Предлагаемое техническое решение относится к области космической техники и может быть использовано для определения и выбора объекта наблюдения с орбитального космического аппарата (КА), движущегося по околокруговой орбите.
Известен глобус (см. [1], с.93-97), который можно использовать, в частности, для определения и выбора объектов наблюдений, выполняемых с КА. Недостатком данного устройства является отсутствие элементов, позволяющих отобразить информацию об орбите и трассе КА. Известен также учебный прибор по навигации [2], включающий основание, стойку, модель планеты, которая выполнена в виде глобуса, модель орбиты КА, выполненную в виде кольца и смонтированную на подшипнике стойки. Используя данный прибор, можно, в том числе, моделировать положение орбиты КА над глобусом - моделью планеты - и выбирать объекты на поверхности планеты, доступные наблюдению с КА.
Наиболее близким из аналогов, принятым за прототип, является устройство [3], включающее звездный глобус с охватывающими его двумя кольцами, установленными с совмещением центров колец с центром глобуса. При этом одно кольцо закреплено над точками полюсов глобуса с возможностью поворота вокруг оси вращения глобуса, проходящей через полюса глобуса, а другое кольцо установлено с возможностью выставки кольца под любым задаваемым углом к экватору глобуса.
Внешний вид устройства [3] представлен на фиг.1.
Работа с устройством осуществляется следующим образом. Глобус поворачивают относительно кольца, позволяющего выставку кольца относительно глобуса под любым задаваемым углом к экватору глобуса, в положение, при котором данное кольцо составляет с экватором глобуса угол, равный углу наклонения орбиты КА. Тем самым данное кольцо моделирует виток орбиты КА. Дальнейшим поворотом глобуса вокруг оси его вращения устанавливают глобус в положение, при котором данное кольцо пересекает экватор глобуса в точке экватора с долготой, равной значению долготы восходящего узла рассматриваемого витка орбиты КА. При этом данное кольцо покажет на глобусе мгновенную проекцию орбиты КА на поверхность глобуса. В качестве возможных объектов наблюдения с КА выбираются объекты, расположенные на поверхности глобуса вдоль смоделированного положения витка орбиты КА.
Если в данном устройстве в качестве глобуса использовать глобус Земли (т.е. отобразить на шаровой поверхности глобуса вместо карты небесной сферы карту земной поверхности), данное устройство позволяет отображать мгновенную проекцию орбиты КА на поверхность земного глобуса. Учитывая, что орбитальные КА движутся в инерциальном пространстве, относительно которого Земля делает один оборот в сутки и при этом существует эффект прецессии орбиты КА в инерциальном пространстве, то мгновенная проекция орбиты КА на поверхность глобуса будет непрерывно меняться по мере движения КА по орбите - т.е. невозможно получить одновременное отображение всего витка орбиты КА на поверхности глобуса. Данный эффект существует и для глобуса небесной сферы, и для глобуса земной поверхности. Если в первом случае данный эффект не так велик и часто не учитывается, то во втором случае он значителен и его учет обязателен.
Таким образом, устройство, принятое за прототип, имеет существенный недостаток - оно не позволяет одновременно отобразить на глобусе с нанесенной на нем картой всю трассу витка орбиты КА.
Задачей, стоящей перед предлагаемым устройством, является определение и выбор объектов наблюдений, выполняемых с КА в течение целого витка орбиты путем обеспечения отображения на глобусе с картой одновременно всей трассы рассматриваемого витка орбиты КА.
