Изобретение относится к измерительной технике и может быть использовано для дистанционного определения местоположения подземных коммуникаций (трубопроводов, кабелей и т.п.), их поперечного размера и глубины залегания в грунте.
Известны способы [1-7] применения и управления роем беспилотных летательных аппаратов (БПЛА), обеспечивающие безопасный полет по заданной траектории, на заданной высоте. Однако данные способы не применяются для определения местоположения подземных коммуникаций, их поперечного размера и глубины залегания в грунте.
Известны радиолокационные способы дистанционного поиска местоположения подземных коммуникаций и определения их поперечного размера и глубины залегания в грунте [8-9], заключающиеся в том, что на борту летательного аппарата помещают высокочастотный генератор импульсов и передающую антенну, приемник и принимающую антенну, блок управления антеннами, процессор с программным обеспечением и монитор, в процессе полета летательного аппарата осуществляют зондирование подповерхностного слоя земли зондирующими сигналами, принимают сигналы, отраженные от подповерхностных структур, обрабатывают и анализируют принятые сигналы и по результатам обработки определяют местоположение подземных коммуникаций, их поперечный размер и глубину залегания. Радиолокационные способы позволяют получить картину распределения подземных кабелей и труб в большом числе различных видов грунта. Однако даже в благоприятных условиях их применения необходимо иметь соответствующее представление о том, что находиться под землей, затруднительно получить требуемую интерпретацию этой картины. Сложность, высокая стоимость и зависимость от условий применения отличают реализации данных способов по сравнению с методами электромагнитной локации [10]. Необходимо отметить, что для уверенного приема отраженного сигнала требуется достаточно большая мощность передатчика, что обусловливает его значительные массогабаритные характеристики и большое энергопотребление. А это, в свою очередь, ведет к росту требований к грузоподъемности летательного аппарата и, соответственно, увеличению его стоимости и затрат на его эксплуатацию.
Известны способы электромагнитной локации для поиска трасс подземных кабелей, трубопроводов и определения глубины их залегания в грунте [10-13], заключающиеся в том, что к цепи «проводник-земля» подземного металлического сооружения подключают генератор и передают по этой цепи низкочастотный сигнал. На поверхности земли над подземным сооружением перемещают приемник с приемной антенной, измеряют уровни компонент магнитного поля и по результатам анализа изменений этих уровней определяют местоположение подземного сооружения на трассе и глубину его залегания. Используют два алгоритма поиска - по «максимуму» или по «минимуму». Для улучшения отношения сигнал/помеха и разрешающей способности применяют сдвоенные антенны. Реализация указанных способов требует определенной ориентации приемной магнитной антенны относительно подземного сооружения, что существенно ограничивает возможности размещения приемника с приемной антенной на транспортном средстве.
От этого недостатка свободен способ определения трассы прокладки и локализации места повреждения кабеля, согласно которому по кабелю передают низкочастотный электромагнитный сигнал и перемещают датчики магнитного поля по поверхности над кабелем, измеряют распределения уровней излучаемого сигнала по поверхности как двумерные функции координат на этой поверхности и определяют трассу прокладки и место повреждения кабеля по местоположению локальных экстремумов этих функций, при этом на устройстве, способном перемещаться по поверхности только по прямой и в одном направлении, закрепляют датчики компонент магнитного поля и курвиметр, на поверхности над кабелем выделяют прямоугольную область, предварительно обнуляют показания курвиметра и перемещают устройство параллельно одной из сторон этой прямоугольной области вдоль всей длины этой стороны, с помощью датчиков магнитного поля измеряют уровни компонент магнитного поля, а с помощью курвиметра – расстояние, которое прошло устройство по поверхности, запоминают результаты измерений как функции уровней компонент магнитного поля от расстояния, повторяют эту операцию многократно, каждый раз смещая устройство с известным шагом вдоль другой стороны выделенной прямоугольной области, по результатам измерений строят двумерные функции распределений уровней компонент магнитного поля на поверхности над кабелем в выделенной прямоугольной области, по местоположению локальных экстремумов которых определяют трассу и место повреждения кабеля. Реализация данного способа требует значительных трудозатрат и времени выполнения, а также относительно ровной поверхности над трассой прокладки подземного сооружения. На пересеченной местности поиск данным способом осуществить сложно. Способ не предназначен для определения глубины залегания подземного сооружения. Все это ограничивает область применения данного способа.
