Изобретение относится к навигации преимущественно морских судов и может быть применено для определения более чем одной навигационной величины с использованием средств космической навигации.
В настоящее время известны различные навигационные приборы и системы, обладающие высокой эффектвностью и обеспечивающие повышение безопасности движения.
Наиболее близким к предлагаемому является устройство подобного модуля, используемого в комплексе аппаратуры спутниковой радионавигационной системы NAVSTAR для летательного аппарата.
Известный инерциально-спутниковый модуль содержит приемоиндикатор спутниковой системы навигации, блок вработки относительных линейных и угловых координат спутника и объекта, выходы которого с первого по третий соединены соответственно с входами приемоиндикатора спутниковой навигационной системы с первого по третий, блок инерциальных датчиков и вычислитель вектора состояния объекта, первый и второй выходы которого соединены соответственно с первым и вторым выходами блока инерциальных датчиков.
Такой модуль решает задачу определения координат движущегося объекта на основании интегрирования ускорений в системе координат, связанной с местным горизонтом. Оценка погрешностей в данном модуле производится путем построения оптимального фильтра Калмана. Для построения последнего необходимо знание моделей погрешностей измерителей и возмущений, действующих на них. Реализация фильтра требует большой загрузки бортовой цифровой вычислительной системы при большом количестве оцениваемых параметров и связана с опасностью расхождения вычислительного процесса, что часто встречается на практике. Эти особености обуславливают недостаточную точность и надежность модуля и приводят к необходимости индивидуальной настройки навигационного фильтра.
Наиболее близкой к предлагаемой является комплексная инерциально-спутниковая система навигации, связи, освещения обстановки, управления и контроля, содержащая базовый инерциально-спутниковый модуль и последовательно соедиенные систему автоматического управления объектом, блок органов управления объектом и блок датчиков органов управления.
Такая комплексная система решает только навигационую задачу и ее свойства определяются характеристиками модуля, а именно она обладает недостаточной точностью и достоверностью из-за необходимости точного знания моделей погрешностей измерителей и возмущений, а также из-за возможности расхождения вычислительного процесса.
Техническим результатом изобретения является повышение доствоерности и точности выработки навигационых параметров, осуществляемой инерциально-спутниковым модулем, а также повышение достоверности вычислений, что позволило бы на базе получаемой более полной и точной информации о векторе состояния судна повысить безопасность судовождения, улучшить мореходность судна и контролировать его прочностные характеристики.
Это достигается тем, что в инерциально-спутниковый модуль, содержащий приемоиндикатор спутниковой системы навигации, блок выработки относительных линейных и угловых координат спутника и объекта, выходы которого с первого по третий соединены соответственно с входами приемоиндикатора спутниковой навигационной системы с первого по третий, блок инерциальных датичков и вычислитель вектора состояния объекта, первый и второй входы которого соединены соответственно с первым и вторым выходами блока инерциальных датчиков, введены блок выработки поправок, блок определения интегральных погрешностей, блок компенсации интегральных погрешностей, блок определения физических поправок и блок компенсации физических поправок, причем первый и второй выходы блока компенсации интегральных погрешностей соединены соответственно с первым и вторым входами блока выработки поправок и блока выработки относительных линейных и угловых координат спутника и объекта, третий вход которого соединен с первым выходом блока компенсации физических поправок, третий и четвертый входы блока выработки поправок соединены соответственно с первым и вторым выходами приемоиндикатора спутниковой системы навигации, а первый и второй выходы соединены соответственно с первым и вторым входами блока определения интегральной погрешности, первый и второй выходы которого соединены соответственно с первым и вторым входом блока определения физической погрешности и первым и вторым входом блока компенсации интегральной погрешности, тертий и четвертый входы которого соединены соответственно с первым и вторым выходами вычислителя вектора состояния объекта, входы блока компенсации физической погрешности с первого по четвертый соединены соответственно с выходами с первого по четвертый блока определения физической погрешности, а входы с пятого по восьмой соединены соответственно с выходами с третьего по шестой вычислителя вектора состояния объекта, первый и второй выходы блока компенсации интегральных погрешностей, первый, второй, третий и четвертый выходы блока компенсации физических погрешностей являются выходами инерциально-спутникового модуля соответственно с первого по шестой, седьмым его выходом является третий выход приемоиндикатора спутниковой навигационной системы.
Технический результат изобретения достигается также тем, что в комплексную инерциально-спутниковую систему навигации, связи, освещения обстановки, управления и контроля, содержащую базовый инерциально-спутниковый модуль и последовательно соединенные систему автоматического управления объектом, блок органов управления объектом и блок датчиков органов управления, введены n инерциально-спутниковых модулей, разнесенных по корпусу объекта, n блоков определения линейных деформаций, n блоков определения угловых деформаций, а также блок индикаторов, имеющий n первых и n вторых входов, блок регистрации, имеющий n первых и n вторых входов, блок определения возмущающих сил, блок определения инерционных сил, блок определения управляющих сил, блок навигационной связи и блок освещения навигационной обстановки, причем первый вход i-го блока определения линейных деформаций (i 1.n) соединен с седьмым выходом базового инерциально-спутникового модуля, а второй вход с седьмым выходом i-го инерциально-спутникового модуля, первый вход i-го блока определения угловых деформаций соединен с третьим выходом базового инерциально-спутникового модуля, а второй вход с третьим выходом i-го инерциально-спутникового модуля, входы системы автоматического управления объектом с первого по девятый соединены соответственно с выходами базового инерциально-спутникового модуля с третьего по шестой, с первым и вторым выходами базового инерциально-спутникового модуля, выходом блока определения возмущающих сил, блоком датчиков органов управления и выходом блока освещения навигационной обстановки, первый и второй входы блока определения возмущающих сил соединены соответственно с выходом блока определения инерциальных сил и выходом блока определения управляющих сил, вход которого соединен с выходом блока датчиков органов управления, первый и второй входы блока навигационной связи соединены соответственно с первым и вторым выходами инерциально-спутникового модуля, а первый и второй выходы соединены соответственно с первым и вторым входами блока освещения навигационной обстановки, третий и четвертый входы которого соединены соответственно с первым и вторым выходами базового инерциально-суптникового модуля, входы блока определения инерционных сил с первого по четвертый соединены соответственно с выходами базового инерциально-спутникового модуля с третьего по шестой, n первых входов блока индикации соединены соответственно с выходами n блоков определения линейных деформаций, n вторых его входов соединены соответственно с выходами n блоков определения угловых деформаций, n вторых его входов соединены соответственно с выходами n блоков определения угловых деформаций, третий вход соединен с третьим выходом базового инерциально-спутникового модуля, четвертый с выходом блока освещения навигационной обстановки, а пятый и шестой входы соединены соответственно с первым и вторым выходами базового инерциально-спутникового модуля, n первых входов блока регистрации соединены соответственно с выходами n блоков определения линейных деформаций, а n его вторых входов соответственно с выходами n блоков определения угловых деформаций.