Технический результат достигается тем, что устройство для выбора объекта наблюдения с орбитального космического аппарата включает глобус с нанесенной на него картой, два охватывающих глобус кольца, центры которых совмещены с центром глобуса, элемент в виде витка спирали, соответствующий осредненному витку орбиты движущегося по околокруговой орбите космического аппарата, начиная с восходящего узла витка орбиты, заданный в правой декартовой системе координат OXYZ, центр которой совмещен с центром глобуса и ось OZ направлена по оси вращения глобуса, координатами, рассчитанными по формулам:
x=r(cos(Δλu/(2π))cosu-sin(Δλu(2π))sinucosi),
y=r(sin(Δλu/(2π))cosu+cos(Δλu/(2π))sinucosi),
z=rsinusini,
где i - наклонение орбиты; r - радиус второго кольца; Δλ - угловое межвитковое расстояние орбиты по экваториальной шкале карты; u - параметр, принимающий значения от 0 до 2π; при этом первое кольцо закреплено над точками полюсов глобуса с возможностью вращения кольца вокруг оси вращения глобуса, второе кольцо установлено в плоскости экватора глобуса и закреплено на первом кольце в точках пересечения первого кольца с плоскостью экватора глобуса, а элемент в виде витка спирали своей средней точкой, соответствующей значению параметра u, равному π, закреплен на втором кольце в точке пересечения второго и первого колец, а своими начальной и конечной точками, соответствующими значениям параметра u, равным, соответственно, 0 и 2π, закреплен в точках второго кольца, находящихся от другой точки пересечения второго и первого колец на угловом расстоянии - Δλ/2, соответственно, по и против направления положительного отсчета экваториальной шкалы карты.
В предлагаемом устройстве, в отличие от прототипа, введен дополнительно элемент в виде витка спирали, форма которого рассчитывается по значениям наклонения орбиты и углового межвиткового расстояния орбиты КА и который закреплен предложенным образом на втором кольце, а также используется карта поверхности, представляющей объекты для наблюдения с КА, в виде которой выступает как карта звездного неба, так и карта Земли или другой планеты.
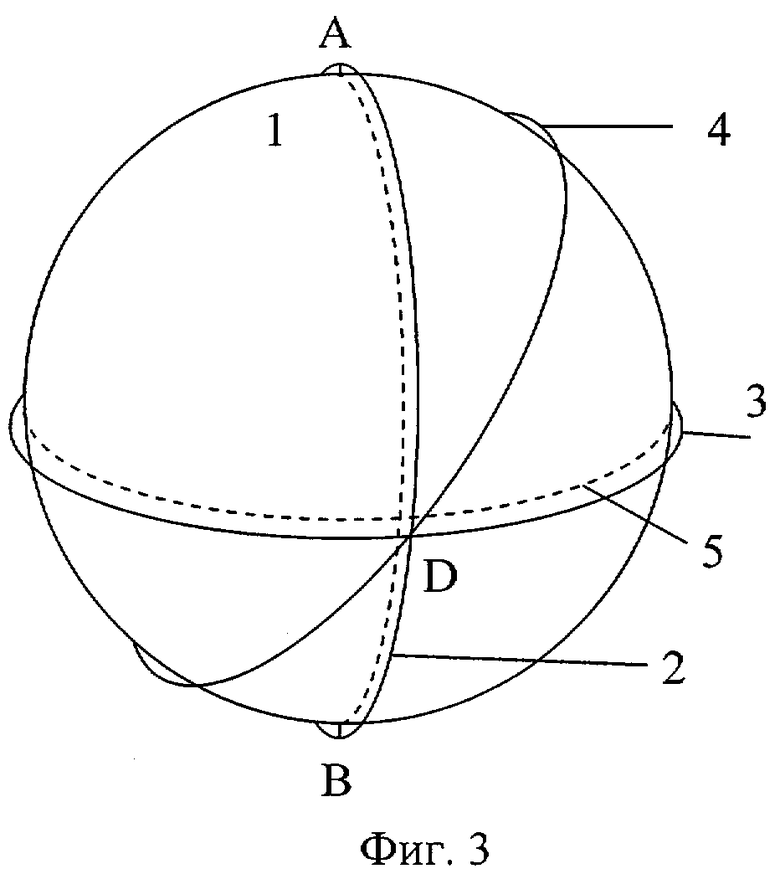
Суть предлагаемого устройства поясняется на фиг.1, 2, 3. При этом приведены: на фиг.1 - устройство-прототип; на фиг.2 - вид предлагаемого устройства с лицевой стороны, на фиг.3 - вид предлагаемого устройства с противоположной стороны.
На фиг.2 и 3 введены обозначения:
1 - глобус с нанесенной на него картой поверхности, представляющей объекты для наблюдения с КА;
2, 3 - первое и второе кольца, соответственно;
4 - элемент в виде витка спирали;
5 - экватор глобуса;
А, В - полюса глобуса;
С, D - точки крепления первого и второго колец;
Е, F - начальная и конечная точки элемента в виде витка спирали.
