Изобретение относится к области исследования радиолокационных характеристик объекта и может быть использовано при проведении исследований радиолокационной заметности, оценки эффективности мероприятий по ее снижению, а также для получения исходных данных для решения задач идентификации и распознавания объектов.
Известен способ построения двумерного радиолокационного изобретения (РЛИ) прямолинейно летящей цели при многочастотном узкополосном зондировании [1], основанный на излучении импульсных сигналов, приеме отраженных сигналов и накоплении их в течение рассматриваемого интервала синтезирования Тс. Несущую частоту зондирующих импульсов изменяют от импульса к импульсу по линейному закону в диапазоне частот от ƒ0 до ƒ0+ΔF с шагом ΔF/2N, частоту повторения импульсов Тu выбирают такой, что величина Тu 2N на порядок меньше времени корреляции траекторных нестабильностей полета цели (составляющих 25-100 мс). Накопление отраженных импульсов в объеме 2N2N производят в 2N этапов с интервалами между этапами Tc/2N, составляют матрицу с 2N строками и 2N столбцами, элементами которой являются амплитуды и фазы отраженных сигналов. Матрицу подвергают двумерному быстрому преобразованию Фурье (БПФ). Полученную двумерную спектральную матрицу синтезированных откликов преобразуют в графическое матричное изображение цели, для чего определяют уровень первых боковых лепестков отклика наиболее интенсивного рассеивателя цели, принимают данный уровень за пороговую величину, сравнивают с ней величины откликов спектральной матрицы и в случае превышения порога выделяют соответствующий элемент в матричном поле 2N2N, а совокупность всех выделенных элементов принимают за радиолокационное изображение цели.
Способ обеспечивает построения двумерного РЛИ, ограниченного сектором синтезирования ΔΨ (углов поворота объекта относительно линии визирования).
Недостатком указанного способа является узкая полоса зондирования и получение РЛИ с ограниченным сектором наблюдения.
Наиболее близким техническим решением к заявляемому способу (прототипом) является способ получения двумерного РЛИ объекта в большом диапазоне изменения величин эффективной площади рассеяния (ЭПР) локальных радиолокационных целей (РЦ) с использованием многочастотного импульсного зондирования и синтезирования апертуры антенны [2], включающий излучение радиолокационной станцией (РЛС) сигналов с изменением несущей частоты от импульса к импульсу, измерение ее значения ƒ(tn,m) в моменты времени tn,m, где n - номер шага перестройки частоты в полосе ΔF, m - номер цикла перестройки частот, измерение в земной системе отсчета в моменты времени tn,m, координат центра антенны РЛС и координат выбранного центра синтезирования на объекте, измерение относительно земной системы отсчета угла наблюдения Ψ (tn,m), связанной с объектом системы отсчета с началом в центре синтезирования, прием и измерение комплексных огибающих сигналов Φ(n,m), отраженных от объекта, корректировку их фазы к фиксированному расстоянию от центра антенны РЛС до точки синтезирования, запоминание комплексных огибающих, отраженных от объекта сигналов в течение времени синтезирования в угловом секторе ΔΨ, образование из них двумерной матрицы в координатах пространственных частот и преобразование ее с помощью БПФ в двумерную матрицу синтезированных откликов объекта, определение величины порога по уровню первых боковых лепестков наиболее интенсивного отклика, сравнение уровня синтезированных откликов объекта с порогом для выделения элементов матрицы, представляющих двумерное РЛИ объекта в секторе углов наблюдения.
Указанный способ обеспечивает высокую разрешающую способность двумерного РЛИ объекта в соответствии с заданной полосой частот зондирующего сигнала, с учетом свойств радиопрозрачности объекта и сектора углов наблюдения.
Недостатком указанного способа (прототипа) является ограниченность получения двумерного РЛИ объекта, которая обусловлена сектором углов наблюдения. Из-за большого диапазона неравномерности функции рассеяния, ограничений, накладываемых радиопрозрачностью объекта, способ не позволяет получить панорамное РЛИ объекта, чаще всего это отображение нескольких блестящих точек объекта.
