Изобретение относится к области исследования радиолокационных характеристик объекта и получения его радиолокационных изображений (РЛИ) при использовании многочастотного импульсного зондирования и синтезирования апертуры антенны.
Методы получения РЛИ объекта основаны на цифровой обработке комплексной огибающей отраженного от него сигнала, измеренного в широкой полосе частот зондирующих импульсов РЛС при различных ракурсах наблюдения объекта.
Комплексная огибающая отраженного от объекта сигнала имеет вид
 ,
,
где А - амплитуда отраженного сигнала,
R - расстояние от РЛС до объекта,
λ - длина волны зондирующего сигнала,
φо - скачок фазы, возникающий при отражении от объекта,
π=3,1415926535.
Модель исследуемого объекта - совокупность локальных рассеивающих центров (РЦ), у которых эффективная площадь рассеяния (ЭПР) и координаты в связанной с объектом системе отсчета являются постоянными в течение времени измерения отраженного сигнала.
Известен [Патент RU 2372627 С1. МПК: G01S 13/89 (2006.01), 10.11.2009] способ получения двумерного радиолокационного изображения в большом диапазоне изменения величин эффективных площадей рассеивания локальных рассеивающих центров при многочастотном импульсном зондировании, включающий излучение импульсов с изменением несущей частоты от импульса к импульсу с шагом Δf в полосе частот ΔF, прием отраженных сигналов, измерение комплексных огибающих Ф отраженных сигналов и запоминание их в течение времени синтезирования в секторе углов наблюдения Δψ, образование матрицы комплексных огибающих и преобразование ее с помощью быстрого двумерного преобразования Фурье в двумерную матрицу синтезированных откликов, определение величины порога по уровню первых боковых лепестков наиболее интенсивного отклика, сравнение величин откликов с порогом для выделения превышающих порог элементов матрицы, совокупность которых принимают за радиолокационное изображение объектов, отличающийся тем, что измеряют частоту f(tnm) зондирующих импульсов, момент времени tnm запоминают, где n - номер шага перестройки частоты, m - номер повторного цикла перестройки, измеряют в земной системе отсчета в момент времени tnm координаты центра антенны радиолокационной станции (РЛС) и выбранного центра синтезирования на объекте, измеряют относительно земной системы отсчета угол наблюдения ψ(tnm) связанной с объектом системы отсчета с началом в центре синтезирования, вычисляют пространственные частоты


где с - скорость света, ψ0 - угол между линией, соединяющей фазовый центр антенны РЛС с центром синтезирования, и осью z земной системы отсчета, фазы измеренных комплексных огибающих отраженных сигналов корректируют к расстоянию от центра антенны РЛС до точки синтезирования, полученные после коррекции значения комплексных огибающих размещают в элементы двумерной матрицы с номерами (k, l), где
 int[*] - функция определения целой части числа, d - шаг изменения значений пространственных частот, матрицу подвергают двумерному дискретному преобразованию Фурье и по полученной матрице синтезированных откликов в координатах (х, z) связанной с объектом системы отсчета определяют оценки координат и ЭПР РЦ с большими значениями ЭПР, затем уточняют эти оценки по минимуму функции энергии матрицы комплексных огибающих, корректируют исходную матрицу комплексных огибающих путем изъятия информации о РЦ с большими значениями ЭПР и повторно синтезируют матрицу откликов, получая РЛИ с РЦ, имеющими малые значения ЭПР.
int[*] - функция определения целой части числа, d - шаг изменения значений пространственных частот, матрицу подвергают двумерному дискретному преобразованию Фурье и по полученной матрице синтезированных откликов в координатах (х, z) связанной с объектом системы отсчета определяют оценки координат и ЭПР РЦ с большими значениями ЭПР, затем уточняют эти оценки по минимуму функции энергии матрицы комплексных огибающих, корректируют исходную матрицу комплексных огибающих путем изъятия информации о РЦ с большими значениями ЭПР и повторно синтезируют матрицу откликов, получая РЛИ с РЦ, имеющими малые значения ЭПР.
Основным достоинством указанного способа синтезирования двумерных РЛИ, в отличие от использовавшихся ранее ([Патент RU 2099743 С1. МПК: G01S 13/89, 20.12.1997], [Нестеров С.М. и др. Особенности формирования двумерных радиолокационных изображений объектов ступенчатыми ЛЧМ сигналами. «Радиотехника», 2001, №5]), является обеспечение повышения разрешающей способности РЛИ и точности оценок РЦ при расширении сектора углов поворота объекта относительно линии визирования, что достигается за счет формирования матрицы комплексных огибающих в координатах пространственных частот. Поскольку значения пространственных частот и координат РЦ в записи фазы комплексных огибающих связаны линейным образом, то в результате преобразования Фурье отраженный сигнал, определенный в области пространственных частот, преобразуется в область декартовых координат без искажения при увеличении полосы частот и сектора углов поворота.
Описанный способ взят в качестве прототипа.
