Изобретение относится к области локации и может быть использовано для оптимальной обработки сигналов преимущественно с линейной частотной модуляцией (ЛЧМ), отраженных от объектов, имеющих высокую относительную скорость перемещения.
Известен способ оптимальной обработки ЛЧМ сигнала [1] посредством дисперсионных фильтров, основанный на сжатии длительности импульса. В качестве названных фильтров чаще всего используются дисперсионные линии задержки, для которых характерны большие потери и отсутствие возможности в большинстве случаев управления коэффициентом сжатия.
Известен также способ обработки сигнала [2], основанный на использовании согласованного фильтра. В случае локации объектов, двигающихся с высокой скоростью, при отсутствии доплеровской коррекции колебаний ввиду изменения временного масштаба принимаемого сигнала пиковое значение сигнала на выходе согласованного фильтра существенно уменьшается.
Прототипом предлагаемого изобретения выбран способ обработки сигнала, основанный на компенсации доплеровского сдвига частоты принятого сигнала, осуществляемой путем транспонирования (мультипликативного переноса) частотного спектра колебаний [3]. Посредством последующего вычисления корреляционной функции осуществляют оптимальную фильтрацию и анализ полученных колебаний. При транспонировании спектра в результате изменения временного масштаба сигнала каждая составляющая спектра умножается на коэффициент транспонирования частоты ktr, имеющий постоянное значение в процессе указанного преобразования сигнала.
Описанный способ не может быть применен для компенсации девиации частоты ЛЧМ сигнала, ввиду того что при преобразовании сигнала используется постоянный коэффициент ktr. Это препятствует осуществлению оптимальной обработки названного сигнала путем спектрального анализа полученных в результате преобразования колебаний. Отсутствие возможности компенсации девиации частоты ЛЧМ сигнала, исключающее применение частотного анализа при обработке сигнала, является недостатком известного способа.
Задачей изобретения является улучшение помехоустойчивости системы локации и достижение лучшей селекции объектов за счет повышения эффективности обработки сигнала.
Указанная задача решается за счет того, что в способе обработки радиолокационного сигнала, основанном на преобразовании частотного спектра сигнала, на транспонировании частоты и анализе полученных колебаний, осуществляют мультипликативное преобразование частотного спектра сигнала, варьируют в процессе преобразования сигнала коэффициент транспонирования частоты колебаний, компенсируют изменение частоты сигнала, осуществляя мультипликативное преобразование частотного спектра сигнала при различных вариациях коэффициента транспонирования частоты колебаний, перекрывают предполагаемый диапазон изменений частоты сигнала, по значению частоты, соответствующему максимуму амплитудного частотного спектра колебаний, определяют дальность до объекта, а по разности девиации частоты принятого и излученного сигналов определяют величину доплеровского сдвига частоты сигнала и скорость движения объекта.
Техническим результатом изобретения является повышение чувствительности, увеличение разрешения и улучшение помехоустойчивости системы локации объектов, двигающихся с высокой относительной скоростью.
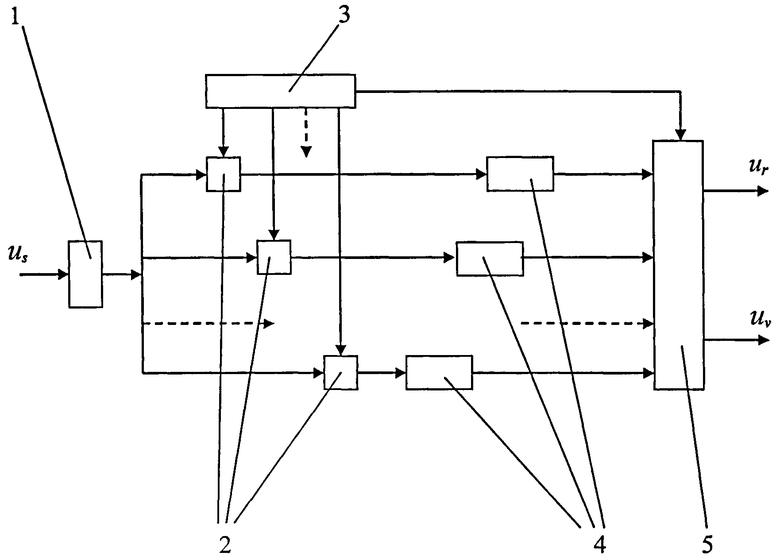
Сущность изобретения рассматривается на примере обработки отраженного от объекта ЛЧМ сигнала и поясняется чертежом, где представлена упрощенная схема преобразования и сжатия сигнала.
