Изобретение относится к специализированным устройствам вычислительной техники и может быть использовано для оценки характеристик зоны поиска и сопровождения связных космических аппаратов при организации связи с наземными станциями.
Известно устройство, содержащее блоки памяти, коммутатор, дешифратор, блок подсчета массивов, элементы И, блок элементов ИЛИ, буферный блок памяти, входной блок памяти и две группы элементов И [авторское свидетельство СССР №1835543, кл. G 06 f 15/20, 1990].
Недостатком известного устройства является его относительно узкие функциональные возможности.
Наиболее близким по технической сущности к предлагаемому является устройство, содержащее последовательно соединенные генератор тактовых импульсов, счетчик тактовых импульсов и регистр, а также датчик случайных чисел, логарифмический преобразователь, делители, элементы задержки, формирователи функции расхода ресурса, элемент ИЛИ, сумматор, блоки сравнения, умножитель, формирователь импульсов, задатчики уровня и элементы И с соответствующими связями [патент РФ №2015547, кл. G 06 f 15/20,1991].
Недостатком наиболее близкого технического решения является его относительно узкие функциональные возможности, не позволяющие использовать его для оценки характеристик зоны поиска и сопровождения космических аппаратов при связи с наземными станциями.
Требуемый технический результат заключается в расширении функциональных возможностей.
Требуемый технический результат достигается тем, что в устройство для оценки характеристик зоны начального поиска связных космических аппаратов, содержащее генератор тактовых импульсов и счетчик тактовых импульсов, а также первый блок датчиков случайных чисел, введены второй, третий и четвертый блоки датчиков случайных чисел, блок формирования реального орбитального положения космического аппарата, первый вход которого соединен с выходом первого блока датчиков случайных чисел, блок формирования реальной географической привязки станции, первый вход которого соединен с выходом второго блока датчиков случайных чисел, блок формирования реальной ориентации бортовой антенны, первый вход которого соединен с выходом третьего блока датчиков случайных чисел, блок формирования реальной ориентации наземной антенны, первый вход которого соединен с выходом четвертого блока датчиков случайных чисел, одновибратор, вход включения которого является входом запуска устройства для оценки характеристик зоны начального поиска связных космических аппаратов, а выход - соединен с входом запуска генератора тактовых импульсов, датчик прогноза орбитального положения космического аппарата, вход которого соединен с информационным выходом счетчика тактовых импульсов, а выход - соединен со вторым входом блока формирования реального орбитального положения космического аппарата, датчик географической привязки станции, выход которого соединен со вторым входом блока формирования реальной географической привязки станции, блок расчета пространственной ориентации бортовой антенны, первый и второй входы которого соединены с выходами, соответственно, датчика прогноза орбитального положения космического аппарата и датчика географической привязки станции, а выход - соединен со вторым входом блока формирования реальной ориентации бортовой антенны, блок расчета пространственной ориентации наземной антенны, первый и второй входы которого соединены с выходами, соответственно, датчика прогноза орбитального положения космического аппарата и датчика географической привязки станции, а выход - соединен со вторым входом блока формирования реальной ориентации наземной антенны, блок расчета линии визирования “космический аппарат-станция”, первый и второй входы которого соединены с выходами, соответственно, блока формирования реального орбитального положения космического аппарата и блока формирования реальной географической привязки станции, блок расчета промаха наведения бортовой антенны, первый и второй входы которого соединены с выходами, соответственно, блока расчета линии визирования “космический аппарат-станция” и блока формирования реальной ориентации бортовой антенны, блок расчета промаха наведения наземной антенны, первый и второй входы которого соединены с выходами, соответственно, блока расчета линии визирования “космический аппарат-станция” и блока формирования реальной ориентации наземной антенны, блок расчета коэффициента ослабления, первый и второй входы которого соединены с выходами, соответственно, блока расчета промаха наведения бортовой антенны и блока расчета промаха наведения наземной антенны, а также блок формирования гистограммы распределения, первый вход которого соединен с выходом блока расчета коэффициента ослабления, второй, третий и четвертый входы соединены, соответственно, с выходом генератора тактовых импульсов, с выходом переполнения счетчика тактовых импульсов и с выходом одновибратора, а выход является выходом устройства для оценки характеристик зоны начального поиска связных космических аппаратов, при этом, выход переполнения счетчика тактовых импульсов соединен с входом останова генератора тактовых импульсов.