Сущностью предлагаемого изобретения является расширение области применения.
Эта сущность достигается тем, что согласно способу применения роя беспилотных летательных аппаратов для дистанционного определения местоположения подземных коммуникаций, их поперечного размера и глубины залегания в грунте на одном конце подземной коммуникации к ее цепи «проводник-земля» подключают генератор низких частот, устройство с датчиками компонент магнитного поля перемещают над поверхностью земли над участком, в пределах которого предположительно проложенаподземная коммуникация, определяют координаты устройства с датчиками компонент магнитного поля и при данных координатах измеряют уровни компонент магнитного поля, по результатам измерений строят двумерные функции распределений уровней компонент магнитного поля над поверхностью над подземной коммуникацией, при этом используют N устройств с датчиками компонент магнитного поля при N≥4, каждое из которых устанавливают на один из N беспилотных летательных аппаратов (БПЛА), образующих рой БПЛА, управляют этим роем БПЛА с центральной станции, под управлением которой перемещают рой БПЛА по заданной траектории с заданным взаимным расположением БПЛА по вертикали и горизонтали над поверхностью земли над участком, в пределах которого предположительно проложена подземная коммуникация, во время полета роя БПЛА фиксируют координаты каждого БПЛА, при которых по каналам связи с каждого БПЛА передают на центральную станцию данные измерений уровней компонент магнитного поля, по результатам измерений уровней компонент магнитного поля и данных о координатах БПЛА строят двумерные функции распределений уровней компонент магнитного поля над поверхностью над подземной коммуникацией для более чем двух значений высоты над поверхностью земли, по результатам обработки которых определяют местоположения подземных коммуникаций, их поперечного размера и глубины залегания в грунте.
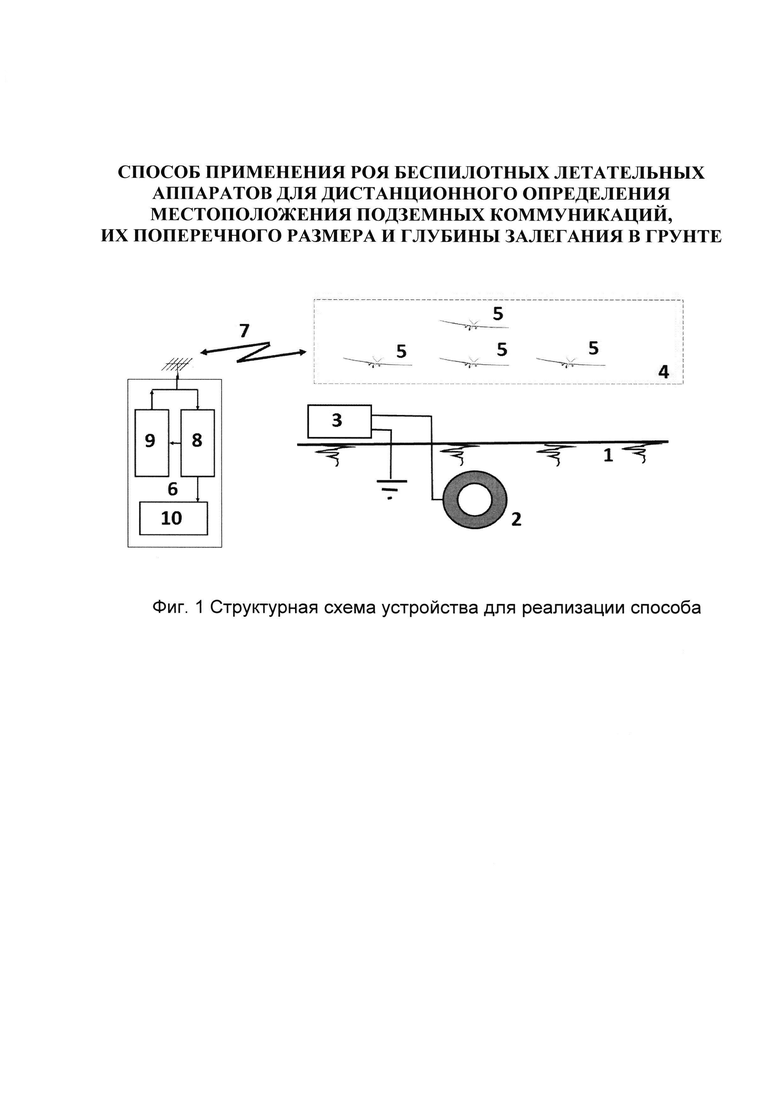
На чертеже представлена структурная схема устройства для реализации заявляемого способа.