G, Н - проекции точек Е, F на экватор глобуса.
С учетом введенных обозначений: ось АВ - ось вращения глобуса; точка D - средняя точка элемента 4; HG - угловое межвитковое расстояние орбиты КА.
Виток орбиты КА, движущегося по околокруговой орбите вокруг планеты, задается в правой декартовой системе координат OXYZ с центром в центре планеты и осью OZ, направленной по оси вращения планеты, координатами, рассчитанными по формулам (см. [4], стр.18):



где i - наклонение орбиты; R - радиус орбиты; λ - долгота восходящего узла орбиты; u - текущее значение аргумента широты - параметра, принимающего на витке орбиты значения от 0 до 2π.
При движении по околокруговой орбите в течение витка орбиты КА значение λ, изменяется от значения λ0, равного долготе восходящего узла рассматриваемого витка орбиты КА и соответствующего моменту u=0, до значения λ0+Δλ, равного долготе восходящего узла следующего витка орбиты КА и соответствующего моменту u=2π:

где Δλ - угловое межвитковое расстояние по экватору. Величина Δλ при движении КА вокруг Земли определяется формулой (см. [5], стр.149):


где Δ Ω - витковая прецессия орбиты КА в инерциальной системе координат; Т - период обращения КА вокруг Земли; ω - угловая скорость вращения Земли в инерциальном пространстве; Rэ - экваториальный радиус Земли; р - фокальный параметр орбиты; i - наклонение орбиты; I2=-1082,2·10-6 - коэффициент потенциала гравитационного поля Земли.
Если в качестве карты используется карта небесной сферы, то в (3) убираем член, соответствующий повороту планеты относительно инерциального пространства. Отметим, что величины Δλ и Δ Ω отрицательны.
Если ось ОХ направить в точку восходящего узла рассматриваемого витка орбиты (в этой системе координат λ0=0) и заменить R на радиус второго кольца г (поскольку моделирующий виток орбиты КА элемент в виде витка спирали крепится на втором кольце, то берем радиус спирали равным радиусу второго кольца), то с учетом (2) формулы (1) принимают вид:
x=r(cos(Δλu/(2π))cosu-sin(Δλu(2π))sinucosi),
y=r(sin(Δλu/(2π))cosu+cos(Δλu/(2π))sinucosi), (5)
z=rsinusini,
Работа с устройством осуществляется следующим образом. Обозначим точкой G точку экватора (5) со значением долготы λ0, равным долготе восходящего узла рассматриваемого витка орбиты КА. Поворачиваем кольцо (2) относительно глобуса (1) таким образом, чтобы точка Е элемента (4) и кольца (3) располагалась над точкой G экватора (5) со значением долготы λ0. В таком положении элемент (4) одновременно моделирует расположение всех точек рассматриваемого витка орбиты КА над глобусом: элемент (4) показывает положение всех точек витка орбиты КА над поверхностью глобуса с учетом движения КА вдоль витка орбиты, поворота плоскости орбиты и вращения Земли в течение рассматриваемого витка орбиты КА. В качестве возможных объектов наблюдения с КА выбираются объекты, расположенные на поверхности глобуса вдоль смоделированного элементом (4) положения витка орбиты КА.
Опишем технический эффект предлагаемого изобретения. Предлагаемое устройство позволяет осуществлять выбор объектов наблюдений, выполняемых с КА в течение целого витка орбиты путем обеспечения отображения на глобусе с картой одновременно всей трассы рассматриваемого витка орбиты КА. Технический результат достигается за счет введения в устройство дополнительного элемента в виде витка спирали, форма которого рассчитывается по осредненным значениям наклонения орбиты и углового межвиткового расстояния орбиты по экватору глобуса, а также предложенной установки данного элемента в устройстве.
ЛИТЕРАТУРА
1. Красавцев Б.И. Мореходная астрономия. М.: Транспорт, 1986.
2. Заявка на изобретение №93045113/12 от 1993.09.14.
3. Звездный глобус ЗГ-ОМ1.1.