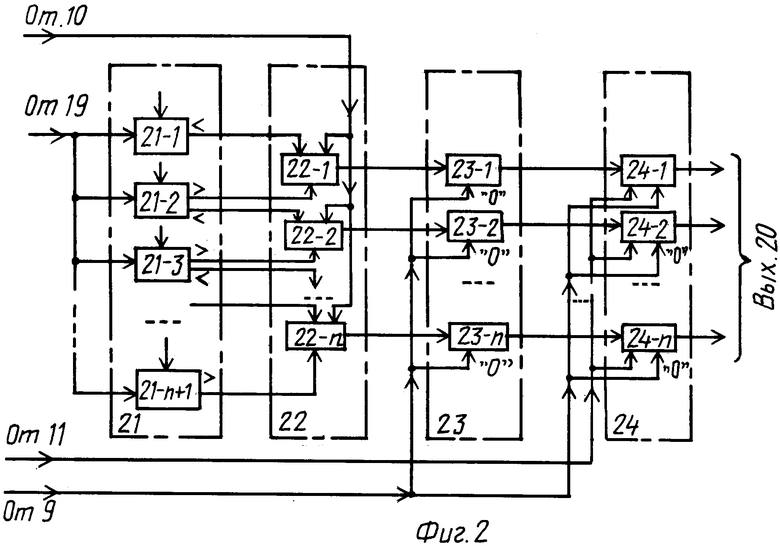
Кроме того, требуемый технический результат достигается тем, что блок формирования гистограммы распределения содержит группу из (n+1) блоков сравнения, первые входы которых объединены и являются первым входом блока формирования гистограммы распределения, вторые входы являются входами задания границ интервалов распределения, a n - число интервалов распределения, блок из n элементов И, первый и второй вход каждого из которых соединен с выходом, соответственно, одноименного и последующего блоков сравнения группы блоков сравнения, третьи входы объединены и являются вторым входом блока формирования гистограммы распределения, блок из n счетчиков импульсов, счетные входы каждого из которых соединены с выходами одноименных элементов И блока элементов И, а входы установки в ноль объединены и являются четвертым входом блока формирования гистограммы распределения, а также блок из n регистров памяти, информационные входы каждого из которых соединены с выходами одноименных счетчиков импульсов блока счетчиков импульсов, входы управления записью объединены и являются третьим входом блока формирования гистограммы распределения, а входы установки в ноль объединены с входами установки в ноль счетчиков импульсов блока счетчиков импульсов.
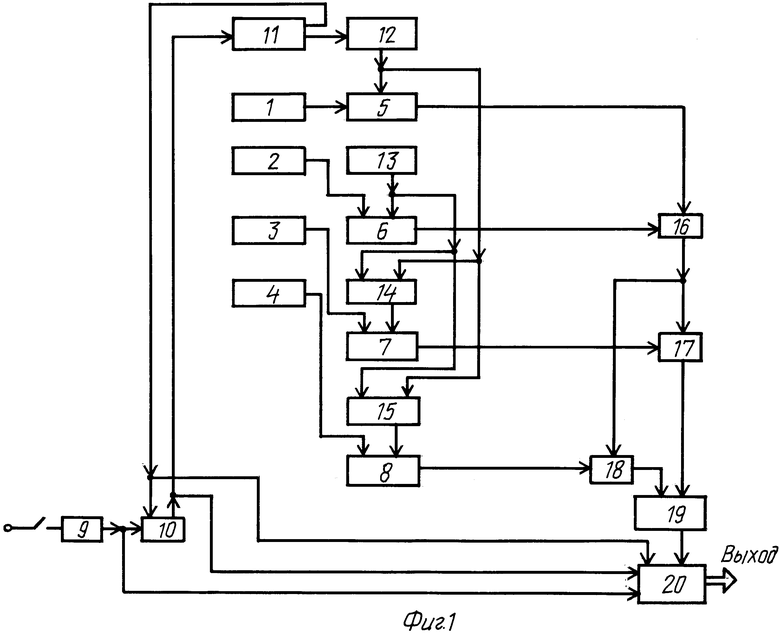
На фиг.1 представлена электрическая структурная схема устройства для оценки характеристик зоны начального поиска связных космических аппаратов, на фиг.2 - блока формирования гистограммы распределения, на фиг.3 - схема процесса поиска и сопровождения.
