Изобретение относится к транспортным средствам, а именно к транспортным платформам разнообразных грузовых, пассажирских, промышленных, военных и сельскохозяйственных машин, приспособленных для самостоятельного передвижения по земле (суше) и по воде.
Известна транспортная платформа плавающей бронированной гусеничной машины, содержащая многокапсульный герметичный корпус, силовую установку с ДВС, гусеничный движитель с подвеской и приводом от ДВС и водоходный движитель с рулем управления. Для привода водоходного движителя используется электродвигатель и аккумуляторная батарея, устанавливаемые на машину перед форсированием водной преграды (RU 2576070 С2, F41H 7/00, 27.02.2016).
Недостатком этой платформы и машины на ее базе является отсутствие автономности работы, обусловленное применением съемной аккумуляторной батареи и съемного приводного электродвигателя.
Известна также транспортная платформа плавающей гусеничной машины, содержащая корпус, силовую установку, водоходный движитель, выполненный в виде одного гребного винта, установленного в кормовой части машины. Механический привод этого винта осуществляется от гусеничного движителя через редуктор гребного винта с полуосью в герметичном кожухе, соединяющим колеса отбора мощности и редуктор передачи горизонтального вращения от колес отбора мощности на вал редуктора гребного винта (RU 162707 U1, F41H 7/00, 27.06.2016).
Недостатками этой платформы и машины на ее базе является пониженная надежность, обусловленная повышенной сложностью конструкции механического привода гребного винта, а также пониженная маневренность при движении на воде по причине применения одного гребного винта.
Известна также плавающая транспортная платформа амфибии, имеющая корпус, в котором размещены два дизельных двигателя внутреннего сгорания (ДВС), приводящие это транспортное средство в движение на воде с помощью двух водометов, каждый из которых механически соединен с соответствующим ДВС. Для движения на суше используется гусеничный движитель с приводом каждой гусеницы от отдельных электродвигателей. Их питание осуществляется от электрического генератора, соединенного с одним из ДВС. Система управления осуществляет независимое регулирование каждого электродвигателя, обеспечивая движение амфибии по суше и ее торможение (US 9022822 В2, B60F 3/00, В63Н 11/00 и др., 05.05.2015).
Недостатком этой транспортной платформы является повышенная сложность конструкции, обусловленная наличием двух ДВС. Другим ее недостатком является пониженная тяговая мощность при движении на суше, поскольку энергия на гусеничный движитель передается только от одного ДВС.
Наиболее близкой к предложенной является плавающая транспортная платформа бронированной гусеничной машины, обеспечивающая возможность преодоления водных преград в надводном и в полностью погруженном положениях. Она содержит герметичный корпус, источник энергии, выполненный в виде дизель-электрической силовой установки и аккумуляторных батарей, электромеханическую трансмиссию, два откидных водоходных движителя с изменяемым вектором тяги (два водомета или два гребных винта в направляющих насадках), балластные цистерны, компрессор и систему управления. Для привода водоходных движителей используются гидрообъемные передачи, энергия на которые поступает от ДВС или от аккумуляторных батарей (RU 2326769 С2, B60F 3/00, 20.06.2008).
Недостатком этой платформы является повышенная сложность и пониженная надежность, а также пониженная скорость движения на воде. Это обусловлено тем, что при движении на воде с использованием энергии аккумуляторных батарей (АКБ) одновременно используются последовательно соединенные гидрообъемные и электромеханические передачи водоходных движителей, что приводит к усложнению конструкции платформы с соответствующим снижением ее надежности. Тройное преобразование энергии в этих приводах («электрическая энергия АКБ» → «выходная механическая энергия электромеханических приводов (входная механическая энергия гидрообъемных передач)» -* «гидравлическая энергия гидрообъемных передач» → «выходная механическая энергия гидрообъемных передач, передаваемая на водометы или гребные винты») приводит к повышенным потерям энергии в приводах водоходных движителей, уменьшению передаваемой на них механической мощности и к соответствующему снижению скорости движения платформы (машины) на воде.
Из анализа аналогов и прототипа следует, что в предшествующем уровне техники не решена техническая проблема создания плавающей транспортной платформы, обладающей простотой конструкции, высокой надежностью и высокой скоростью движения на воде. Задачей изобретения является создание такой платформы.
Техническим результатом, обеспечиваемым изобретением, является упрощение конструкции с соответствующим повышением надежности плавающей транспортной платформы, а также повышение скорости ее движения на воде.
В плавающей транспортной платформе, приспособленной для установки на нее функционального оборудования и содержащей водонепроницаемый корпус, бортовой источник электрической энергии, водоходный движитель, выполненный в виде по меньшей мере одного водомета или импеллера, привод водоходного движителя, сухопутный движитель, электромеханический привод сухопутного движителя, выполненный с возможностью управляемой передачи энергии от бортового источника электрической энергии к этому движителю, указанный технический результат достигается за счет того, что привод водоходного движителя выполнен электромеханическим и приспособлен для передачи энергии от бортового источника электрической энергии по меньшей мере к одному водомету или импеллеру водоходного движителя.
