Изобретение относится к военной технике, в частности к области плавающих бронированных машин, предназначенных для выполнения различных задач в качестве средств боевого применения и средств обеспечения, например при проведении десантных операций на море и широких водных преградах.
Известна плавающая бронированная машина, предназначенная для решения различных задач при ведении боевых действий и способная преодолевать водные преграды на плаву в полностью погруженном положении (патент РФ №2170676, кл. В60F 3/00; F41Н 7/00, 2001), что обеспечивает снижение заметности и повышение защищенности от противотанковых средств. Машина оснащена воздухопитающей трубой, обеспечивающей сообщение заброневого объема корпуса с атмосферой при движении на плаву, датчиками глубины погружения, надувными поплавками, каждый из которых снабжен впускным и выпускным клапанами, и пороговым устройством с зоной нечувствительности, компрессором и системой видеонаблюдения. Преодоление водных преград осуществляется в погруженном положении, водоизмещение корпуса используется полностью, и поддержание машины на плаву обеспечивается суммарным объемом надувных поплавков, наполнение которых изменяется при выходе глубины погружения за пределы допуска, заданного зонами нечувствительности пороговых устройств. Таким образом осуществляется сохранение определенной глубины погружения и стабилизация по углам крена и дифферента.
Известная бронированная машина характеризуется следующими недостатками:
- обязательное применение системы сообщения заброневого объема корпуса с атмосферой (наличие воздухопитающей трубы) при движении на плаву является демаскирующим признаком, влияющим на достижение ожидаемого результата (снижение заметности, повышение защищенности);
- принятая система регулирования глубины погружения и угловой стабилизации путем изменения наполнения надувных поплавков характеризуется значительной инерционностью вследствие сжимаемости газа;
- неисправности и повреждения системы регулирования глубины погружения и угловой стабилизации могут привести к гибели машины и экипажа, чему также способствует полное использование водоизмещения корпуса (отсутствие запаса плавучести);
- недостаточная надежность надувных поплавков вследствие склонности к повреждениям различного характера;
- надувные поплавки увеличивают габариты машины и гидродинамическое сопротивление движению.
Известна принятая в качестве ближайшего аналога (прототипа) плавающая бронированная гусеничная машина ИПР (инженерный подводный разведчик), являющаяся армейским средством инженерного вооружения и предназначенная для инженерной разведки водных преград и выполнения подводных инженерных работ (Федосеев С.Л. Боевые машины пехоты: Иллюстрированный справочник. - М.: ООО «Издательство Астрель»: ООО «Издательство ACT», 2001; «Техника и вооружение» №4/2001). Машина приспособлена для движения и работы как в надводном, так и в полностью погруженном положениях. Поддержание на плаву в надводном положении обеспечивается водоизмещением корпуса, в качестве водоходного движителя применяются два откидных гребных винта в направляющих насадках. Погружение ИПР осуществляется путем заполнения балластных цистерн забортной водой, всплытие - осушением. Максимальная глубина погружения при выполнении подводных работ составляет 8 м, допускается краткосрочное погружение на глубину до 15 м. Движение ИПР после погружения осуществляется по дну с помощью гусеничного движителя. Машина оснащена воздухопитающей трубой, обеспечивающей сообщение заброневого объема корпуса с атмосферой при нахождении в погруженном положении, шлюзовой камерой для выхода водолаза-разведчика, регенератором воздуха, гидролокатором, навигационной аппаратурой и другим специальным оборудованием.
Известная плавающая бронированная гусеничная машина характеризуется следующими недостатками:
- обязательное применение системы сообщения заброневого объема корпуса с атмосферой (наличие воздухопитающей трубы) при работе в погруженном положении является демаскирующим фактором;
- невозможность движения на плаву в погруженном положении (без контакта сухопутного движителя с грунтом дна) вследствие отсутствия систем регулирования глубины погружения и угловой стабилизации;
- наличие ограничений по глубине водной преграды;
- недостаточная подвижность в погруженном положении, обусловленная низким удельным давлением на грунт дна вследствие малой разницы между объемом балластных цистерн и запасом плавучести.