Устройство (фиг.1) устройства для оценки характеристик зоны начального поиска связных космических аппаратов (КА) содержит первый 1, второй 2, третий 3 и четвертый 4 блоки датчиков случайных чисел, блок 5 формирования реального орбитального положения КА, первый вход которого соединен с выходом первого блока 1 датчиков случайных чисел, блок 6 формирования реальной географической привязки станции, первый вход которого соединен с выходом второго блока 2 датчиков случайных чисел, блок 7 формирования реальной ориентации бортовой антенны, первый вход которого соединен с выходом третьего блока 3 датчиков случайных чисел, блок 8 формирования реальной ориентации наземной антенны, первый вход которого соединен с выходом четвертого блока 1 датчиков случайных чисел, одновибратор 9, вход включения которого является входом запуска устройства для оценки характеристик зоны начального поиска связных космических аппаратов, генератор 10 тактовых импульсов (ГТИ), вход запуска которого соединен с выходом одновибратора 9, счетчик 11 тактовых импульсов, счетный вход которого соединен с выходом ГТИ 10, а выход переполнения соединен с входом останова ГТИ 10, а также датчик 12 прогноза орбитального положения КА, вход которого соединен с информационным выходом счетчика 11, а выход - соединен со вторым входом блока 5 формирования реального орбитального положения КА.
Устройство (фиг.1) для оценки характеристик зоны начального поиска связных космических аппаратов (КА) содержит также датчик 13 географической привязки станции, выход которого соединен со вторым входом блока 6 формирования реальной географической привязки станции, блок 14 расчета пространственной ориентации бортовой антенны, первый и второй входы которого соединены с выходами, соответственно, датчика 12 и датчика 13, а выход - соединен со вторым входом блока 7 формирования реальной ориентации бортовой антенны, а также блок 15 расчета пространственной ориентации наземной антенны, первый и второй входы которого соединены с выходами, соответственно, датчика 12 и датчика 13, а выход - соединен со вторым входом блока 8 формирования реальной ориентации наземной антенны.
Устройство (фиг.1) устройства для оценки характеристик зоны начального поиска связных космических аппаратов (КА) дополнительно содержит блок 16 расчета линии визирования “космический аппарат-станция”, первый и второй входы которого соединены с выходами, соответственно, блока 5 формирования реального орбитального положения космического аппарата и блока 6 формирования реальной географической привязки станции, блок 17 расчета промаха наведения бортовой антенны, первый и второй входы которого соединены с выходами, соответственно, блока 16 расчета линии визирования “космический аппарат-станция” и блока 7 формирования реальной ориентации бортовой антенны, блок 18 расчета промаха наведения наземной антенны, первый и второй входы которого соединены с выходами, соответственно, блока 16 расчета линии визирования “космический аппарат-станция” и блока 8 формирования реальной ориентации наземной антенны, блок 19 расчета коэффициента ослабления, первый и второй входы которого соединены с выходами, соответственно, блока 17 расчета промаха наведения бортовой антенны и блока 18 расчета промаха наведения наземной антенны, а также блок 20 формирования гистограммы распределения, первый вход которого соединен с выходом блока 19 расчета коэффициента ослабления, второй, третий и четвертый входы - соединены, соответственно, с выходом генератора 10 тактовых импульсов, с выходом переполнения счетчика 11 тактовых импульсов и с выходом одновибратора 9, а выход - является выходом устройства для оценки характеристик зоны начального поиска связных космических аппаратов, при этом, выход переполнения счетчика 11 тактовых импульсов соединен с входом останова генератора 10 тактовых импульсов.
Блок 20 формирования гистограммы распределения (фиг.2) содержит группу 21 блоков сравнения 21-1...21-(n+1), первые входы которых объединены и являются первым входом блока 20 формирования гистограммы распределения, вторые входы являются входами задания границ интервалов распределения, a n - число интервалов распределения, блок 22 элементов И 22-1...22-n, первый и второй входы каждого из которых 22-i (i=1, n) соединены с выходом, соответственно, одноименного 21-i и последующего 21-(i+1) блоков сравнения группы 21, третьи входы объединены и являются вторым входом блока 20 формирования гистограммы распределения, блок 23 счетчиков 23-1...23-n импульсов, счетные входы которых соединены с выходами одноименных элементов И блока элементов И, а входы установки в ноль объединены и являются четвертым входом блока 20 формирования гистограммы распределения, а также блок 24 регистров памяти 24-1...24-n, информационные входы которых соединены с выходами одноименных счетчиков импульсов блока 23, входы управления записью объединены и являются третьим входом блока 20 формирования гистограммы распределения, а входы установки в ноль объединены с входами установки в ноль счетчиков импульсов блока 23 счетчиков.
