Изобретение относится к области исследования радиолокационных характеристик объекта при использовании многочастотного импульсного зондирования и метода инверсного радиолокационного синтезирования апертуры.
Методы получения радиолокационного изображения (РЛИ) объекта основаны на цифровой обработке комплексных огибающих отраженных сигналов, измеренных в широкой полосе частот зондирующих импульсов РЛС при различных ракурсах визирования объекта.
Комплексная огибающая отраженного сигнала представляет собой комплексную форму отраженного сигнала, который перенесен на видеочастоту (на нулевую несущую частоту) и в котором произведена компенсация начальной фазы зондирующего сигнала.
При зондирующем сигнале

где:S - зондирующий сигнал;
А - амплитуда сигнала;
f - несущая частота сигнала;
ϕ0 - начальная фаза сигнала.
Комплексная огибающая отраженного сигнала есть

где:а - амплитуда отраженного сигнала,
R - расстояние от РЛС до объекта,
λ - длина волны зондирующего сигнала,
ϕотр - фаза, возникающая при отражении от объекта.
Используемая модель исследуемого объекта - совокупность локальных рассеивающих центров (Рц), у которых координаты в связанной с объектом системе отсчета и интенсивность отражения электромагнитной волны при фиксированной величине λ являются постоянными.
Известен триангуляционный способ построения двумерного РЛИ цели в РЛС сопровождения с инверсным синтезированием апертуры [1], в котором при узкополосном импульсном зондировании цели измеряют и запоминают комплексные огибающие отраженных сигналов, их подвергают одномерному преобразованию Фурье и формируют одномерный доплеровский портрет цели путем измерения доплеровской частоты i-го Рц и пересчета ее в линейное удаление Рц от линии визирования цели rΨ в направлении линии, перпендикулярной плоскости, проходящей через линию визирования и ось относительного вращения цели при ее сопровождении, величины rΨ определяют для двух ракурсов сопровождения цели, разделенных по углу визирования интервалом ΔΨ=0,5°, по данным rΨ1, rψ2, зафиксированным при углах Ψ1, Ψ2, определяют координату rd в направлении линии визирования, по координатам rΨ, rd, полученным для каждого i-го Рц, строят РЛИ цели.
Указанному способу присущи существенные недостатки:
координата rd при малых углах ΔΨ может быть определена только с большой погрешностью,
одномерный доплеровский портрет при узкополосном зондировании является ограниченно содержательным в отношении имеющихся Рц цели,
имеют место трудности при идентификации образов различных Рц, полученных в портретах при разных углах визирования цели.
Известен также способ получения трехмерного изображения объекта [2], в котором измеряют в пределах полусферы объекта  комплексный коэффициент рассеяния объекта
комплексный коэффициент рассеяния объекта  являющийся отношением комплексных амплитуд падающей и отраженной волн
являющийся отношением комплексных амплитуд падающей и отраженной волн  - волновой вектор отраженной волны,
- волновой вектор отраженной волны,  - вектор нормали к поверхности объекта), определяют объединенный коэффициент отражения
- вектор нормали к поверхности объекта), определяют объединенный коэффициент отражения

где ρ* - число, комплексно сопряженное к ρ,
и с помощью трехмерного преобразования Фурье определяют характеристическую функцию объекта

