Изобретение относится к области радиолокационной техники и может быть использовано при пассивной локации быстроперемещающихся объектов.
Известен способ пассивной локации, основанный на приеме сигналов в различных пунктах от одного и того же источника и обработке с использованием корреляционной связи процессов на входах двух приемников [1]. Данный способ не позволяет осуществлять локацию движущегося объекта, ввиду невозможности вычисления взаимной корреляционной функции (ВКФ) сигналов с различным доплеровским смещением частоты сигналов, что обусловлено различием в радиальной скорости объекта при его локации раздельно размещенными радиолокационными станциями (РЛС).
Известен также способ пассивной локации, в основу которого положен неоптимальный модуляционный прием сигнала [2]. Благодаря модуляции шумоподобного сигнала, принятого антенной, появляется возможность отделить упомянутый сигнал от шума приемника. Существенным недостатком указанного способа является сравнительно низкая чувствительность схемы, реализующей способ, по причине невозможности использования оптимальной обработки сигнала.
Наиболее близким к заявляемому способу является выбранный в качестве прототипа способ локации, основанный на приеме сигнала двумя каналами с последующим вычислением взаимной корреляционной функции сигналов [3].
Известный способ не обеспечивает локации скоростных объектов, ввиду затруднений, возникающих при вычислении ВКФ сигналов с различным доплеровским смещением частоты, что является существенным недостатком способа. Другой недостаток известного способа заключается в отсутствии возможности компенсировать шумы в каналах, ввиду того, что они коррелированы из-за наличия составляющих, одинаковых в первом и втором каналах. Это отрицательно влияет на помехозащищенность и чувствительность РЛС.
Задачей изобретения является повышение помехозащищенности и чувствительности РЛС для обеспечения возможности локации быстроперемещающихся объектов независимо от диапазона скоростей объекта и фоновой обстановки.
Поставленная задача решается тем, что в способе пассивной локации подвижного объекта, основанном на приеме сигналов, излучаемых объектом, оптимальной обработке принятых сигналов, принимают излучаемые объектом сигналы в точках, разнесенных в пространстве, преобразуют принятые сигналы в цифровой код с последующей записью, вычисляют ВКФ сигналов, принятых в разнесенных точках, предварительно осуществив компенсацию доплеровского сдвига частоты сигналов, по превышению импульсного значения корреляционной функции сигналов над порогом судят о наличии объекта в обозреваемом пространстве, при этом компенсацию доплеровского сдвига частоты принятых сигналов осуществляют путем мультипликативного преобразования частотного спектра названных сигналов, а вычисление ВКФ принятых в разнесенных точках сигналов производят многократно, варьируя величину корректирующего сдвига частоты сигнала, после вычисления ВКФ сигналов выбирают выходной сигнал с максимальным импульсным значением.
Техническим результатом изобретения является повышение эффективности пассивной локации за счет обеспечения возможности обнаружения высокоскоростных объектов в условиях действия помех.
Сущность изобретения поясняется на примере реализации способа пассивной локации подвижного объекта двумя РЛС с осуществлением коррекции доплеровского смещения частоты принятых сигналов путем транспонирования их частоты и последующей корреляционной обработке сигналов. Транспонирование частоты сигналов осуществляют, выполняя мультипликативное преобразование частотного спектра сигналов, как это показано в [4, 5].