В частных случаях реализации транспортной платформы этот технический результат достигается также за счет того, что:
- привод водоходного движителя выполнен в виде по меньшей мере одного электродвигателя кольцевого типа, имеющего внешний статор и полый ротор, внутри которого установлено по меньшей мере одно рабочее колесо (винт, шнек и т.п.);
- привод водоходного движителя выполнен в виде контрроторного электродвигателя, имеющего статор и два полуротора, механически соединенных с соосными рабочими колесами, вращающимися в противоположных направлениях (контрвинтами, контршнеками и т.п.), в частности, в виде асинхронного секционированного контрроторного электродвигателя, имеющего два внутренних кольцевых полых полуротора, внутри каждого из которых установлено рабочее колесо, и секционированный статор, выполненный с различным чередованием фаз, обеспечивающим противовращение полуроторов;
- по меньшей мере одно рабочее колесо (винт, шнек и т.п.) прикреплено к ротору или полуротору и выполнено без центральной ступицы и без центрального вала;
- бортовой источник электрической энергии выполнен в виде аккумуляторной батареи и/или двигателя внутреннего сгорания (ДВС) и соединенного с ним генератора, а электромеханический привод сухопутного движителя содержит по меньшей мере один тяговый электродвигатель, соединенный с сухопутным движителем через механическую передачу, и по меньшей мере один контроллер тягового электродвигателя, включенный между выходом генератора и/или аккумуляторной батареи и обмотками тягового электродвигателя;
- привод водоходного движителя содержит по меньшей мере один электродвигатель и по меньшей мере один контроллер этого привода, включенный между выходом генератора и/или аккумуляторной батареи и обмотками по меньшей мере одного электродвигателя указанного привода;
- бортовой источник электрической энергии содержит многофазный генератор переменного тока, причем по меньшей мере один контроллер электродвигателя привода водоходного движителя выполнен с возможностью переключения порядка чередования фаз переменного тока, поступающего по меньшей мере на один электродвигатель привода водоходного движителя;
- по меньшей мере один контроллер электродвигателя привода водоходного движителя содержит силовой транзисторный преобразователь и микроконтроллер, приспособленный для управления этим преобразователем;
- плавающая транспортная платформа оснащена системой управления функциональным оборудованием и приводами сухопутного и водоходного движителей, выполненной с возможностью реализации функций их защиты от аварийных режимов работы.
Указанные альтернативные отличительные признаки независимого и зависимых пунктов формулы изобретения находятся в прямой причинно-следственной связи с достигаемым техническим результатом, поскольку их реализация обеспечивает упрощение конструкции и повышение надежности плавающей транспортной платформы, а также повышение скорости ее движения на воде.
Реализация отличительного признака независимого пункта формулы, характеризующегося одновременным применением на платформе независимых электромеханических приводов сухопутного и водоходного движителей, обеспечивает значительное упрощение конструкции платформы за счет исключения в этих приводах как гидроприводов, так и сложных механических передач. Такое упрощение конструкции, а также исключение рабочей жидкости, обеспечивает существенное повышение надежности платформы.
Одновременно, благодаря высокому КПД электромеханических приводов и возможности достижения оптимальных скоростных и нагрузочных режимов их работы при управлении этими приводами, обеспечивается существенное повышение тяговой мощности и скорости движения платформы на воде.
Реализация признака зависимого пункта формулы изобретения, характеризующегося реализацией привода водоходного движителя на основе электродвигателей кольцевого типа, имеющих внешние статоры и полые роторы, внутри которых установлены рабочие колеса (винты, шнеки), позволяет исключить механическую передачу между электродвигателями и винтами, что обеспечивает упрощение конструкции и соответствующее повышение надежности платформы. Исключение механической передачи обеспечивает также повышение КПД привода, что приводит к повышению тяговой мощности водоходного движителя и скорости движения платформы на воде.
К этому же техническому результату приводит реализация следующего отличительного признака зависимого пункта формулы, согласно которому привод водоходного движителя выполнен в виде контрроторного электродвигателя, имеющего статор и два полуротора, механически соединенных с соосными контрвинтами. Это техническое решение обеспечивает повышение пропульсивного коэффициента и более эффективное использование мощности, потребляемой водоходным движителем, за счет существенного уменьшения закручивания струй рабочих потоков. Применение встречного вращения рабочих колес позволяет значительно упростить и повысить надежность платформы за счет исключением направляющих и спрямляющих аппаратов. Контрвращение рабочих колес (винтов, шнеков) по сравнению с одиночными колесами позволяет получить большее дисковое отношение при умеренной ширине каждой лопасти, а также отдалить кавитацию. Повышения эффективного числа Рейнольдса и реализация соответствующей возможности осуществлять более глубокое регулирования частоты вращения рабочих колес обеспечивает увеличение скорости движения платформы на воде. Кроме того, контрвращение рабочих колес позволяет устранить некомпенсированные реактивные моменты и значительно повысить КПД водоходного движителя, что также приводит к повышению скорости движения платформы на воде.
Реализация следующего отличительного признака, характеризующегося креплением каждого рабочего колеса (винта, шнека) непосредственно к ротору или полуротору, позволяет исключить центральную ступицу и центральный вал, что обеспечивает упрощение конструкции и соответствующее повышение надежности платформы. Применение рабочего колеса без вала позволяет исключить наматывание водорослей на этот вал, что также приводит к повышению надежности. Одновременно, благодаря исключению центральной ступицы и центрального вала, обеспечивается увеличение площади водовода водомета или импеллера, что приводит к увеличению тягового усилия водоходного движителя и скорости движения платформы на воде.
В случае реализации следующего отличительного признака, характеризующегося применением асинхронных секционированных контрроторных электродвигателей, имеющих два внутренних кольцевых полых полуротора и секционированный статор, выполненный с различным чередованием фаз, упрощение конструкции и повышения надежности достигается за счет упрощения контроллеров водоходных движителей, которые в этом случае реализуются в виде переключателя порядка чередования фаз. Одновременно указанный технический результат достигается за счет простоты конструкции и надежности асинхронных двигателей. Упрощение конструкции контроллеров водоходных движителей, а именно - их выполнение в виде дискретных переключателей, в том числе электроконтактных, позволяет существенно снизить потери в этих контроллерах, что приводит к увеличению мощности, передаваемой на электродвигатели водоходных движителей и к увеличению скорости движения платформы. Установка двух полуроторов на общем валу уменьшает размеры пазов и короткозамыкающих колец асинхронных электродвигателей, что позволяет увеличить внутренний диаметр полых роторов (полуроторов) с соответствующее сечение водовода. Это также обеспечивает возможность повышения эффективности работы водоходного движителя и увеличение скорости движения платформы на воде.