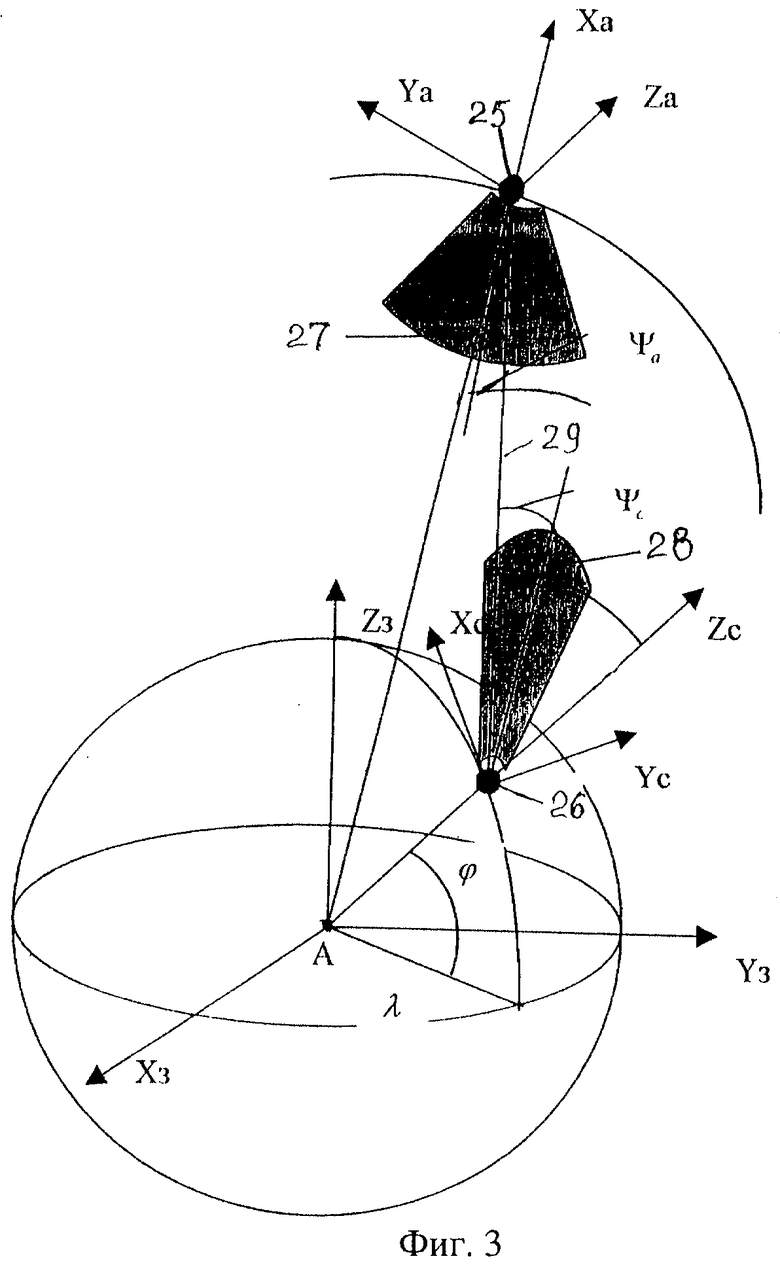
На схеме процесса поиска и сопровождения (фиг.3) представлены реальное положение 25 космического аппарата, реальное положение 26 наземной станции, диаграмма 27 направленности бортовой антенны, диаграмма 28 направленности наземной антенны, реальное положение 29 линии визирования “космический аппарат-станция”, а также системы координат и параметры привязки КА и наземной станции к соответствующим координатным осям.
Работает устройство устройства для оценки характеристик зоны начального поиска связных космических аппаратов (КА) следующим образом.
Предварительно проведем теоретическое обоснование его работы.
Известные сложности установления и поддержания связи наземных станций с подвижными объектами в космических радиолиниях дополняются рядом специфических факторов детерминированного и случайного характера (вращение Земли, неопределенность пространственного положения КА, неточности ориентирования бортовых и наземных антенн и т.п.), обусловливающих неопределенность пространственного положения КА относительно наземной станции. В итоге положение КА в момент начала сеанса связи и в процессе его проведения является случайным.