В предлагаемом инерциально-спутниковом модуле осуществляется непрерывная оценка погрешностей шести параметров объекта (трех пространственных координат и трех проекций линейной скорости) путем определения девяти интегральных параметров по каждой из шести погрешностей методом наименьших квадратов и последующего определения этих шести погрешностей, а также определения физических погрешностей (погрешностей измерения составляющих ускорения, углов качки и рыскания, угловых скоростей и ускорений) по определенному алгоритму и непрерывная компенсация измеренных погрешностей в процессе работы инерциально-спутникового модуля.
Предлагаемая комплексная система навигации, связи, освещения обстановки, управления и контроля основана на использовании наиболее полной и точной информации о параметрах абсолютного движения судна, являющегося объектом управления, и о параметрах его относительного движения по отношению к встречным судам, о текущих значениях возмущающих сил, действующих на управляемый подвижный объект, о текущих значениях линейных и угловых деформаций корпуса управляемого подвижного объекта, что в совокупности позволяет реализовать в рассматриваемой комплексной системе оптимальный и адаптивный закон управления подвижным объектом во всех условиях эксплуатации, в том числе и в экстремальных условиях.
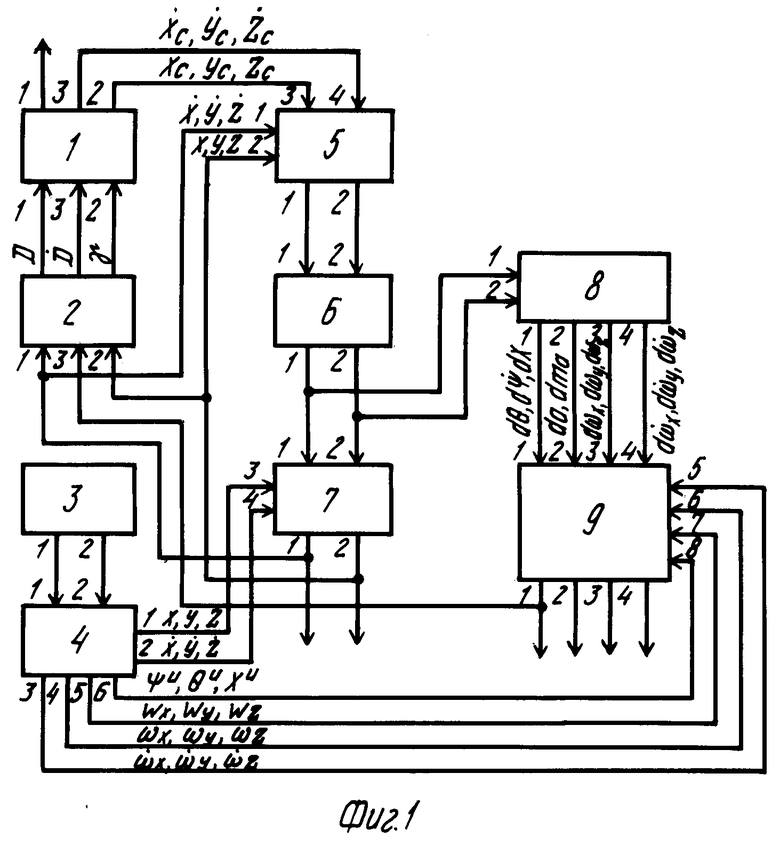
На фиг.1 представлена структурная схема инерциально-спутникового модуля; на фиг. 2 структурная схема комплексной системы навигации, связи, освещения обстановки, управления и контроля.
На чертежах позициями обозначены: приемоиндикатор 1 спутниковой навигационной системы, блок 2 выработки относительных линейных и угловых координт спутника и объекта, блок 3 инерциальных датчиков, вычислитель 4 вектора состояния объекта, блок 5 выработки поправок, блок 6 определения интегральных погрешностей, блок 7 компенсации интегральных погрешностей, блок 8 определения физических погрешностей, блок 9 компенсации физических погрешностей, базовый инерциально-спутниковый модуль 10, первый 11 и i-й 12 инерциально-спутниковые модули, блок 13 определения линейных деформаций, блок 14 определения угловых деформаций, блок 15 индикаторов, блок 16 регистрации, блок 17 навигационной связи, блок 18 освещения навигационной обстановки, система 19 автоматического управления объектом, блок 20 определения инерционных сил, блок 21 определения управляющих сил, блок 22 определения возмущающих сил, блок 23 датчиков органов управления, блок 24 органов управления объектом.
Инерциально-спутниковый модуль (фиг.1) включает приемоиндикатор 1 спутниковой навигационной системы, состоящий из последовательно соединенных антенны, усилителя высокой частоты, первого смесителя, усилителя промежуточной частоты, второго смесителя, а таже из m параллельных цепей, каждая из которых состоит из блока выделения допплеровской частоты, коррелятора и аналого-цифрового преобразователя (АЦП). Входы блоков выделения допплеровской частоты объединены и соединены с выходом второго смесителя, выходы АЦП соединены с входами управляющего процессора (УП), управляющие входы коррляторов соединены с выходами генератора кода, управляющие входы смесителей соединены с выходами генератора опорной частоты, приемник имет три входа, которые соединены с входом УП, и три выхода, при этом первый выход через фазовый детектор соединен с выходом второго смесителя, а второй и третий выходы соединены с выходами УП. Блок 2 выработки относительных линейных и угловых координат спутника и объекта осдержит датчик параметров движения спутника и вычислитель соответствующих параметров относительного движения. Блок 2 имеет три входа и три выхода. Блок 3 инерциальных датчиков представляет собой три акселерометра и три лазерных гироскопа и имеет два выхода. Вычислистель 4 вектора состояния объекта имеет два входа и шесть выходов. Блок 5 выработки поправок представляет собой блок вычитателей и имеет первый, второй, третий и четвертый входы и первый и второй выходы. Блок 6 определения интегральных погрешностей представляет собой набор сумматоров и интеграторов, выполняющих по определенному алгоритму ряд операций и имеет первый и второй входы и первый и второй выходы. Блок 7 компенсации интегральных погрешностей представляет собой набор сумматоров и имеет первый, второй, третий и четвертый входы и первый и второй выходы. Блок 8 определения физических погрешностей представляет собой набор сумматоров и умножителей и имеет первый и второй входы и четыре выхода. Блок 9 компенсации физических погрешностей представляет собой набор сумматоров и имеет восемь входов и четыре выхода.
