Изобретение относится к области локации и связи с помощью радио или акустических средств и может быть использовано для обнаружения отраженных или связных сигналов.
Известен способ обнаружения сигнала, основанный на перемножении входного напряжения приемника с опорным напряжением, представляющим собой копию излученных передатчиком колебаний, с последующим интегрированием результата перемножения и сравнением выходного напряжения интегратора с пороговым напряжением [1]. Несовпадение частоты принимаемых сигналов с частотой излученных колебаний, возникающее, например, вследствие эффекта Доплера, приводит к ухудшению отношения сигнал/шум перед пороговым устройством и, следовательно, к ухудшению вероятностных характеристик при обнаружении сигнала.
Для обнаружения зондирующего сигнала может быть использован способ, описанный в [2], принципиально не отличающийся от вышерассмотренного. Опорное напряжение в указанном способе получают ответвлением незначительной части излучения передатчика в линию задержки. Если опорный и отраженный сигналы не совпадают по частоте или во времени, они не коррелируются, и напряжение на выходе интегратора не достигает порогового значения. Частично указанный недостаток устраняют за счет использования многоканального коррелятора. При этом применяют многоотводную линию задержки, рассчитанную на перекрытие требуемого диапазона дальности. Задачи обнаружения сигнала при доплеровском сдвиге частоты данный способ не решает.
Прототипом предлагаемого изобретения выбран способ обнаружения сигнала, основанный на доплеровском преобразовании частоты и последующем вычислении корреляционной функции [3]. Осуществление данного способа в случае широкополосной системы предполагает также предварительное сжатие сигнала во времени.
Названное сжатие сигнала, как и доплеровское преобразование частоты, не может обеспечить точной компенсации доплеровского частотного сдвига, что затрудняет реализацию способа при неполной априорной информации о вероятностных свойствах эхо-сигнала и помех. Известные из описания прототипа методы преобразования сигнала не позволяют избежать указанного недостатка.
Другой недостаток известного способа заключается в том, что сжатие сигнала во времени до осуществления корреляционной обработки затрудняет обнаружение сигнала на фоне помех.
Задачей изобретения является повышение эффективности, в частности увеличение дальности действия радиотехнических и акустических устройств, устанавливаемых на подвижных объектах.
Указанная задача решается за счет того, что в способе обнаружения сигнала, основанном на совместной обработке, например, посредством вычисления корреляционной функции принятого сигнала и опорного сигнала, который воспроизводят по копии излученного сигнала, и последующем сравнении результирующего сигнала с пороговым напряжением, перед выполнением указанной обработки сигналов преобразуют их частоту, осуществляя компенсацию различия в частоте сигналов, причиной которого, например, может быть доплеровский сдвиг частоты, при этом указанную компенсацию различия в частоте сигналов осуществляют путем мультипликативного смещения частотного спектра сигнала. Для сокращения вычислений опорный сигнал формируют в виде последовательности сегментов, сравнимых по длине с излучаемым сигналом и различающихся смещением частоты. Указанная последовательность может быть представлена в виде примыкающих друг к другу сегментов. При необходимости, если прием сигнала происходит на высокой частоте, осуществляют преобразование частоты принятого и опорного сигналов путем гетеродинирования.
Техническим результатом изобретения является осуществление способа обнаружения сигнала, обеспечивающего повышение чувствительности систем локации подвижных объектов и связи с ними при значительном увеличении скорости движения объектов и сокращении длины волны излучаемого сигнала.
Сущность изобретения рассматривается на примере обнаружения сигнала при осуществлении локации и поясняется чертежом, где представлена упрощенная блочная схема локатора.
Согласно чертежу схема содержит передатчик 1, к которому подключен мультипликативный преобразователь (МПр) 2 частотного спектра сигнала, связанный с преобразователем 3 частоты, соединенным с запоминающим устройством (ЗУ) 4 преобразованного сигнала, выход которого связан с одним из входов коррелятора 5, который подключен к пороговому устройству 6; приемник 7, соединенный с преобразователем 8 частоты, который подключен к запоминающему устройству (ЗУ) 9 принимаемого сигнала, выход которого связан с вторым входом коррелятора 5; блок управления (БУ) 10, соединенный с передатчиком 1, с МПр 2, с ЗУ 4, с ЗУ 9 и с коррелятором 5. Помимо этого, на чертеже показаны передающая антенна 11, подключенная к передатчику 1, и приемная антенна 12, связанная с входом приемника 7. Аналого-цифровые преобразователи (АЦП), которые используются для преобразования непрерывного сигнала в цифровой код (для дискретизации сигнала), а также гетеродины, смесители и фильтры, используемые в преобразователях частоты 3, 8, на чертеже не показаны.