Устройство включает проложенное ниже поверхности земли 1 подземное протяженное металлическое сооружение 2, генератор низких частот 3, рой БПЛА 4 из N≥4 БПЛА с блоком навигации и устройством с датчиками компонент магнитного поля 5, центральную станцию 6, каналы связи 7. Центральная станция включает блок обработки 8, блок управления 9 и блок отображения 10. Генератор низких частот подключен к цепи «провод-земля» подземного сооружения 2, которое проложено ниже поверхности земли 1. Центральная станция через каналы связи 7 связана с каждым из БПЛА с блоком навигации и устройством с датчиками компонент магнитного поля 5, которые объединены в рой БПЛА 4 из не менее чем четырех БПЛА с блоком навигации и устройством с датчиками компонент магнитного поля 5. К выходу центральной станции подключен выход блока управления 9 и вход блока обработки 8, выход которого соединен со входом блока отображения.
Устройство работает следующим образом. Поступающий от генератора низких частот 3 в цепь «провод-земля» подземного протяженного металлического сооружения 2 сигнал создает внешнее магнитное поле. Под управлением блока управления 9 центральной станции 6 через каналы связи 7 рой БПЛА 4 перемещается над поверхностью земли 1 на участке, на котором предположительно проложено подземное протяженное металлическое сооружение 2 по заданным траекториям, на заданных высотах при заданном взаимном расположении БПЛА с блоком навигации и устройством с датчиками компонент магнитного поля 5. Данные о координатах БПЛА с блоком навигации и устройством с датчиками компонент магнитного поля 5 и данные измерений уровней компонент магнитного поля по каналам связи 7 передаются в блок обработки 8 центральной станции 6. Полученные данные обрабатываются и по результатам обработки формируются поправки к маршруту роя БПЛА 4, которые передаются из блока обработки 8 в блок управления 9, который через каналы связи 7 корректирует траектории, высоты и взаимное расположение в рое БПЛА с блоком навигации и устройством с датчиками компонент магнитного поля 5. По результатам обработки в блоке обработки данных о координатах БПЛА с блоком навигации и устройством с датчиками компонент магнитного поля 5 и данных измерений уровней компонент магнитного поля строятся двумерные функции распределений уровней компонент магнитного поля над поверхностью над подземным сооружением для более чем двух значений высоты над поверхностью земли, по результатам обработки которых определяют местоположения подземных коммуникаций, их поперечного размера и глубины залегания в грунте. Результаты обработки передаются в блок отображения 10, на дисплее которого и отображаются.
В отличие от известного способа, которым является прототип, устройство с датчиками компонент магнитного поля перемещается с помощью БПЛА, что существенно сокращает время выполнения работ и трудоемкость по сравнению с прототипом. Особенно при выполнении работ на пересеченной местности. В отличие от известного способа, которым является прототип устройства с датчиками компонент магнитного поля располагаются над поверхностью земли как на горизонтальной плоскости, параллельно поверхности земли, так и по вертикали, и при этом траектория роя БПЛА, высота его полета над поверхностью земли и взаимное расположение БПЛА в рое могут быть изменены в зависимости от типа и параметров подземного сооружения и условий поиска, что позволяет улучшить разрешающую способность и снизить погрешности определения местоположения подземных коммуникаций, их поперечного размера и глубины залегания в грунте. В отличие от известного способа, которым является прототип, применение роя БПЛА позволяет увеличить число точек, в которых одновременно выполняются измерения уровней компонент магнитного поля и при этом снизить погрешность определения координат, что в совокупности также обеспечивает снижение погрешности определения местоположения подземных коммуникаций, их поперечного размера и глубины залегания в грунте в целом.