Блоки связаны между собой следующим образом: первый, второй и третий входы приемоиндикатора 1 спутниковой навигационной системы соединены соответственно с первым, вторым и третьим выходами блока 2 выработки относительных линейных и угловых координат, первый и второй входы которого соединены с первым и вторым входами блока 5 выработки поправок, третий и четвертый входы блока 5 соединены соответственно с вторым и третьим выходами приемоиндикатора 1, первый и второй выходы блока 5 соединены с первым и вторым входами блока 6 определения интегральных погрешностей, первый и второй выходы которого соединены соответственно с первым и вторым входами блока 7 компенсации интегральных погрешностей и с первым и вторым входами блока 8 определения физических погрешностей, первый, второй, третий и четвертый выходы блока 8 соединены с первым, вторым, третьим и четвертым входами блока 9 компенсации физических погрешностей, первый и второй выходы блока 3 инерциальных датчиков соединены с первым и вторым входами вычислителя 4 вектора состояния объекта, первый и второй выходы которого соединены соответственно с третьим и четвертым входами блока 7 компенсации интегральных погрешностей, третий, четвертый, пятый и шестой выходы вычислителя 4 соединены с пятым, шестым, седьмым и восьмым входами блока 9 компенсации физических погрешностей, первый и второй выходы блока 7 соединены с первым и вторым входами блока 2 выработки относительных линейных и угловых координат, третий вход блока 2 соединен с первым выходом блока 9, выходами инерциально-спутникового модуля являются четыре выхода блока 9 и первый и второй выходы блока 7, а также первый выход приемоиндикатора 1.
Инерциально-спутниковый модуль работает следующим образом.
Акселерометры блока 3 инерциальных датчиков вырабатывают сигналы, пропорциональные угловым скоростям поворота относительно связанных осей. Сигналы с выхода блока 3 поступают в вычислитель 4 вектора состояния объекта. Блок 3 и вычислитель 4 реализуют бесплатформенную инерциально-навигационную систему (БИНС). На выходе вычислителя 4 вектора состояния объекта вырабатываются сигналы, пропорциональные линейным координатам Xc, Yc, Zc и линейным скоростям Xc, Yс, Zc судна в общеземной системе координат, углам крена дифферента и рысканья, а также бковому ускорению судна, угловым скоростям и угловым ускорениям судна. Эти сигналы, как правило, содержат большие погрешности, которые накапливаются со временем, что свойственно инерциальным системам. Сигналы с первого и второго выходов (линейные координаты и скорости) вычислителя 4 вектора состояния объекта подаются на третий и четвертый входы блока 7 компенсации интегральных погрешностей. Приемоиндикатор 1 спутниковой навигционной системы вырабатывает сигналы высокой точности, пропорциональные линейным координатам и линейным скоростям судна, которые подаются на третий и четвертый входы блока 5 выработки поправок. Аналогичные сигналы, вырабатываемые ИНС (блок 3 и вычислитель 4), через блок 7 поступают на первый и второй входы блока 5, который вырабатывает сигналы погрешностей в измерении координат и скоростей и подает их на вход блока 6 определения интегральных погрешностей. При этом на первом выходе блока 5 вырабатываются сигналы погрешностей в измерении координат, а на втором выходе блока 5 сигналы погрешностей в измерении линейных скоростей. Установлено, что ошибка ИНС может быть представлена многочленом, который содержит тригонометрические члены с Шулеровским и суточным периодами и их комбинации и имеет вид
Δxi aio + ai1 cos Ut + ai2 sin Ut +
+ai3 cos (ν U)t + ai4 sin ( ν- U) +
+ai5 cos νt + ai6 sin νt + ai7 cos (ν + U)t +
+ai8 sin (ν + U)t + δxi (i 1, 2.6) (1) где Δxi погрешность измерения ИНС каждой из трех географических координат и трех составляющих вектора скорости;
ν круговая частота, соответствующая периоду Шулера;
U круговая частота, соответствующая суточному периоду;
δxi случайная составляющая;
aik интегральные параметры, подлежащие определению (К 0, 1.8)
В предлагаемом модуле реализуется методика оценки погрешностей шести параметров (трех координат и трех проекций линейной скорости) путем определения девяти интегральных параметров по каждой из шести погрешностей методом наименьших квадратов и последующим определением этих погрешностей в соответствии с выражением (1) как заданных функций времени. Эта оценка производится в блоке 6 определения интегральных погрешностей.