Обнаружение отраженного сигнала в процессе локации осуществляют следующим образом.
С помощью передатчика 1 и его антенны 11 по команде БУ 10 излучают зондирующий сигнал. В рассматриваемом случае компенсацию различия в частоте сигналов предполагается осуществлять за счет изменения частотного спектра опорного сигнала. С этой целью для формирования названного сигнала напряжение с передатчика 1 подают на МПр 2, где производят мультипликативное смещение спектра сигнала путем транспонирования частоты. Если МПр 2 построен на элементах дискретного действия, предварительно преобразуют сигнал в цифровую форму с помощью АЦП. Необходимый коэффициент транспонирования частотного спектра [4] определяют в соответствии с выражением
kТ=1+2νr/c,
где νr - радиальная скорость относительного перемещения объекта; с - скорость распространения излучения ([3], с.275). Согласно приведенному выражению изменению частоты отраженного сигнала, обусловленному доплеровским сдвигом, будет соответствовать такое же изменение частоты опорного сигнала. По команде БУ 10 сигнал с выхода МПр 2 подают на преобразователь 3 частоты, где преобразуют сигнал, путем гетеродинирования понижают его частоту, затем этот сигнал подают на ЗУ 4, где осуществляют его запись. Отраженный от объекта сигнал улавливается приемной антенной 12 и подается на вход приемника 7, где он усиливается. С помощью преобразователя 8 частоты осуществляют понижение частоты принятого сигнала аналогично вышерассмотренному и производят запись сигнала в ЗУ 9. При необходимости предварительно сигнал представляют в цифровом виде. Далее по команде БУ 10 опорный сигнал с выхода ЗУ 4 и отраженный сигнал с выхода ЗУ 9 подают на входы коррелятора 5, где осуществляется вычисление взаимной корреляционной функции названных сигналов. Результат вычисления с выхода коррелятора 5 передается на пороговое устройство 6, с помощью которого при наличии максимума (пика) корреляционной функции, превышающего пороговое значение, фиксируют факт обнаружения сигнала так же, как это делается в известном способе. Мультипликативное преобразование частотного спектра (транспонирование частоты) сигнала может быть осуществлено путем монотонного смещения во времени значений последовательности (сигнала). Данный способ преобразования сигнала описан в [5]. В указанном источнике рассмотрено преобразование частоты сигнала, осуществляемое путем транспонирования спектра, в сравнении с преобразованием, выполняемым посредством гетеродинирования. Кроме названного, возможны другие варианты транспонирования частотного спектра сигналов, известные, например, из источника [4].
Очевидно, если информация о скорости движения объекта недостаточно точная, возникает необходимость многократного повторения процедуры формирования опорного сигнала (для разных значений скорости) и последующего повторения вычисления корреляционной функции. Что может потребовать значительных затрат времени.
Как правило, длительность отрезка времени, в течение которого осуществляют прием отраженного сигнала, и соответственно длительность последовательности, содержащей отраженный сигнал, гораздо больше (обычно в десятки раз) длительности излучаемого сигнала. Исходя из этого, опорный сигнал предлагается формировать в виде последовательности расположенных с интервалом или примыкающих друг к другу сегментов, с длительностью каждого, равной длительности излучаемого сигнала и различающихся величиной мультипликативного смещения спектра. Шаг смещения выбирают таким, чтобы последовательность содержала сегменты, смещение которых соответствовало бы диапазону скоростей движения объектов. При вычислении получают максимум корреляционной функции для сегмента, частотный спектр которого в наибольшей степени соответствует спектру отраженного сигнала. Для других значений аргумента (для других сегментов), ввиду отсутствия корреляции, значение указанной функции будет на уровне шума.
Мультипликативное преобразование частотного спектра путем транспонирования частоты может быть осуществлено для сигнала любой структуры. Благодаря этому для генерации зондирующего излучения возможно использование, что доказано при исследовании, не только шумоподобного сигнала, но также и стационарного случайного процесса.
Осуществимость предложенного способа при наличии современной элементной базы подтверждаются моделированием и полунатурными испытаниями, включающими вышеописанную обработку сигнала.
Источники информации
1. Радиолокационные устройства. / В.В.Васин, О.В.Власов, В.В.Григорин-Рябов и др. Под ред. В.В.Григорина-Рябова. - М.: Сов. радио, 1970, с.5-39.
2. Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. - М.: Сов. радио, 1975, с.8-54,
3. Применение цифровой обработки сигналов. / Под ред. Э.Оппенгейма. Пер. с англ. М.: Мир, 1980, с.416-422 (прототип).