Недостатком указанного способа является нереализуемость заложенной в измеренной информации потенциальной точности разрешения РЦ. Так, по результатам моделирования [Патент RU 2372627 С1. МПК: G01S 13/89 (2006.01), 10.11.2009] в первично синтезированном РЛИ с вероятностью, близкой к 1, разрешаются РЦ объекта в диапазоне изменения ЭПР не более 12 дБ. Расширение этого диапазона достигается использованием дополнительной математической обработки первичного РЛИ, заключающейся в уточнении оценок РЦ с большими значениями ЭПР, и повторном синтезировании РЛИ по матрице комплексных огибающих с изъятой информацией о РЦ с большими ЭПР. В результате удается расширить диапазон ЭПР разрешаемых РЦ до 20 дБ. Дальнейшее расширение этого диапазона способом-прототипом проблематично.
Подобный результат объясняется тем, что в прототипе не обеспечивается формирование двумерных РЛИ с достижимой для заданной полосы частот разрешающей способностью. При формировании РЛИ в прототипе задается как полоса частот, так и размер интервала углов синтезирования. То есть не учитывают, что заданная полоса частот определяет размер сектора углов, для которого реализуется достижимая разрешающая способность двумерного РЛИ, и что синтезирование такого РЛИ обеспечивается при условии выявления требуемых пределов изменения и значений пространственных частот, которые зависят от заданной полосы частот, связанного с ней размера сектора углов наблюдения, а также заданных размеров области синтезирования РЛИ.
В способе-прототипе задают полосу частот и интервал изменения углов, по измеренным углам и частотам рассчитывают возможные значения пространственных частот, по которым получают номера матрицы комплексных огибающих, используя шаг d изменения значений пространственных частот, задаваемый произвольным образом. После чего в элементы матрицы с вычисленными таким образом номерами заносят измеренные значения комплексных огибающих.
При подобном формировании матрицы комплексных огибающих в один и тот же элемент матрицы могут заноситься разные измеренные значения, в результате чего не вся измеренная и значимая информация будет использована при построении РЛИ. Поэтому, при попытке записи нового измеренного значения в уже заполненный элемент матрицы, в прототипе уменьшают шаг d и пропорционально увеличивают тем самым размер матрицы. На практике это приводит к формированию матрицы комплексных огибающих, размеры которой в несколько раз больше необходимых, причем некоторые элементы этой большой матрицы оказываются незаполненными, что, с одной стороны, ухудшает качество получаемых РЛИ, а с другой, из-за увеличения объема вычислений, ограничивает возможность реализации режима формирования РЛИ в реальном масштабе времени.
Для формирования матрицы комплексных огибающих, обеспечивающей достижимую для заданной полосы частот разрешающую способность синтезируемых РЛИ, предлагается решать обратную задачу: получив значения пространственных частот, вычислить по ним соответствующие значения частоты и угла, а затем выбрать из измеренных соответствующие им значения комплексных огибающих. При этом требуется вычислить требуемые размер интервала углов наблюдения и диапазон изменения пространственных частот (в этой связи необходимо отметить ошибку авторов, полагающих, что диапазон изменения координат fx, fz равен  , где fmax - максимальное значение частоты в полосе ее перестройки. Очевидно, что такой диапазон изменения fx, fz соответствует полосе частот с максимальным значением частоты, равным
, где fmax - максимальное значение частоты в полосе ее перестройки. Очевидно, что такой диапазон изменения fx, fz соответствует полосе частот с максимальным значением частоты, равным  , и минимальным, равным 0).
, и минимальным, равным 0).
В результате перечисленных недостатков прототипа падает разрешающая способность формируемого РЛИ, изображение расфокусируется, и в целом способ не обеспечивает достижения потенциальной точности разрешения РЦ.
Предлагается способ, позволяющий избежать указанных недостатков.
Способ решает задачу получения двумерного РЛИ объекта с достижимой для заданной полосы частот разрешающей способностью, обеспечивая повышение точности определения координат и ЭПР РЦ в широком диапазоне изменения их ЭПР.
Технический результат, заключающийся в повышении точности определения координат и ЭПР РЦ в широком диапазоне изменения их ЭПР в соответствии с достижимой для заданной полосы частот зондирующего сигнала разрешающей способностью РЛИ, достигается путем вычисления размера Δψ половины сектора углов наблюдения, запоминания измеренных комплексных огибающих отраженных сигналов в секторе углов ±Δψ, вычисления по заданной полосе частот и полученному размеру сектора углов наблюдения пределов изменения пространственных частот и их значений, образования двумерной матрицы комплексных огибающих путем выбора из измеренных тех значений, которые соответствуют результатам вышеуказанных вычислений, что в целом позволяет синтезировать РЛИ объекта с достижимой для заданной полосы частот разрешающей способностью и обеспечивает разрешение РЦ объекта в более широком, по сравнению с прототипом, диапазоне изменения их ЭПР даже без используемой в прототипе дополнительной математической обработки.