Согласно чертежу схема содержит входное устройство 1, к которому подключены мультипликативные преобразователи 2, управляющие входы которых связаны с устройством управления (УУ) 3, а выходы соединены со спектральными анализаторами (СА) 4, связанными с входами вычислительного устройства (ВУ) 5, которое соединено с УУ 3. Таким образом, схема содержит несколько параллельных каналов, каждый из которых включает мультипликативный преобразователь 2 и спектральный анализатор 4. Помимо этого мультипликативные преобразователи 2 непосредственно связаны с другими устройствами системы радиолокации, например с угломерным каналом (не показано). На чертеже также обозначены us - принятый сигнал, ur, uv - выходные сигналы ВУ 5. Вышеназванные мультипликативные преобразователи 2 представляют собой устройства, построенные на основе процессора, реализующего алгоритм, описанный в [3].
Обработку принятого сигнала в процессе локации осуществляют следующим образом.
Принятый сигнал Us подают на входное устройство 1, где его преобразуют путем гетеродинирования и дискретизации. Затем сигнал подают на входы мультипликативных преобразователей 2, с помощью которых осуществляют транспонирование частотного спектра сигнала аналогично тому, как это осуществляется в [3]. Одновременно на управляющие входы названных мультипликативных преобразователей 2 подают сигналы с УУ 3, посредством которых задают значение вариации коэффициента ktr для каждого мультипликативного преобразователя, отличное от других. Наличие связи мультипликативных преобразователей 2 с УУ 3 позволяет изменять значение вышеупомянутого коэффициента ktr в процессе мультипликативного преобразования сигнала. Благодаря управлению мультипликативными преобразователями 2 можно получить нарастающий (убывающий) компенсирующий сдвиг частоты в процессе преобразования сигнала. Если компенсирующий сдвиг равен изменению частоты ЛЧМ сигнала, на выходе данного мультипликативного преобразователя 2 получают сигнал постоянной частоты. С выходов мультипликативных преобразователей 2 сигналы подают на СА 4, а затем на вычислительное устройство 5, где по аналогии с измерениями, описанными в [4], по амплитуде выходного сигнала СА 4 определяют канал и соответственно мультипликативный преобразователь, на выходе которого имеется сигнал с постоянной (или с минимальным по отклонению от постоянного значения) частотой. По уровню сигнала на выходе СА 4 судят о наличии объекта в обозреваемом пространстве. По значению частоты сигнала, соответствующему максимуму амплитудного частотного спектра колебаний, определяют дальность до объекта и формируют выходной сигнал ur. Кроме того, сигнал с указанного мультипликативного преобразователя подают на соединенные с ним устройства системы. По величине вариации коэффициента ktr в данном мультипликативном преобразователе определяют девиацию частоты принятого сигнала. Сравнивают полученное значение с параметром, соответствующим девиации частоты, излучаемого сигнала, передаваемого из УУ 3. По величине приращения названного параметра определяют доплеровский сдвиг частоты, радиальную скорость объекта и формируют соответствующий сигнал uv на выходе вычислительного устройства 5.
Моделирование описанного процесса обработки сигнала на компьютере показало не только возможность реализации, но и высокую эффективность предлагаемого способа.
Основанный на спектральном анализе данный способ обработки сигнала обладает высокой чувствительностью. Вместе с тем использование широкополосного сигнала позволяет повысить помехозащищенность систем радиолокации, существенно улучшить разрешение по дальности, обеспечить достоверность идентификации и возможность селекции объектов, двигающихся с высокой скоростью.
Источники информации
1. Лезин Ю.С. Введение в теорию и технику радиотехнических систем. - М.: Радио и связь, 1986. с.158-175.
2. Кук Ч., Бернфельд М. Радиолокационные сигналы. Пер. с англ. - М.: Сов. Радио, 1971, с.310-313.