В соответствии с методом наименьших квадратов интегральные параметры aik (i 1.6, K 0, 1.8) могут быть опрдеелены путем решения следующей алгебраической системы уравнений. Для первой погрешности (погрешность ▿ х1) эта система имеет вид +
+ cosuтdτ+
cosuтdτ+ sinuτdτ+
sinuτdτ+ cos(ν-u)τdτ+
cos(ν-u)τdτ+
+ sin(ν-u)τdτ+
sin(ν-u)τdτ+ cosντdτ+
cosντdτ+ sinντdτ
sinντdτ cosuτdτ+
cosuτdτ+ cos2uτdτ+
cos2uτdτ+ sinuτcosuτdτ+
sinuτcosuτdτ+
+ cos(ν-u)τcosuτdτ+
cos(ν-u)τcosuτdτ+ sin(ν-u)τcosuτdτ+
sin(ν-u)τcosuτdτ+
+ cosντcosuτdτ+
cosντcosuτdτ+ sinντcosuτdτ+
sinντcosuτdτ+
+ cos(ν+u)τcosuτdτ+
cos(ν+u)τcosuτdτ+ sin(ν+u)τcosuτdτ=
sin(ν+u)τcosuτdτ= ▿x1(τ)cosuτdτ; (2)
▿x1(τ)cosuτdτ; (2) sin(ν+u)τdτ+
sin(ν+u)τdτ+ cosuτsin(ν+u)τdτ+
cosuτsin(ν+u)τdτ+
+ sinuτsin(ν+u)τdτ+
sinuτsin(ν+u)τdτ+ cos(ν-u)τsin(ν+u)τdτ+
cos(ν-u)τsin(ν+u)τdτ+
+ cos(ν+u)τsin(ν+u)τdτ+
cos(ν+u)τsin(ν+u)τdτ+ sin2(ν+u)τdτ=
sin2(ν+u)τdτ=  ▿x1(τ)sin(ν+u)τdτ, где
▿x1(τ)sin(ν+u)τdτ, где  (К 0, 1.8) оценки параметров а1К;
(К 0, 1.8) оценки параметров а1К;
τc период наблюдения;
▿x1(t)=Δx
▿х1 выходной сигнал блока 5.
Аналогично системе уравнений (2) записываются системы уравнений для других пяти погрешностей ▿xi (i 2, 3.6)
Таким образом, в блоке 6 определения интегральных погрешностей производится оценка 54-х интегральных параметров (шесть систем уравнений по девять уравнений в каждой).
После определения в блоке 6 интегральных параметров (i 1.6, К 0.8) в этом же блоке производится умножение каждого из определенных параметров на соответствующую функцию времени в сооответствии с уравнением (1). Таким образом, на выходе блока 6 вырабатываются сигналы оценок каждой из шести погрешностей инерциальной системы (три координаты места и три проекции вектора скорости). Эти сигналы поступают на входы блока 7 компенсации интегральных погрешностей, где путем суммирования их с соответствующими выходными сигналами ИНС вырабатываются откорректированные текущие значения трех координат места и трех составляющих вектор скорости судна.
Кроме коррекции указанных сигналов в инерциально-спутниковом модуле производится коррекция физических параметров, вырабатываемых ИНС (блок 3 и вычислитель 4):
трех угловых координат судна (дифферент ν, рысканье Ψ крен κ);
трех проекций угловых скоростей судна на связанные оси ωх, ωy, ωz);
трех проекций углового ускорения судна  ,
,  ,
,  на связанные оси;
на связанные оси;
проекции линейного ускорения судна Wx, Wy, Wz на общеземные оси.
Оценка данных физических параметров, не наблюдаемых с помощью приемника 1, производится путем выработки оценок погрешностей этих параметров, а именно
погрешностей измерения трех углов начальной ориентации судна dν, dΨ, dκ;
погрешностей измерения трех проекций угловой скорости и углового укорения на связанные оси dωx,d ωy, dωz, d , d
, d , d
, d ;
;
смещения нуля каждого из трех акселерометров dWx, dWy, dWz;
погрешности масштабного коэффициента каждого из трех акселерометров dmx, dmy, dmz.
Оценка перечисленных погрешностей производится блоком 8.
Установлено, что погрешности физических параметров связаны с интегральными параметрами посредством следующих зависимостей:
dν 
 f
f и т.д.);
и т.д.);
fik априорно известные численные коэффициенты.
В блоке 8 производится периодическое (с периодом, равным интервалу наблюдения Т) вычисление оценок погрешностей физических параметров ν, запоминание их на интервале наблюдения Т и замещение оценок, выработанных на предыдущем интервале наблюдения, оценками, выработанными по прошествии текущего интервала наблюдения. Сигналы оценок с выхода блока 8 поступают на входы блока 9 компенсации погрешностей физических параметров. При этом на первый вход блока 9 поступают сигналы трех угловых погрешностей ИНС, на второй вход сигналы погрешностей смещения нуля и масштабного коэффициента трех акселермоетров, на третий вход сигналы погрешностей измерения трех составляющих угловой скорости судна, на четвертый вход сигналы погрешностей трех составляющих углового ускорения судна.
Одновременно с выхода вычислителя 4 вектора состояния объекта 4 на входы блока 9 поступают сигналы трех составляющих вектора углового ускорения, на шестой вход блока 9 сигналы трех составляющих вектора угловой скорости, на седьмой вход блока 9 проекции вектора линейного ускорения судна на связанные оси, на восьмой вход блока 9 сигналы углов поворота судна относительно трех связанных осей.
В блоке 9 осуществляется коррекция физических параметров ИНС по следующим формулам:
Wx (Wxи + dWx) (mx + dmx),
Wy (Wyи + dWy) (my + dmy),
Wz (Wzи + dWz) (mz + dmz);
ωх ωхи + dωx, ωy ωyи + dωy;
ωz ωzи + dωz; =
= +d
+d ,
,  =ω
=ω ,
,  =
= +d
+d ; (4)
; (4)
θ=θи+ dωy(τ)dτ+Δθи, Ψ=Ψи+
dωy(τ)dτ+Δθи, Ψ=Ψи+ dωz(τ)dτ+dΨи,
dωz(τ)dτ+dΨи,
κ=κи+ dωx(τ)dτ+dκи, где dWx, dWy, dWz; dmx, dmy, dmz;
dωx(τ)dτ+dκи, где dWx, dWy, dWz; dmx, dmy, dmz;
dωx, dωy, dωz; d , d
, d , d
, d ,
,
dθи, dΨи, dκи, оценки погрешностей физических параметров ИНС, вырабатываемые блоком 8;
Wxи, Wyи, Wzи; ωxи, ωyи, ωzи;  ,
,  ,
,  , θи, Ψи, κи физические параметры, вырабатываемые ИНС (блок 3 и вычислитель 4);
, θи, Ψи, κи физические параметры, вырабатываемые ИНС (блок 3 и вычислитель 4);
Wx, Wy, Wz; ωx, ωy, ωz;  ,
,  ,
,  , θ, Ψ, κ физические параметры, вырабатываемые блоком 9.