Для достижения указанного технического результата в известном способе получения двумерного радиолокационного изображения объекта при многочастотном импульсном зондировании, включающем излучение импульсов с изменением несущей частоты f от импульса к импульсу с шагом Δf в полосе частот ΔF, измерение частоты f(tnm) зондирующих импульсов в моменты времени tnm, где n - номер шага перестройки частоты, m - номер повторного цикла перестройки, измерение в земной системе отсчета в те же моменты времени координат центра антенны радиолокационной станции (РЛС) и координат выбранного центра синтезирования на объекте, измерение относительно земной системы отсчета угла наблюдения ψ(tnm) связанной с объектом системы отсчета с началом в центре синтезирования, прием отраженных сигналов, измерение комплексных огибающих Ф(tnm) отраженных сигналов, корректировку фазы измеренных комплексных огибающих отраженных сигналов по расстоянию от центра антенны РЛС до точки синтезирования, запоминание измеренных комплексных огибающих отраженных сигналов в течение времени синтезирования в угловом секторе, образование двумерной матрицы комплексных огибающих в координатах пространственных частот  ,
,  и преобразование ее с помощью быстрого двумерного преобразования Фурье в двумерную матрицу синтезированных откликов, определение величины порога по уровню первых боковых лепестков наиболее интенсивного отклика, сравнение величин откликов с порогом для выделения превышающих порог элементов матрицы, определение радиолокационного изображения объектов в виде совокупности выделенных элементов матрицы, согласно изобретению
и преобразование ее с помощью быстрого двумерного преобразования Фурье в двумерную матрицу синтезированных откликов, определение величины порога по уровню первых боковых лепестков наиболее интенсивного отклика, сравнение величин откликов с порогом для выделения превышающих порог элементов матрицы, определение радиолокационного изображения объектов в виде совокупности выделенных элементов матрицы, согласно изобретению
определяют размер Δψ половины сектора углов наблюдения, исходя из соотношения 
где  , fcp - средняя частота в полосе перестройки, запоминают измеренные комплексные огибающие отраженных сигналов в секторе углов наблюдения ±Δψ, заносят в элементы с номерами (n1, m1) двумерной матрицы комплексных огибающих значения, полученные для номера n2 шага перестройки частоты и номера m2 повторного цикла перестройки, где
, fcp - средняя частота в полосе перестройки, запоминают измеренные комплексные огибающие отраженных сигналов в секторе углов наблюдения ±Δψ, заносят в элементы с номерами (n1, m1) двумерной матрицы комплексных огибающих значения, полученные для номера n2 шага перестройки частоты и номера m2 повторного цикла перестройки, где  ,
, 
 , с - скорость света, n1=1,…,N1, m1=1,…,M1, N1=Lz(max fz - min fz), M1=Lx(max fx - min fx), Lz, Lx - размеры области синтезирования радиолокационного изображения по продольной z и поперечной х координатам,
, с - скорость света, n1=1,…,N1, m1=1,…,M1, N1=Lz(max fz - min fz), M1=Lx(max fx - min fx), Lz, Lx - размеры области синтезирования радиолокационного изображения по продольной z и поперечной х координатам,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Из приведенной совокупности существенных признаков предлагаемого способа следует, что общими с прототипом являются признаки излучения зондирующих импульсов с изменением несущей частоты от импульса к импульсу в полосе частот ΔF, измерения частоты зондирующих импульсов, измерения в земной системе отсчета координат центра антенны радиолокационной станции (РЛС) и координат выбранного центра синтезирования на объекте, измерения относительно земной системы отсчета угла наблюдения ψ связанной с объектом системы отсчета с началом в центре синтезирования, приема отраженных сигналов, измерения комплексных огибающих отраженных сигналов, корректировки фазы измеренных комплексных огибающих отраженных сигналов к расстоянию от центра антенны РЛС до точки синтезирования, запоминания измеренных комплексных огибающих отраженных сигналов в течение времени синтезирования в угловом секторе, образования двумерной матрицы комплексных огибающих и преобразования двумерной матрицы комплексных огибающих с помощью быстрого двумерного преобразования Фурье в двумерную матрицу синтезированных откликов, определения величины порога по уровню первых боковых лепестков наиболее интенсивного отклика, сравнения величин откликов с порогом для выделения превышающих порог элементов матрицы, определения радиолокационного изображения в виде совокупности выделенных элементов матрицы и вычисления для них оценок координат и ЭПР РЦ.
Признаки запоминания комплексных огибающих в угловом секторе и образования матрицы комплексных огибающих являются общими с прототипом только формально, так как определены размеры матрицы комплексных огибающих и предложено правило выбора измеренных значений комплексных огибающих в качестве элементов этой матрицы.
Признак определения размера Δψ половины сектора углов наблюдения, в котором для обеспечения достигаемой для заданной полосы частот разрешающей способности РЛИ необходимо запоминать измеренные комплексные огибающие, является отличительным.