Целью изобретения является обеспечение максимальной скрытности и защищенности плавающей бронированной гусеничной машины при преодолении водных преград, а также независимости от глубины водной преграды и свойств грунта дна путем введения возможности работы при нулевом запасе плавучести в полностью автономном режиме без сообщения заброневого объема корпуса с атмосферой.
Указанная цель реализуется путем оснащения плавающей бронированной гусеничной машины, содержащей герметичный корпус, водоходные движители, систему сообщения заброневого объема корпуса с атмосферой, балластные цистерны, компрессор, гидролокатор, средства навигации и способной преодолевать водные преграды как в надводном, так и полностью погруженном положениях, автономной системой энергообеспечения на основе аккумуляторных батарей большой емкости для осуществления возможности работы и движения под водой без связи с атмосферой, датчиками глубины погружения, следящей системой регулирования глубины погружения и угловой стабилизации, обеспечивающей поддержание заданной глубины при нулевом запасе плавучести, и системой видеонаблюдения; причем всплытие и погружение осуществляются путем изменения наполнения балластных цистерн, суммарный объем которых определяется запасом плавучести и величиной расходуемого груза, минимальное количество балластных цистерн, объем и расположение каждой из них принимаются исходя из обеспечения непотопляемости при повреждении или неисправности любой цистерны и затопления ей противоположной с целью незначительного смещения центра тяжести; поддержание в заданных пределах глубины погружения, углов крена и дифферента осуществляется при использовании водоходных движителей с изменяемым вектором тяги; система сообщения заброневого объема корпуса с атмосферой выполняется в виде телескопической трубы регулируемой длины, у приемного отверстия которой располагается передающая камера системы видеонаблюдения.
Общий вид и основные компоновочные решения плавающей бронированной гусеничной машины в варианте средства боевого применения показаны на фиг.1, где приняты следующие обозначения:
1 - корпус;
2 - отсек аккумуляторных батарей;
3 - передающая камера системы видеонаблюдения;
4 - моторно-трансмиссионный отсек;
5 - ниша водоходного движителя;
6 - водоходный движитель;
7 - воздухопитающая труба;
8, 9 и 10 - соответственно носовая, бортовая и кормовая балластные цистерны.
Возможные режимы работы плавающей бронированной гусеничной машины, поясняющие сущность изобретения, показаны на фиг.2-4.
Плавающая бронированная гусеничная машина выполняется на шести- или семикатковой базе (фиг.1). Для осуществления требуемой степени защищенности в условиях ограничений по массе в конструкции несущего герметичного корпуса 1 широко используются легкие броневые сплавы. Водоизмещение корпуса обеспечивает поддержание машины на плаву в надводном положении. При семикатковой базе, ширине корпуса 3,0 м, принятой по условию вписываемости в железнодорожный габарит 02-ВМ (3150 мм), и высоте от днища до крыши около 1,7 м заброневой объем корпуса оценивается в 28-30 м3. При относительном запасе плавучести 10-12% ожидаемая величина боевой массы составляет 25-27 т, что с учетом значительной массы аккумуляторных батарей и специального оборудования подтверждает возможность обеспечения бронирования на уровне боевой машины пехоты и сохранения необходимой величины полезной нагрузки. Степень герметизации корпуса позволяет машине продолжительное время находиться на глубине около 10 м. С целью уменьшения гидродинамического сопротивления корпус имеет улучшенные носовые и кормовые обводы. Снижению сопротивления движению также способствует применение гидропневматической подвески с системой регулирования дорожного просвета и экранирование ходовой части.
Компоновочная схема машины характеризуется кормовым расположением моторно-трансмиссионного отсека 4 и носовым расположением отсека аккумуляторных батарей 2, что обеспечивает благоприятную развесовку. Перед моторно-трансмиссионным отсеком размещается телескопическая воздухопитающая труба 7 системы сообщения заброневого объема корпуса с атмосферой, у приемного отверстия которой находится передающая камера системы видеонаблюдения. Обитаемый отсек с отделением управления, боевым и десантным отделениями располагается в носовой и центральной частях машины. По периметру корпуса устанавливаются балластные цистерны: носовая 8, четыре бортовых 9 и кормовая 10. В кормовой части корпуса имеются ниши 5 для размещения откидных водоходных движителей 6. В транспортном положении водоходные движители не выступают за габариты машины.