равную единице внутри поверхности объекта и нулю - вне ее, функцию  подвергают преобразованию Радона для определения трехмерного изображения объекта.
подвергают преобразованию Радона для определения трехмерного изображения объекта.
Недостатком указанного способа является необходимость получения функции  при большем числе ракурсов визирования объекта, а также высокая чувствительность к погрешностям измерения комплексного коэффициента рассеяния объекта
при большем числе ракурсов визирования объекта, а также высокая чувствительность к погрешностям измерения комплексного коэффициента рассеяния объекта 
Известен [3] способ построения двумерного радиолокационного изображения прямолинейно летящей цели при многочастотном узкополосном зондировании, основанный на излучении импульсных сигналов, приеме отраженных сигналов и накоплении их в течение рассчитываемого интервала синтезирования Тс, отличающийся тем, что несущую частоту зондирующих импульсов изменяют от импульса к импульсу по линейному закону в диапазоне частот от fo до fo+ΔF с шагом ΔF/2N, частоту повторения импульсов ТИ выбирают таковой, что величина Ти·2N на порядок меньше времени корреляции траекторных нестабильностей полета целей (составляющих 25-100 мс), накопление отраженных импульсов в объеме 2N·2N производят в 2N этапов с интервалом между этапами Тс/2N, составляют матрицу с 2N строками и 2N столбцами, элементами которой являются амплитуды и фазы отраженных сигналов, данные матрицы подвергают двумерному быстрому преобразованию Фурье, полученную двумерно-спектральную матрицу синтезированного отклика преобразуют в графическое матричное изображение цели, для чего определяют уровень первых боковых лепестков отклика наиболее интенсивного рассеивателя цели, принимают данный уровень за пороговую величину, сравнивают с ней значения двумерно-спектральной матрицы и в случае превышения порога выделяют соответствующий элемент в матричном поле 2N·2N, а совокупность всех выделенных элементов принимают за радиолокационное изображение цели.
Описанный способ взят в качестве прототипа.
Указанный способ обеспечивает получение двумерного портрета распределения Рц, характеризуемого интенсивностью отражения Рц и его координатами в радиальном rd и азимутальном rΨ направлениях. При этом координаты rd являются результатом преобразования во временную область спектра отраженного сигнала в полосе частот ΔF, размещенного в столбце (столбцах) матрицы. Отсчет величины rd производится от центра синтезирования по линии визирования.
Величина rd по существу является проекцией на линию визирования расстояния Рц до центра синтезирования, выбираемого на оси вращения объекта.
Другая координата rΨ, получающаяся в результате преобразования Фурье строки (строк) матрицы, образованной после преобразования Фурье столбцов, является расстоянием Рц до плоскости, проходящей через линию визирования и ось вращения [4].
Недостатком способа является то, что при синтезировании РЛИ расширение сектора углов поворота объекта сверх ΔΨ=10-15° (с целью повышения точности спектрального разрешения Рц) невозможно из-за того, что координаты rd, rΨ, являются переменными величинами, изменяющимися при вращении объекта. Кроме того, если к процессу формирования РЛИ подходить с позиции метода максимального правдоподобия, используемого для решения задач обнаружения или измерения параметров сигналов, то оператор синтезирования должен являться интегралом свертки комплексной огибающей отраженного сигнала Φ(q), зарегистрированной в координатах вектора q, изменяющегося в интервале Δq, и опорной (или фокусирующей) функции F(q, x),

