 1 элементами 8 и 9. Канат 3 прикреплен к верхнему элементу 9, а нижний элемент 8 выполнен в виде двуплечего рычага, свободный конец 10 которого размещен с возможностью его упора в раму 6. В исходном положении верхний 9 и нижний 8 элементы ориентированы горизонтально, а соединяющая их часть 11 стойки 4 наклонена в сторону движения 7 грузонесущей ветви ленты 1. Шарнир 5 стойки 4 размещен со смещением в сторону движения 7 грузонесущей ветви ленты 1 относительно вертикали, проходящей через точку 12 крепления каната 3 к стойке 4. На верхнем элементе 9 стойки 4 установлен с возможностью смещения относительно этого элемента противовес 13. Вес противовеса 13 выбран из условия обеспечения крутящего момента, превышающего крутящий момент обратного знака, создаваемый весом стойки 4 относительно шарнира 5. При этом параметры всех улавливающих устройств выбираются из следующего соотношения:
sinα[lsinβ+(b-а)]+(1-cosα)[l+(b-a)sinβ]≥h,
где α - угол отклонения от вертикали средней части стойки, град.; l - длина средней части стойки, м; β - угол наклона конвейера в зоне установки улавливающего устройства, град.; a, b - длина нижнего и верхнего элементов стойки, м; h - подъем ленты канатом в момент улавливания ленты. 14 - продольная ось конвейера, 15 - транспортируемый груз, 16 - направление движения ленты 1 после ее обрыва. 17 - прогиб ленты 1 канатом 3 при улавливании ленты после ее обрыва.
Наклонный конвейер с подвесной лентой действует следующим образом. При нормальной работе конвейера на подъем груза 15 грузонесущая ветвь 1 ленты движется в направлении 7. При этом благодаря зазорам 2 лента 1 не взаимодействует со стальными проволочными канатами 3, поэтому они не препятствуют ее движению. Стойки 4 при их монтаже за счет выбора соотношения между собственным весом стойки 4 и весом противовеса 13 поворачиваются относительно шарнира 5 по часовой стрелке и свободными концами 10 своих нижних элементов 8 упираются в раму 6.
После обрыва ленты ее грузонесущая ветвь 1 после остановки под действием синусоидальных составляющих веса самой ленты 1 и веса транспортируемого груза 15 реверсируется и начинает скатываться вниз в направлении 16. При движении грузонесущей ветви 1 вниз за счет существенного снижения натяжения ленты 1 после обрыва она под действием собственного веса и веса находящегося на ней транспортируемого груза 15 провисает между смежными опорными элементами, входя в контакт со стальными проволочными канатами 3. В результате этого между грузонесущей ветвью 1 ленты и канатами 3 возникают силы трения. Эти силы трения вызывают натяжения канатов 3, которые создают крутящие моменты, которые поворачивают стойки 4 относительно шарниров 5 против часовой стрелки. При повороте стоек 4 точки крепления 12 к ним канатов 3 поднимаются вверх (фиг.3), благодаря чему канаты 3 подпирают ленту 1 с ее прогибом 17 вверх с резким увеличением сил трения между канатами 3 и лентой 1. Выбранные параметры улавливающего устройства позволяют за короткий промежуток времени при минимальном обратном ходе ленты 1 создать значительные по величине силы торможения, которые позволяют сократить тормозной путь и время срабатывания системы улавливания. За счет сокращения времени улавливания оборвавшейся ленты снижается также величина динамической составляющей тормозного усилия и нагрузки как на саму ленту, так и на элементы каждого улавливающего устройства. Это позволяет также сократить количество улавливающих устройств на конвейере. При этом расчетная величина h прогиба ленты 1 при ее улавливании может быть установлена экспериментально или подобрана при наладочных работах.
