Изобретение относится к средства безопасности, конкретно - к системам видеонаблюдения.
Известно устройство для видеонаблюдения с автомобиля по патенту РФ на изобретение №2270111. Устройство содержит видеокамеру, установленную на автомобиле, канал передачи изображения, устройство ввода изображения и устройство воспроизведения изображения, соединенные последовательно. Первый выход устройства ввода изображения соединен с первым входом устройства воспроизведения изображения и массой автомобиля. Дополнительно система снабжена фильтром и ключом, при этом второй выход устройства ввода изображения соединен со вторым входом устройства воспроизведения изображения и выходом фильтра, вход которого через ключ подсоединен к бортовой сети. Видеокамера установлена на стороне автомобиля, ближайшей к полосе встречного движения. Оптическая ось видеокамеры параллельна продольной оси автомобиля. Технический результат заключается в повышении эксплуатационной безопасности, снижении аварийности на дорогах, расширении ассортимента устройств контроля бокового пространства автомобиля, а также в расширении области применения систем теленаблюдения.
Недостаток - низкий уровень безопасности.
Известен телевизионный способ поиска и видеонаблюдения объекта, по заявке РФ на изобретение №2002114606, прототип, заключающийся в том, что на командном пункте формируют и запоминают в компьютерной базе данных опорную информацию, формируют с помощью беспилотного управляемого летательного аппарата, координаты которого определяют глобальной навигационной системой и на котором установлена соответствующая видеоаппаратура, изображение выбранной географической области земли, формируют видеоинформацию, определяющую характеристики сформированного изображения выбранной географической области земли, и запоминают видеоинформацию, определяют наличие объекта путем сравнения запомненной видеоинформации с запомненной в компьютерной базе данных опорной информацией, отличающийся тем, что видеонаблюдение за объектом осуществляют путем сравнения текущей запоминаемой видеоинформации с предыдущей запомненной видеоинформацией, в качестве опорной информации использованы наперед заданные данные о характеристиках объекта, в качестве беспилотного управляемого летательного аппарата использован беспилотный программно управляемый летательный аппарат, на котором установлен дополнительно бортовой микропроцессор и характеристики полета которого от взлета до посадки формируют и запоминают в компьютерной базе данных командного пункта и в бортовом микропроцессоре перед полетом, после взлета беспилотного программно управляемого летательного аппарата изображение выбранной географической области земли формируют вдоль маршрута полета по нормали к плоскости полета беспилотного программно управляемого летательного аппарата, на командном пункте по определенным координатам беспилотного программно управляемого летательного аппарата определяют координаты объекта.
Эта телевизионная система поиска и видеонаблюдения объекта содержит на беспилотном управляемом летательном аппарате (транспортном средстве) средство отображения, средство управления, включающее управляющий процессор и распределитель сигнала, соединенное со средством отображения, приемник глобальной навигационной системы и приемопередатчик, соединенные со средством управления, при этом средство управления соединено также с рулями беспилотного управляемого летательного аппарата, с блоками памяти и обработки видеоинформации, с блоками памяти и обработки управляющих команд, на командном пункте - приемник глобальной навигационной системы и приемопередатчик, соединенные с блоком предварительной обработки, который через общую шину соединен с блоками памяти видеоинформации, блоками обработки видеоинформации, процессором связи и дисплейным процессором, к которому подключен, по крайней мере, один дисплей, и блок телеуправления с пультом управления, отличающаяся тем, что на командном пункте введены подключенные к общей шине блок памяти координат беспилотного управляемого летательного аппарата, блок памяти опорной видеоинформации, блок памяти характеристик полета, процессор управления на беспилотном управляемом летательном аппарате, который выполнен в виде беспилотного программно управляемого летательного аппарата, введены подключенные к средству управления блок памяти характеристик полета, ультразвуковой датчик высоты, датчик воздушной скорости, датчик барометрической высоты и гироскопы диапазонов тангажа, разворота и скольжения, при этом оптическая ось средства отображения расположена по нормали к плоскости полета беспилотного программно управляемого летательного аппарата.