Описание предлагаемого способа заключается в следующем.
Известно [Патент RU 2372627 С1. МПК: G01S 13/89 (2006.01), 10.11.2009], что оператор синтезирования РЛИ после свертки комплексных огибающих с фокусирующей опорной функцией и с учетом условий дальней зоны локации представляется в виде

где g, z, x - неизвестные параметры РЦ: амплитуда отраженного ими сигнала и их декартовы координаты в продольном (по дальности) и поперечном направлениях в плоскости локации, связанной с объектом системы отсчета;
Ф*(fz, fx) - значения в области переменных fz и fx измеренных комплексных огибающих Ф(tnm), фазы которых скорректированы для обеспечения постоянной дальности от центра антенны РЛС до центра синтезирования РЛИ в течение времени синтезирования,

В (3), в отличие от (1), но не ограничивая общности рассуждения, для удобства выкладок предполагается, что ракурс синтезируемого РЛИ ψ0=0 (т.е. ось z земной системы выбирается в направлении линии, соединяющей фазовый центр антенны РЛС с центром синтезирования), угол наблюдения ψ отсчитывается в противоположном направлении и изменен порядок интегрирования. С учетом этого замечания преобразование (2) точно повторяет (17) из [Патент RU 2372627 С1. МПК: G01S 13/89 (2006.01), 10.11.2009].
Дискретную форму преобразования (2) запишем в виде

где 

Lz, Lx - задаваемые размеры области синтезирования РЛИ по продольной z и поперечной х координатам.
Нелинейная зависимость координат fz, fx от угла ψ приводит к сложной взаимосвязи пределов изменения их значений с размерами полосы перестройки частоты и сектора угла наблюдения.
В предлагаемом способе вычисляют требуемые для заданной полосы перестройки частоты размер сектора углов наблюдения и пределы изменения введенных пространственных частот, реализующие достижимую разрешающую способность РЛИ.
Из (4)следует, что


где fmax, fmin - максимальное и минимальное значения частоты в полосе ΔF.
В силу симметрии задачи достижимая разрешающая способность двумерных РЛИ Δ2 обеспечивается при условии равенства разрешающих способностей по координатам z и х:

где  ,
,  .
.
Решая (6)-(10), последовательно получаем
 ,
,






где  ,
,
 , fcp - средняя частота в полосе перестройки,
, fcp - средняя частота в полосе перестройки,
 - средняя в полосе перестройки длина волны.
- средняя в полосе перестройки длина волны.
Сравнивая (11) и (16), получаем удобную для практики оценку разрешающей способности двумерных РЛИ: Δ2≈Δ1, где  (при увеличении Δψ от 0 до 90° относительное превышение Δ2 над Δ1 монотонно увеличивается от 0 до, примерно, 12%; так что при Δψ=90°, то есть близкой к 200% перестройке частоты, Δ2≈1,12Δ1, где
(при увеличении Δψ от 0 до 90° относительное превышение Δ2 над Δ1 монотонно увеличивается от 0 до, примерно, 12%; так что при Δψ=90°, то есть близкой к 200% перестройке частоты, Δ2≈1,12Δ1, где  ).
).
В соответствии с полученными из (11)-(15) размером интервала углов наблюдения и пределами изменения пространственных частот вычисляют размеры матрицы комплексных огибающих, шаг изменения значений пространственных частот, значения пространственных частот, относительно которых необходимо формировать матрицу комплексных огибающих, а затем соответствующие им значения частоты f и угла наблюдения ψ, для которых требуется измерить (или получить из уже измеренных) значения комплексных огибающих.
При синтезировании РЛИ объекта в предлагаемом способе используют следующую последовательность действий.
Задают ракурс синтезируемого РЛИ ψ0.
Из (11) определяют размер половины сектора углов наблюдения Δψ.
В интервале углов наблюдения ψ0±Δψ измеряют и запоминают моменты времени tnm, где n - номер шага перестройки частоты, m - номер повторного цикла перестройки, частоты f(tnm) зондирующих импульсов, углы наблюдения ψ(tnm) связанной с объектом системы отсчета, комплексные огибающие отраженных от объекта сигналов Ф(tnm) и координаты в земной системе отсчета центра антенны РЛС и центра связанной с объектом системы отсчета.
Из (12)-(15) находят значения min fz, max fz, min fx, max fx.
Из (5) вычисляют значения N1, М1.
Вычисляют расстояния между центром антенны и центром связанной системы отсчета в моменты измерений и по ним корректируют фазы измеренных комплексных огибающих.
Измеренные углы наблюдения корректируют по ракурсу ψ0.
Вычисляют значения частот  , где n=1,…,N; N - количество шагов перестройки частоты; min f - минимальное значение частоты в заданной полосе ее перестройки.
, где n=1,…,N; N - количество шагов перестройки частоты; min f - минимальное значение частоты в заданной полосе ее перестройки.