где вектор х является совокупностью параметров, характеризующих интенсивность рассеяния и местоположения Рц.
Рассмотрение с указанной позиции способа-прототипа показывает, что он является не полностью сфокусированным. Вследствие этого, как показывает моделирование, точность оценки интенсивности рассеяния и координат Рц ухудшается по мере удаления Рц от оси вращения объекта.
Недостатком способа является также то, что при вращении по углу курса (азимута) Ψ объекта в реальных условиях возникающие из-за несовершенства поворотного устройства движения объекта по углу тангажа ν и крена γ должны быть скомпенсированы, т.к. они являются мешающими при синтезировании двумерного портрета.
Однако углы ν, γ являются полезными при оценке третьей координаты Рц - высоты.
Наличие движений объекта по тангажу и крену, а также учет того факта, что линия визирования РЛС - объект в реальных условиях на полигоне располагается под углом 2-3° к плоскости, перпендикулярной оси вращения объекта, создают предпосылки для получения в процессе синтезирования некоторого разрешения по высоте Рц, т.е. появляется возможность получения трехмерного РЛИ объекта.
Сущность предлагаемого изобретения заключается в следующем.
Способ решает задачу построения РЛИ, в котором имеет место разрешение высоты Рц (при наличии движения объекта по тангажу и крену), т.е. фактически решается задача построение трехмерного РЛИ.
При использовании предлагаемого способа обеспечивается технический результат, заключающийся в том, что информация об углах ν, γ, мешающая при получении двумерного РЛИ и подлежащая компенсации, используется для создания трехмерного РЛИ.
Кроме того, благодаря введению специальной опорной функции, осуществляющей фокусировку координат Рц, и использованию криволинейных координат fx, fy, fz, реализуется процесс синтезирования при любом (0-2π) секторе углов поворота объекта по курсу при наличии движений объекта по тангажу и крену, вследствие чего обеспечивается повышение точности оценки и разрешения координат Рц.
В предлагаемом способе оценка координат Рц производится в связанной системе отсчета, где эти координаты постоянны, и это создает дополнительные предпосылки для повышения точности оценки.
Для достижения указанного технического результата в способе получения трехмерного РЛИ, включающем излучение зондирующих импульсов с изменением несущей частоты от импульса к импульсу с шагом Δf в полосе частот ΔF, прием отраженных сигналов, измерение комплексных огибающих отраженных сигналов Φ(t) и запоминание их в течение времени синтезирования в угловом секторе ΔΨ, образование матрицы комплексных огибающих и преобразование ее с помощью быстрого двумерного преобразования Фурье в матрицу синтезированного отклика, определение величины порога по уровню первых боковых лепестков наиболее интенсивного отклика, сравнение значений элементов матрицы с порогом для выделения превышающих порог элементов матрицы, совокупность которых принимают за РЛИ объекта, измеряют углы курса Ψ(t), тангажа ν(t) и крена γ(t) связанной с объектом системы отсчета с началом в точке М на оси вращения объекта относительно земной системы отсчета, измеряют в земной системе отсчета координаты вектора  соединяющего точку М с фазовым центром антенны РЛС (точка О), преобразуют их в координаты связанной системы отсчета
соединяющего точку М с фазовым центром антенны РЛС (точка О), преобразуют их в координаты связанной системы отсчета
с помощью известной матрицы A(Ψ,ν,γ), определяющей переход из связанной в земную систему отсчета, определяют углы ориентации α, β вектора  в связанной системе отсчета
в связанной системе отсчета



производят регистрацию комплексных огибающих отраженных сигналов Φ(t) в координатах пространственных частот

при значениях f, α, β, соответствующих моментам измерения Φ, корректируют фазу измеренных значений комплексных огибающих Φ на величину  получая величины
получая величины  и их размещают в элементы матрицы Т(l, m, n), трехмерные номера которых (l, m, n) определяют по формулам
и их размещают в элементы матрицы Т(l, m, n), трехмерные номера которых (l, m, n) определяют по формулам

где int() - функция взятия целой части числа,
d - шаг элементов матрицы Т по координатам fx, fy, fz.
Матрицу Т подвергают трехмерному дискретному преобразованию Фурье