К этому же техническому результату приводит реализация признака, характеризующегося применением простого по конструкции и надежного генератора переменного тока. Непосредственное подключение его выходного напряжения к обмоткам асинхронных электродвигателей приводит, как указано выше, к уменьшению потерь в приводах водоходного движителя и к повышению скорости движения платформы на воде.
Благодаря реализации следующего отличительного признака, согласно которому бортовой источник электрической энергии выполнен в виде аккумуляторной батареи и/или ДВС и соединенного с ним генератора, а электромеханический привод сухопутного движителя содержит один или несколько тяговых электродвигателей, соединенных с сухопутным движителем через механические передачи, и контроллеры (контроллер) тяговых электродвигателей, включенные между выходом генератора и/или аккумуляторной батареи и обмотками тяговых электродвигателей, упрощение конструкции и повышение надежности платформы достигается за счет исключения механических передач. Одновременно, благодаря высокому КПД и возможности регулирования этого привода из условия достижения оптимального режима работы автономного источника энергии (ДВС), обеспечивается повышение выходной тяговой мощности сухопутного движителя. Это приводит к повышению скорости движения платформы на воде в тех случаях, когда при неработающем водоходном движителе или в дополнение к нему тяговое усилие платформы при движении на воде реализуется за счет перематывания гусениц или вращения колес.
Реализация контроллеров электродвигателей водоходного движителя на основе силовых транзисторных преобразователей и микроконтроллеров обеспечивает достижение указанного технического результата за счет гибкости и плавности регулирования водометов или импеллеров, а повышение надежности - за счет реализации защиты их рабочих колес (винтов, шнеков), в частности, в случае попадания в водометы или импеллеры камней или иных посторонних предметов.
При реализации последнего отличительного признака зависимого пункта формулы изобретения, согласно которому плавающая транспортная платформа оснащена системой управления функциональным оборудованием и приводами сухопутного и водоходного движителей, обеспечивается плавное независимое управление не только сухопутным движителем и функциональным оборудованием, но и каждым водометом или импеллером из условия передачи максимально возможной мощности бортового источника энергии на водоходный движитель, регулирование вектора его тяги, в том числе его реверсирование, а также защита от повреждений. В этом случае те функции водоходного движителя, которые в известных водоходных движителях решаются с помощью механических устройств, реализуются электронной системой управления. Одновременно повышается точность и оперативность формирования сигналов управления водоходным движителем, силовой передачей сухопутного движителя, ДВС и функциональным оборудованием машины. Это также обеспечивает повышение надежности плавающей транспортной платформы и повышение скорости ее движения на воде.
Реализация одного (любого) из указанных отличительных признаков изобретения не препятствует реализации любого другого альтернативного отличительного признака. Например, электромеханический привод водоходного движителя может быть реализован как с контрроторными, так и с однороторными электродвигателями. Винты могут быть установлены как внутри роторов или полуроторов, так и вне электродвигателей, не имеющих полостей или отверстий в валах их роторов. Поэтому в конструкции транспортной платформы может быть реализован как один из указанных альтернативных отличительных признаков независимого и зависимых пунктов формулы изобретения, так и одновременно несколько отличительных признаков в их любом сочетании, причем от количества реализованных отличительных признаков зависит уровень достижения указанного технического результата.
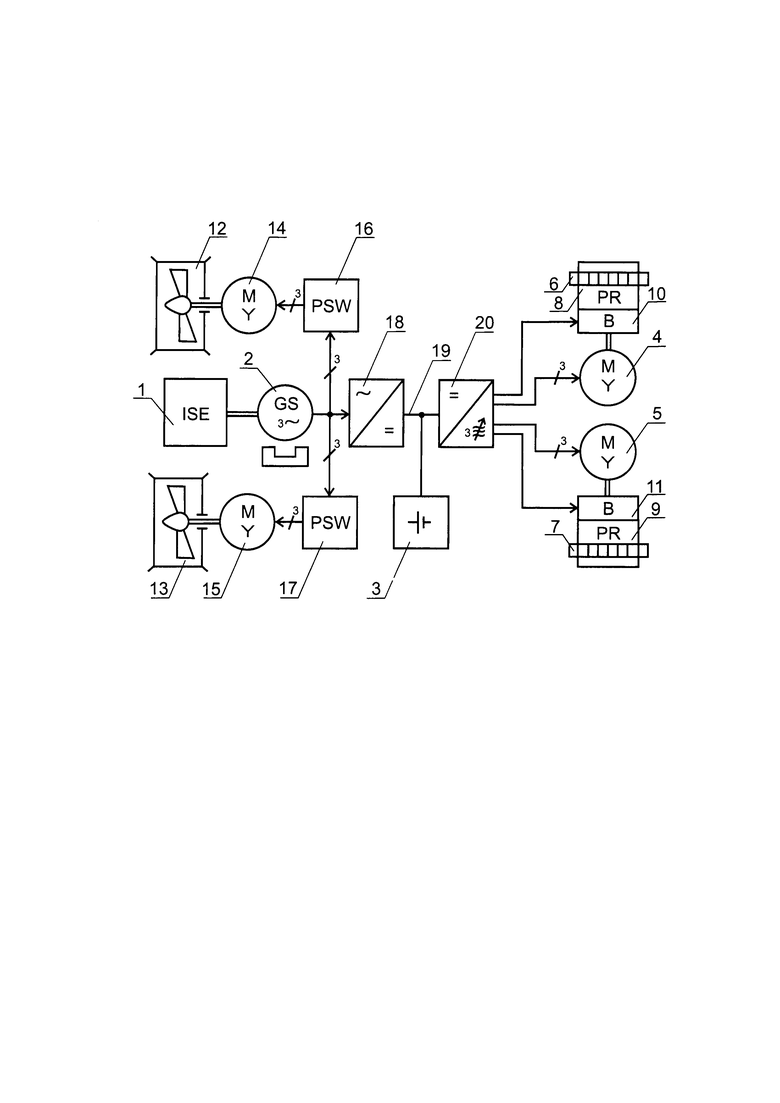
Техническая сущность и принцип действия предложенного устройства поясняются чертежом, на котором в качестве примера осуществления заявляемого изобретения показана упрощенная схема плавающей транспортной платформы.