Вычисляют значения пространственных частот:
 ,
,  , n1=1,…N1;
, n1=1,…N1;
 ,
,  , m1=1,…M1.
, m1=1,…M1.
Формируют матрицу T(n1, m1), в элементы которой с номерами (n1, m1) заносят значения комплексных огибающих  , где номера n2, m2 выбирают последовательно из условии
, где номера n2, m2 выбирают последовательно из условии  ,
,  .
.
С целью снижения уровня боковых лепестков от синтезируемых откликов РЦ используют весовую обработку матрицы в соответствии с цифровым фильтром (окном) Хэмминга, для чего корректируют элементы матрицы Т(n1, m1), исходя из соотношения [Хэмминг Р.В. Цифровые фильтры. М.: «Сов. радио». 1980. С.100]
 .
.
Увеличивают размерность матрицы T* до К=2P, где р - целое число, путем добавления нулевых элементов с номерами (n1, m1), где
N1<n1≤К, M1<m1≤К.
Затем матрицу Т* подвергают двумерному быстрому дискретному преобразованию Фурье и по полученной двумерной матрице синтезированных откликов определяют двумерное радиолокационное изображение объекта как совокупность откликов, интенсивность которых превышает задаваемый порог по величине ЭПР от значения наиболее интенсивного отклика.
В условиях нулевых ошибок измерений этот порог определяется параметрами использованной весовой функции (цифрового фильтра). Известно [Хэмминг Р.В. Цифровые фильтры. М.: «Сов. радио». 1980], что применение функции Хэмминга приводит к снижению уровня боковых лепестков отклика от РЦ на -43 дБ и расширению отклика в 2 раза.
На практике, с учетом существующих погрешностей измерений и нестабильности работы измерительной аппаратуры, значение порога уменьшают в соответствии с критерием выявления образа объекта на фоне шума.
Работоспособность предлагаемого способа проверена методом математического моделирования.
Условия локации при моделировании заданы как в известном способе [Патент RU 2372627 С1. МПК: G01S 13/89 (2006.01), 10.11.2009]:
зондирующие сигналы РЛС - импульсы с периодом повторения 20 мкс,
несущая частота сигнала меняется от импульса к импульсу с шагом 3000/511 МГц в полосе частот от 8500 до 11500 МГц,
объект равномерно вращается со скоростью 12°/c.
Модель объекта задана в виде совокупности неподвижных относительно связанной системы отсчета РЦ, которые расположены тремя изолированными группами по 9 РЦ в каждой группе с удалением соседних РЦ по одной из координат на 40 см.
Диапазон значений ЭПР заданных РЦ выбран равным 40 дБ.
ЭПР каждой тройки РЦ, расположенных в линию, задавалась одинаковой.
Заданные значения ЭПР РЦ соседних троек отличаются с шагом -5 дБ, так что ЭПР РЦ в первой тройке равна 0 дБ, во второй -5 дБ, в третьей -10 дБ, в последней девятой -40 дБ.
Из (11) и (16) следует, что для заданной 30% перестройки частоты размер половины сектора углов синтезирования составляет примерно 10° (заметим, что при моделировании в прототипе задавался неоптимальный размер сектора углов, равный 16°), а достижимая разрешающая способность РЛИ равна Δ2≈1,7 λср, (или 3,4 λср при использовании весовой обработки).
На фиг.1 приведено двумерное РЛИ объекта в плоскости локации, полученное предложенным способом в секторе углов наблюдения ±10° относительно ракурса синтезированного РЛИ без учета ошибок измерения амплитуды и фазы комплексных огибающих, а также координат центра синтезирования и углов курса.
Использовано весовое окно Хэмминга. Порог отрисовки РЛИ по величине ЭПР задан равным -45 дБ.
Различная интенсивность элементов матрицы синтезированных откликов показана на фиг.1 разными цветами серой палитры: от белого цвета при значениях ЭПР, равных -45 дБ и меньше, до черного при 0 дБ. На фигуре подписаны заданные значения ЭПР соответствующих троек РЦ.