, θ, Ψ, κ физические параметры, вырабатываемые блоком 9.
Выходной сигнал с первого выхода блока 9, пропорциональный углам дифферента и крена, поступает на третий вход блока 2 выработки относительных линейных и угловых координат, на первый и второй входы которого поступают сигналы с первого и второго выходов блока 7. Эти сигналы пропорциональны текущим значениям координат и проекциям линейной скорости судна на оси общеземной системы координат.
В блоке 2 вырабатываются запрограммированные линейные координаты спутника в общеземной системе координат, проекции линейной скорости спутника на оси этой системы координат и угловые координаты спутника, при этом спутник выбирается из имеющихся в каталоге спутников Земли, исходя из условия обеспечения наиболее благоприятных условий связи со спутником, для чего на вход датчика поступает информация о текущих координатах судна. На основании выработанной информации вычислителем блока 2 определяются следующие параметры спутника:
дальность до спутника по формуле
D= ; (5)
; (5)
относительная скорость движения судна относительно спутника по формуле
 (
( -
- )(xc-x)+(
)(xc-x)+( -
- )(yc-y)+(
)(yc-y)+( -
- )(zc-z)
)(zc-z) ; (6)
; (6)
относительные угловые координаты спутника по формулам
ε= arcsin  П=arcsin
П=arcsin  , (7) где xc, yc, zc координаты места спутника в общеземной системе координат.
, (7) где xc, yc, zc координаты места спутника в общеземной системе координат.
Дифференцируя по времени алгебраические уравнения (7), получаем выражения первых производных по времени  ,
,  относительных угловых координат спутника ε, п.
относительных угловых координат спутника ε, п.
Выработанные значения относительных параметров движения спутника с выхода блока 2 поступают на входы УП приемоиндикатора 1.
В состав УП включен цифроимпульсный преобразователь, на выходе которого по значениям D и  вырабатываются стробирующие импульсы для управления блоками измерения относительной дальности и относительной скорости спутника. Эти сигналы поступают на входы коррелятора и блока выделения допплеровского смещения. Введение опорных стробирующих сигналов в приемнике позволяет существенно упростить аппаратуру приемника за счет сокращения числа каналов, осуществляющих поиск сигнала спутника по относительной дальности и относительной скорости движения. С другого выхода УП на вход антенны поступают сигналы управления диаграммой направленности фазовой антенной решетки, вырабатываемые УП по сигналам п, ε угловой ориентации спутника относительно судна и выходным сигналам ИНС.
вырабатываются стробирующие импульсы для управления блоками измерения относительной дальности и относительной скорости спутника. Эти сигналы поступают на входы коррелятора и блока выделения допплеровского смещения. Введение опорных стробирующих сигналов в приемнике позволяет существенно упростить аппаратуру приемника за счет сокращения числа каналов, осуществляющих поиск сигнала спутника по относительной дальности и относительной скорости движения. С другого выхода УП на вход антенны поступают сигналы управления диаграммой направленности фазовой антенной решетки, вырабатываемые УП по сигналам п, ε угловой ориентации спутника относительно судна и выходным сигналам ИНС.
Предлагаемый инерциально-спутниковый модуль обеспечивает решение поставленной задачи повышения точности и достоверности выработки навигационных параметров движения судна и повышения надежности вычислительных процессов благодаря выработке интегральных и физических погрешностей ИНС.
Комплексная система навигации, связи, освещения обстановки, управления и контроля включает базовый инерциально-спутниковый модуль и n дополнительных однотипных модулей, где число определяется числом характерных точек на судне, подлежащих контролю на относительную деформацию (угловую и линейную) под действием внешних возмущений (ветровых порывов, ударов волн и т.д.) с целью обеспечения безопасности выполнения текущих маневров судна, а также с целью повышения точности измерителей, установленных в этих точках, и накопления статических данных о деформациях, используемых для обеспечения оптимальных запасов прочности судна при строительстве судов данной серии.
Комплексная система навигации, управления и контроля (фиг.2) содержит базовый инерциально-спутниковый модуль 10; однотипные с ним первый модуль 11 и i-й модуль 12 (i 1-n); однотипные блоки 131 и 13iопределения линейных деформаций для первого и i-го модулей, каждый из которых представляет собой набор блоков сравнения; однотипные блоки 141и 14i определения угловых деформаций для первого и i-го модулей, каждый из которых представляет собой набор блоков сравнения; блок 15 индикаторов, имеющий n первых и n вторых входов; блок 16 регистрации, имеющий n первых и n вторых входов, представляющий собой набор самописцев; блок 17 навигационной связи, который представляет собой, например, приемник и передатчик космической системы радиосвязи "Инморсат", посредством которых ν-й встречный подвижный объект и наш подвижный объект транслируют через спутник свои абсолютные координаты места, а также их производные; блок 18 освещения навигационной обстановки, вырабатывающий относительные координаты между ν-м и нашим подвижным объектом, в том числе дальности до ν-го подвижного объекта и угла пеленга на ν-й подвижный объект, а также производные относительных координат; систему 19 автоматического управления объектом, которая имеет шесть входов от базвого инерциально-спутникового модуля 10, один вход от блока 18 освещения навигационной обстановки, а также два входа по действительному положению органов управления (руля, подруливающего устройства и др.) и по возмущающим силам (система имеет один выход); блок 20 определения инерционных сил, действующих на подвижный объект, представляющий собой набор множителей, сумматоров и дифференцирующих устройств; блок 21 определения управляющих сил, действующих на подвижный объект, представляющий собой набор множителей и сумматоров; блок 22 определения возмущающих сил, действующих на подвижный объект, пресдтавляющий собой набор сумматоров; блок 23 датчиков органов управления, представляющий собой в частном случае набор потенциометров; блок 24 органов управления, представляющих собой набор управляющих (рулевых) механизмов.
Блоки системы соединены между собой следующим образом.