Платформа содержит водонепроницаемый несущий корпус, водоизмещение которого обеспечивает ее поддержание на плаву в надводном положении. Корпус служит для размещения и защиты экипажа, а также агрегатов, механизмов и систем транспортной платформы и функционального оборудования машины, реализуемой на ее базе. Для достижения требуемой степени защищенности в условиях ограничений по массе корпус платформы может быть выполнен из легких броневых сплавов.
Бортовой источник электрической энергии выполнен выполнен в виде двигателя внутреннего сгорания (ДВС) 1 (с обслуживающими системами питания топливом и воздухом, смазки, охлаждения, подогрева и запуска) и соединенного с ним генератора 2, или аккумуляторной батареи (АКБ) 3, или одновременно ДВС с генератором и АКБ.
На машине может быть установлен генератор любого типа - асинхронный, вентильный с постоянными магнитами на роторе (показано на чертеже), вентильно-индукторный и т.д. Он может иметь как жидкостное, так и воздушное охлаждение.
ДВС соединен с генератором 2 непосредственно или через мультипликатор, упругую муфту, карданный вал и т.п.
В качестве сухопутного движителя, с соответствующей системой подрессоривания (подвеской), может использоваться гусеничный, колесный, колесно-гусеничный, лыжно-гусеничный, аэросанный движитель, или любая комбинация этих движителей.
В приведенном примере используется последовательная кинематическая схема моторно-трансмиссионной установки машины, которая исключает механическую связь ДВС с сухопутным движителем. В этом случае электромеханический привод (силовая передача) сухопутного движителя содержит тяговые электродвигатели 4, 5, соединенные с ведущими звездочками гусениц 6, 7 или колес непосредственно или через механические передачи, в частности, через бортовые планетарные редукторы 8, 9. В случае необходимости, тяговые электродвигатели могут быть соединены с бортовыми редукторами через дополнительные передаточные устройства - муфты, карданные валы, дополнительные понижающие редукторы и т.д.
С валами тяговых электродвигателей (с входными валами бортовых редукторов) могут быть соединены стояночные или рабочие тормоза 10, 11.
Тяговые электродвигатели могут быть встроены в ступицы ведущих колес или размещены внутри обвода гусениц, либо размещены в корпусе транспортной платформы. Они могут иметь любую конструкцию. Предпочтительно применение реактивных индукторных электродвигателей.
Возможна реализация платформы с одним тяговым электродвигателем. В этом случае силовая передача, с помощью которой осуществляется передача механической энергии от тягового электродвигателя на ведущие колеса или ведущие звездочки гусениц, содержит главную передачу с бортовыми фрикционами и тормозами 10, 11, либо с дифференциальным механизмом, обеспечивающим возможность поворота платформы при ее движении на суше.
Возможна также реализация силовой передачи (передач), имеющей более двух тяговых электродвигателей, использующихся для привода всех 4-х или более ведущих колес или гусениц платформы.
Гусеничный или колесный сухопутный движитель предназначен прежде всего для передвижения платформы на суше. Движение на плаву может обеспечиваться за счет перематывания гусениц или вращения ведущих колес. При этом гусеничный движитель, использующийся в качестве водоходного, может иметь гидродинамические кожуха, закрывающие верхние ветви гусениц, лопатки или развитые грунтозацепы.
Для повышения скорости движения платформы на воде она оснащена водоходным движителем - одним, двумя или более водометами или импеллерами 12, 13, создающими тяговое усилие для движения на воде. Они установлены преимущественно в кормовой части платформы и имеют привод от электродвигателей 14, 15 водоходного движителя.
Водомет представляет собой водяной насос, работающий под водой. Он содержит из водозаборную трубу, рабочее колесо, именуемое также лопастным механизмом, с его приводом и водовод (водометную трубу). Водомет может также содержать выходную трубу со спрямляющим аппаратом и рулевое или реверсивно-рулевое устройство (РРУ). В водоводе водяной поток ускоряется лопастным механизмом (рабочим колесом), что обеспечивает направленный выброс струи через выпускное отверстие в корме транспортной платформы. При этом под рабочим колесом, именуемым также лопастным механизмом, винтом или гребным винтом, подразумевается крыльчатка насоса, шнековое колесо с винтовыми лопатками и т.п.
Водоходный движитель может быть реализован также на основе импеллеров, именуемых также винтами или рабочими колесами (лопаточными механизмами), заключенными в открытые полые цилиндры. Традиционная конструкция импеллера - это винт с кольцевым крылом или кольцевой насадкой.
Каждый водомет или импеллер водоходного движителя может иметь одно рабочее колесо (винт, шнек и т.п.), либо два рабочих колеса, вращающихся в одну (тандемвращение) или в разные стороны (контрвращение).
Водоходный движитель может быть реализован с изменяемым вектором тяги, что обеспечивается поворотом водометов или импеллеров в горизонтальной или вертикальной плоскости, в частности, с помощью электромеханического привода, либо изменением направления выбрасываемых ими струй воды с помощью рулевого или реверсивно-рулевого устройства, имеющего соответствующий привод, например электромеханический.
При движении платформы на суше заборные отверстия водоходного движителя могут закрываться крышками.
Электродвигатели привода водоходного движителя могут быть кольцевого типа. В этом случае они содержат внешний статор и полый ротор, внутри которого установлено рабочее колесо (лопастной механизм) - винт, шнек и т.п. водомета или импеллера.