Анализ полученных результатов показывает, что в условиях отсутствия ошибок измерений предложенный способ обеспечивает разрешение РЦ в диапазоне изменения ЭПР не менее 40 дБ с погрешностью оценок их координат и ЭПР, равной, соответственно, 
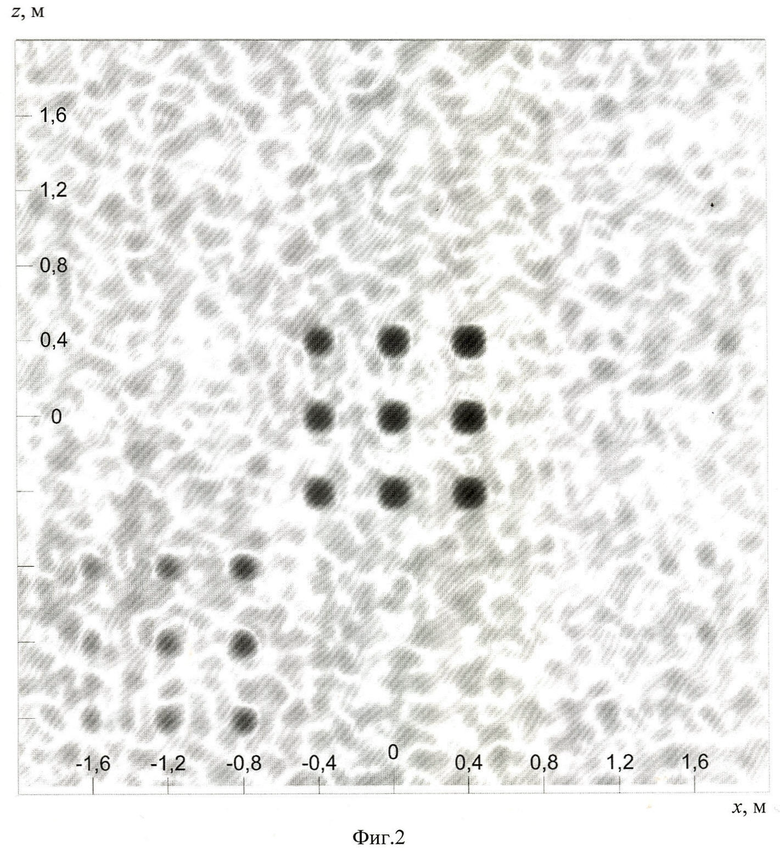
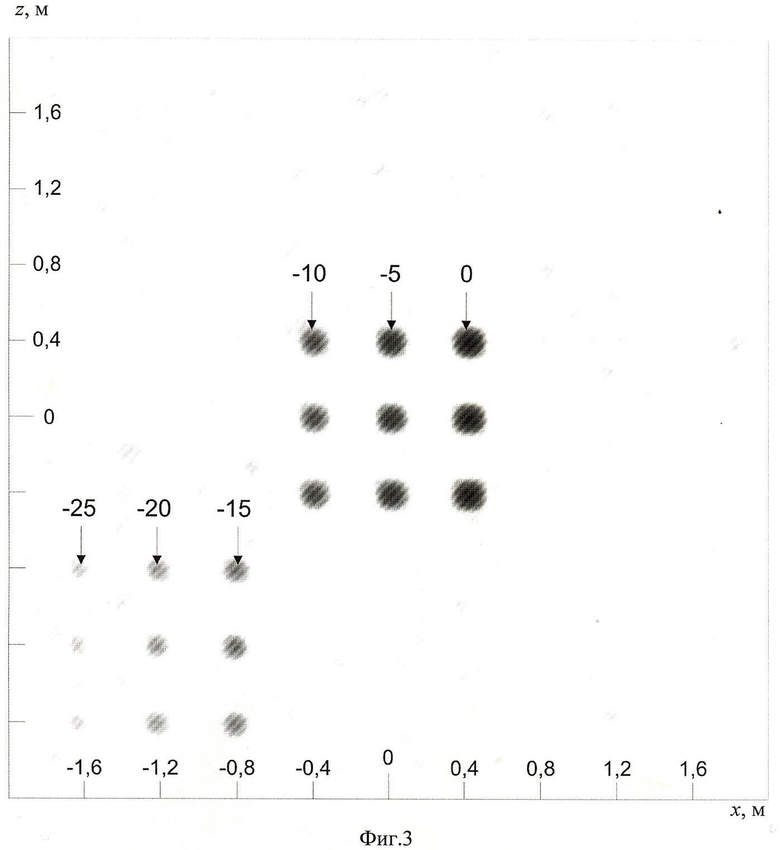
На фиг.2 и 3 приведено двумерное РЛИ объекта в плоскости локации, полученное предложенным способом в том же секторе углов наблюдения с учетом заданных ошибок измерения амплитуды и фазы комплексных огибающих, координат центра синтезирования и углов курса. Значения заданных ошибок соответствуют использованным в прототипе:  , δφ=30°, δх=δz=2 мм, δψ=0,05°.
, δφ=30°, δх=δz=2 мм, δψ=0,05°.
На фиг.2 порог отрисовки полученного РЛИ по величине ЭПР задан равным -45 дБ, видно большое количество синтезированных ложных откликов в диапазоне изменения значений ЭПР от -30 до -45 дБ. На фиг.3 порог задан равным -30 дБ.
Анализ результатов моделирования показывает, что в условиях заданных ошибок использование предложенного способа обеспечивает разрешение РЦ в диапазоне изменения их ЭПР не менее 25 дБ с вышеуказанной погрешностью оценок координат и значений ЭПР РЦ даже без дополнительной математической обработки матриц комплексных огибающих и синтезируемых откликов, используемой в известном способе. В диапазоне изменения ЭПР более 25 дБ появляются ложные отклики и при уменьшении ЭПР РЦ от -25 дБ до -30 дБ вероятность их идентификации снижается от 1 до 0. При использовании предложенной в способе-прототипе дополнительной математической обработки диапазон разрешаемых РЦ по величине ЭПР увеличивается до 30 дБ.