Всплытие и погружение машины осуществляется путем изменения наполнения балластных цистерн, суммарный объем которых определяется запасом плавучести, количеством возимого топлива и массой расходуемого груза. Отсюда следует, что относительный запас плавучести машины при максимальной массе должен составлять 10-12%. Большее значение запаса плавучести приводит к недопустимому уменьшению полезного объема заброневого пространства вследствие увеличения объема балластных цистерн. При выработке топлива и расходе груза запас плавучести увеличивается. С точки зрения непотопляемости, относительно небольшая величина запаса плавучести компенсируется увеличенной производительностью водооткачивающих средств, имеющих электропривод от аккумуляторных батарей или генератора.
Минимальное количество балластных цистерн, объем и расположение каждой из них принимаются исходя из обеспечения непотопляемости при повреждении или неисправности любой цистерны и затопления ей противоположной с целью незначительного смещения центра тяжести машины. Например, повреждение носовой балластной цистерны 8 при нахождении машины в надводном положении приводит к значительному дифференту на нос, что может привести к потере продольной остойчивости. Устранение дифферента обеспечивается затоплением кормовой балластной цистерны 10, при этом сохраняется положительная плавучесть.
Источниками энергии для обеспечения движения и работы машины служат силовая установка на базе дизельного двигателя и аккумуляторные батареи. При удельной мощности 22-25 л.с./т, что является характерным значением для быстроходных гусеничных машин, мощность двигателя составляет 550-650 л.с. При работе на водоходные движители мощности дизельного двигателя достаточно для движения на плаву со скоростями порядка 12-14 км/ч.
Для сообщения двигателя с атмосферой при нахождении машины в полностью погруженном положении используется телескопическая воздухопитающая труба 7 регулируемой длины. В сложенном состоянии воздухопитающая труба размещается в шахте корпуса и не выступает за габариты машины.
С целью осуществления возможности работы в полностью погруженном положении при отсутствии сообщения заброневого объема корпуса с атмосферой применяется автономная система энергообеспечения на основе перспективных аккумуляторных батарей с высокими удельными характеристиками, например, литий-ионных или никель-металлгидридных. Масса аккумуляторных батарей при боевой массе 25-27 т, сохранении необходимой величины полезной нагрузки и требуемой степени защищенности оценивается в 2,0-2,5 т, что достаточно для движения в погруженном положении в течение часа со скоростями порядка 10-12 км/ч. Размещение отсека аккумуляторных батарей 2 у днища способствует снижению центра тяжести машины и, как следствие, повышению поперечной остойчивости.
Система автономного энергообеспечения может быть использована для привода ведущих колес гусеничного движителя с целью повышения тягово-динамических характеристик в особых режимах движения (разгон, ходоуменьшение и другие) или выходе из строя дизельного двигателя, то есть на машине возможно и целесообразно использование гибридной дизель-электрической силовой установки и электромеханической трансмиссии.
В качестве водоходных движителей 6 используются гребные винты в направляющих насадках или водометы. Водоходные движители выполняются с изменяемым вектором тяги. В зависимости от режима работы машины привод водоходных движителей может осуществляться от дизельного двигателя или аккумуляторных батарей. В приводе водоходных движителей применяются гидрообъемные передачи.
Поддержание в заданных пределах глубины погружения машины, углов крена и дифферента при близком к нулевому запасе плавучести обеспечивается с помощью следящей системы регулирования глубины погружения и угловой стабилизации при воздействии на приводы управления водоходных движителей с изменяемым вектором тяги. Положение машины (глубина погружения, углы крена и дифферента) определяется с помощью трех или четырех датчиков глубины погружения, устанавливаемых симметрично относительно продольной плоскости. Сигналы со всех датчиков поступают в блок управления системы, выполненный на основе пороговых устройств с зонами нечувствительности. Воздействие на приводы управления водоходных движителей осуществляется при изменении заглубления хотя бы одного из датчиков свыше пороговых значений, соответствующих заданной глубине погружения. Например, при достижении верхнего предела глубины погружения в результате движения с некоторым дифферентом на корму блок управления выдает команду на отклонение «вниз» одновременно двух водоходных движителей, благодаря чему происходит прекращение дальнейшего уменьшения глубины. При невозможности поддержания нужного положения машины воздействием на приводы управления водоходными движителями, например, при наличии небольшого положительного запаса плавучести, производится изменение наполнения балластных цистерн.