Предпочтительно применение контрроторного электродвигателя, имеющего статор и два полуротора, механически соединенных с соосными рабочими колесами, в частности, контрвинтами, вращающимися в противоположные стороны.
Контрроторный электродвигатель может быть асинхронным секционированным, имеющим два внутренних полуротора и секционированный статор, выполненный с различным чередованием фаз, обеспечивающим противовращение полуроторов.
Если полуроторы размещены на подшипниках внутри статора и выполнены кольцевыми полыми, то внутри каждого полуротора установлено рабочее колесо (винт, шнек).
Винт или шнек, прикрепленный к ротору или полуротору, особенно расположенный внутри него, может быть выполнен без центральной ступицы и без центрального вала.
Управление электродвигателями водоходного движителя 14, 15 осуществляется с помощью одного или нескольких контроллеров водоходного движителя 16, 17. Если на платформе установлены асинхронные электродвигатели, в том числе контрроторные, то, в случае применения многофазного, например трехфазного, генератора переменного тока 2, возможно существенное упрощение контроллеров в 16, 17. В этом случае они реализуют подключение электродвигателей 14, 15 к генератору 2 и отключение от него, а также изменение (переключение) порядка чередования фаз напряжений, поступающих на эти электродвигатели с целью обеспечения реверса водометов или импеллеров. Такие контроллеры могут быть реализованы на основе релейно-контактных или симисторных схем.
Если электродвигатели водоходного движителя 14, 15 выполнены синхронными вентильно-индукторными или с постоянными магнитами на роторе, то контроллеры водоходного движителя 16, 17 содержат силовые транзисторные преобразователи и микроконтроллеры, обеспечивающими управление этими преобразователями.
Для электрического питания таких контроллеров необходимо постоянное напряжение, которое формируется путем двухполупериодного выпрямления выходного напряжения генератора 2 с помощью управляемого или неуправляемого выпрямителя 18. К его выходу (к силовой шине постоянного тока 19) может быть подключена аккумуляторная батарея 3. В этом случае шины питания контроллеров водоходного движителя 16, 17 подключены не к генератору, а к АКБ 3 и/или к выходу выпрямителя 18 (на чертеже условно не показано).
Такое техническое решение является более сложным, но обеспечивает возможность движения платформы на воде при неработающем ДВС за счет энергии, запасенной в АКБ. Кроме того, в случае установки вместо выпрямителя 18 контроллера генератора (инвертора, преобразователя и т.п.), обеспечивающего коммутацию его обмоток, генератор 2 может работать в режиме электродвигателя при запуске ДВС 1 и при торможении платформы двигателем.
Силовой выпрямитель 18 или контроллер генератора 2, а также регулятор выходного напряжения генератора (при его наличии), могут быть отнесены к составным частям этого генератора 2 и размещены в одном корпусе с ним.
Энергия от бортового источника электрической энергии (от генератора 2 через выпрямитель (контроллер генератора) 18 и/или от АКБ поступает по меньшей мере на один контроллер тяговых электродвигателей 20, который может именоваться также контроллером силовой передачи, инвертором, силовым блоком управления и т.п. Он предназначен для преобразования постоянного напряжения бортового источника энергии (напряжения на силовых шинах 19) в переменное напряжение или в однополярные импульсы, поступающие на фазные обмотки тяговых электродвигателей 4, 5, а также для формирования сигналов управления тормозами 10, 11.
Силовые электронные ключи, входящие в его состав, выполнены преимущественно на биполярных транзисторах с изолированным затвором (БТИЗ, IGBT) или в виде модулей, реализованных на основе этих транзисторов, и имеют гальванически развязанные драйверы этих транзисторов (модулей). Для двух тяговых электродвигателей 4, 5 может использоваться один двухканальный контроллер (инвертор, преобразователь, коммутатор) тяговых электродвигателей 20 (показано на чертеже). Для работы с каждым тяговым электродвигателем может устанавливаться отдельный контроллер. Возможна также установка нескольких контроллеров для работы с одним тяговым электродвигателем, например, при дроблении мощности по секциям его статора.
К силовой шине 19 может быть подключен емкостный или инерциальный накопитель энергии, реализованный, соответственно, на основе конденсаторов или вращающегося маховика, а также тормозной резистор с соответствующим устройством управления, обеспечивающий поглощение электрической энергии при динамическом торможении платформы тяговыми электродвигателями 4, 5 во время ее движения на затяжном спуске.
Плавающая транспортная платформа может быть также оснащена водооткачивающим средством (устройством) и водоотражательный (волноотражательный) щитком с приводами любого вида, например линейными электромеханическими актуаторами, использующими энергию бортового источника, поступающую с силовых шин 19.
Эта платформа, в зависимости от ее грузоподъемности (водоизмещения корпуса), габаритных размеров (базы, колеи), положения центра тяжести и типа движителей, может быть приспособлена для установки самого разнообразного функционального оборудования. Это оборудование может быть выполнено, в частности, в виде грузовой или пассажирской платформы, грузоподъемного механизма, землеройного или бурового оборудования, комплекса вооружения, установки разминирования, оборудования для тушения пожаров и т.п., либо комбинации этого оборудования.
Привод функционального оборудования может быть любого типа - механическим, электромеханическим, гидравлическим, электрогидравлическим, пневматическим, электропневматическим и т.д., получающим энергию от ДВС 1, генератора 2 или от силовых шин 19.
Система управления функциональным оборудованием и приводами сухопутного и водоходного движителей платформы может именоваться также системой контроля, защиты и управления, системой электрооборудования и т.д. Платформа может иметь систему как ручного управления (управление оператором с рабочего места, размещенного внутри платформы), так и автоматизированного и/или дистанционного управления.