Под панорамным РЛИ объекта понимается проекция функции рассеяния (блестящих точек) объекта на горизонтальную плоскость, при изменении угла наблюдения в пределах 2π, а ее интенсивность пропорциональна градациям яркости (цвета) изображения. [3].
Технический результат предлагаемого способа заключается в построении панорамного РЛИ объекта с одновременным сохранением точностных характеристик измерения координат блестящих точек объекта.
Технический результат достигается тем, что в известном способе, включающем излучение РЛС сигналов с изменением несущей частоты от импульса к импульсу, измерение ее в моменты времени, соответствующие шагу и циклу перестройки частот, измерение координат центра антенны РЛС, координат выбранного центра синтезирования на объекте, угла наблюдения в земной системе координат, прием и запоминание комплексных огибающих сигналов, отраженных от объекта в угловом секторе синтезирования, корректировку их фазы к фиксированному расстоянию от центра антенны РЛС до точки синтезирования, образование матрицы комплексных огибающих сигнала в координатах пространственных частот, преобразование ее с помощью двумерного БПФ в матрицу синтезированных откликов в системе координат площади синтезирования, дополнительно создают множество матриц синтезированных откликов в системе координат площади синтезирования, которые смещены между собой на дискретный угол за счет равномерного поворота объекта относительно геометрического центра площади синтезирования, формируют блок матриц синтезированных откликов, путем преобразования их к системе координат объекта, фиксируют матрицу панорамного радиолокационного изображения объекта как результат отображения максимальных значений одинаковых элементов матриц блока.
Сравнительный анализ показывает, что предложенный способ отличается от известного наличием новых действий по формированию множества матриц синтезированных откликов и синтез их в результирующую матрицу панорамного РЛИ объекта.
При изучении других известных решений в данной области техники указанная совокупность признаков, отличающих изобретение от прототипа, не была выявлена, что указывает, по мнению заявителя, на «новизну» заявленного изобретения.
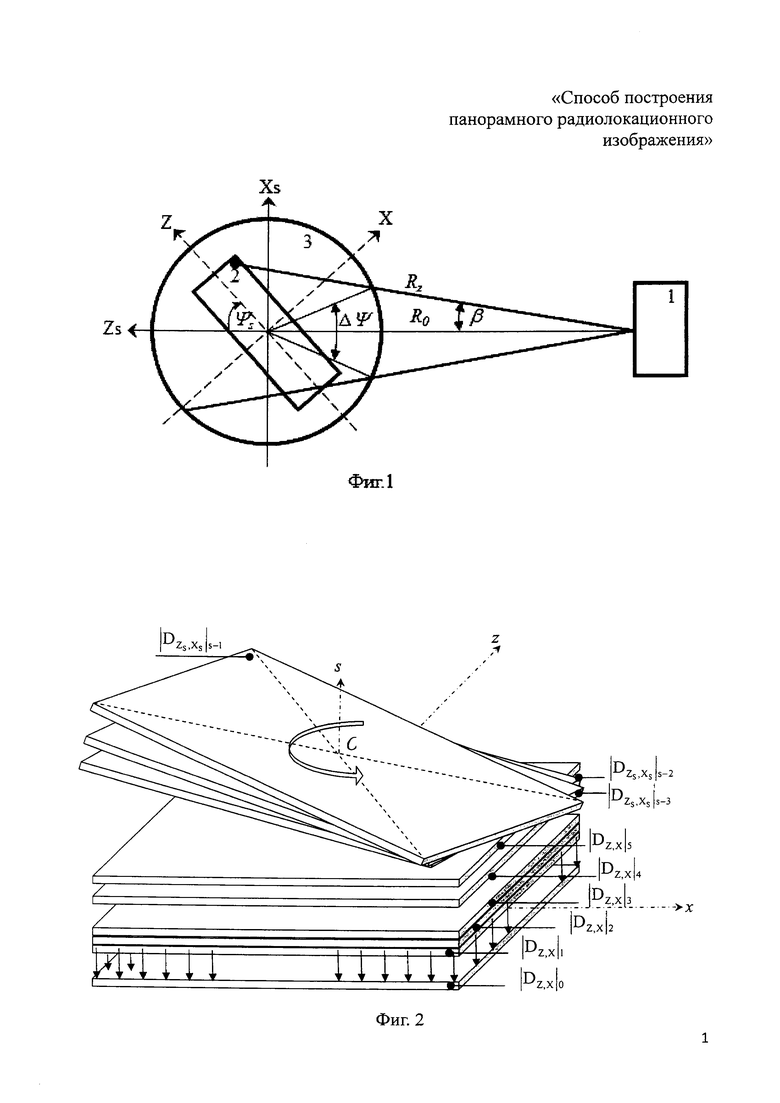
На фиг. 1 приведена схема устройства реализации предложенного способа в составе: 1 - радиолокационная станция; 2 - объект; 3 - поворотная платформа.
На фиг. 2 представлен рисунок, поясняющий формирование матрицы двухмерного панорамного РЛИ.
