Изобретение относится к измерительной технике и может быть использовано для определения глубины прокладки подводного кабеля в дно водоема в процессе его эксплуатации, а также трассы и глубины прокладки труб и других протяженных подводных коммуникаций.
Известен способ определения трассы и глубины укладки в дно водоема протяженных подводных сооружений, заключающийся в том, что с помощью ультразвукового сигнала сканируют дно водоема, регистрируют полученные при ультразвуковом сканировании изображения и в результате их обработки определяют трассу и глубину укладки в дно водоема протяженного подводного сооружения. Данный способ не отличается высокой точностью определения уровня заглубления подводного кабеля в дно водоема. Его реализация требует применения сложных автоматизированных систем ультразвукового сканирования и обработки изображений, стоимость которых высока. И, кроме того, данный способ не позволяет локализовать подводный кабель, проложенный вблизи более габаритного подводного сооружения, например трубопровода.
Известен способ определения глубины прокладки в дно водоема подводного кабеля, согласно которому по кабелю передают низкочастотный электромагнитный сигнал, с помощью расположенного на поверхности водоема плавсредства перемещают настроенную на эту же частоту приемную антенну над подводным кабелем вблизи дна водоема, принимаемый приемной антенной сигнал передают к блоку обработки на плавсредстве и по распределению уровней электромагнитного поля над подводным кабелем определяют трассу и глубину прокладки подводного кабеля в дно водоема, при этом вблизи дна водоема над кабелем перемещают систему из приемных всенаправленных антенн, приемные антенны распределяют в пространстве по определенной схеме, так чтобы их взаимное расположение относительно друг друга при перемещении не изменялось, к системе антенн крепят преобразователь, который соединяют с каждой из приемных антенн и через кабель управления подключают к блоку обработки на плавсредстве, в преобразователе принимают сигналы от каждой из приемных антенн, оптимизируют их параметры и последовательно передают по кабелю управления к блоку обработки, в котором запоминают уровни электромагнитного поля, принимаемые каждой из приемных антенн системы, устанавливают на плавсредстве эхолот, с помощью которого определяют расположение системы приемных антенн относительно дна водоема, по данным о расположении каждой из приемных антенн системы и принимаемых ими уровнях электромагнитных сигналов определяют распределение уровней электромагнитного поля в пространстве над подводным кабелем, по которому определяют глубину прокладки подводного кабеля в дно водоема путем сравнения максимальных значений с опорным. Погрешность определения глубины прокладки обусловлена, во-первых, погрешностями оценок расстояний от приемных антенн до поверхности дна водоема, которые во многом связаны с перемещениями антенн по вертикали при движении. Во-вторых, необходимостью учета затухания низкочастотного зондирующего сигнала вдоль кабеля при сравнении измеряемых уровней электромагнитного поля с опорным. Система антенн имеет значительные габариты, что осложняет ее применение и, как следствие, увеличивает стоимость производства работ.
Известен способ определения глубины прокладки подводного кабеля, заключающийся в том, что по кабелю передают низкочастотный электромагнитный сигнал, вблизи дна водоема перемещают над кабелем поперек его трассы прокладки расположенные одна над другой на фиксированном расстоянии по вертикали две идентичные одинаково ориентированные системы настроенных на эту же частоту магнитных датчиков, принимаемые магнитными датчиками сигналы передают к блоку обработки и определяют глубину прокладки его в дно водоема по формуле
где d - глубина прокладки кабеля в дно водоема;
D - расстояние между системами магнитных датчиков;
h - расстояние от нижней системы магнитных датчиков до поверхности дна водоема;
α=ЕH/ЕВ - отношение напряженности магнитного поля, измеренной нижней системой магнитных датчиков, к напряженности магнитного поля, измеренной верхней системой магнитных датчиков.
Основные проблемы реализации данного способа обусловлены необходимостью обеспечения строго вертикального взаимного расположения датчиков. Это сложно сделать при перемещении датчиков с плавсредства с поверхности водоема. Как следствие, возрастает погрешность определения глубины прокладки кабеля. Добиться удовлетворительного взаимного расположения датчиков можно при перемещении их над кабелем с помощью водолазов. Однако это ведет к существенному увеличению стоимости работ. Кроме того, для определения глубины прокладки кабеля необходимо знать расстояние от нижнего датчика до поверхности грунта, что требует либо привлечения водолазов, либо использования дополнительно каких-либо других способов измерения этого расстояния.