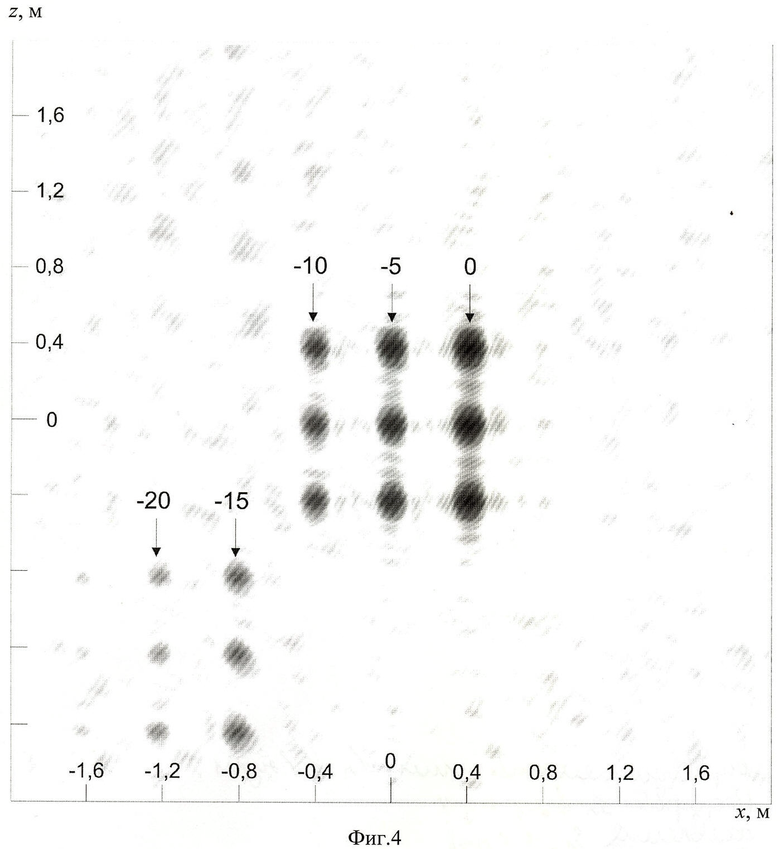
На фиг.4 приведено двумерное РЛИ объекта в плоскости локации, полученное в соответствии со способом-прототипом для тех же условий локации, но в секторе углов наблюдения размером 16° (±8°), как в прототипе. Порог отрисовки синтезированного РЛИ задан как для фиг.3.
Анализ полученного РЛИ показывает, что способ-прототип обеспечивает разрешение РЦ с вышеуказанной погрешностью оценок их координат и ЭПР в диапазоне изменения ЭПР не более 20 дБ. В диапазоне изменения ЭПР более 20 дБ синтезируется большое количество ложных откликов, в результате чего вероятность идентификации РЦ с ЭПР менее -20 дБ стремится к 0.
Кроме того, видна расфокусировка РЛИ объекта на фиг.4 по сравнению с фиг.3, что связано с вышеотмеченными недостатками прототипа.
Технический результат достигнут: устранены недостатки прототипа, расширен диапазон по величине ЭПР выделяемых РЦ, обеспечена точность определения их координат и ЭПР в соответствии с разрешающей способностью, достигаемой для заданной полосы частот зондирующего сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ И ИНВЕРСНОМ СИНТЕЗЕ АПЕРТУРЫ С УЧЕТОМ БЛИЖНЕЙ ЗОНЫ ЛОКАЦИИ | 2023 |
|
RU2810725C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ И ИНВЕРСНОМ СИНТЕЗЕ АПЕРТУРЫ С ОПРЕДЕЛЕНИЕМ ТРЕТЬЕЙ КООРДИНАТЫ ЭЛЕМЕНТОВ ФОРМИРУЕМОГО ИЗОБРАЖЕНИЯ | 2019 |
|
RU2723706C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ, ОБЕСПЕЧИВАЮЩИЙ ВОССТАНОВЛЕНИЕ АМПЛИТУДЫ И ФАЗЫ ОТРАЖЕННОГО СИГНАЛА | 2023 |
|
RU2819757C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА ПРИ ИНВЕРСНОМ СИНТЕЗЕ АПЕРТУРЫ | 2024 |
|
RU2836418C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА В БОЛЬШОМ ДИАПАЗОНЕ ИЗМЕНЕНИЯ ВЕЛИЧИН ЭФФЕКТИВНЫХ ПЛОЩАДЕЙ РАССЕИВАНИЯ ЛОКАЛЬНЫХ ЦЕНТРОВ ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ | 2008 |
|
RU2372627C1 |
| Способ получения двумерного радиолокационного изображения объекта при многочастотном импульсном зондировании и инверсном синтезе апертуры с итерационным уточнением расстояния от эквивалентного фазового центра антенны до точки синтезирования | 2016 |
|
RU2628997C1 |
| Способ построения панорамного радиолокационного изображения объекта | 2016 |
|
RU2629372C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ УЧАСТКОВ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2024 |
|
RU2839594C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТРЕХМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ВРАЩАЮЩЕГОСЯ ПО КУРСУ, ТАНГАЖУ И КРЕНУ ОБЪЕКТА ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ | 2006 |
|
RU2327190C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФАЗ КОМПЛЕКСНЫХ ОГИБАЮЩИХ ОТРАЖЕННЫХ СИГНАЛОВ ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ ОБЪЕКТА ДЛЯ ПОЛУЧЕНИЯ ЕГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 2008 |
|
RU2393500C2 |

Изобретение может быть использовано для получения двумерного радиолокационного изображения (РЛИ) объекта в соответствии с разрешающей способностью, достигаемой для заданной полосы частот зондирующего сигнала. Получение РЛИ объекта основывается на способе обработки с помощью преобразования Фурье комплексных огибающих отраженных от объекта сигналов, полученных при многочастотном импульсном зондировании вращающегося объекта, с использованием высокоточных измерений частот, углов наблюдения и координат центра синтезирования на объекте. Достигаемый технический результат заключается в расширении диапазона по величине эффективной площади рассеяния (ЭПР) выделяемых рассевающих центров объекта и обеспечении точности оценки их координат и значений ЭПР в соответствии с разрешающей способностью РЛИ, определяемой заданной полосой частот зондирующего сигнала. Указанный результат обеспечивается за счет определения зависящих от заданной полосы частот размера сектора углов синтезирования, а также пределов и шага изменения значений используемых нелинейных координат (пространственных частот), в области которых размещают измеренные значения комплексных огибающих отраженных от объекта сигналов. 4 ил.