Зона неопределенности пространственного положения КА формируется суммарным воздействием комплекса факторов неопределенности, основными из которых являются:
неопределенность, обусловленная неточностью прогнозирования орбитального движения КА;
неопределенность географической “привязки” наземной станции;
неопределенность ориентации наземной антенны;
неопределенность ориентации бортовой антенны.
Характеристики указанных неопределенностей описываются известными законами распределения соответствующих случайных величин и являются исходными данными для оценки параметров отклонения реальной линии визирования бортовой и наземной антенн от ее расчетного положения в процессе сеанса связи.
Принятая модель пространственной ориентации КА относительно наземной станции с учетом пространственной ориентации наземной и бортовой антенн и их диаграмм направленности, позволяющая получить формулы для расчета энергетических соотношений на входе приемного устройства станции и оценить устойчивость и надежность связи, поясняются фиг.3, где используются следующие обозначения:
А, Хз, Yз, Zз - геоцентрическая система координат;
25, 26 - космический аппарат и наземная станция, соответственно;
27, 28 - диаграммы направленности бортовой и наземной антенн, соответственно, центральные оси которых определяют их выставленные линии визирования;
29 - реальная линия визирования “КА - станция”;
Ψа, Ψc - углы отклонения выставленных линий визирования бортовой и наземной антенн, соответственно, от реальной линии визирования “КА - станция”;
Ха, Ya, Za - орбитальная система координат;
Хс, Yc, Zc - станционная система координат.
При обосновании математической модели использовались следующие допущения относительно источников неопределенности начального положения линии визирования “КА - станция”:
ошибки определения положения КА и станции в геоцентрической системе координат;
ошибки наведения бортовой антенны в орбитальной системе координат;
ошибки наведения наземной антенны в станционной системе координат.
Кроме того, полагалось, что орбитальная плоскость КА проходит через точку расположения наземной станции, а диаграммы направленности бортовой и наземной антенн полагались осесимметричными и для их описания использовалась аппроксимация вида

где Z=(2π/λ)RsinΨ; R - радиус зеркала; Ψ - угол отклонения линии наблюдения от направления максимума диаграммы направленности.
Энергетические соотношения на входе приемного устройства станции при совпадении максимумов диаграмм направленности бортовой и наземной антенн определялись отношением сигнал/шум в виде

а вдоль реальной линии визирования “КА - станция” - в виде

где Рпер - мощность бортового передатчика, Gпер, Gпp - коэффициенты усиления бортовой и наземной антенн; Рш.эф - эффективная мощность шумов на входе приемного устройства; LΣ - ослабление сигнала на трассе радиолинии; XΣ=XΣ(Ψa,Ψc) - коэффициент ослабления сигнала за счет несовпадения максимумов диаграмм направленности бортовой и наземной антенн.
В расчетах принято допущение, что ошибки определения положения КА и станции подчинены нормальному закону с известными характеристиками. При этом считается, что положение КА рассчитывается в орбитальной подвижной системе координат и допустимые погрешности прогнозирования положения КА при долговременном планировании зависят от интервала прогноза.
В предложенном устройстве для исследований процесса поиска, наведения и сопровождения КА в процессе сеанса связи с наземной станцией использован метод статистического моделирования.
Описанный подход к исследованию указанного процесса реализуется следующим образом.
В общем случае, при описании процесса поиска в трехмерном пространстве (фиг.3) каждый из блоков 1-4 может быть выполнен в виде трех отдельных датчиков случайных чисел с нормальным распределением, входы опроса которых объединены и являются входом соответствующего блока, а выходы - образуют выход соответствующего блока. Каждый из датчиков предназначен для ввода случайной поправки в соответствующую пространственную координату, описывающую орбитальное положение КА, географическую привязку станции или результаты расчета пространственной ориентации бортовой или наземной антенны. Датчика 12-13 могут быть выполнены в виде ПЗУ, блоки 5-8 - в виде трех параллельно работающих по соответствующим координатам сумматоров, блоки 14-19 - в виде ПЗУ. Информация о работе устройств, представленная ниже, является достаточной для программирования ПЗУ.