На фиг. 3 и фиг. 4 представлены двухмерные РЛИ объекта типа «транспортная база» с углов наблюдения 225° и 125° соответственно, полученные в ходе реализации предложенного способа.
На фиг. 5 представлено панорамное РЛИ объекта типа «транспортная база», полученное в ходе реализации предложенного способа.
На фиг. 6 представлен габаритный чертеж вида сверху объекта типа «транспортная база».
Сущность предлагаемого способа заключается в том, что создают множество матриц синтезированных откликов в системе координат площади синтезирования, которые смещены между собой на дискретный угол за счет равномерного поворота объекта относительно геометрического центра площади синтезирования, формируют блок матриц синтезированных откликов путем преобразования их к системе координат объекта, фиксируют матрицу панорамного радиолокационного изображения объекта как результат отображения максимальных значений одинаковых элементов матриц блока.
Панорамное РЛИ объекта представляет собой синтез реконструкции множества двухмерных РЛИ на основе алгоритмов обратного проецирования Радона [4]. Основой построения панорамного РЛИ объекта является построение его двумерного РЛИ в секторе углов наблюдения, которое выполняется в соответствии с алгоритмом прототипа.
Построение панорамного РЛИ дополняется отличительными признаками от алгоритма прототипа, в части построения множества двумерных РЛИ объекта в секторе дискретных углов наблюдения ΔΨ≤Ψ≤2π и их синтез в панорамное РЛИ.
Алгоритм построения панорамного РЛИ включает:
1) Объект равномерно поворачивают на угол ΔΨ≤Ψ≤2π относительно геометрического центра площади синтезирования, фиг. 1.
2) Излучают РЛС сигналы с изменением несущей частоты от импульса к импульсу и ее измерения ƒ(tn,m) в моменты времени tn,m, где n и m - номера шага перестройки и цикла перестройки частот соответственно.
3) Измеряют координаты центра антенны РЛС, координат выбранного центра синтезирования на объекте и угла наблюдения Ψ(tn,m) в системе координат площади синтезирования, фиг. 1.
4) Регистрируют двумерный массив комплексных огибающих отраженных от объекта сигналов Φ(Ψ, ƒ) в секторе изменения угла наблюдения ΔΨ≤Ψ≤2π и значений частоты ƒ(tn,m) сигналов в моменты времени, соответствующие n - шагу и m - циклу ее перестройки.
5) Выделяют множество массивов комплексных огибающих отраженных от объекта сигналов, ограниченных сектором синтезирования ΔΨ и смещенных между собой на дискретный угол Ψs=sδ:

где s=0, 1, 2… - порядковый номер значений дискретных углов наблюдения (массивов);
δ - шаг дискретизации угла наблюдения.