Недостатками системы является низкий уровень автоматизации процесса видеонаблюдения и низкая безопасность охраняемого объекта на контролируемой территории, невозможность выделить потенциально опасные объекты и сосредоточить наблюдение за ними.
Задачами создания изобретения является полная автоматизация процесса обеспечения безопасности контролируемой территории и повышение уровня безопасности.
Решение указанных задач достигнуто за счет того, что в способе видеонаблюдения с транспортного средства, находящегося в движении и оборудованного видеокамерой, подключенной через плату видеоввода к компьютеру, имеющему связь с применением приемно-передающего устройства транспортного средства по радиоканалу связи с приемно-передающим устройством и компьютером командного пункта, заключающийся в том, что на командном пункте формируют и запоминают в компьютерной базе данных опорную информацию контролируемой территории с выделением одной или нескольких реперных точек, для которых вводят точные координаты, формируют с помощью видеокамеры видеоизображения выделенных объектов и определяют их координаты относительно реперной точки, отличающийся тем, что при движении транспортного средства определят его координаты, скорость и направление движения, осуществляют сравнение текущей запоминаемой видеоинформации о скорости и направлении перемещения выделенных объектов с предыдущей запомненной видеоинформацией, в качестве опорной информации используют заданные данные характеристики контролируемой территории, а координаты выделенных объектов и скорость их перемещения определяют с учетом направления и скорости перемещения транспортного средства. В процессе видеонаблюдения выделяют объекты, имеющие максимальную скорость и нежелательное направление перемещения. Координаты транспортного средства определяют с помощью глобальной навигационной системы.
Решение указанных задач достигнуто в системе видеонаблюдения с транспортного средства, находящегося в движении, содержащей установленную на транспортном средстве видеокамеру, подключенную через плату видеоввода к компьютеру, к которому подключено приемно-передающее устройство транспортного средства, обеспечивающее связь по радиоканалу через приемно-передающее устройство командного пункта с компьютером командного пункта, отличающаяся тем, что на транспортном средстве установлен датчики измерения скорости и направления его перемещения, соединенные с компьютером. Видеокамера оборудована приводами горизонтального и вертикального перемещения, подключенными к компьютеру. Видеокамера установлена на демпфирующей подвеске. Система видеонаблюдения может содержать дополнительно одну или несколько видеокамер, подключенных к компьютеру через мультиплексор.
Предложенное техническое решение обладает новизной, изобретательским уровнем и промышленной применимостью, т.е всеми критериями изобретения. Новизна и изобретательский уровень подтверждены патентными исследованиями, а промышленная применимость обусловлена тем, что для реализации способа и системы необходимы серийно выпускаемые недифицитные компоненты: компьютеры типа «Пентиум», видеокамеры, передатчики и т.д.
Сущность изобретения поясняется на чертежах (фиг.1...3), где:
на фиг.1 приведена схема устройства,
на фиг.2 приведена схема устройства с несколькими видеокамерами,
на фиг.3 - алгоритм способа.
На транспортном средстве 1 (фиг.1) установлены видеокамера 2, подключенная через плату видеоввода 3 к компьютеру 4 (процессору компьютера), к которому подключен монитор 5 и приемно-передающее устройство транспортного средства 6 с антенной 7. К компьютеру 4 также подключены датчик скорости движения 8 (спидометр) и датчик направления движения 9 (компас или гироскоп). Видеокамера 2 также оборудована приводом горизонтального и вертикального поворота 10. На контролируемой территории 11 находится по крайней мере одна реперная точка 12 и несколько объектов 13. Объекты 13 могут перемещаться. На командном пункте 14 находится компьютер командного пункта 15 (системный блок или сервер), к которому подключен монитор наблюдения 16 и приемно-передающее устройство командного пункта 17 с антенной командного пункта 18. Связь между антенной 7 и антенной командного пункта осуществляется по радиоканалу связи 19.