Перед запуском устройства счетчик 11 устанавливается в требуемое начальное положение, соответствующее, например, условному времени нахождения КА на орбите в заданной точке пространства. Запуск устройства начинается с подачи питания на вход одновибратора 9, по выработанному импульсу которого производится запуск ГТИ 10, а также обнуление в блоке 20 формирования гистограмм распределения счетчиков блока 23 и регистров блока 24. Счетчик 11 тактовых импульсов производит формирование текущего времени (временных отсчетов) t исследований (нахождения КА на орбите). По этим временным отсчетам датчик 12 производит формирование трех координат Xa(t), Ya(t), Za(t), описывающих прогнозное (расчетное) положение КА на орбите. Реально указанные сведения задаются средствами внешнетраекторых измерений (в частном случае, при оценке зоны поиска при вхождении в связь эти координаты являются константами, определяющими пространственное положение КА в трехмерной системе координат). Синхронно с формированием отсчетов по импульсу опроса меняется состояние выходов датчиков случайных чисел, входящих в состав блока 1. В результате на выходе блока 5 последовательно во времени формируются три координаты, соответствующие реальному орбитальному положению КА. На выходе датчика 13 постоянно формируется три координаты Xc(t), Yc(t), Zc(t), описывающие географическую привязку наземной станции. Эта информация может быть получена по результатам геодезических измерений. Следовательно, при аналогичном (описанном выше) изменении состояния выходов датчиков случайных чисел, входящих в состав блока 2, на выходе блока 6 последовательно во времени формируются три координаты, соответствующие реальному географическому положению наземной станции. По сигналам с выходов датчика 12 и датчика 13 в блоке 14 формируется информация о пространственной ориентации диаграммы направленности бортовой антенны. Расчеты в этом блоке могут быть проведены с использованием стандартных соотношений аналитической геометрии, позволяющих определить в пространстве угловое направление прямой, проходящей через прогнозируемую точку орбитального положения КА, формируемую в виде трех координат на выходе датчика 12, и точку географической привязки наземной станции, формируемую в виде трех координат на выходе датчика 13. Датчики блока 3 формируют случайные поправки, которые изменяют координаты, сформированные в блоке 14, что позволяет сформировать на выходе блока 7 угловые координаты, характеризующие реальную ориентацию бортовой антенны. Аналогично по сигналам, сформированным датчиками 12 и 13, в блоке 15 определяется расчетная пространственная ориентация антенны наземной станции, а на выходе блока 8 - ее реальная ориентация. В блоке 16 по трем координатам, сформированным блоком 5 и определяющим реальное орбитальное положение КА, а также трем координатам, сформированным блоком 6 и определяющим реальное положение наземной станции, производится расчет реальной линии 29 визирования “КА - станция”. Для расчета также могут быть использованы стандартные соотношения аналитической геометрии, позволяющие определить в пространстве угловое направление прямой, проходящей через реальную точку орбитального положения КА и точку реальной географической привязки наземной станции. По сигналам, формируемым на выходе блока 7 и на выходе блока 16, в блоке 17 производится расчет угла Ψа, характеризующего отклонение (промах) направления ориентации бортовой антенны относительно линии визирования “КА - станция”, а по сигналам с выходов блока 8 и 16 - расчет угла Ψс отклонения (промаха) направления ориентации наземной антенны относительно линии визирования “КА - станция”. На фиг.3 эти отклонения указаны в виде соответствующих углов Ψa и Ψс для случая проекции соответствующих прямых на орбитальную плоскость, проходящую через точку размещения наземной станции. Для расчета указанных промахов также могут быть использованы стандартные соотношения аналитической геометрии.
Оценка промахов, проведенная в блоках 17 и 18, позволяет произвести величину коэффициента ослабления, которая, в частном случае, определяется произведением двух соотношений (1), рассчитанных для угла Ψс и угла Ψа.