6) Образование множества матриц комплексных огибающих отраженных от объекта сигналов в координатах пространственных частот:

где [TNz, Mx] - матрица индексов пространственных частот Nz(n, z), Мх(m, х) [5].
7) Корректируют фазы комплексных огибающих сигналов к фиксированному расстоянию R0 от центра антенны РЛС до точки синтезирования:

где k(Rz/R0) - коэффициент корректировки фаз комплексных огибающих сигналов, фиг. 1;
Rz - расстояние между центром антенны РЛС и точками синтезирования на объекте;
R0 - расстояние между центрами антенны РЛС и поворотной платформы.
8) Преобразование с помощью двумерного БПФ комплексных огибающих отраженных от объекта сигналов в синтезированные отклики:

где F{•} - операция двумерного БПФ.
Синтезированный отклик - реакция системы, реализующей алгоритм преобразования, на воздействие комплексных огибающих многочастотных сигналов [6].
9) Формируют блок матриц синтезированных откликов - преобразование множества матриц к системе координат объекта, фиг. 2:

где L(Ψs) - оператор линейного преобразования координат (Zs, Xs)→(Z, X) при повороте системы вокруг начала на угол Ψs [7];
10) Формируют матрицы панорамного РЛИ объекта путем отображения максимальных значений одинаковых элементов матриц блока, фиг. 2:

Отображение максимальных значений одинаковых элементов матриц блока объясняется тем, что промежуточные значения элементов матриц представляют некоррелированный ансамбль случайных реализаций зависимости функции рассеяния от дискретного угла наблюдения Ψs, а диапазон изменения их уровней содержится в максимальном значении ΔDZs-1, Zs-1 ⊂ maxs⎜DZs, Xs⎜ в виде полутонов (цветов) РЛИ.
Выходными данными алгоритма являются проекция максимальных значений функции рассеяния (блестящих точек) объекта на горизонтальную плоскость, при изменении угла наблюдения в пределах 2π, а ее интенсивность пропорциональна градациям яркости (цвета) РЛИ.
Использование алгоритма прототипа обеспечивает сохранения точностных характеристик измерения координат блестящих точек объекта, а алгоритм построения панорамного РЛИ обеспечивает получение одинаковых разрешающих способностей по ортогональным координатам и привязку отдельных центров рассевания на объекте к его конфигурации, при этом качество панорамного РЛИ объекта определяется шагом дискретизации угла наблюдения Ψs. Предлагаемый способ устраняет недостатки прототипа - ограниченность двумерного РЛИ объекта сектором угла наблюдения.
Предлагаемый способ построения панорамного РЛИ объекта промышленно применим, а для его реализации могут быть использованы современные радиолокационные измерительные комплексы (РИК) с многочастотным зондированием сигнала и синтезирования апертуры антенны. Пример реализации способа с помощью РИК представлен на фиг. 5.
Предлагаемый способ позволяет сопоставлять РЛИ объекта с его конфигурацией, выявлять элементы конструкции, образующие блестящие точки, решать задачи распознавания форм и размеров объекта, проводить их классификацию, фиг. 5, фиг. 6.
Список использованных источников
1. Патент Российской Ф на изобретение №2099743 «Способ построения двумерного радиолокационного изображения прямолинейно летящей цели при многочастотном узкополосном зондировании». МПК G01S 13/89, опубл. 20.12.1997 г.
2. Патент Российской Федерации на изобретение №2422851 «Способ получения двумерного радиолокационного изображения объекта при многочастотном импульсном зондировании». МПК G01S 13/89, опубл. 27.06.2011 г.
3. Беляев В.В., Кирьянов О.Е., Понькин В.А. Радиолокационные, антенные и радиофизические измерения. Монография - Воронеж: Издательско-полиграфический центр «Научная книга», 2013 г., стр. 81-105.