Возможно применение для видеонаблюдения нескольких видеокамер (фиг.2), установленных на транспортном средстве 1. В этом случае к компьютеру 4 через мультиплексор 20 подключают одну или несколько дополнительных видеокамер 21.
При работе транспортное средство 1, заранее оборудованное компонентами, приведенными на фиг.1 или 2, выезжает на контролируемую территорию 11 (площадь, улица и т.д.). В компьютер 4 устанавливают управляющую программу и опорную информацию контролируемой территории (карту, схему с координатами стационарных объектов с выделением реперной точки 13, т.е. одного из стационарных объектов, который легко может быть идентифицирован. Включают видеокамеру 2, которая фиксирует объекты 13, выделяет из них необходимые для дальнейшего усиленного контроля. При этом выделяют объекты, либо имеющие максимальную скорость перемещения, либо направление перемещения в сторону охраняемого объекта. Для выделенных (потенциально опасных) объектов 13 определяют координаты, скорости и направление перемещения. При этом делают поправку на скорость и направление перемещения транспортного средства 1. Координаты выделенных объектов и скорости их перемещения постоянно сравнивают с предыдущей запомненной информацией и делают вывод о потенциальном увеличении опасности выделенного объекта, если его скорость увеличивается, а направление меняется в сторону охраняемого объекта.
Применение изобретения позволило: полностью автоматизировать процесс обеспечения безопасности контролируемой территории, выявлять потенциально опасные объекты и повысить уровень безопасности охраняемого объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ ЛИНЕЙНОГО УЧАСТКА ГРАНИЦЫ | 2011 |
|
RU2460142C1 |
| СИСТЕМА ЗАЩИТЫ ГРАНИЦЫ ОХРАНЯЕМОЙ ТЕРРИТОРИИ | 2006 |
|
RU2365857C2 |
| СПОСОБ И СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ АЭРОПОРТА | 2011 |
|
RU2463664C1 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ С ТРАНСПОРТНОГО СРЕДСТВА, НАХОДЯЩЕГОСЯ В ДВИЖЕНИИ | 2015 |
|
RU2678688C2 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ С ТРАНСПОРТНОГО СРЕДСТВА, НАХОДЯЩЕГОСЯ В ДВИЖЕНИИ | 2015 |
|
RU2626251C2 |
| КОМПЛЕКС ОБЕСПЕЧЕНИЯ РАДИОСВЯЗИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) НА ТЕРРИТОРИИ С РАЗРУШЕННОЙ ИНФРАСТРУКТУРОЙ СВЯЗИ В ЗОНАХ СТИХИЙНОГО БЕДСТВИЯ И ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2013 |