Формируемый на выходе блока 19 поток возможных значений случайной величины, характеризующей коэффициент затухания, поступает на вход блока 20 формирования гистограммы распределения. В этом блоке каждый текущий сигнал с выхода блока 19 сравнивается с пороговыми уровнями блоков 21-i, каждый из которых соответствует границам частных интервалов разбиения общего интервала (0-1) возможных значений коэффициента затухания. Каждому конкретному значению сигнала с выхода блока 19 соответствует факт его попадания в соответствующий интервал, который фиксируется появлением тактового импульса на выходе соответствующего элемента И блока 22 с последующим изменением состояния счетчика блока 23. Содержимое счетчиков переписывается в регистры блока 24 по сигналу с выхода переполнения счетчика 11 тактовых импульсов, максимально возможное содержимое которого рассчитано на требуемое число статистических испытаний. В результате, содержимое регистров соответствует полной гистограмме распределения возможных значений коэффициента затухания. Варьируя значения параметров датчиков случайных чисел, входящих в состав блоков 1-4 и характеризующих степень влияния тех или иных случайных факторов, может быть исследовано их влияние на разброс значений коэффициента затухания, и определены, в частности, требования к точности наведения и сопровождения КА при организации сеанса связи.
Если задать постоянным или мало изменяющимся во времени сигнал на выходе датчика 12, то процесс исследований будет соответствовать режиму захвата КА - режиму вхождения в связь.
Если на информационный вход блока 20 вместо выходного сигнала блока 19 подать сигнал от блока 17 или 18, то устройство позволяет сформировать гистограмму распределения промахов наведения бортовой и наземной антенн, соответственно.
Таким образом, предложенное устройство позволяет расширить функциональные возможности известных технических решений и обеспечить исследование процесса поиска, захвата и сопровождение КА при организации связи с наземной станцией.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕВИЗИОННЫМ ВИДЕОСПЕКТРАЛЬНЫМ КОМПЛЕКСОМ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2068801C1 |
| РЕГИОНАЛЬНАЯ СИСТЕМА МОБИЛЬНОЙ СПУТНИКОВОЙ СВЯЗИ И ОБСЛУЖИВАНИЯ ТРАНСПОРТНЫХ КОРИДОРОВ | 2005 |
|
RU2322760C2 |
| Способ глобальной активно-пассивной многопозиционной спутниковой радиолокации земной поверхности и околоземного пространства и устройство для его осуществления | 2019 |
|
RU2700166C1 |
| Многофункциональный космический аппарат | 2016 |
|
RU2640167C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ И ФОРМИРОВАНИЕМ ИЗОБРАЖЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2153700C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА, ОСНАЩЕННОГО РАДИОМАЯКОМ | 2006 |
|
RU2354590C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| СПОСОБ ПРИВЯЗКИ ВЫПОЛНЕННЫХ С ОРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2712781C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ ПРИЕМО-ПЕРЕДАЮЩЕЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2021 |
|
RU2781246C1 |
| СПОСОБ ПРИВЯЗКИ ВЫПОЛНЕННЫХ С КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ЗЕМНОЙ ПОВЕРХНОСТИ | 2019 |
|
RU2711775C1 |
Применение: в специализированных устройствах вычислительной техники для исследований процесса поиска и сопровождения космических аппаратов при организации связи с наземными станциями. Технический результат – расширение функциональных возможностей за счет обеспечения возможности использования устройства для исследования процесса поиска и сопровождения космических аппаратов при связи с ними с наземных станций и построения гистограмм распределения параметров процесса поиска. Сущность изобретения: устройство содержит четыре блока датчиков случайных чисел, блок формирования реального орбитального положения космического аппарата, блок формирования реальной географической привязки станции, блок формирования реальной ориентации бортовой антенны, блок формирования реальной ориентации наземной антенны, одновибратор, генератор тактовых импульсов, счетчик тактовых импульсов, датчик прогноза орбитального положения космического аппарата, датчик географической привязки станции, блок расчета пространственной ориентации бортовой антенны, блок расчета пространственной ориентации наземной антенны, блок расчета линии визирования “космический аппарат-станция”, блок расчета промаха наведения бортовой антенны, блок расчета промаха наведения наземной антенны, блок расчета коэффициента ослабления, первый и второй входы которого соединены с выходами, соответственно, блок формирования гистограммы распределения. 1 з.п. ф-лы, 3 ил.
| УСТРОЙСТВО ДЛЯ РЕШЕНИЯ ЗАДАЧИ АНАЛИЗА ПРОДОЛЖИТЕЛЬНОСТИ ФУНКЦИОНИРОВАНИЯ СЛОЖНОГО ОБЪЕКТА | 1991 |
|
RU2015547C1 |
| Устройство для сортировки чисел | 1990 |
|
SU1835543A1 |
| US 5621646 A, 15.04.1997 | |||
| Огнетушитель | 0 |
|
SU91A1 |
| US 4837699 A, 08.06.1989. | |||