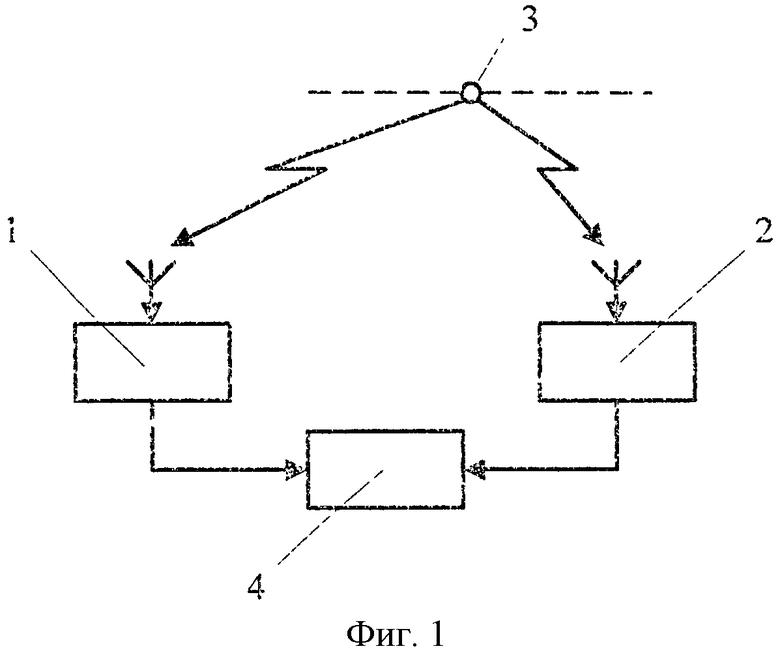
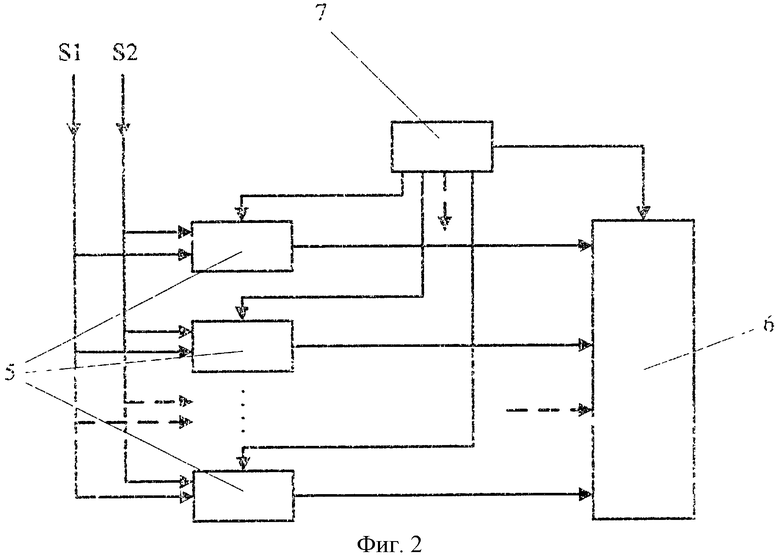
Схема, поясняющая предлагаемый способ пассивной локации объекта, представлена на фиг. 1. На фиг. 2 представлена упрощенная схема оптимальной обработки сигналов в предлагаемом способе.
На фиг. 1 показаны РЛС 1, РЛС 2, принимающие сигналы от цели 3, движущейся по траектории; устройство 4 обработки сигналов (выходной информации) РЛС 1, РЛС 2, связанное с названными РЛС.
Согласно чертежу, представленному на фиг. 2, устройство 4 обработки сигналов содержит соединенные с РЛС 1, 2 вычислители 5, (сигналы, подаваемые на входы названных устройств от РЛС, обозначены символами s1, s2); блок 6 сравнения, с которым соединены выходы вычислителей 5. Кроме того, вычислители 5, а также блок 6 сравнения подключены к устройству 7 управления. Ввиду того, что радиальная скорость объекта точно не известна, предлагается использовать многоканальную схему обработки сигналов с заданием различного значения коэффициента транспонирования частоты в каждом из каналов.
На чертеже не показаны усилители, преобразователи сигналов на промежуточную частоту, аналого-цифровые преобразователи.
Локация объекта осуществляется следующим образом.
В соответствии с чертежом, приведенным на фиг. 1, сигналы от движущейся цели 3, принимают с помощью РЛС 1 и РЛС 2 и передают в устройство 4 обработки сигналов. Переданные сигналы s1, s2 представляют в виде последовательностей и записывают. Предварительно преобразуют частоту сигналов, обычно, гетеродинированием колебаний. Задают посредством устройство 7 управления команду на обнуление временного смещения значений последовательности в названных вычислителях (см. описание, приведенное в [4]). После снятия этой команды начинается процесс обработки данной последовательности, что соответствует началу обработки принимаемых сигналов. Как следует из чертежа, углы визирования цели 3 для РЛС 1, 2 будут различными. Соответственно значения доплеровской скорости упомянутого объекта для разных РЛС также будут различны. В устройстве 4 сигналы s1, s2, передаваемые от РЛС 1, 2, дискретизируют и подают на входы вычислителей 5, где осуществляют компенсацию доплеровского смещения частоты сигналов путем транспонирования частотного спектра и вычисляют ВКФ сигналов в каждом канале. Значение коэффициента транспонирования частоты в каждом из вычислителей 5 задают, используя устройство 7 управления.