по полученной трехмерной матрице синтезированного отклика определяют трехмерное радиолокационное изображение объекта.
Из приведенной совокупности существенных признаков предлагаемого способа следует, что общими с прототипом являются признаки излучения зондирующих импульсов с изменением несущей частоты от импульса к импульсу с шагом Δf в полосе частот ΔF, приема отраженных сигналов, измерения комплексных огибающих отраженных сигналов, запоминание их в течение времени синтезирования в угловом интервале ΔΨ, образования матрицы комплексных огибающих и преобразования ее с помощью быстрого преобразования Фурье в матрицу синтезированного отклика, определения уровня первых боковых лепестков отклика наиболее интенсивного рассеивателя, определения пороговой величины, равной данному уровню, сравнения с ней значений элементов матрицы, выделения элементов матрицы по условию превышения порога, определения радиолокационного изображения в виде совокупности выделенных элементов матрицы.
Признак образования матрицы комплексных огибающих является общим с прототипом только формально. По существу же в прототипе строка матрицы заполняется значениями Φ, измеренными для зондирующих импульсов с одной и той же несущей частотой, но при разных углах визирования объекта Ψ. При этом значения углов Ψ должны изменяться равномерно (по углу или по времени) с тем, чтобы можно было применять дискретное преобразование Фурье.
В предлагаемом способе значения  размещаются в матрице в варианте двумерного РЛИ по правилу
размещаются в матрице в варианте двумерного РЛИ по правилу  При этом значения Φ, полученные при f=const и различных углах Ψ, будут размещены в элементы матрицы, расположенные по окружности, т.к.
При этом значения Φ, полученные при f=const и различных углах Ψ, будут размещены в элементы матрицы, расположенные по окружности, т.к.  Кроме того, в предлагаемом способе при измерениях Φ не требуется постоянный шаг изменения Ψ (или времени).
Кроме того, в предлагаемом способе при измерениях Φ не требуется постоянный шаг изменения Ψ (или времени).
Остальные вышеуказанные признаки предлагаемого способа являются отличительными.
Описание предлагаемого способа заключается в следующем.
Процесс синтезирования РЛИ с позиции метода максимального правдоподобия выражается интегралом свертки (1), где фокусирующая функция в соответствии с [5] есть

R0 - расстояние от фазового центра РЛС (точка О) до центра синтезирования (точка М),
R - расстояние от фазового центра РЛС до Рц, координаты которого неизвестны.
Взаимное положение точек О, М, Рц показано на фигуре 1.
Вектор  (линия визирования объекта) в земной системе отсчета известен, поскольку полагается, что координаты точек О и М, а также углы ориентации Ψ, ν, γ связанной системы отсчета относительно земной измеряются с помощью навигационной системы.
(линия визирования объекта) в земной системе отсчета известен, поскольку полагается, что координаты точек О и М, а также углы ориентации Ψ, ν, γ связанной системы отсчета относительно земной измеряются с помощью навигационной системы.
Вектор в земной системе отсчета есть

где: xm, ym, zm - координаты точки М;
x0, y0, z0 - координаты точки О.
В связанной системе отсчета вектор с координатами xв,yв,zв выразится как
где A(Ψ,ν,γ) является известной матрицей, определяющей переход из земной в связанную систему отсчета [6];
AT(Ψ,ν,γ) - транспонированная матрица.
При использовании для образования углов Ψ,ν,γ последовательности правых поворотов:
Ψ - поворот вокруг оси уземн,
ν - вокруг оси z1, получившейся после поворота на угол Ψ,
γ - вокруг оси x2 (после Ψ, ν).
Матрица A(Ψ,ν,γ) выражается в виде

AT(Ψ,ν,γ) - транспонированная матрица.
Вектор  в связанной системе отсчета может быть определен двумя углами α, β и дальностью R0:
в связанной системе отсчета может быть определен двумя углами α, β и дальностью R0:
Откуда:

Вектор 
В связанной системе отсчета

где (x, y, z) - координаты Рц в связанной системе отсчета.


И следовательно, фокусирующая функция (13), определяемая с точностью до постоянной фазы, может быть представлена в виде:

где 
fx, fy, fz - пространственные частоты.
Фокусирующая функция (23) выражена через пространственные частоты fx, fy, fz, являющиеся функциями λ и углов α, β, отсчитываемых в двух взаимно перпендикулярных направлениях связанной системы отсчета и представляющих собой сложные функции углов ориентации объекта Ψ,ν,γ и угла θ, определяющего наклон линии визирования РЛС по отношению к плоскости, перпендикулярной оси вращения объекта по углу Ψ:

Для практического использования оператора синтезирования (1) комплексные огибающие Φ отраженного сигнала должны быть зафиксированы в координатах fx, fy, fz.
Поскольку измерения Φ, f, Ψ, ν, γ привязаны ко времени, каждому значению скорректированной комплексной огибающей отраженного сигнала  может быть поставлен в соответствие вектор (fx, fy, fz).
может быть поставлен в соответствие вектор (fx, fy, fz).
И тогда оператор синтезирования (1) выразится как