3. Патент RU 2302077 C2, МПК Н04В 1/04. Способ обработки сигнала // Б.И. 2007, №18. 2 с. (прототип).
4. Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. - М.: Сов. Радио, 1975, с.84-85.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ СИГНАЛА | 2004 |
|
RU2284656C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА | 2004 |
|
RU2302077C2 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛА | 2005 |
|
RU2326401C2 |
| СПОСОБ ИССЛЕДОВАНИЯ КОЛЕБАНИЙ | 2004 |
|
RU2298771C2 |
| СПОСОБ РАДИОЛОКАЦИИ ПАССИВНЫХ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2175139C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И ДАЛЬНОСТИ ОБЪЕКТА | 2007 |
|
RU2393499C2 |
| СПОСОБ ПАССИВНОЙ ЛОКАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2564995C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ С ПОМОЩЬЮ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2022 |
|
RU2797148C1 |
| Способ радиолокационного моноимпульсного измерения дальности и радиальной скорости целей при зондировании сигналом с линейной частотной модуляцией | 2022 |
|
RU2796220C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И СЕЛЕКЦИИ ПОДВИЖНОЙ ЦЕЛИ | 2013 |
|
RU2552537C2 |
Изобретение может быть использовано для оптимальной обработки сигналов с линейной частотной модуляцией. Сущность изобретения заключается в том, что в способе обработки радиолокационного сигнала, основанном на преобразовании частотного спектра сигнала путем транспонировании частоты, осуществляют мультипликативное преобразование частотного спектра сигнала, варьируют в процессе преобразования сигнала коэффициент транспонирования частоты колебаний, компенсируют изменение частоты сигнала, осуществляют спектральный анализ полученных колебаний, по значению частоты, соответствующему максимуму амплитудного частотного спектра колебаний, определяют дальность до объекта, по разности девиации частоты принятого и излученного сигналов определяют величину доплеровского сдвига частоты сигнала и скорость движения объекта. Достигаемый технический результат - создание систем радиолокации с высокой чувствительностью, использование широкополосного сигнала позволяет повысить помехозащищенность системы, существенно улучшить разрешение по дальности, обеспечить достоверность идентификации и возможность селекции объектов, двигающихся с высокой скоростью. 1 з.п. ф-лы, 1 ил.
1. Способ обработки радиолокационного сигнала, основанный на преобразовании частотного спектра сигнала, на транспонировании частоты и анализе полученных колебаний, отличающийся тем, что осуществляют мультипликативное преобразование частотного спектра сигнала, задавая значение изменения коэффициента транспонирования частоты колебаний, получают нарастающий или убывающий сдвиг частоты, за счет которого компенсируют изменение частоты колебаний, при этом в результате спектрального анализа полученного сигнала по уровню сигнала судят о наличии объекта в обозреваемом пространстве, по значению частоты, соответствующему максимуму амплитудного частотного спектра колебаний, определяют дальность до объекта.
2. Способ по п.1, отличающийся тем, что мультипликативное преобразование частотного спектра сигнала осуществляют в нескольких параллельных каналах, перекрывая предполагаемый диапазон изменений частоты сигнала, при этом в результате спектрального анализа определяют канал, на выходе которого имеется сигнал с постоянной частотой или с минимальным отклонением частоты от постоянного значения, по значению частоты сигнала определяют дальность до объекта, по разности изменения частоты принятого и излученного сигналов определяют величину доплеровского сдвига частоты сигнала и скорость движения объекта.
| СПОСОБ ОБРАБОТКИ СИГНАЛА | 2004 |
|
RU2302077C2 |
| Дверной замок с применением поворотного ригеля | 1948 |
|
SU76530A1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА | 2004 |
|
RU2284656C2 |
| RU 2004115374 A, 10.11.2005 | |||
| МУЛЬТИПЛИКАТИВНОЕ УСТРОЙСТВО ЗАЩИТЫ ОТ ШИРОКОПОЛОСНЫХ ЧАСТОТНО-МОДУЛИРОВАННЫХ ПОМЕХ | 2007 |
|
RU2336632C1 |
| Способ производства искусственных полимеризующихся смол | 1933 |
|
SU41185A1 |
| WO 2010060651 A1, 03.06.2010 | |||
| US 5343203 A, 30.08.1994. | |||

