Изобретение относится к области исследования радиолокационных характеристик объекта при использовании многочастотного импульсного зондирования и метода инверсного синтезирования апертуры антенны.
Методы получения радиолокационного изображения (РЛИ) основаны на цифровой обработке комплексных огибающих отраженных сигналов, измеренных в широкой полосе частот зондирующих импульсов РЛС при различных ракурсах визирования объекта.
Комплексная огибающая отраженного от объекта сигнала есть

где а - амплитуда отраженного сигнала,
R - расстояние от РЛС до объекта,
λ - длина волны зондирующего сигнала,
φотр - скачок фазы, возникающий при отражении от объекта.
Модель исследуемого объекта - совокупность локальных рассеивающих центров (РЦ), у которых эффективная площадь рассеивания (ЭПР) при величине λ, изменяющейся в относительно небольшой полосе |Δλ|≤0,15 λср, где λср - средняя в полосе перестройки длина волны, а также координаты в связанной с объектом системе отсчета являются постоянными.
Известен триангуляционный способ построения двумерного РЛИ цели в РЛС сопровождения с инверсным импульсным синтезированием апертуры [1], в котором при узкополосном импульсном зондировании цели измеряют и запоминают комплексные огибающие отраженных сигналов, их подвергают одномерному преобразованию Фурье и формируют одномерный доплеровский портрет цели путем измерения доплеровской частоты i-го РЦ и пересчета ее в линейное удаление РЦ от линии визирования цели rψ в направлении перпендикуляра к плоскости, проходящей через линию визирования и ось относительного вращения цели при ее сопровождении, величины rψ определяют для двух ракурсов сопровождения цели, разнесенных по углу визирования на интервал Δψ=0,5°, по данным rψ1, rψ2, зафиксированным при углах ψ1, ψ2, определяют координату rd в направлении линии визирования и по координатам
rψ, rd, полученным для каждого i-го РЦ, строят РЛИ цели.
Указанному способу присущи существенные недостатки:
координата rd при малых секторах (ψ2-ψ1) может быть определена только с большой погрешностью; при узкополосном зондировании разрешение РЦ является плохим; имеют место значительные трудности при идентификации образов РЦ, полученных в портретах при различных углах визирования цели. Что же касается важного для практики параметра - величины ЭПР отдельных РЦ, то в рассмотренном способе оценка его при малых секторах углов (ψ2-ψ1) является грубой.
Известен [2] способ построения двумерного РЛИ прямолинейно летящей цели при многочастотном узкополосном зондировании, основанный на излучении импульсных сигналов, приеме отраженных сигналов и накоплении их в течение рассматриваемого интервала синтезирования Tc, отличающийся тем, что несущую частоту зондирующих импульсов изменяют от импульса к импульсу по линейному закону в диапазоне частот от f0 до f0+ΔF с шагом ΔF/2N, частоту повторения импульсов Ти выбирают такой, что величина Ти 2N на порядок меньше времени корреляции траекторных нестабильностей полета цели (составляющих 25-100 мс), накопление отраженных импульсов в объеме 2N2N производят в 2N этапов с интервалами между этапами Тс/2N, составляют матрицу с 2N строками и 2N столбцами, элементами которой являются амплитуды и фазы отраженных сигналов, матрицу подвергают двумерному быстрому преобразованию Фурье, полученную двумерную спектральную матрицу синтезированных откликов преобразуют в графическое матричное изображение цели, для чего определяют уровень первых боковых лепестков отклика наиболее интенсивного рассеивателя цели, принимают данный уровень за пороговую величину, сравнивают с ней величины откликов спектральной матрицы и в случае превышения порога выделяют соответствующий элемент в матричном поле 2N2N, а совокупность всех выделенных элементов принимают за радиолокационное изображение цели.
Описанный способ взят в качестве прототипа.
Указанный способ обеспечивает получение двумерного РЛИ, характеризуемого координатами в радиальном rd и азимутальном rψ направлениях. При этом координаты rd являются результатом преобразования во временную область спектра отраженного сигнала, размещенного в столбцах матрицы.