Для визуального ориентирования при движении на плаву используется система видеонаблюдения с передающей камерой 3, расположенной у приемного отверстия воздухопитающей трубы 7. Система видеонаблюдения также используется при ведении разведки на суше. Машина оснащается современными средствами навигации, а также специальным оборудованием для определения характеристик водных преград (глубина, профиль дна, наличие навигационных препятствий и другие), например гидролокатором, и средствами обеспечения обитаемости (регенератор воздуха, индивидуальные средства спасения).
Возможны следующие основные режимы работы плавающей бронированной гусеничной машины, показанные на фиг.2-4.
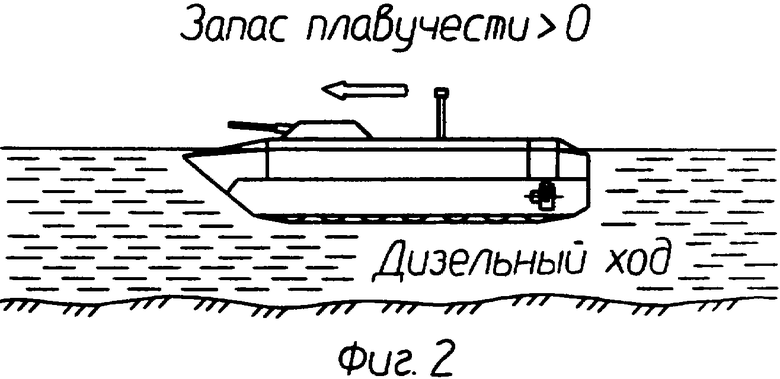
В обычных условиях машина преодолевает водные преграды в надводном положении (фиг.2) с относительным запасом плавучести 10-12%. При этом движение со скоростями порядка 12-14 км/ч осуществляется за счет работы дизельного двигателя, а для визуального ориентирования могут использоваться как система видеонаблюдения, так и обычные приборы наблюдения.
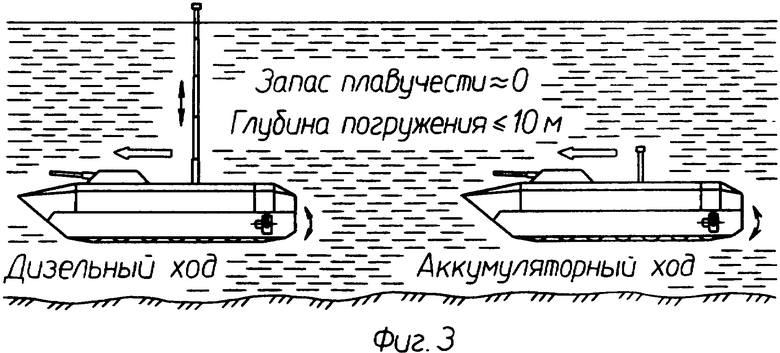
С целью снижения вероятности обнаружения и повышения защищенности машина способна преодолевать водные преграды в погруженном на глубину до 10 м положении (фиг.3). При этом водная среда выполняет роль дополнительной естественной защиты. Погружение осуществляется путем заполнения балластных цистерн забортной водой на величину запаса плавучести. Поддержание в заданных пределах глубины погружения машины, углов крена и дифферента обеспечивается с помощью следящей системы регулирования глубины погружения и угловой стабилизации при воздействии на приводы управления водоходных движителей с изменяемым вектором тяги. Сообщение дизельного двигателя с атмосферой производится с помощью воздухопитающей трубы регулируемой длины. Для визуального ориентирования используется система видеонаблюдения.