Первый выход приемоиндикатора 1 базового инерциально-спутникового модуля 10 соединен с первыми входами блоков 131 и 13i определения линейных деформаций. Первый выход приемоиндикатора 1 модулей 11 и 12 соединен сответственно с вторым вхдом блоков 131 и 13i. Первый выход блока 9 базового модуля 10 соединен с третьим входом блока 15 и с первыми входами блоков 141 и 14i определения угловых деформаций. Второй вход каждого блока 141 и 14i соединен соответственно с выходом блоков 91и 9i. Выходы блоков 131 и 13i соединены соответственно с входами 11 и 1iблока 15 индикаторов и с входами 11 и 1i блока 16 регистрации. Выходы блоков 141 и 14i соединены сответственно с входами 21 и 2i блока 15 и с входами 21 и 2i блока 16. Первый и второй выходы блока 17 навигационной связи подключены к первому и второму входам блока 18 освещения навигационной обстановки. Третий и четвертый входы блока 18 соединены с первым и вторым выходами блока 7 компенсации интегральных погрешностей базового модуля 10, выход блока 18 соединен с четвертым входом блока 15 и девятым входом системы 19, первый, второй, третий и четвертый выходы блока 9 компенсации физифческих погрешностей базового модуля 10 соединены соответственно с первым, вторым, третьим и четвертым входами системы 19 автоматического управления объектом и с первым, вторым, третьим и четвертым входами блока 20 определения инерционных сил. Пятый и шестой входы системы 19 соединены соответственно с первым и вторым выходами блока 7 компенсации интегральных погрешностей базового модуля 10, с пятым и шестым входами блока 15 индикаторов и с первым и вторым входами блока 17 навигационной связи. Третий вход блока 17 является входом комплексной системы, а третий выход блока 17 является ее выходом. Выход блока 20 соединен с первым входом блока 22. Выход блока 21 соединен с вторым входом блока 22 определения возмущающих сил, выход блока 22 подключен к седьмому входу системы 19. Выход системы 19 соединен с входом блока 24 органов управления. Выход блока 24 соединен с входом блока 23 датчиков органов управления. Выход блока 23 датчиков осединен с входом блока 21 и с восьмым входом системы 19.
Комплексная система навигации, связи, освещения обстановки, управления и контроля работает следующим образом.
Система содержит базовый модуль 10, устанавливаемый в наименее возмущаемом месте судна, и n дополнительных модулей, которые устанавливаются в различных точках объектов.
Рассмотрим работу комплексной системы, имея в виду некоторый i-й модуль (любой из n дополнительных модулей).
Базовый инерциально-спутниковый модуль 10 имеет на выходе следующие сигналы:
на первом и втором выходах блока 7 компенсации интегральных погрешностей вырабатываются сигналы, пропорциональные координатам и составляющим вектора скорости объекта;
на первом, втором, третьем и четвертом выходах блока 9 компенсации физических погрешностей вырабатываются сигналы, пропорциональные углам рысканья и качки судна, угловым скоростям и ускорениям и составляющим вектора линейного ускорения судна;
на первом выходе приемоиндикатора 1 спутниковой навигационной системы вырабатываются сигналы, содержащие информацию о фазе несущей принимаемого сигнала от искусственного спутника Земли.
Блок 9i i-го инерциально-спутникового модуля 12 вырабатывает значения угловых параметров движения судна в точках установки i-го модуля 12, которые подаются на вход блока 14i определения угловых деформаций судна. В блоках сравнения, входящих в состав блока 14i, производится вычитание сигналов углового положения судна по каждому из углов θ, Ψ, γ, выработанных блоками 9 и 9i базового и i-го инерциально-спутниковых модулей. Значения разностей определяют деформации судна и поступают на блок 15 индикаторов для информации судоводителю о степени безопасности судна при выполнении маневров, а также при воздействии внешних возмущений (ветровых и волновых). Одновременно значения разностей поступают на блок 16 регистрации для сбора статистической информации о деформируемости корпуса судна с целью обеспечения оптимальных запасов прочности в строящихся судах данной серии. Линейные деформации корпуса судна в точке установки i-го модуля определяются в составе блока 13. В нем вырабатывается разность фаз поступающих от спутника входящих сигналов по несущей частоте и принятых приемоиндикатором 1 базового модуля и приемоиндикатором 1 i-го модуля.
Измерение линейной деформации приозводится по формуле
Δui(t)= Aнcos , (8) где ΔUi измеряемая разность выходных фазовых сигналов приемоиндикатора 1i i-го модуля и базового модуля;
, (8) где ΔUi измеряемая разность выходных фазовых сигналов приемоиндикатора 1i i-го модуля и базового модуля;
с скорость света;
Ан амплитуда несущей сигнала;
ΔDi измеряемое с учетом линейной деформации расстояние между точками установки i-го и базового модулей на корпусе судна.
Значения сигналов ΔDi поступают на входы блока 15 для информации судоводителю и на входы блока 16 для их регистрации.
В экстремальных условиях, например при шторме, судоводитель использует поступившую к нему информацию о текущих деформациях корпуса судна с целью безопасного управления судна. Например, судоводитель может уменьшить скорость судна при шторме, оперативно поворачивать корпус судна "носом к волне" с учетом того, что направление волн изменяется и т.д.
В предлагаемом изобретении реализуется не только принцип управления подвижным объектом "по отклонению", но и принцип управления подвижным объектом "по возмущению".
Для этого призводится косвенное измерение текущих значений возмущающих сил и моментов (гидродинамических, аэродинамических), действующих на корпус подвижного объекта.
Косвенное измерение возмущающих сил и моментов основывается на том, что их можно определить как разность инерционных и управляющих сил и моментов.
Инерционные силы и моменты определяются в блоке 20 по выходным сигналам базового модуля 10, причем определяются в связанной с корпусом подвижного объекта системе координат, начало которой совмещено с точкой установки базового модуля на корпусе управляемого подвижного объекта.
Составляющие в ситеме координат Oxyz главного вектора  инерционных сил имеют следующие выражения:
инерционных сил имеют следующие выражения:
Fиx MWx, Fиy MWy, Fz MWz (9) где М масса подвижного объекта (с учетом присоединенной массы воды для судна);
Wx, Wy, Wz составляющие вектора абсолютного линейного ускорения точки 0 по осям трехгранника Oxyz.