Измерения производят при дискретных значениях f, Ψ,ν,γ. Вследствие этого преобразование (5) должно быть представлено в дискретной форме. Для этого переменные интегрирования fx, fy, fz заменяют номерами элементов трехмерной матрицы Т

где d - шаг построения элементов матрицы.
Поскольку диапазон изменения координат fx, fy, fz одинаков и равен  величина d должна быть одинаковой для fx, fy, fz.
величина d должна быть одинаковой для fx, fy, fz.
Величина d выбирается из условия обеспечения размещения величин  в различные элементы матрицы при различных параметрах f, Ψ,ν,γ. При этом величина d будет зависеть от того, насколько изменяются f, Ψ,ν,γ от измерения к измерению.
в различные элементы матрицы при различных параметрах f, Ψ,ν,γ. При этом величина d будет зависеть от того, насколько изменяются f, Ψ,ν,γ от измерения к измерению.
На практике выбор величины d целесообразно проводить методом проб: задают размер матрицы N3, размещают измерения в элементы матрицы и фиксируют события повторного размещения в элементы матрицы. Если повторы имели место, то размер матрицы увеличивают до (2N)3 и т.д.
Преобразование (5) в дискретной форме выражается суммой

являющейся трехмерным дискретным преобразованием Фурье.
При N=2k реализация (6) выполняется с помощью быстрого дискретного преобразования Фурье.
В частном случае, когда углы тангажа и крена являются пренебрежимо малыми либо когда производится их компенсация, предлагаемый способ получения трехмерного РЛИ может быть преобразован в способ получения двумерного РЛИ.
Действительно, при ν,γ≅0 матрица A(Ψ,ν,γ) приобретает вид

И тогда: 

Обозначив  получим
получим

Угол Ψ0 определяет начальную ориентацию линии визирования объекта относительно земной системы отчета.

При малых значениях угла α: sin α≈0, cos α≈1

Оператор синтезирования приобретает вид:

Приведение этого оператора к дискретному двумерному преобразованию Фурье аналогично описанному для случая трехмерного варианта.
Построение РЛИ, основанное на использовании предлагаемого способа, проведено методом моделирования.
Задавалась модель объекта в виде совокупности неподвижных относительно связанной системы отсчета Рц. Зондирующие сигналы РЛС - импульсы с периодом повторения 20 мкс. Несущая частота сигнала изменялась от импульса к импульсу с шагом 30 мГц в полосе от 2500 до 3500 МГц. Объект вращался по курсу со скоростью 12°/с. Линия визирования (РЛС - объект)составляла θ=3° и 20° по отношению к плоскости, перпендикулярной оси вращения объекта.
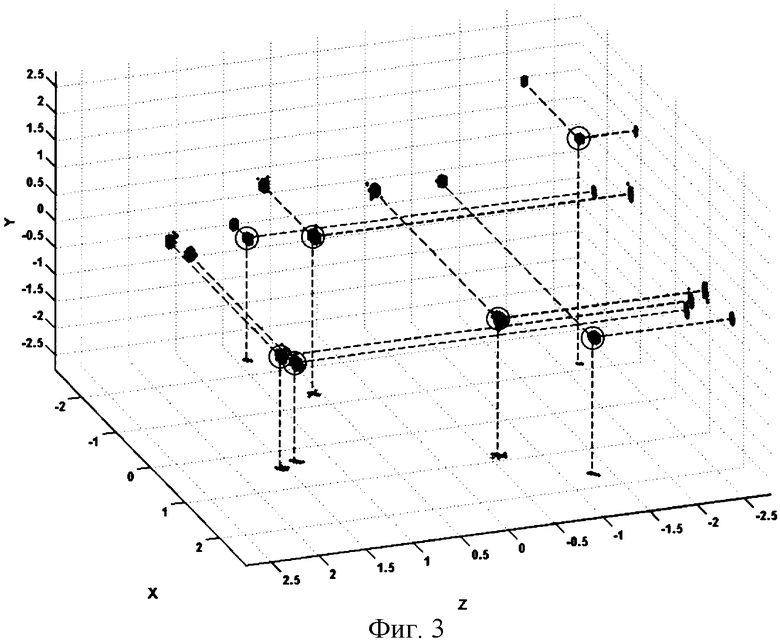
Сектор синтезирования ΔΨ=90°. Движение объекта по тангажу задавалось в виде гармонического колебания с амплитудой 5° и количеством периодов колебаний 2. Количество заданных Рц - 7. Амплитуды отраженных сигналов полагались одинаковыми для каждого Рц, равными 1. На фигурах 2 и 3 приводится трехмерное изображение объекта с проекциями синтезированных откликов Рц на координатные плоскости при углах визирования θ=3° и θ=20°. При этом сферами показаны положения рассеивающих центров с истинными координатами - в центре сферы. Точками в районе сферы отмечены области, где амплитуда сигнала в синтезированном отклике превышает половину максимального значения.
Значения амплитуд отклика на трехмерном изображении не показаны.
Полученные в откликах значения амплитуд были близкими к единице.
Параметры, при которых получено изображение:
сектор угла курса ΔΨ: 90°,
амплитуда тангажа: Аυ=5°,
количество периодов колебаний тангажа: 2,
вертикальный угол визирования объекта θ=3°.
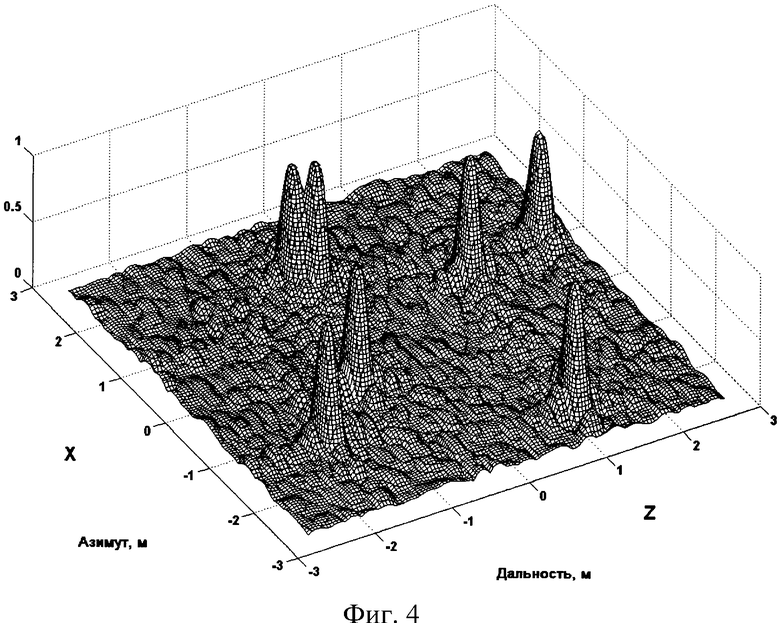
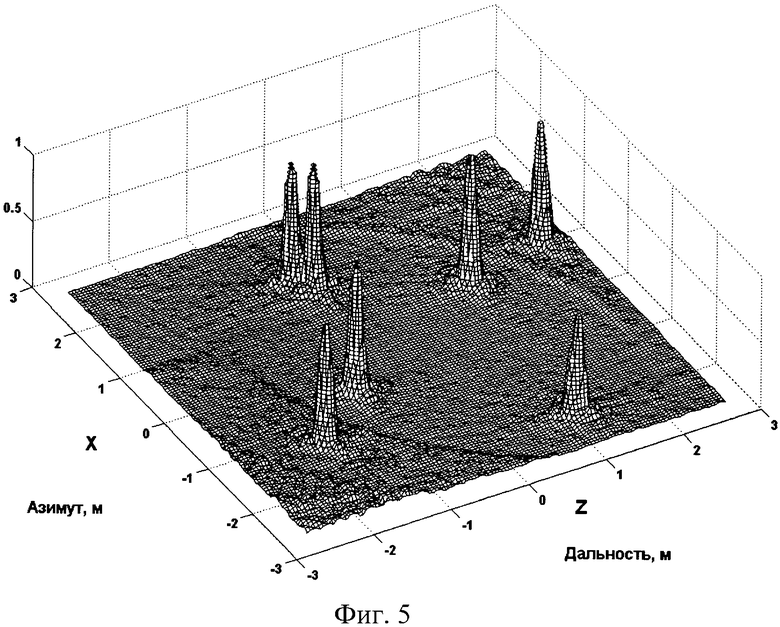
На фигурах 4 и 5 приводится двумерное РЛИ объекта при секторе угла ΔΨ: 10° и двумерное РЛИ объекта при секторе угла ΔΨ: 90°.
Здесь на плоскости (x, z) показаны координаты синтезированных откликов Рц, а в направлении, перпендикулярном плоскости (x, z), отложены амплитуды откликов.
Литература
1. Триангуляционный способ построения двумерного РЛИ цели в РЛС сопровождения с инверсным синтезированием апертуры. Патент RU 2099742 С1, кл. G 01 S 13/89.
2. Астанин Л.Ю., Костылев А.А. Основы сверхширокополосных радиолокационных измерений. М.: Радио и связь. 1989.
3. Способ построения двумерного РЛИ прямолинейно летящей цели при многочастотном узкополосном зондировании. Патент RU 2099743 С1, кл. G 01 S 13/89.
4. Зиновьев Ю.С., Пасмуров А.Я. Методы обращенного синтезирования апертуры в радиолокации с помощью узкополосных сигналов. Зарубежная радиоэлектроника. №3, 1985.
5. I.Fortuny. An Efficient 3-D Near-Field ISAR Algorithm. IEEE Transactions on Aerospace and Electronic Systems. Vol.34, №4, October 1998.
6. Г.Корн, Т.Корн. Справочник по математике. М.: Наука, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА В БОЛЬШОМ ДИАПАЗОНЕ ИЗМЕНЕНИЯ ВЕЛИЧИН ЭФФЕКТИВНЫХ ПЛОЩАДЕЙ РАССЕИВАНИЯ ЛОКАЛЬНЫХ ЦЕНТРОВ ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ | 2008 |
|
RU2372627C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ | 2010 |
|
RU2422851C1 |
| Способ получения двумерного радиолокационного изображения объекта при многочастотном импульсном зондировании и инверсном синтезе апертуры с итерационным уточнением расстояния от эквивалентного фазового центра антенны до точки синтезирования | 2016 |
|
RU2628997C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ И ИНВЕРСНОМ СИНТЕЗЕ АПЕРТУРЫ С ОПРЕДЕЛЕНИЕМ ТРЕТЬЕЙ КООРДИНАТЫ ЭЛЕМЕНТОВ ФОРМИРУЕМОГО ИЗОБРАЖЕНИЯ | 2019 |
|
RU2723706C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ И ИНВЕРСНОМ СИНТЕЗЕ АПЕРТУРЫ С УЧЕТОМ БЛИЖНЕЙ ЗОНЫ ЛОКАЦИИ | 2023 |
|
RU2810725C1 |
| Способ построения панорамного радиолокационного изображения объекта | 2016 |
|
RU2629372C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА ПРИ ИНВЕРСНОМ СИНТЕЗЕ АПЕРТУРЫ | 2024 |
|
RU2836418C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ, ОБЕСПЕЧИВАЮЩИЙ ВОССТАНОВЛЕНИЕ АМПЛИТУДЫ И ФАЗЫ ОТРАЖЕННОГО СИГНАЛА | 2023 |
|
RU2819757C1 |
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ПО ТРАЕКТОРНЫМ НЕСТАБИЛЬНОСТЯМ ЕЕ ПОЛЕТА | 2000 |
|
RU2180445C2 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОЙ ПРОВЕРКИ ИНФОРМАЦИОННЫХ И ИДЕНТИФИКАЦИОННЫХ ВОЗМОЖНОСТЕЙ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571957C1 |