Для упрощения реализации способа осуществляют коррекцию доплеровского смещения частоты путем транспонирования частоты в тракте прохождения сигнала только одной из РЛС. Сигнал другой РЛС при вычислении ВКФ используют в качестве опорного. Задают посредством устройство 7 управления команду на окончание вычисления ВКФ, что будет соответствовать окончанию обработки сигналов. Определяют по команде, передаваемой из устройства 7 управления в блок 6 сравнения, сигнал с максимальным значением ВКФ. Длительность обработки сигналов (последовательностей) определяется временем в соответствии с заданием, которое заранее записывают в устройство 7 управления. В случае большой разницы во времени прихода от разнесенных РЛС сигналов, фрагменты которых могут быть коррелированы, при вычислении ВКФ используют запись последовательностей.
Составляющая сигнала, принимаемого от движущегося объекта, имеет доплеровский сдвиг частоты. И, что важно, сдвиг частоты сигнала, принимаемого РЛС 1, отличается от сдвига частоты сигнала, принимаемого РЛС 2, ввиду различия в радиальной скорости. Другие составляющие (шумы) не имеют названного сдвига, обусловленного движением объекта. При коррекции доплеровского сдвига частоты, необходимой для вычисления ВКФ сигналов, названные составляющие также получают частотный сдвиг, который приводит к потере их взаимной корреляционной связи. Таким образом, за счет коррекции доплеровского сдвига частоты при вычислении ВКФ отфильтровывают мешающие шумы, не только шумы приемников РЛС 1, 2, а также шумы, обусловленные прохождением сигнала по трассе «объект-РЛС 1, 2». Полезный сигнал при этом может также представлять шум. Способы компенсации (коррекции) доплеровского смещения частоты, рассмотренные в [4, 5], обеспечивают выполнение данной процедуры независимо от структуры сигнала.
Как показали предварительные расчеты и моделирование, описанная выше совокупность признаков предлагаемого способа обеспечивает решение поставленной задачи: позволяет существенно увеличить чувствительность и помехоустойчивость локационной системы, реализовать возможность пассивной локации высокоскоростного объекта в условиях действия помех.
Благодаря высокой эффективности и сравнительной простоте реализации, способ может найти широкое практическое применение.
Источники информации, использованные при составлении заявки
1. Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. - М.: Сов. радио, 1970, с. 498-501.
2. Радиолокационные устройства (теория и принципы построения). Под ред. В.В. Григорина-Рябова. - М.: Сов. радио, 1970, с. 477-479.
3. Теоретические основы радиолокации. Под ред. В.Е. Дулевича. - М.: Сов. радио, 1970, с. 549-551 (прототип).
4.Патент РФ №2302077 С2, МПК Н01В 1/04. Способ обработки сигнала // Бюл. 2006, №18.