Составляющие в системе координат Oxyz главного момента Lиинерционных сил относительно точки 0 имеют следующие выражения:
Lих (Ixωx-Ixyωy-Ixzωz)+ωy(-Ixzωx-Iyzωy+Izωz)-
(Ixωx-Ixyωy-Ixzωz)+ωy(-Ixzωx-Iyzωy+Izωz)-
-ωz(-Ixyωx+Iyωy-Iyzωz)+M(Wylz-Wzly);
Lиy (-Ixyωx+Iyωy-Iyzωz)+ωz(Ixωx-Iyωy-Ixzωz)-
(-Ixyωx+Iyωy-Iyzωz)+ωz(Ixωx-Iyωy-Ixzωz)-
-ωx(-Ixzωx-Iyzωy+Izωz)+M(Wzlx-Wxlz); (10)
Lиz (-Ixzωx-Iyzωy+Izωz)+ωx(-Ixyωx+Iyωy-Iyzωz)-
(-Ixzωx-Iyzωy+Izωz)+ωx(-Ixyωx+Iyωy-Iyzωz)-
-ωy(Ixωx-Ixyωy-Ixzωz)+M(Wxly-Wylx), где ix, iy, iz, ixy, ixz, iyz моменты инерции и центробежные моменты инерции корпуса подвижного объекта в системе координат Oxyz;
lx, ly, lz составляющие вектора  , проведенного из точки 0 к центру масс корпуса подвижного объекта;
, проведенного из точки 0 к центру масс корпуса подвижного объекта;
ωx, ωy, ωz проекции на оси трехгранника Oxyz вектора  абсолютной угловой скорости вращения корпуса объекта;
абсолютной угловой скорости вращения корпуса объекта;
Wx, Wy, Wz проекции на оси трехгранника Oxyz вектора  абсолютного ускорения тoчки 0.
абсолютного ускорения тoчки 0.
В частном случае из выражений (9) и (10) инерционных сил и моментов можно получить упрощенные их выражения.
Управляющие силы и моменты, действующие на подвижный объект, определяются в блоке 21 по выходным сигналам блока 23 датчиков органов управления подвижным объектом. Эти датчики измеряют текущее положение К органов управления
UK (K 1, 2.K) (11)
Органами управления морского судна, например, являются кормовой руль, носовое подруливающее устройство, винт постоянного шага (производится уравление угловой скоростью вращения винта), винт регулируемого шага (производится управление поворотом лопастей винта), выдвижные боковые рули успокоителя качки и др.
Для каждого управления Uк могут быть рассчитаны в системе координат Oxyz управляющие силы и управляющие моменты по формулам
fykx Ckx Uk, fyky CkyUk, fykz CkzUk; (12)
Lykx lky fkyz lkz fyky, Lyky lkz fykx lkx fykz,
Lykz lkx fyky lky fykz, (13) где Сkx, Cky, Ckz коэффициенты каждой управляющей силы (гидродинамические коэффициенты и др.), которые являются известными функциями скорости других параметров движения объекта;
lkx, lky, lkz координаты точки приложения К-й управляющей силы в связанной системе координат Oxyz.
С учетом формул (11) и (12) составляющие главного вектора управляющих сил  по осям системы координат Oxyz имеют следующие выражения:
по осям системы координат Oxyz имеют следующие выражения:
Fуx Ckxuk, Fуy
Ckxuk, Fуy Ckyuk, Fуz
Ckyuk, Fуz Ckzuk. (14)
Ckzuk. (14)
С учетом выражений (11), (12) и (13) составляющие главного момента управляющих по осям системы координат имеют следующие выражения:
Lуx Lуkx
Lуkx (lkyCkz-lkzCky)uk,
(lkyCkz-lkzCky)uk,
Lуy Lуky
Lуky (lkzCkx-lkxCkz)uk, (15) Lуz
(lkzCkx-lkxCkz)uk, (15) Lуz Lуkz
Lуkz (lkxCky-lkyCkx)uk, Возмущающие силы и моменты, действующие на подвижный объект, определяются в блоке 22 по выходным сигналам блока 20 определения инерционных сил и блока 21 определения управляющих сил, основываясь на следующих очевидных векторных уравнениях:
(lkxCky-lkyCkx)uk, Возмущающие силы и моменты, действующие на подвижный объект, определяются в блоке 22 по выходным сигналам блока 20 определения инерционных сил и блока 21 определения управляющих сил, основываясь на следующих очевидных векторных уравнениях: +
+ +
+ =0, (16)
=0, (16) +
+ +
+ = 0, (17) где
= 0, (17) где  главный вектор волзмущающих сил, действующих на подвижный объект;
главный вектор волзмущающих сил, действующих на подвижный объект; главный вектор момента возмущающих сил относительно точки 0.
главный вектор момента возмущающих сил относительно точки 0.
Из векторных уравнений (16) и (17) в проекциях на оси системы координат Oxyz получаем
Fвх -(Fих + Fyx), Fвy -(Fиy + Fyy),
Fвz -(Fиz + Fyz) (18)
Lвx -(Lиx + Lyx), Lвy -(Lиy + Lyy),
Lвz -(Lиz + Lyz) (19)
Эти формулы реализуются в блоке 22, с выхода которого шесть сигналов
Fвх, Fвy, Fвz, Lвх, Lвy, Lвz (20) поступают на седьмой вход системы 19 управления.
В системе 19 производится формирование законов управления судном с учетом сигналов возмущающих воздействий, выработанных блоком 22, сигналов параметров движения судна, выработанных базовым модулем 10, и сигналов фактического положения органов управления, выработанных блоком 23.
Управление подвижным объектом с учетом возмущающих сил и моментов обеспечивает инвариантность судна к внешним возмущениям, что повышает мореходность судна и создает комфортные условия для экипажа.
Предлагаемая комплексная система позволяет также повысить безопасность судовождения благодаря обеспечению возможности определять относительные координаты подвижных объектов, находящихся в заданной ограниченной зоне, а также их производные. В настоящее время относительные координаты (дальность, пеленг) измеряются на судах посредством радиолокатора, который является средством освещения обстановки. В данной комплексной системе предлагается независимо от радиолокатора определять относительные координаты подвижных объектов, в том числе дальность и пеленг, путем получения по каналам навигационной связи абсолютных координат места подвижных объектов и их сравнения с абсолютными координатами места своего подвижного объекта. Вычисления относительных координат и их производных производится в блоке 18 освещения навигационной обстановки, на третий и четвертый входы которого подаются соответственно сигналы текущих координат и составляющих скорости подвижного объекта, а на первый и второй входы подаются соответственно сигналы координат и составляющих скорости другого подвижного объекта, переданные из блока 17 навигационной связи. На первый и второй входы блока 17 поступают сигналы координат и их производных нашего объекта для передачи в эфир и выработки относительных параметров другими подвижными объоектами.