Изобретение может быть использовано для получения трехмерного радиолокационного изображения (РЛИ) объекта, который вращается по углу курса, при наличии некоторого движения по углам тангажа и крена. Достигаемым техническим результатом изобретения является повышение точности определения РЛИ. Указанный результат достигается за счет использования специальной фокусирующей функции, а также за счет применения криволинейных координат fx, fy, fz, являющихся функциями частоты и углов ориентации объекта, при этом комплексные огибающие отраженного сигнала размещают в матрицу, по полученной трехмерной матрице синтезированного отклика получают трехмерное РЛИ. 5 ил.
Способ получения трехмерного радиолокационного изображения вращающегося по курсу, тангажу и крену объекта при многочастотном импульсном зондировании, заключающийся в излучении импульсных сигналов с несущей частотой, изменяющейся от импульса к импульсу с шагом Δf в полосе ΔF, приема отраженных сигналов, измерении комплексных огибающих отраженных сигналов Ф, запоминании их в течении времени синтезирования в угловом секторе Δψ, поворота объекта по курсу, образовании матрицы комплексных огибающих и преобразовании ее с помощью быстрого двумерного преобразования Фурье в матрицу синтезированного отклика, определении величины порога по уровню первых боковых лепестков наиболее интенсивного откликом, сравнении значений элементов матрицы с порогом для выделения превышающих порог элементов матрицы, совокупность которых принимают за радиолокационное изображение объекта, отличающийся тем, что при больших секторах угла синтезирования по курсу при наличии вращения объекта по тангажу и крену, измеряют углы курса ψ(t), тангажа ν(t) и крена γ(t) связанной системы отсчета с началом в точке М на оси вращения объекта относительно земной системы отсчета, измеряют координаты точки М и точки 0 фазового центра антенны радиолокационной станции (РЛС) в земной системе отсчета, координаты вектора  преобразуют в координаты связанной системы отсчета
преобразуют в координаты связанной системы отсчета 
с помощью матрицы А(ψ,ν,γ), определяющей переход из связанной в земную систему отсчета, определяют углы ориентации α, β вектора в связанной системе отсчета