4. Бебенин Г.Г., Скребушевский Б.С., Соколов Г.А. Системы управления полетом космических аппаратов // М.: Машиностроение, 1978.
5. Инженерный справочник по космической технике. Изд-во МО СССР, М., 1969.

Устройство относится к космической технике. Устройство включает глобус с нанесенной на него картой, два охватывающих глобус кольца, центры которых совмещены с центром глобуса, элемент в виде витка спирали, соответствующий осредненному витку орбиты движущегося по околокруговой орбите КА, начиная с восходящего узла витка орбиты, заданный в правой декартовой системе координат OXYZ, центр которой совмещен с центром глобуса и ось OZ направлена по оси вращения глобуса, координатами, рассчитанными по формулам:
х=r(cos(Δλu/(2π))cosu-sin(Δλu/(2π))sinucosi),
у=r(sin(Δλu/(2π))cosu+cos(Δλu/(2π))sinucosi),
z=rsinusini, где i - наклонение орбиты; r - радиус второго кольца; Δλu - угловое межвитковое расстояние орбиты по экваториальной шкале карты; u - параметр, принимающий значения от 0 до 2π. При этом первое кольцо закреплено над точками полюсов глобуса с возможностью вращения кольца вокруг оси вращения глобуса. Второе кольцо установлено в плоскости экватора глобуса и закреплено на первом кольце в точках пересечения первого кольца с плоскостью экватора глобуса, а элемент в виде витка спирали своей средней точкой, соответствующей значению параметра u, равному π, закреплен на втором кольце в точке пересечения второго и первого колец. Техническим результатом является определение и выбор объектов наблюдений. 3 ил.
Устройство для выбора объекта наблюдения с орбитального космического аппарата, включающее глобус с нанесенной на него картой, два охватывающих глобус кольца, центры которых совмещены с центром глобуса, элемент в виде витка спирали, соответствующий осредненному витку орбиты движущегося по околокруговой орбите космического аппарата, начиная с восходящего узла витка орбиты, заданный в правой декартовой системе координат OXYZ, центр которой совмещен с центром глобуса и ось OZ направлена по оси вращения глобуса, координатами, рассчитанными по формулам:
х=r(cos(Δλu/(2π))cosu-sin(Δλu/(2π))sinucosi),
у=r(sin(Δλu/(2π))cosu+cos(Δλu/(2π))sinucosi),
z=rsinusini,
где i - наклонениие орбиты; r - радиус второго кольца; Δλ - угловое межвитковое расстояние орбиты по экваториальной шкале карты; u -параметр, принимающий значения от 0 до 2π, при этом первое кольцо закреплено над точками полюсов глобуса с возможностью вращения кольца вокруг оси вращения глобуса, второе кольцо установлено в плоскости экватора глобуса и закреплено на первом кольце в точках пересечения первого кольца с плоскостью экватора глобуса, а элемент в виде витка спирали своей средней точкой, соответствующей значению параметра u, равному π, закреплен на втором кольце в точке пересечения второго и первого колец, а своими начальной и конечной точками, соответствующими значениям параметра u, равным соответственно 0 и 2π, закреплен в точках второго кольца, находящихся от другой точки пересечения второго и первого колец на угловом расстоянии -Δλ/2, соответственно по и против направления положительного отсчета экваториальной шкалы карты.
| УСТРОЙСТВО для УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПО ТРЕМ ОСЯМ ОБЪЕКТА, УКРЕПЛЕННОГО НА ОПОРНОЙ ПЛАТФОРМЕ | 0 |
|
SU236598A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ | 2004 |
|
RU2272254C1 |
| УСТРОЙСТВО ДЛЯ НАБЛЮДЕНИЯ | 1989 |
|
SU1779131A1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВЫЙ МОДУЛЬ И КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, СВЯЗИ, ОСВЕЩЕНИЯ ОБСТАНОВКИ, УПРАВЛЕНИЯ И КОНТРОЛЯ | 1992 |
|
RU2036432C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ХАРАКТЕРИСТИК ЗОНЫ НАЧАЛЬНОГО ПОИСКА СВЯЗНЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2003 |
|
RU2242790C1 |
| US 4837699, 06.06.1989. | |||