4. http://ru.Wikipedia,arg/Wiki, 06.10.2014 г.
5. Методы исследования радиолокационных характеристик объектов. Монография под ред. С.В. Ягольникова. - М.: Радиотехника, 2012 г., стр. 172-185.
6. Радиолокационные станции с синтезированием апертуры антенны. В.Н. Антипов, В.Т. Гориянов, А.И. Кулин и др. - М.: Радио и связь, 1988 г., стр. 8-64.
7. http://zhukovsd.blogspot.ru/2010/04/blog-post.html, 06.10.2014 г.

Изобретение относится к области исследования радиолокационных характеристик объекта и может быть использовано при проведении исследований радиолокационной заметности, оценки эффективности мероприятий по ее снижению, а также для получения исходных данных для решения задач идентификации и распознавания объектов. Достигаемый технический результат - построение панорамного радиолокационного изображения объекта с одновременным сохранением точностных характеристик измерения координат блестящих точек объекта. Сущность способа заключается в том, что создают множество матриц синтезированных откликов в системе координат площади синтезирования, смещенных между собой на дискретный угол, за счет равномерного поворота объекта относительно геометрического центра площади синтезирования, формируют блок матриц синтезированных откликов путем преобразования их к системе координат объекта, фиксируют матрицу панорамного радиолокационного изображения объекта как результат отображения максимальных значений одинаковых элементов матриц блока. 6 ил.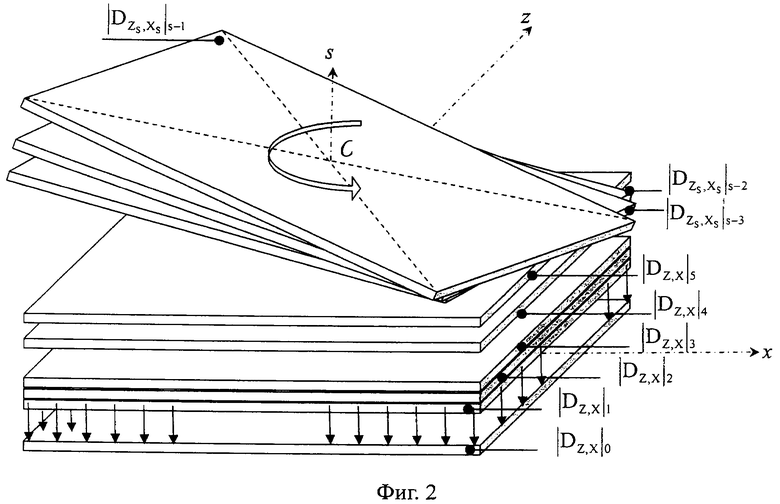
Способ построения панорамного радиолокационного изображения объекта, включающий излучение радиолокационной станцией сигналов с изменением несущей частоты от импульса к импульсу, измерение ее в моменты времени, соответствующие шагу и циклу перестройки частот, измерение координат центра антенны радиолокационной станцией, координат выбранного центра синтезирования на объекте, угла наблюдения в системе координат площади синтезирования, прием и запоминание комплексных огибающих сигналов, отраженных от объекта в угловом секторе синтезирования, корректировку их фазы к фиксированному расстоянию от центра антенны радиолокационной станции до точки синтезирования, образование матрицы комплексных огибающих сигнала в координатах пространственных частот, преобразование ее с помощью двумерного быстрого преобразования Фурье в матрицу синтезированных откликов в системе координат площади синтезирования, отличающийся тем, что создают множество матриц синтезированных откликов в системе координат площади синтезирования, смещенных между собой на дискретный угол, за счет равномерного поворота объекта относительно геометрического центра площади синтезирования, формируют блок матриц синтезированных откликов путем преобразования их к системе координат объекта, фиксируют матрицу панорамного радиолокационного изображения объекта как результат отображения максимальных значений одинаковых элементов матриц блока.