Сущностью предлагаемого изобретения является повышение точности и снижение стоимости определения глубины прокладки в дно водоема подводного кабеля.
Эта сущность достигается тем, что согласно способу определения глубины прокладки в дно водоема подводного кабеля по кабелю передают низкочастотный электромагнитный сигнал, вблизи дна водоема перемещают над кабелем поперек его трассы прокладки расположенные одна над другой на фиксированном расстоянии друг от друга две идентичные одинаково ориентированные системы настроенных на эту же частоту магнитных датчиков, принимаемые магнитными датчиками сигналы передают к блоку обработки, при этом на оси между системами магнитных датчиков размещают датчик положения, с помощью которого измеряют угол Θ отклонения этой оси от вертикали, под нижней системой магнитных датчиков размещают ультразвуковой датчик, с помощью которого измеряют расстояние от него до поверхности дна водоема h, сигналы от датчика положения и ультразвукового датчика передают к блоку обработки и определяют глубину прокладки подводного кабеля в дно водоема d по формуле

где D - расстояние между системами магнитных датчиков;
α=ЕН/ЕВ - отношение напряженности магнитного поля, измеренной нижней системой магнитных датчиков, к напряженности магнитного поля, измеренной верхней системой магнитных датчиков.
На чертеже представлена структурная схема устройства для реализации заявляемого способа.
Устройство содержит размещенные над кабелем 1 над поверхностью дна водоема 2 расположенные одна над другой на фиксированном расстоянии друг от друга две идентичные одинаково ориентированные системы настроенных на эту же частоту магнитных датчиков - нижнюю 3 и верхнюю 4, расположенный на оси между системами магнитных датчиков 3 и 4 датчик положения 5 и расположенный под нижней системой магнитных датчиков 3 ультразвуковой датчик 6, а также блок обработки 7, при этом выходы систем магнитных датчиков 3 и 4, датчика положения 5 и ультразвукового датчика 6 соединены со входом блока обработки 7.
Способ осуществляется следующим образом. По кабелю 1 передают низкочастотный электромагнитный сигнал. Сигналы, принимаемые нижней 3 и верхней 4 системами магнитных датчиков, а также сигналы от датчика положения 5 и ультразвукового датчика 6 передают к блоку обработки 7 и определяют глубину прокладки подводного кабеля в дно водоема по формуле (1).
По сравнению с прототипом предлагаемый способ обеспечивает более высокую точность определения глубины прокладки подводного кабеля в дно водоема. Это достигается за счет измерений отклонения от вертикали оси между нижней и верхней системами магнитных датчиков и введения соответствующей поправки. В отличие от прототипа предлагаемый способ предусматривает измерение расстояния от нижней системы магнитных датчиков до поверхности дна водоема, что реализуется с помощью ультразвукового датчика с учетом поправки на отклонение. Это исключает необходимость проведения водолазных работ и, тем самым, снижает стоимость определения глубины прокладки подводного кабеля в дно водоема.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАССЫ И ГЛУБИНЫ ПРОКЛАДКИ ПОДВОДНОГО КАБЕЛЯ | 2004 |
|
RU2271021C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАССЫ И ГЛУБИНЫ ПРОКЛАДКИ ПОДВОДНОГО КАБЕЛЯ | 2004 |
|
RU2285277C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАССЫ И ГЛУБИНЫ ПРОКЛАДКИ ПОДВОДНОГО КАБЕЛЯ | 2006 |
|
RU2330310C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАССЫ ПРОКЛАДКИ КАБЕЛЯ | 2006 |