4. Измерения в электронике: Справ. / В.А. Кузнецов и др. Под ред. Кузнецова В.А. М.: Энергоатомиздат, 1987. С.449-450.
5. Атнашев А.Б., Атнашев Д.А., Филиппов Д.В. Мультипликативный метод в спектрометрии сигналов. - Петербургский журнал электроники, 2002, №2, с.40-43.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ СИГНАЛА | 2004 |
|
RU2284656C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА | 2004 |
|
RU2302077C2 |
| СПОСОБ ИССЛЕДОВАНИЯ КОЛЕБАНИЙ | 2004 |
|
RU2298771C2 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА | 2011 |
|
RU2473923C1 |
| СПОСОБ ПАССИВНОЙ ЛОКАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2564995C1 |
| СПОСОБ РАДИОЛОКАЦИИ ПАССИВНЫХ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2175139C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И ДАЛЬНОСТИ ОБЪЕКТА | 2007 |
|
RU2393499C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ С ПОМОЩЬЮ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2022 |
|
RU2797148C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ НЕПОДВИЖНЫХ ОБЪЕКТОВ С ПОМОЩЬЮ ШУМОВОГО СИГНАЛА И ШУМОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, РЕАЛИЗУЮЩАЯ ДАННЫЙ СПОСОБ | 2024 |
|
RU2831136C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2002 |
|
RU2240576C2 |
Изобретение относится к области локации и связи с помощью радио или акустических средств и может быть использовано для обнаружения отраженных или связных сигналов. Достигаемый технический результат - разработка способа обнаружения сигналов, обеспечивающего повышение чувствительности систем локации подвижных объектов и связи с ними при значительном увеличении скорости движения объектов и сокращении длины волны излучаемого сигнала. Заявленный способ заключается в обнаружении сигнала по наличию превышения над пороговым значением максимума корреляционной функции принятого сигнала и опорного сигнала, который получают, используя копию излученного сигнала. Перед вычислением упомянутой корреляционной функции сигналов преобразуют их частоту, осуществляя компенсацию различия в частоте сигналов путем мультипликативного смещения частотного спектра сигналов. 1 ил.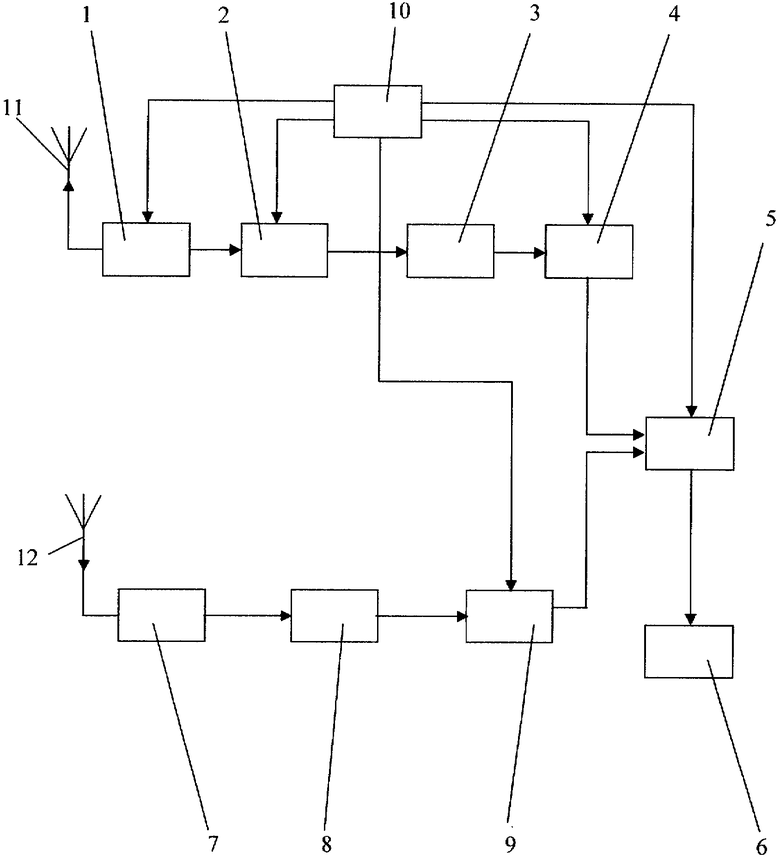
| Теоретические основы радиолокации | |||
| / Под | |||
| ред | |||
| Я.Д | |||
| Ширмана | |||
| - М.: Советское радио, 1970, с.103, 324-331, рис.6.1 (а, б), 6.2, 6.3, 6.4 (а) | |||
| RU 95110411 A1, 10.06.1997 | |||
| СПОСОБ РАДИОЛОКАЦИИ ПАССИВНЫХ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2175139C1 |