5.Патент РФ №2326401 С2, МПК G01S 13/14, H03D 7/00. Способ обнаружения сигнала // Бюл. 2007, №16.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ С ПОМОЩЬЮ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2022 |
|
RU2797148C1 |
| СПОСОБ ОДНОЗНАЧНОГО ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ В КОГЕРЕНТНО-ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2574079C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И СЕЛЕКЦИИ ПОДВИЖНОЙ ЦЕЛИ | 2013 |
|
RU2552537C2 |
| Способ формирования и обработки зондирующего лазерного сигнала | 2015 |
|
RU2616933C2 |
| Способ пространственно-временной адаптивной обработки сигналов в моноимпульсной корабельной радиолокационной станции с активной фазированной антенной решеткой | 2018 |
|
RU2735216C2 |
| СПОСОБ ПАССИВНОЙ РАДИОЛОКАЦИИ | 2014 |
|
RU2560089C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЁТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" ПРИ ВОЗДЕЙСТВИИ УВОДЯЩЕЙ ПО СКОРОСТИ ПОМЕХИ | 2015 |
|
RU2579353C1 |
| Способ многопризнакого распознавания в многофункциональной радиолокационной станции класса летательного аппарата по принципу "самолет с турбореактивным двигателем - самолет с турбовинтовым двигателем - вертолет - ракета - беспилотный летательный аппарат" на основе совместного применения калмановской фильтрации и нейронной сети | 2024 |
|
RU2832712C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА | 2004 |
|
RU2284656C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ НЕПОДВИЖНЫХ ОБЪЕКТОВ С ПОМОЩЬЮ ШУМОВОГО СИГНАЛА И ШУМОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, РЕАЛИЗУЮЩАЯ ДАННЫЙ СПОСОБ | 2024 |
|
RU2831136C1 |
Изобретение относится к области радиолокационной техники и может быть использовано при пассивной локации быстроперемещающихся объектов. Достигаемый технический результат изобретения - повышение эффективности пассивной локации за счет увеличения чувствительности и помехоустойчивости локационной системы, реализации возможности пассивной локации высокоскоростного объекта в условиях действия помех. Сущность изобретения заключается в том, что в способе пассивной локации подвижного объекта, основанном на приеме сигналов, излучаемых объектом, оптимальной обработке принятых сигналов, принимают излучаемые объектом сигналы в разнесенных в пространстве точках, вычисляют взаимную корреляционную функцию (ВКФ) сигналов, принятых в разнесенных точках, предварительно осуществив компенсацию доплеровского сдвига частоты сигналов, по превышению импульсного значения корреляционной функции сигналов над порогом судят о наличии объекта в обозреваемом пространстве, при этом компенсацию доплеровского сдвига частоты принятых сигналов осуществляют путем мультипликативного преобразования частотного спектра названных сигналов, вычисление ВКФ принятых сигналов производят многократно, варьируя величину корректирующего сдвига частоты сигнала, после вычисления ВКФ сигналов выбирают выходной сигнал с максимальным импульсным значением. 2 з.п. ф-лы, 2 ил.
1. Способ пассивной локации подвижного объекта, основанный на приеме сигналов, излучаемых объектом, оптимальной обработке принятых сигналов, отличающийся тем, что принимают излучаемые объектом сигналы радиолокационными станциями, разнесенными в пространстве, вычисляют взаимную корреляционную функцию принятых радиолокационными станциями сигналов, предварительно осуществив транспонирование частоты в тракте прохождения сигнала одной из радиолокационных станций, сигнал другой радиолокационной станции при вычислении взаимной корреляционной функции используют в качестве опорного, по превышению импульсного значения корреляционной функции сигналов над порогом судят о наличии объекта в обозреваемом пространстве.
2. Способ по п. 1, отличающийся тем, что транспонирование частоты в тракте прохождения сигнала радиолокационной станции осуществляют путем мультипликативного преобразования частотного спектра сигнала.
3. Способ по п. 1 или 2, отличающийся тем, что вычисление взаимной корреляционной функции сигналов, принятых радиолокационными станциями, разнесенными в пространстве, осуществляют многократно, варьируя значение коэффициента транспонирования частоты сигнала, после вычисления взаимной корреляционной функции сигналов выбирают выходной сигнал с максимальным импульсным значением.
| Теоретические основы радиолокации | |||
| Под ред | |||
| ДУЛЕВИЧА В.Е., Москва, Советское радио, 1970 | |||
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ СНЕГООЧИСТИТЕЛЬ ДЛЯ ЖЕЛЕЗНЫХ ДОРОГ | 1922 |
|
SU549A1 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛА | 2005 |
|
RU2326401C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА | 2004 |
|
RU2302077C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА | 2004 |
|
RU2284656C2 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛА | 2005 |
|
RU2326401C2 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2309431C1 |
| US 20090073026 A1, 19.03.2009 | |||
| US 7119732 B1, 10.10.2006 | |||
| WO 2001001168 A2, 04.01.2001 | |||