Величина rd по существу является проекцией на линию визирования расстояния от РЦ до центра синтезирования. Другая координата rψ, получающиеся в результате преобразования Фурье строк матрицы, образованной после преобразования Фурье столбцов, является расстоянием от РЦ до плоскости, проходящей через линию визирования и ось вращения цели [3].
Недостатком указанного способа является ухудшение разрешающей способности и падение точности оценки координат и ЭПР РЦ при расширении сектора синтезирования Δψ (углов поворота объекта относительно линии визирования) сверх некоторой величины, ограниченной единицами угловых градусов.
Расширение этого сектора теоретически должно приводить к повышению разрешающей способности и точности оценок [4]. Однако в рассматриваемом способе этого не происходит из-за того, что координаты rψ, rd изменяются при вращении объекта, а процесс синтезирования дает их усредненную оценку. Изображение РЦ расфокусируется, падает разрешающая способность - вследствие этого способ не может обеспечить высокой точности определения координат и ЭПР РЦ, особенно в большом диапазоне изменения ЭПР РЦ.
Сущность предлагаемого изобретения заключается в следующем.
Способ решает задачу получения двумерного РЛИ объекта, обеспечивающего повышение разрешающей способности и точности определения координат и ЭПР РЦ в широком диапазоне изменения их ЭПР.
Требования к диапазону разрешаемых ЭПР РЦ в настоящее время составляет 20 дБ и более.
Технический результат, состоящий в повышении разрешающей способности в широком диапазоне изменения ЭПР РЦ и повышении точности оценки координат и ЭПР РЦ, достигается благодаря измерению с повышенной точностью частоты f сигнала и угла курса ψ объекта, являющихся параметрами процесса синтезирования РЛИ, в значительной мере определяющими качество РЛИ; реализации процесса синтезирования в виде свертки функции комплексных огибающих отраженных сигналов со специальной опорной функцией для повышения фокусировки РЛИ; использовании криволинейных координат fx, fz для устранения нелинейного влияния угла ψ на процесс синтезирования; оценивании в процессе синтезирования координат РЦ в связной системе отсчета (где они постоянны) для повышения точности оценивания; уточнении полученных из РЛИ оценок координат РЦ за счет использования информации об энергии комплексных огибающих; использовании уточненных координат РЦ и полученных из РЛИ оценок ЭПР РЦ для коррекции матрицы комплексных огибающих с целью изъятия из нее информации о группе РЦ с большими ЭПР, что позволяет перенести диапазон разрешаемых при синтезировании РЦ в сторону РЦ с малыми ЭПР; повторной реализации процесса синтезирования со скорректированной матрицей комплексных огибающих для получения РЛИ с малыми значениями ЭПР РЦ.
Для достижения указанного технического результата в способе получения двумерного РЛИ объекта в большом диапазоне изменения величин ЭПР локальных РЦ при многочастотном импульсном зондировании, включающем излучение импульсов с изменением несущей частоты от импульса к импульсу с шагом Δf в полосе частот ΔF, прием отраженных сигналов, измерение комплексных огибающих Ф отраженных сигналов и запоминание их в течение времени синтезирования в угловом секторе Δψ, образование матрицы комплексных огибающих и преобразование ее с помощью быстрого двумерного преобразования Фурье в матрицу синтезированных откликов, определение величины порога по уровню первых боковых лепестков наиболее интенсивного отклика, сравнение величин откликов с порогом для выделения превышающих порог элементов матрицы, совокупность которых принимают за РЛИ объекта, в котором по положению выделенных откликов в матрице синтезированных откликов определяют значения координат, а по величинам квадратов модулей откликов определяют значения ЭПР рассеивающих центров,
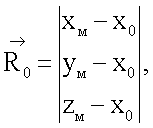
измеряют частоту f(tnm) зондирующих импульсов, момент времени tnm запоминают, где n - номер шага перестройки частоты, m - номер цикла перестройки (номер повторной перестройки), измеряют в земной системе отсчета координаты фазового центра антенны РЛС x0, у0, z0 и координаты xм(tnm), yм(tnm), zм(tnm) точки М на объекте, выбранной в качестве центра синтезирования, измеряют относительно земной системы отсчета угол курса ψ(tnm) связанной с объектом системы отсчета с началом в точке М, вычисляют пространственные частоты
fx(tnm)=-2f(tnm)/c·sin(ψ(tnm)-ψ0),