Относительные линейные координаты и составляющие скорости
▿Xν, ▿Yν, ▿Zν (ν=1,2.N); (21) Xν,
Xν,  Yν,
Yν,  Zν (ν=1,2.N) (22) ν-го подвижного объекта по отношению к нашему подвижному объекту определяются по формулам
Zν (ν=1,2.N) (22) ν-го подвижного объекта по отношению к нашему подвижному объекту определяются по формулам
▿Xν=Xν-X, ▿Yν=Yν-Y, ▿Zν=Zν-Z (ν=1,2.N); (23) Xν=
Xν=  -
- ,
,  Yν=
Yν=  -
- ,
,  Z=
Z= -
- (ν=1,2.N), (24) где абсолютные координаты ν-го подвижного объекта
(ν=1,2.N), (24) где абсолютные координаты ν-го подвижного объекта , Yν, Zν (ν=1,2.N) (25) и составляющие абсолютной скорости ν-го подвижного объекта
, Yν, Zν (ν=1,2.N) (25) и составляющие абсолютной скорости ν-го подвижного объекта ,
,  ,
,  (ν=1,2.N) (26) передаются по каналам связи, например по каналам радиосвязи, через спутник связи космической системы "Инморсат".
(ν=1,2.N) (26) передаются по каналам связи, например по каналам радиосвязи, через спутник связи космической системы "Инморсат".
Дальность ν-го подвижного объекта, а также угловые координаты на этот объект определяются в блоке 18 по следующим формулам:
Dν=(▿X
Пν=arcsin  , (27)
, (27)
εν=arcsin  .
.
Таким образом, предлагаемая комплексная система навигации, связи, освещения обстановки, управления и контроля обеспечивает повышение безопасности судовождения, улучшение мореходности судна и контроля его прочностных характеристик на базе получаемой от инерциально-спутниковых модулей точной, достоверной и наиболее полной информации о движении и состоянии судна, обработанной вновь введенными блоками по собственным алгоритмам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2015 |
|
RU2633703C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2462690C1 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2536768C1 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2439498C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ВЫСТАВКИ ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 1993 |
|
RU2062990C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА С КОМБИНИРОВАННЫМ ИСПОЛЬЗОВАНИЕМ СПУТНИКОВЫХ ДАННЫХ | 2007 |
|
RU2334199C1 |
Изобретение относится к навигации преимущественно морских судов и может быть применено для определения более чем одной навигационной величины с использованием средств космической навигации. Техническим результатом является повышение достоверности и точности выработки навигационных параметров, осуществляемой инерциально-спутниковым модулем, а также повышение достоверности вычислений, что позволило бы на базе получаемой более полной и точной информации о векторе состояния судна повысить безопасность судовождения, улучшить мореходность судна и контролировать его прочностные характеристики. Это достигается тем, что в инерциально-спутниковом модуле определяются девять интегральных параметров по каждой из погрешностей по трем координатам и трем проекциям линейной скорости в блоке определения интегральных погрешностей, на основе которых в блоке определения физичечских погрешностей определяются физические погрешности, которые затем компенсируются в навигационных параметрах, определяемых на основе показаний блока инерциальных датчиков. За счет размещения на корпусе объекта инерциально-спутниковых модулей появляется возможность определить линейные и угловые деформации объекта в блоках 13 определения линейных деформаций и блоках 14 определения угловых деформаций. По информации с базового инерциально-спутникового модуля 10 определяется положение объекта относительно ν-х объектов в блоке 18 освещения навигационной обстановки. Информация о текущих деформациях судна, поступающая на блок 16 регистрации, используется судоводителем. С выхода блока 17 навигационной связи информация о координатах и их производных объекта передается в эфир для выработки относительных параметров любым из других объектов. 2 с.п. ф-лы, 2 ил.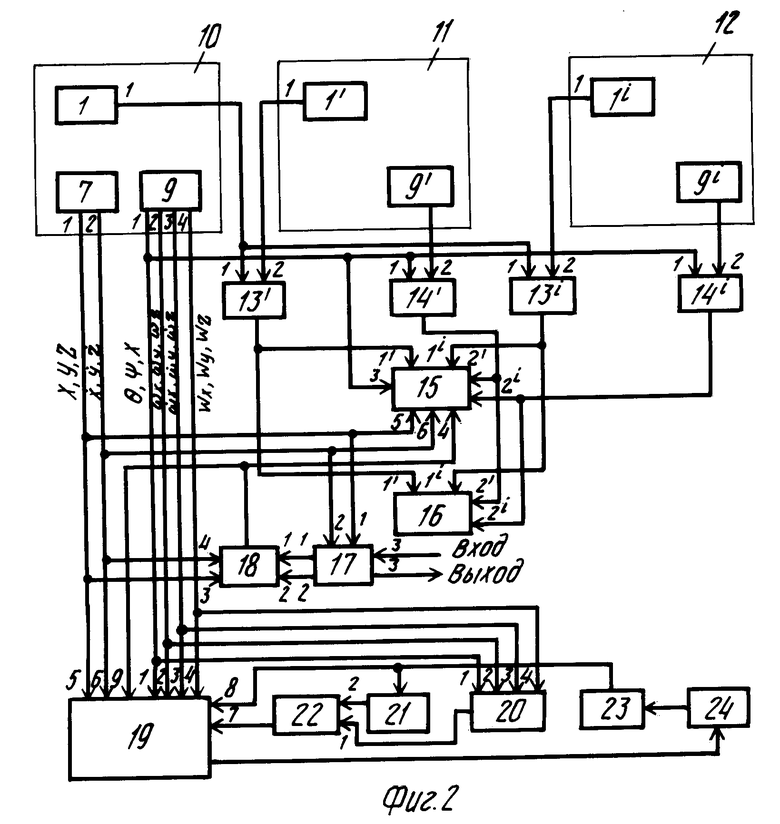
| Радиоэлектроника за рубежом, 1989, N 1, с.86-89. |