Способ получения двумерного радиолокационного изображения объекта при многочастотном импульсном зондировании, включающий излучение импульсов с изменением несущей частоты f от импульса к импульсу с шагом Δf в полосе частот ΔF, измерение частоты f(tnm) зондирующих импульсов в моменты времени tnm, где n - номер шага перестройки частоты, m - номер повторного цикла перестройки, измерение в земной системе отсчета в моменты времени tnm координат центра антенны радиолокационной станции (РЛС) и координат выбранного центра синтезирования на объекте, измерение относительно земной системы отсчета угла наблюдения ψ(tnm), связанной с объектом системы отсчета с началом в центре синтезирования, прием отраженных сигналов, измерение комплексных огибающих Ф(tnm) отраженных сигналов, корректировку фазы измеренных комплексных огибающих отраженных сигналов к расстоянию от центра антенны РЛС до точки синтезирования, запоминание измеренных комплексных огибающих отраженных сигналов в течение времени синтезирования в угловом секторе, образование двумерной матрицы комплексных огибающих в координатах пространственных частот  ,
,  и преобразование ее с помощью быстрого двумерного преобразования Фурье в двумерную матрицу синтезированных откликов, определение величины порога по уровню первых боковых лепестков наиболее интенсивного отклика, сравнение величин откликов с порогом для выделения превышающих порог элементов матрицы, определение радиолокационного изображения объектов в виде совокупности выделенных элементов матрицы, отличающийся тем, что определяют размер половины сектора углов наблюдения Δψ, исходя из соотношения
и преобразование ее с помощью быстрого двумерного преобразования Фурье в двумерную матрицу синтезированных откликов, определение величины порога по уровню первых боковых лепестков наиболее интенсивного отклика, сравнение величин откликов с порогом для выделения превышающих порог элементов матрицы, определение радиолокационного изображения объектов в виде совокупности выделенных элементов матрицы, отличающийся тем, что определяют размер половины сектора углов наблюдения Δψ, исходя из соотношения  где
где  , fcp - средняя частота в полосе перестройки, запоминают измеренные комплексные огибающие отраженных сигналов в секторе углов наблюдения ±Δψ, заносят в элементы с номерами (n1, m1) двумерной матрицы комплексных огибающих значения, полученные для номера n2 шага перестройки частоты и номера m2 повторного цикла перестройки, где
, fcp - средняя частота в полосе перестройки, запоминают измеренные комплексные огибающие отраженных сигналов в секторе углов наблюдения ±Δψ, заносят в элементы с номерами (n1, m1) двумерной матрицы комплексных огибающих значения, полученные для номера n2 шага перестройки частоты и номера m2 повторного цикла перестройки, где
 ,
,  ,
,
 ,
,  с - скорость света,
с - скорость света,
n1=1,…N1, m1=1,…M1, N1=Lz(max fz - min fz), M1=Lx(max fx - min fx),
Lz, Lx - размеры области синтезирования радиолокационного изображения по продольной z и поперечной х координатам,  ,
,
 ,
,
 ,
,  ,
,
 ,
,  ,
,
 ,
,  .
.