В общем случае она включает в себя высоковольтную и низковольтную части этой системы. Ее информационную основу может составлять цифровой вычислитель, который может именоваться также контроллером верхнего уровня, блоком управления, бортовой ЭВМ, информационно-управляющим блоком и т.п. (на чертеже условно не показан).
В состав системы управления может входить автоматизированное рабочее место (АРМ) оператора или двух операторов (командира, механика-водителя, наводчика и т.п.), а также бортовые датчики и средство связи платформы со стационарным постом управления по радиоканалу, проводной линии связи или по оптоволоконному кабелю.
В состав АРМ входят органы управления движением платформы (джойстики или штурвал для ее поворота на суше и на плаву), органы управления ДВС, функциональным оборудованием, водооткачивающим средством, водоотражательным щитком, световыми приборами и т.д., а также дисплей и/или набор световых индикаторов для отображения режимов работы платформы, а также диагностических и аварийных сигналов.
Электронные блоки платформы, включая контроллеры водоходного движителя 14, 15, генератора (выпрямителя) 18, силовой передачи 20, ДВС, функционального оборудования и АРМ, могут быть выполнены в общем корпусе в виде единого контроллера (электронного блока, управляющего блока, шкафа управления и т.п.), либо в разных корпусах. Каждый из них в общем случае содержит информационную часть, реализованную на основе микроконтроллера или цифрового сигнального процессора, интерфейсные схемы, обеспечивающие согласование входных/выходных цепей микроконтроллеров с линиями связи и, в случае необходимости, с бортовыми датчиками, а также силовую часть, реализованную на силовых транзисторах и/или транзисторных модулях и обеспечивающую формирование и передачу сигналов необходимой мощности на обмотки электродвигателей 4, 5, 14, 15, генератора 2 (в случае необходимости), световые и сигнальные приборы и исполнительные механизмы ДВС, функционального оборудования, водооткачивающего средства, волноотражательного щитка и т.п.
С целью реализации функций защиты составных частей платформы, включая водоходный движитель, от повреждений и аварийных режимов, в энергонезависимой памяти контроллеров предварительно записаны параметры предельных режимов их работы, а контроллеры выполнены с возможностью сравнения рабочих параметров этих составных частей, контролируемых бортовыми датчиками, с их предельными параметрами, и последующего формирования соответствующих сигналов защиты в зависимости от результатов этого сравнения.
Контроллеры могут именоваться также блоками управления, управляющими устройствами, блоками входов и нагрузок, информационно-управляющими блоками или устройствами и т.д. Они обладают ресурсами (вычислительной мощностью, объемом памяти программ и данных, аналого-цифровыми преобразователями и т.д.), достаточными для обработки выходных сигналов бортовых датчиков и управляющих воздействий оператора, а также реализации алгоритмов автоматизированного и/или дистанционного управления движением платформы и работы ее функционального оборудования.
В состав бортовых датчиков могут входить датчики продольного и поперечного крена платформы, акселерометры и гироскопы бесплатформенной системы инерциальной навигации, приемник глобальной спутниковой навигации, а также датчики рабочих параметров силовой передачи, бортового источника энергии (включая ДВС), функционального оборудования, водоходного движителя и водооткачивающего средства.
Линии передачи информационных сигналов между устройствами и электронными блоками платформы могут быть выполнены с использованием стандарта промышленной сети CAN (Controller Area Network - сеть контроллеров). Возможно применение интерфейсов LIN (Local Interconnection Network), беспроводных интерфейсов типа ZigBee (стандарт IEEE 802.15.4) и т.п. Возможно также соединение отдельных функциональных узлов системы управления между собой с помощью отдельных проводов.
Работа предлагаемой транспортной платформы осуществляется следующим образом.
В положении «на плаву» платформа в горизонтальном положении частично или полностью погружена в воду и внутренний объем ее корпуса сообщается с атмосферой посредством воздухопитающей трубы, через которую подается воздух для дыхания членов экипажа (в режиме ручного управления), а также для обеспечения работы ДВС (при его наличии) и компрессора, подающего воздух в надувные поплавки (при их наличии).
Первичным источником энергии для движения платформы и для работы ее функционального оборудования является бортовой источник энергии.
Запуск ДВС (при его наличии) осуществляется либо дистанционно с использованием средства связи, либо оператором (механиком-водителем) с помощью ключа запуска ДВС, размещенного на АРМ.
Цифровой вычислитель (контроллер верхнего уровня), вьполняющий функции ведущего устройства системы управления платформы, работает по программе, предварительно записанной в его энергонезависимую память и координирует работу всех составных частей платформы, осуществляя информационное взаимодействие с ними по шине CAN.
В начале движения машины оператор с помощью АРМ или дистанционно задает ее скорость, направление движения, маршрут (траекторию движения) или его конечную точку. Далее цифровой вычислитель (контроллер верхнего уровня) после обработки сигналов управления и бортовых датчиков формирует и передает по шине CAN на функциональные устройства системы управления сигналы управления движением платформы и работы ее функционального оборудования.
Одновременно цифровой вычислитель (контроллер верхнего уровня) с помощью бортовых датчиков осуществляет контроль рабочих режимов узлов и агрегатов и платформы, в том числе водоходного и сухопутного движителей и их приводов, обеспечивая их защиту от аварийных режимов путем передачи аварийных сигналов отключения приводов на соответствующие контроллеры и формирования предупреждающих информационных сигналов, поступающих на АРМ по шине CAN и на внешний пост дистанционного управления через средство связи.
Управления движением машины на суше осуществляется путем изменения скоростей вращения выходных валов тяговых электродвигателей 4, 5 с помощью контроллеров (контроллера) тяговых электродвигателей (контроллера силовой передачи) 20, а также управления тормозами 10, 11.
Перед началом движения платформы на воде оператор в режиме дистанционного управления, либо механик-водитель, воздействуя на соответствующий орган управления, поднимает водоотражательный щиток.