ЛИТЕРАТУРА
1. RU 2008/140595.
2. RU 2457531.
3. US 2014/249693.
4. US 4997144.
5. US 5340056.
6. US 5521817.
7. US 9104201.
8. RU 2256941.
9. RU 2451954.
10. От А до Я локации и поиск повреждений подземных кабелей и труб для начинающих и специалистов. Авторизованный перевод ЗАО "ПЕРГАМ" // Radiodetection, 1999, 163 с.
11. RU 2319179.
12. US 3471772.
13. US 2006/036376.
14. RU 2007/118602.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО ПОИСКА МЕСТОПОЛОЖЕНИЯ ПОДЗЕМНЫХ КОММУНИКАЦИЙ И ОПРЕДЕЛЕНИЯ ИХ ПОПЕРЕЧНОГО РАЗМЕРА И ГЛУБИНЫ ЗАЛЕГАНИЯ В ГРУНТЕ | 2017 |
|
RU2664253C1 |
| СПОСОБ ДИСТАНЦИОННОГО ПОИСКА МЕСТОПОЛОЖЕНИЯ ПОДЗЕМНЫХ КОММУНИКАЦИЙ И ОПРЕДЕЛЕНИЯ ИХ ПОПЕРЕЧНОГО РАЗМЕРА И ГЛУБИНЫ ЗАЛЕГАНИЯ В ГРУНТЕ | 2017 |
|
RU2656287C1 |
| Способ технического диагностирования заглубленных кабельных линий электропередачи с применением беспилотного летательного аппарата | 2022 |
|
RU2794393C1 |
| Устройство регистрации трассы прокладки кабеля в грунте | 2023 |
|
RU2811789C1 |
| Способ регистрации кабельной трассы в грунте | 2021 |
|
RU2786685C1 |
| Способ поиска трассы прокладки оптического кабеля | 2020 |
|
RU2755431C1 |
| Способ дистанционной диагностики магистральных трубопроводов | 2024 |
|
RU2826327C1 |
| Способ обнаружения границы локального подземного торфяного пожара и способ доставки на поверхность торфяника портативного георадара и приёма данных зондирования в режиме реального времени | 2016 |
|
RU2647221C2 |
| Дистанционная система обнаружения несанкционированных врезок в магистральные трубопроводы | 2024 |
|
RU2839501C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
Изобретение относится к измерительной технике и может быть использовано для дистанционного определения местоположения подземных коммуникаций (трубопроводов, кабелей и т.п.), их поперечного размера и глубины залегания в грунте. Способ применения роя беспилотных летательных аппаратов для дистанционного определения местоположения подземных коммуникаций, их поперечного размера и глубины залегания в грунте заключается в том, что на одном конце подземной коммуникации к ее цепи «проводник-земля» подключают генератор низких частот, устройство с датчиками компонент магнитного поля перемещают над поверхностью земли над участком, в пределах которого предположительно проложена подземная коммуникация. Затем определяют координаты устройства с датчиками компонент магнитного поля и при данных координатах измеряют уровни компонент магнитного поля, по результатам измерений строят двумерные функции распределений уровней компонент магнитного поля над поверхностью над подземной коммуникацией. При этом используют N устройств с датчиками компонент магнитного поля при N≥4, каждое из которых устанавливают на один из N беспилотных летательных аппаратов (БПЛА), образующих рой БПЛА, управляют этим роем БПЛА с центральной станции, под управлением которой перемещают рой БПЛА по заданной траектории с заданным взаимным расположением БПЛА по вертикали и горизонтали над поверхностью земли над участком, в пределах которого предположительно