R0 - расстояние от точки 0 фазового центра антенны РЛС до точки М, являющейся центром синтезирования, производят коррекцию фазы в измеренных значениях комплексных огибающих Ф отраженного сигнала на величину  где
где  , с - скорость света, f - частота зондирующего сигнала, определяют пространственные частоты
, с - скорость света, f - частота зондирующего сигнала, определяют пространственные частоты
 ,
,
 ,
,

при значениях λ, α, β, соответствующих моменту времени измерения Ф, скорректированные по фазе значения комплексных огибающих отраженного сигнала  размещают в элементы матрицы Т, трехмерные номера которых (l, m, n) определяют по формулам
размещают в элементы матрицы Т, трехмерные номера которых (l, m, n) определяют по формулам

где d - шаг матрицы Т по координатам fx, fy, fz,
матрицу Т подвергают трехмерному дискретному преобразованию Фурье 
и по полученной трехмерной матрице синтезированного отклика определяют трехмерное радиолокационное изображение объекта.
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПРЯМОЛИНЕЙНО ЛЕТЯЩЕЙ ЦЕЛИ ПРИ МНОГОЧАСТОТНОМ УЗКОПОЛОСНОМ ЗОНДИРОВАНИИ | 1995 |
|
RU2099743C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ СЛОЖНЫХ ШИРОКОПОЛОСНЫХ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ С ФИЛЬТРАЦИЕЙ В МАСШТАБНО-ВРЕМЕННОЙ ОБЛАСТИ | 2004 |
|
RU2282209C1 |
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ | 2003 |
|
RU2234110C1 |
| US 4929951, 29.05.1990 | |||
| US 5847673 А, 08.12.1998 | |||
| ДВУХПОЗИЦИОННЫЙ ТЕРМОРЕГУЛЯТОР | 0 |
|
SU334560A1 |