С целью обеспечения максимальной скрытности и защищенности плавающая бронированная гусеничная машина обладает способностью преодолевать водные преграды в полностью погруженном положении без сообщения заброневого объема корпуса с атмосферой (фиг.3), что осуществляется за счет применения автономной системы энергообеспечения на основе аккумуляторных батарей с высокими удельными характеристиками. Емкости аккумуляторных батарей достаточно для движения в течение часа со скоростями порядка 10-12 км/ч. Для ориентирования машины используются средства навигации, а безопасная работа экипажа обеспечивается с помощью регенератора воздуха.
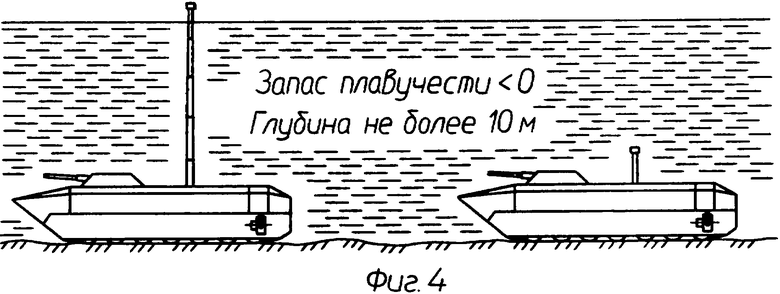
В результате заполнения балластных цистерн забортной водой на величину, превышающую запас плавучести, машина способна длительное время находиться на дне водной преграды глубиной до 10 м (фиг.4). При этом для энергообеспечения оборудования может использоваться дизельный двигатель или аккумуляторные батареи.
Таким образом, плавающая бронированная гусеничная машина характеризуется максимальной скрытностью и защищенностью, а также независимостью от глубины преодолеваемой водной преграды и свойств грунта дна.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ ПЛАВАЮЩАЯ МАШИНА | 2018 |
|
RU2714551C1 |
| Самоходная машина (варианты) | 2023 |
|
RU2841418C1 |
| БРОНИРОВАННАЯ МАШИНА | 2000 |
|
RU2170676C1 |
| МНОГОКАПСУЛЬНАЯ БРОНЕМАШИНА | 2014 |
|
RU2576070C2 |
| МАШИНА | 2008 |
|
RU2360205C1 |
| ПЛАВАЮЩАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2019 |
|
RU2708497C1 |
| ПЛАВАЮЩАЯ МАШИНА | 2000 |
|
RU2168419C1 |
| ПЛАВАЮЩАЯ ГУСЕНИЧНАЯ МАШИНА | 2002 |
|
RU2246682C2 |
| СПОСОБ УПРАВЛЕНИЯ ПЛАВАЮЩЕЙ МАШИНОЙ | 2007 |
|
RU2335413C1 |
| СПОСОБ ПОВЫШЕНИЯ ЖИВУЧЕСТИ ПЛАВАЮЩЕЙ МАШИНЫ | 2004 |
|
RU2270103C1 |
Изобретение относится к военной технике, в частности к области плавающих бронированных гусеничных машин. Машина, способная преодолевать водные преграды как в надводном, так и в полностью погруженном положениях, оборудована герметичным корпусом, водоходными движителями, системой сообщения заброневого объема корпуса с атмосферой, балластными цистернами, компрессором, гидролокатором, средствами навигации и системой видеонаблюдения. Машина также оснащается автономной системой энергообеспечения на основе аккумуляторных батарей большой емкости для осуществления возможности работы и движения в полностью погруженном положении без связи с атмосферой. Датчики глубины погружения и следящая система регулирования глубины погружения и угловой стабилизации