Отличительные признаки изобретения обеспечивают надежное улавливание ленты после обрыва грузонесущей ветви ленты наклонного конвейера с подвесной лентой с минимальными значениями тормозного пути и динамических нагрузок на элементы улавливающих устройств при увеличенном шаге их размещения по длине конвейера.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2326041C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2411175C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2326040C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279391C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1997 |
|
RU2130888C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ ЛОВИТЕЛЕЙ ДЛЯ КОНВЕЙЕРОВ С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2350915C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2335442C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ ЛОВИТЕЛЕЙ ДЛЯ КОНВЕЙЕРОВ С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2323424C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2350538C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2008 |
|
RU2363644C1 |
Изобретение относится к конвейеростроению, а именно к наклонным конвейерам с подвесной лентой. В наклонном конвейере каждый свободный конец каната закреплен на стойке, шарнирно установленной на раме с возможностью поворота в вертикальной плоскости, ориентированной в направлении движения ленты. Стойка в нижней и верхней части выполнена с выступающими в сторону движения грузонесущей ветви ленты элементами. Канат прикреплен к верхнему элементу. Нижний элемент выполнен в виде двуплечего рычага, свободный конец которого размещен с возможностью его упора в раму. В исходном положении верхний и нижний элементы ориентированы горизонтально, а соединяющая их часть стойки наклонена в сторону движения грузонесущей ветви ленты. Шарнир стойки размещен со смещением в сторону движения грузонесущей ветви ленты относительно вертикали, проходящей через точку крепления каната к стойке. На верхнем элементе стойки установлен с возможностью смещения относительно этого элемента противовес, вес которого выбран из условия обеспечения крутящего момента, превышающего крутящий момент обратного знака, создаваемый весом стойки относительно шарнира. Параметры улавливающих устройств выбираются из следующего соотношения:
sinα[lsinβ+(b-a)]+(1-cosα)[l+(b-a)sinβ]≥h,
где α - угол отклонения от вертикали средней части стойки, град.; l - длина средней части стойки, м; β - угол наклона конвейера в зоне установки улавливающего устройства, град.; a, b - длина нижнего и верхнего элементов стойки, м; h - величина прогиба ленты канатом в момент улавливания ленты, м. Изобретение обеспечивает надежное улавливание ленты конвейера после ее обрыва с минимальными значениями тормозного пути и динамических нагрузок на элементы улавливающих устройств, при увеличенном шаге их размещения по длине конвейера. 1 з.п. ф-лы, 3 ил.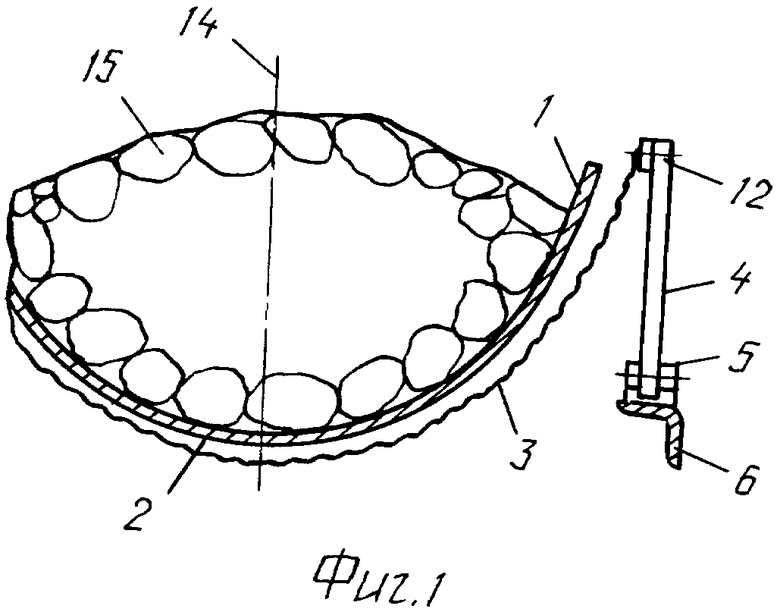
sinα[lsinβ+(b-а)]+(1-cosα)[l+(b-а)sinβ]≥h,
где α - угол отклонения от вертикали средней части стойки, град;
l - длина средней части стойки, м;
β - угол наклона конвейера в зоне установки улавливающего устройства, град;
a, b - длина нижнего и верхнего элементов стойки, м;
h - величина прогиба ленты канатом в момент улавливания ленты, м.
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2005 |
|
RU2285650C1 |
| КРУТОНАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 1998 |
|
RU2152896C2 |
| Устройство для улавливания лентыКОНВЕйЕРА B СлучАЕ EE ОбРыВА | 1979 |
|
SU829507A1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ СИСТЕМА | 2002 |
|
RU2210840C1 |