|
RU2554517C2 |
| СИСТЕМА ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2387080C1 |
| СПОСОБ И СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ОХРАНОЙ И ОБОРОНОЙ ПОГРАНИЧНОЙ ЗАСТАВЫ И МИНА С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2336487C1 |
| СПОСОБ И УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ МОСТА | 2015 |
|
RU2598803C1 |
| СИСТЕМА РАЗДЕЛЬНОГО СБОРА И ТРАНСПОРТИРОВКИ МУСОРА | 2014 |
|
RU2638531C2 |


Группа изобретений относится к обеспечению безопасности на контролируемой территории. Видеонаблюдение осуществляется с транспортного средства (ТС), находящегося в движении и оборудованного видеокамерой, подключенной через плату видеоввода к компьютеру. Данное ТС посредством приемно-передающего устройства имеет радиоканальную связь с приемно-передающим устройством и компьютером командного пункта. На последнем формируют и запоминают в компьютерной базе данных опорную информацию контролируемой территории с выделением одной или нескольких реперных точек, для которых вводят точные координаты. С помощью видеокамеры формируют видеоизображения выделенных объектов и определяют их координаты относительно реперной точки. При движении ТС определяют его координаты, скорость и направление движения, осуществляют сравнение текущей запоминаемой видеоинформации о скорости и направлении перемещения выделенных объектов с предыдущей запомненной видеоинформацией. В качестве опорной информации используют заданные данные характеристики контролируемой территории, а координаты выделенных объектов и скорость их перемещения определяют с учетом направления и скорости перемещения ТС. В процессе видеонаблюдения выделяют объекты, имеющие максимальную скорость и нежелательное направление перемещения. Группа изобретений позволяет осуществить полную автоматизацию процесса обеспечения безопасности контролируемой территории и повысить уровень безопасности. 2 н. и 4 з.п. ф-лы, 3 ил.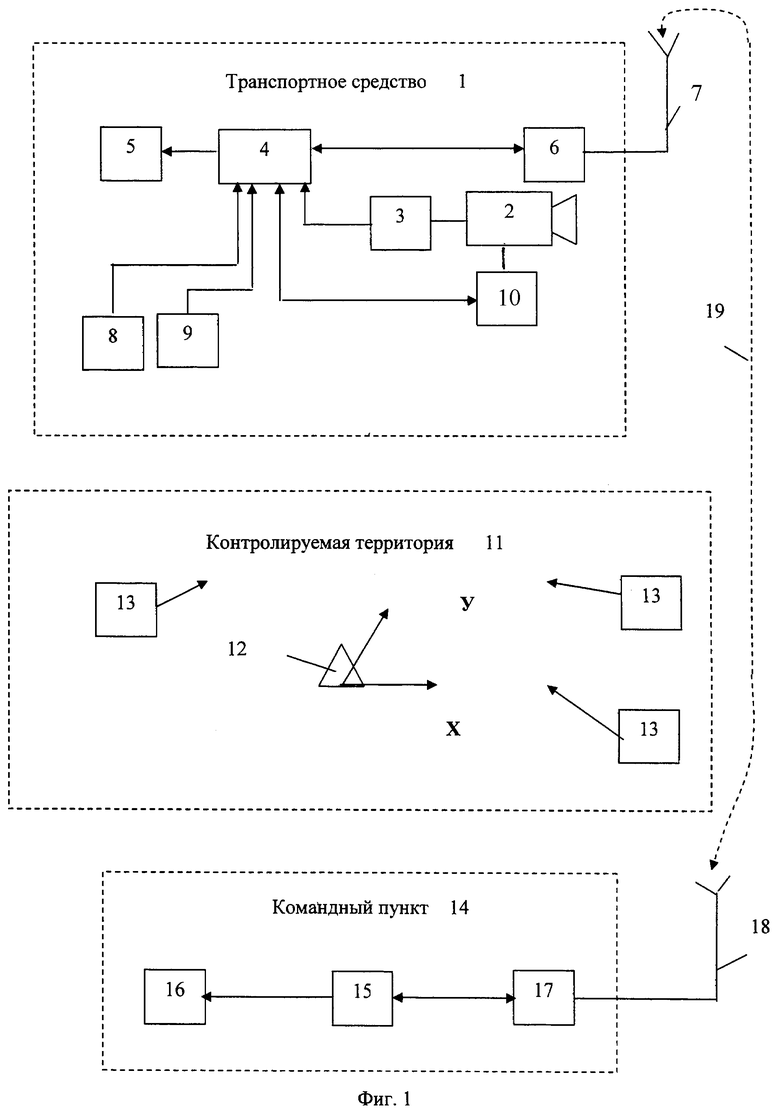
| RU 2002114606 А, 27.05.2004 | |||
| СИСТЕМА ТЕЛЕНАБЛЮДЕНИЯ ДЛЯ АВТОМОБИЛЯ | 2004 |
|
RU2270111C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2004 |
|
RU2248307C1 |