обеспечивают поддержание заданной глубины при близком к нулевому запасе плавучести за счет использования водоходных движителей с изменяемым вектором тяги. Технический результат заключается в обеспечении максимальной скрытности и защищенности плавающей бронированной гусеничной машины при преодолении водных преград, а также независимости от глубины водной преграды и свойств грунта дна. 4 ил.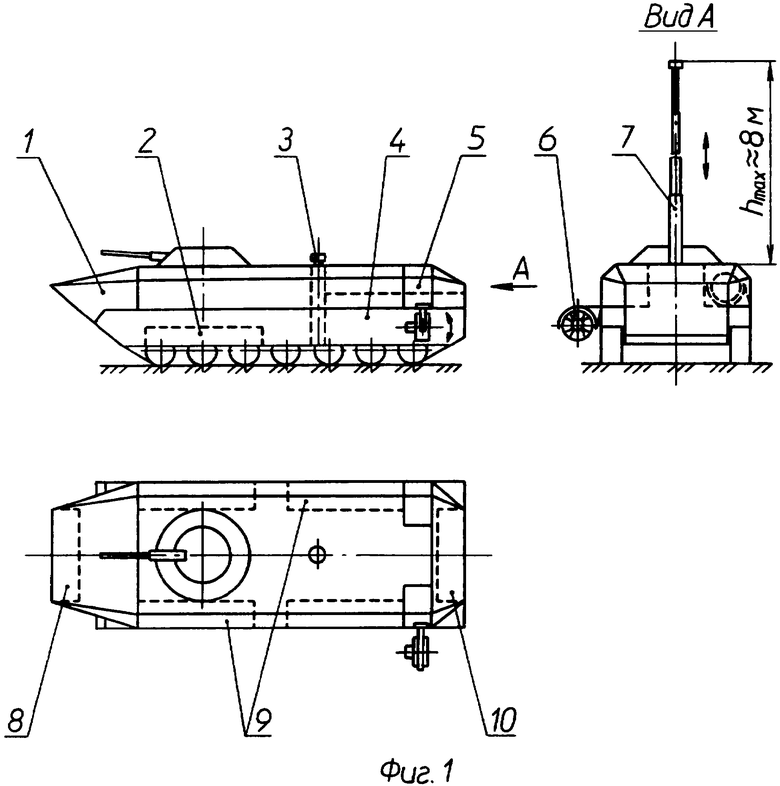
Плавающая бронированная гусеничная машина, способная преодолевать водные преграды как в надводном, так и в полностью погруженном положениях и оборудованная для этого герметичным корпусом, водоходными движителями, системой сообщения заброневого объема корпуса с атмосферой, балластными цистернами, компрессором, гидролокатором и средствами навигации, отличающаяся тем, что, с целью обеспечения максимальной скрытности и защищенности, а также независимости от глубины преодолеваемой водной преграды и свойств грунта дна, она оснащена автономной системой энергообеспечения для осуществления возможности работы и движения в полностью погруженном положении без связи с атмосферой, датчиками глубины погружения, следящей системой регулирования глубины погружения и угловой стабилизации, обеспечивающей поддержание заданной глубины при близком к нулевому запасе плавучести, и системой видеонаблюдения; причем автономная система энергообеспечения выполняется на основе аккумуляторных батарей большой емкости; всплытие и погружение осуществляются путем изменения наполнения балластных цистерн, суммарный объем которых определяется запасом плавучести и величиной расходуемого груза, при этом минимальное количество балластных цистерн, объем и расположение каждой из них принимаются исходя из обеспечения непотопляемости при повреждении или неисправности любой цистерны и затопления ей противоположной с целью незначительного смещения центра тяжести; поддержание в заданных пределах глубины погружения, углов крена и дифферента осуществляется при использовании водоходных движителей с изменяемым вектором тяги; система сообщения заброневого объема корпуса с атмосферой выполняется в виде телескопической трубы регулируемой длины, у приемного отверстия которой располагается передающая камера системы видеонаблюдения.
| БРОНИРОВАННАЯ МАШИНА | 2000 |
|
RU2170676C1 |
| Стеблеизмельчитель | 1988 |
|
SU1593958A1 |
| Устройство для крепления роторных обмоток турбогенераторов | 1957 |
|
SU111506A1 |
| Агрегат для изготовления паркетных досок | 1955 |
|
SU113547A1 |
| 0 |
|
SU155540A1 | |
| Тепловая труба | 1980 |
|
SU937959A1 |