|
RU2319179C1 |
| Устройство регистрации трассы прокладки кабеля в грунте | 2023 |
|
RU2811789C1 |
| СПОСОБ ПРИМЕНЕНИЯ РОЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДЗЕМНЫХ КОММУНИКАЦИЙ, ИХ ПОПЕРЕЧНОГО РАЗМЕРА И ГЛУБИНЫ ЗАЛЕГАНИЯ В ГРУНТЕ | 2017 |
|
RU2656281C1 |
| Способ регистрации кабельной трассы в грунте | 2021 |
|
RU2786685C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАССЫ ПРОКЛАДКИ И ЛОКАЛИЗАЦИИ МЕСТА ПОВРЕЖДЕНИЯ КАБЕЛЯ | 2007 |
|
RU2350974C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАССЫ ПРОКЛАДКИ И ЛОКАЛИЗАЦИИ МЕСТА ПОВРЕЖДЕНИЯ КАБЕЛЯ | 2017 |
|
RU2656283C1 |
Изобретение относится к измерительной технике. Технический результат: повышение точности и снижение стоимости. Сущность: по кабелю передают низкочастотный электромагнитный сигнал. Вблизи дна водоема перемещают над кабелем поперек его трассы прокладки расположенные одна над другой на фиксированном расстоянии друг от друга две идентичные одинаково ориентированные системы настроенных на эту же частоту магнитных датчиков. На оси между системами магнитных датчиков размещают датчик положения, с помощью которого измеряют угол Θ отклонения этой оси от вертикали. Под нижней системой магнитных датчиков размещают ультразвуковой датчик, с помощью которого измеряют расстояние от него до поверхности дна водоема h. Сигналы от магнитных датчиков, датчика положения и ультразвукового датчика передают к блоку обработки. Определяют глубину прокладки подводного кабеля d по формуле  где D - расстояние между системами магнитных датчиков; α=ЕН/ЕВ - отношение напряженности магнитного поля, измеренной нижней системой магнитных датчиков, к напряженности магнитного поля, измеренной верхней системой магнитных датчиков. 1 ил.
где D - расстояние между системами магнитных датчиков; α=ЕН/ЕВ - отношение напряженности магнитного поля, измеренной нижней системой магнитных датчиков, к напряженности магнитного поля, измеренной верхней системой магнитных датчиков. 1 ил.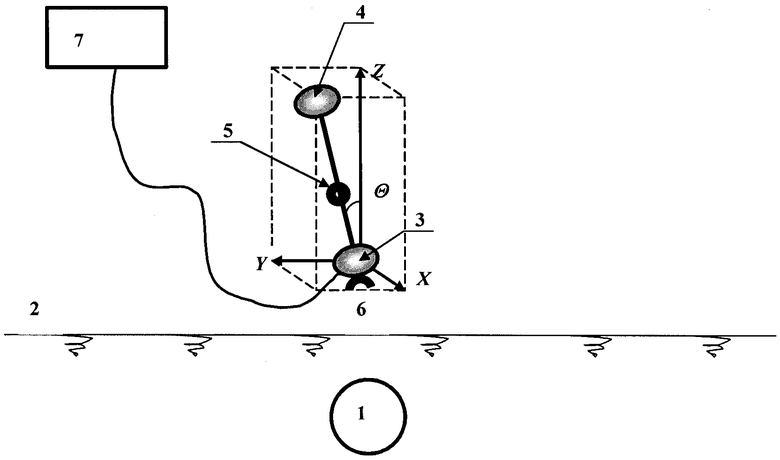
Способ определения глубины прокладки в дно водоема подводного кабеля, заключающийся в том, что по кабелю передают низкочастотный электромагнитный сигнал, вблизи дна водоема перемещают над кабелем поперек его трассы прокладки, расположенные одна над другой на фиксированном расстоянии друг от друга две идентичные одинаково ориентированные системы настроенных на эту же частоту магнитных датчиков, принимаемые магнитными датчиками сигналы передают к блоку обработки, отличающийся тем, что на оси между системами магнитных датчиков размещают датчик положения, с помощью которого измеряют угол Θ отклонения этой оси от вертикали, под нижней системой магнитных датчиков размещают ультразвуковой датчик, с помощью которого измеряют расстояние от него до поверхности дна водоема h, сигналы от датчика положения и ультразвукового датчика передают к блоку обработки и определяют глубину прокладки подводного кабеля в дно водоема d по формуле
где D - расстояние между системами магнитных датчиков;
α=EH/EB - отношение напряженности магнитного поля, измеренной нижней системой магнитных датчиков, к напряженности магнитного поля, измеренной верхней системой магнитных датчиков.
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАССЫ И ГЛУБИНЫ ПРОКЛАДКИ ПОДВОДНОГО КАБЕЛЯ | 2004 |
|
RU2271021C1 |
| RU 2004114365 А1, 27.10.2005 | |||
| US 6588980 B2, 08.07.2003 | |||
| US 6901029 B2, 31.05.2005. | |||