Для передвижения машины на плаву может использоваться поступательное движение гусениц или вращение ведущих колес. Нижними ветвями гусениц или нижними частями ведущих колес создается поток воды, направленный в сторону, противоположную движению.
Поворот на воде осуществляется за счет разницы в скоростях перематывания гусениц или вращения ведущих колес левого и правого борта машины.
Для повышения скорости и подвижности машины на воде оператор с помощью АРМ или в режиме дистанционного управления формирует сигналы управления (включения и задания скорости) водометами или импеллерами 12, 13 водоходного движителя. Эти сигналы непосредственно или через цифровой вычислитель (контроллер верхнего уровня) по шине CAN поступают на контроллеры водоходного движителя 16, 17, которые обеспечивают передачу энергии от бортового источника энергии на электродвигатели водоходного движителя 14, 15.
При этом если электродвигатели водоходного движителя 14, 15 выполнены асинхронными, то контроллеры водоходного движителя 16, 17 осуществляют подключение обмоток этих электродвигателей непосредственно к выходам трехфазного генератора переменного тока 2. Эти контроллеры, в зависимости от выбранного оператором направления движения платформы, осуществляют передачу на электродвигатели 14, 15 выходного напряжения генератора 2 с прямым или обратным чередованием его фаз. Изменение чередования этих фаз приводит к изменению направления вращения роторов электродвигателей 14, 15 и к изменению направления вектора тяги водоходного движителя.
В этом случае изменения скорости движения платформы осуществляется путем регулирования угловой скорости вращения ДВС Это приводит к изменению частоты выходного напряжения генератора 2 и соответствующему изменению скорости вращения электродвигателей 14, 15 и соединенных с ними рабочих колес водоходного движителя, в том числе скорости тандемвращения двух механически соединенных между собой рабочих колес (винтов, шнеков и т.п.) или контрвращения двух рабочих колес, каждый из которых соединен с полуротором контрроторного электродвигателя.
Для осуществления поворота платформы при движении на воде может использоваться либо приведение во вращение гусениц или колес с различной скоростью, либо включение водометов или импеллеров в противоположных направлениях путем задания на обмотки асинхронных электродвигателей 14, 15 их привода переменных трехфазных напряжений с различными порядками чередования фаз.
Если в качестве электродвигателей водоходных движителей 14, 15 используются синхронные вентильно-индукторные электродвигатели или электродвигатели с постоянными магнитами, то контроллеры водоходного движителя 16, 17, выполненные в виде инверторов (частотных преобразователей, коммутаторов и т.п.), содержащие силовые транзисторные преобразователи и подключенные к силовым шинам 19, осуществляют формирование и передачу на обмотки электродвигателей 16, 17 переменного напряжения, частота и амплитуда которого устанавливаются в соответствии с заданным направлением и заданной скоростью движения платформы на воде. Благодаря этому осуществляется плавное управление ее движением.
Дополнительно цифровой вычислитель (контроллер верхнего уровня) может осуществлять формирование сигналов управления исполнительными механизмами поворота направляющих насадок или рулей в горизонтальной плоскости, осуществляя изменение направление вектора тяги водоходного движителя.
В случае проникновения воды в корпус платформы, выявляемого соответствующим бортовым датчиком, система управления осуществляет автоматическое включение привода водооткачивающего устройства (помпы).
Для специалистов в данной области техники также понятно, что кроме описанных вариантов плавающей транспортной платформы возможны также иные варианты ее реализации на основе признаков, изложенных в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ ПЛАВАЮЩАЯ МАШИНА | 2018 |
|
RU2714551C1 |
| Самоходная машина (варианты) | 2023 |
|
RU2841418C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| МАЛОГАБАРИТНЫЙ ГУСЕНИЧНЫЙ ВЕЗДЕХОД С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ, ПОЛНОСТЬЮ РАСПОЛОЖЕННОЙ В ПОДГУСЕНИЧНОМ ПРОСТРАНСТВЕ | 2023 |
|
RU2809167C1 |
| МАЛОГАБАРИТНЫЙ ГУСЕНИЧНЫЙ ВЕЗДЕХОД С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2023 |
|
RU2811594C1 |
| МАЛОГАБАРИТНЫЙ ГУСЕНИЧНЫЙ КАТЕР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2023 |
|
RU2836745C1 |
| КОМБИНИРОВАННЫЙ ПРИВОД ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2670185C1 |
| ПЛАВАЮЩАЯ ГУСЕНИЧНАЯ МАШИНА | 2002 |
|
RU2246682C2 |