проложена подземная коммуникация. Во время полета роя БПЛА фиксируют координаты каждого БПЛА, при которых по каналам связи с каждого БПЛА передают на центральную станцию данные измерений уровней компонент магнитного поля, по результатам измерений уровней компонент магнитного поля и данных о координатах БПЛА строят двумерные функции распределений уровней компонент магнитного поля над поверхностью над подземной коммуникацией для более чем двух значений высоты над поверхностью земли, по результатам обработки которых определяют местоположения подземных коммуникаций, их поперечный размер и глубину залегания в грунте. Техническим результатом заявленного изобретения является расширение области применения БПЛА. 1 ил.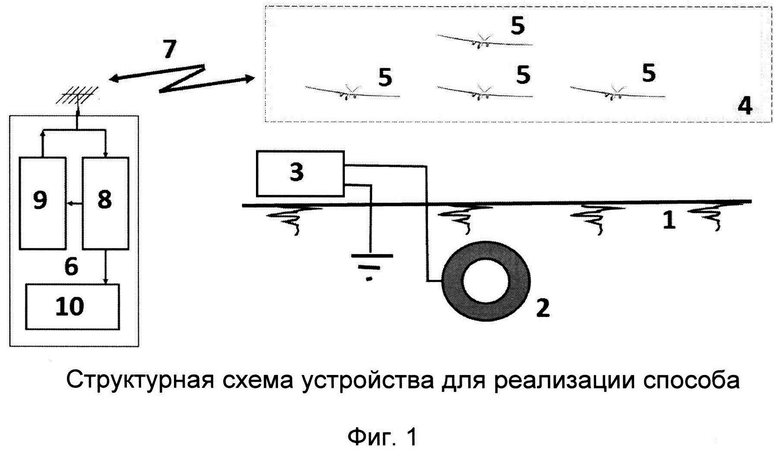
Способ применения роя беспилотных летательных аппаратов для дистанционного определения местоположения подземных коммуникаций, их поперечного размера и глубины залегания в грунте, заключающийся в том, что на одном конце подземной коммуникации к ее цепи «проводник-земля» подключают генератор низких частот, устройство с датчиками компонент магнитного поля перемещают над поверхностью земли над участком, в пределах которого предположительно проложена подземная коммуникация, определяют координаты устройства с датчиками компонент магнитного поля и при данных координатах измеряют уровни компонент магнитного поля, по результатам измерений строят двумерные функции распределений уровней компонент магнитного поля над поверхностью над подземной коммуникацией, отличающийся тем, что при этом используют N устройств с датчиками компонент магнитного поля при N≥4, каждое из которых устанавливают на один из N беспилотных летательных аппаратов (БПЛА), образующих рой БПЛА, управляют этим роем БПЛА с центральной станции, под управлением которой перемещают рой БПЛА по заданной траектории с заданным взаимным расположением БПЛА по вертикали и горизонтали над поверхностью земли над участком, в пределах которого предположительно проложена подземная коммуникация, во время полета роя БПЛА фиксируют координаты каждого БПЛА, при которых по каналам связи с каждого БПЛА передают на центральную станцию данные измерений уровней компонент магнитного поля, по результатам измерений уровней компонент магнитного поля и данных о координатах БПЛА строят двумерные функции распределений уровней компонент магнитного поля над поверхностью над подземной коммуникацией для более чем двух значений высоты над поверхностью земли, по результатам обработки которых определяют местоположения подземных коммуникаций, их поперечный размер и глубину залегания в грунте.
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАССЫ ПРОКЛАДКИ КАБЕЛЯ | 2006 |
|
RU2319179C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАССЫ И ГЛУБИНЫ ПРОКЛАДКИ ПОДВОДНОГО КАБЕЛЯ | 2004 |
|
RU2271021C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ СОСТОЯНИЯ ЛИНЕЙНОЙ ЧАСТИ ПОДЗЕМНЫХ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2013 |
|
RU2553843C2 |
| US 20160097879 A1, 07.04.2016. | |||