Изобретение относится к транспортным платформам грузовых, пассажирских, промышленных, военных и сельскохозяйственных машин, приспособленных для самостоятельного передвижения по земле (суше) и по воде. Транспортная платформа, приспособленная для установки на нее функционального оборудования, содержит водонепроницаемый корпус, бортовой источник электрической энергии, выполненный в виде двигателя внутреннего сгорания с соединенным с ним генератором и/или аккумуляторной батареи, а также водоходный и сухопутный движители, имеющие независимые электромеханические приводы. Водоходный движитель выполнен в виде водометов или импеллеров с приводом от электродвигателей преимущественно кольцевого типа, имеющих внешний статор и полый ротор, внутри которого установлено одно или несколько рабочих колес (винтов, шнеков и т.п.). Эти электродвигатели могут быть контрроторными, имеющими внешний статор и два кольцевых полых полуротора, механически соединенных с соосными контрвинтами, установленными внутри этих полуроторов. Статор может быть секционированным, выполненным с различным чередованием фаз в его секторах, обеспечивающим противовращение полуроторов. Каждый винт (шнек), прикрепленный к ротору или полуротору, может быть выполнен без центральной ступицы и без центрального вала. Если на платформе установлен многофазный генератор переменного тока, то управление асинхронными электродвигателями водоходного движителя может осуществляться путем их прямого подключения к генератору с изменением порядка чередования фаз. Система электрооборудования платформы реализует управление ее функциональным оборудованием и приводами сухопутного и водоходного движителей, а также защиту ее составных частей от повреждений и аварийных режимов работы. Изобретение обеспечивает упрощение конструкции, повышение надежности и скорости движения плавающей транспортной платформы на воде. 10 з.п. ф-лы, 1 ил.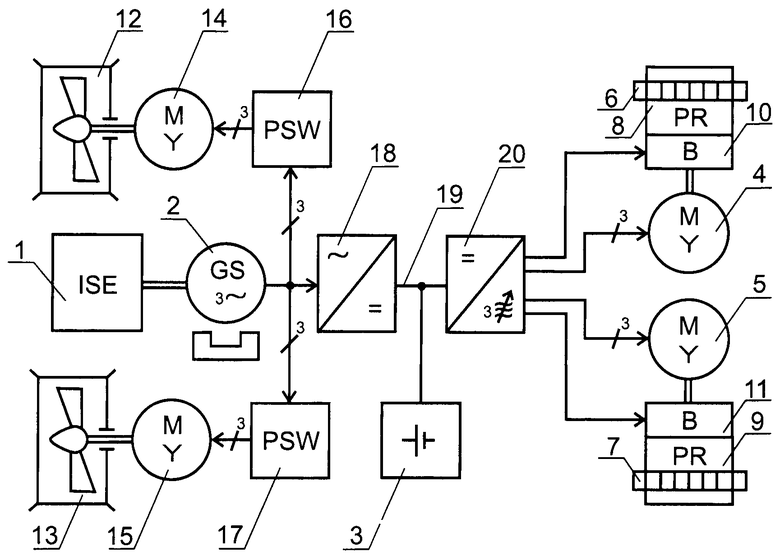
1. Плавающая транспортная платформа, приспособленная для установки на нее функционального оборудования и содержащая водонепроницаемый корпус, бортовой источник электрической энергии, водоходный движитель, выполненный в виде по меньшей мере одного водомета или импеллера, привод водоходного движителя, сухопутный движитель, электромеханический привод сухопутного движителя, выполненный с возможностью управляемой передачи энергии от бортового источника электрической энергии к этому движителю, отличающаяся тем, что привод водоходного движителя выполнен электромеханическим и приспособлен для передачи энергии от бортового источника электрической энергии по меньшей мере к одному водомету или импеллеру.
2. Плавающая транспортная платформа по п. 1, отличающаяся тем, что привод водоходного движителя выполнен в виде по меньшей мере одного электродвигателя кольцевого типа, имеющего внешний статор и полый ротор, внутри которого установлено по меньшей мере одно рабочее колесо.
3. Плавающая транспортная платформа по п. 1, отличающаяся тем, что привод водоходного движителя выполнен в виде контрроторного электродвигателя, имеющего статор и два полуротора, механически соединенных с соосными рабочими колесами, приспособленными для контрвращения.
4. Плавающая транспортная платформа по п. 3, отличающаяся тем, что контрроторный электродвигатель имеет внешний статор и два внутренних кольцевых полых полуротора, внутри каждого из которых установлено рабочее колесо.
5. Плавающая транспортная платформа по п. 3, отличающаяся тем, что по меньшей мере один электродвигатель выполнен асинхронным секционированным контрроторным, причем секции его статора выполнены с различным чередованием фаз, обеспечивающим противовращение полуроторов.
6. Плавающая транспортная платформа по одному из пп. 2, 3, 4 или 5, отличающаяся тем, что по меньшей мере одно рабочее колесо прикреплено к ротору или полуротору и выполнено без центральной ступицы и без центрального вала.
7. Плавающая транспортная платформа по п. 1, отличающаяся тем, что бортовой источник электрической энергии выполнен в виде аккумуляторной батареи и/или двигателя внутреннего сгорания и соединенного с ним генератора, а электромеханический привод сухопутного движителя содержит по меньшей мере один тяговый электродвигатель, соединенный с сухопутным движителем через механическую передачу, и контроллер тягового электродвигателя, включенный между выходом генератора и/или аккумуляторной батареи и обмотками тягового электродвигателя.
8. Плавающая транспортная платформа по п. 1, отличающаяся тем, что привод водоходного движителя содержит по меньшей мере один электродвигатель и по меньшей мере один контроллер этого привода, включенный между выходом генератора и/или аккумуляторной батареи и обмотками по меньшей мере одного указанного электродвигателя.
9. Плавающая транспортная платформа по п. 7 или 8, отличающаяся тем, что на ней установлен многофазный генератор переменного тока, причем по меньшей мере один контроллер электродвигателя привода водоходного движителя выполнен с возможностью переключения порядка чередования фаз переменного тока, поступающего по меньшей мере на один электродвигатель привода водоходного движителя.
10. Плавающая транспортная платформа по п. 8, отличающаяся тем, что по меньшей мере один контроллер электродвигателя привода водоходного движителя содержит силовой транзисторный преобразователь и микроконтроллер, приспособленный для управления этим преобразователем.
11. Плавающая транспортная платформа по п. 1, отличающаяся тем, что она оснащена системой управления функциональным оборудованием и приводами сухопутного и водоходного движителей, выполненной с возможностью реализации функций их защиты от аварийных режимов работы.
| Вездеходный транспортный робот | 2016 |
|
RU2615808C1 |
| US 20120290164 A1, 15.11.2012 | |||
| АЭРОСАНИ-АМФИБИЯ | 1997 |
|
RU2100242C1 |
| СПОСОБ ПЛАСТИКИ ДЕФЕКТОВ ТКАНИ | 0 |
|
SU239500A1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2004 |
|
RU2269737C2 |
| US 20140291440 A1, 02.10.2014. | |||