где с - скорость света,
ψ0 - угол между линией, соединяющей фазовый центр антенны РЛС с центром синтезирования, и осью z земной системы отсчета,
фазы измеренных значений комплексных огибающих Ф(tnm) отраженных сигналов корректируют на величину 4πf(tnm)/c·R0(tnm),
где R0(tnm) - расстояние от фазового центра антенны РЛС до точки синтезирования М,
полученные после коррекции значения комплексных огибающих Ф*(tnm) размещают в элементы матрицы T(k,l), двумерные номера (k,l), которых определяют по формулам

где int [•] - функция определения целой части числа,
d - шаг элементов матрицы Т по координатам fx, fz,
матрицу T(k,l) подвергают двумерному дискретному преобразованию Фурье

и по полученной двумерной матрице синтезированных откликов g(x,z) определяют двумерное радиолокационное изображение объекта, задают величину ρ порога разрешения по величине ЭПР рассеивающих центров и для элементов матрицы g(x,z), у которых квадрат модуля |g(x,z)|2 превышает порог ρ, определяют оценки координат xi *, zi *,  и оценки ЭПР σi * выделенных РЦ, координаты xi *, zi * уточняют путем поиска в окрестности каждого выделенного РЦ координат xi **, zi **, дающих минимум по переменным х, z функции энергии
и оценки ЭПР σi * выделенных РЦ, координаты xi *, zi * уточняют путем поиска в окрестности каждого выделенного РЦ координат xi **, zi **, дающих минимум по переменным х, z функции энергии

где 
R(x,z) - расстояние от фазового центра антенны РЛС до точки объекта с координатами x, z из окрестности выделенного i-го РЦ,
и по полученным оценкам ЭПР σi* и уточненным значениям координат xi **, zi ** выделенных РЦ определяют корректирующие поправки для комплексных огибающих

скорректированную матрицу комплексных огибающих со значениями ее элементов

подвергают двумерному дискретному преобразованию Фурье

и по полученной двумерной матрице g*(x,z) синтезированных откликов определяют двумерное радиолокационное изображение объекта для рассеивающих центров с величинами эффективных площадей рассеивания, меньшими, чем заданный порог ρ.
Из приведенной совокупности существенных признаков предлагаемого способа следует, что общим с прототипом являются признаки излучения зондирующих импульсов с изменением несущей частоты от импульса к импульсу с шагом Δf в полосе частот ΔF, приема отраженных сигналов, измерения комплексных огибающих отраженных сигналов, запоминания их в течение времени синтезирования в угловом секторе Δψ, образования матрицы комплексных огибающих и преобразования ее с помощью двумерного быстрого преобразования Фурье в матрицу синтезированного отклика, определения уровня первых боковых лепестков отклика наиболее интенсивного рассеивателя, определения пороговой величины, равной данному уровню, сравнения с ней значений элементов матрицы, выделения элементов матрицы по условию превышения порога, определения радиолокационного изображения в виде совокупности выделенных элементов матрицы, и определения для них оценок координат и ЭПР РЦ.
Признаки образования матрицы комплексных огибающих и преобразования с помощью двумерного быстрого преобразования Фурье являются общими с прототипом только формально.
По существу же в прототипе элементы матрицы комплексных огибающих размещаются в поле переменных f, ψ; причем дискрет изменения переменных должен быть постоянным (об этом в прототипе умалчивается) для того, чтобы можно было определять rd, rψ с помощью двух одномерных преобразований Фурье - сначала столбцов, затем строк матрицы. И здесь автор ошибочно употребляет понятие двумерного преобразования Фурье - в двумерном преобразовании операции со строками и столбцами матрицы переставимы, в прототипе же требуется вначале преобразование столбцов, а затем строк.
В предлагаемом способе речь идет именно о двумерном преобразовании Фурье. Причем элементы Ф(tnm) матрицы комплексных огибающих, будучи равномерно распределенными в поле переменных f, ψ, получают неравномерное распределение в поле fx, fz. Этот факт является важным для практики: в предлагаемом способе не требуется равномерного вращения объекта по углу ψ, а также не требуется использования постоянного шага Δf при перестройке частот зондирующих импульсов.
Остальные вышеуказанные признаки предлагаемого способа являются отличительными.
Описание предлагаемого способа заключается в следующем.
Оператор синтезирования РЛИ, являющийся инструментом оценки неизвестных параметров (координат и ЭПР РЦ), при использовании метода максимального правдоподобия должен представлять собой интеграл свертки комплексных огибающих Ф(q), зарегистрированных в координатах вектора q, изменяющегося в интервале Δq, с опорной функцией F(q, x):
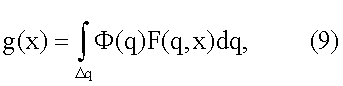
где вектор x является совокупностью неизвестных координат и ЭПР РЦ.
Опорная функция в соответствии с [5] является комплексной огибающей отраженного сигнала фиктивного РЦ, координаты x, y, z которого в связной системе отсчета произвольны:

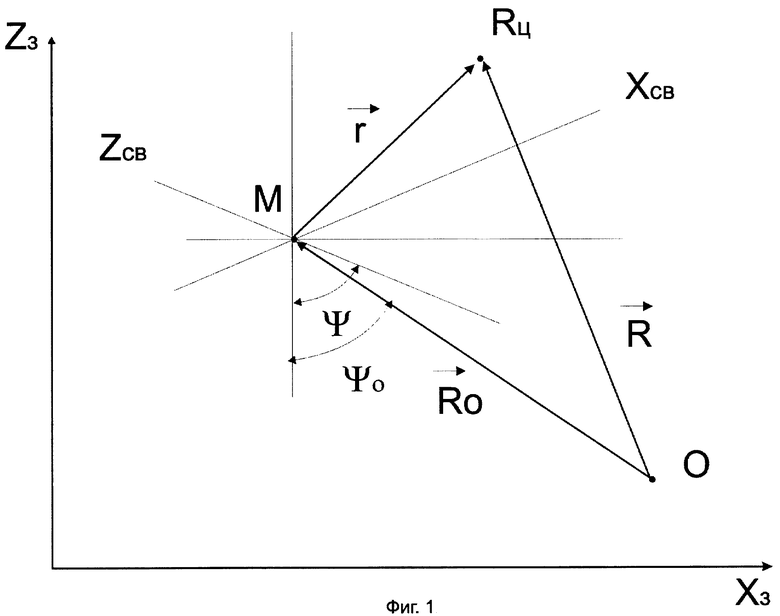
где R0, R - расстояния от фазового центра РЛС (точка О) до центра синтезирования (точка М) и до указанного фиктивного РЦ.
Взаимное положение точек О, М, РЦ показано на фиг.1,
где Хз, Zз и Хсв, Zсв - оси координат земной и связанной систем отсчета.
В связанной системе отсчета вектор  есть
есть
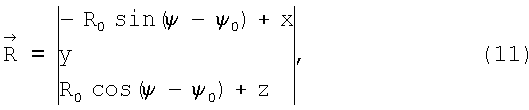
где 



где ψ0 - угол ориентации линии визирования (линии, соединяющей фазовый центр антенны РЛС с центром синтезирования на объекте) относительно оси z земной системы отсчета.
При R0/R≈l соотношение (10) преобразуется к виду:

где fx=-2/λsin(ψ-ψ0), fz=2/λcos(ψ-ψ0) - пространственные частоты.
Тогда оператор синтезирования (9) для приведенных к центру синтезирования комплексных огибающих

выражается в виде:

где Ф*(fx, fz) - значения Ф(tnm), размещенные в области переменных fx, fz.
В выражении (16) третий сомножитель в процессе синтезирования (при изменении ψ, λ) изменяется мало.
Действительно, при R0=900 м, λ=3 см в диапазоне изменения λ, равном ±0,15λ, для РЦ, удаленных от центра синтезирования на 1 м (т.е. при (х2+у2+z2)0,5=1 м), величина
φ3=4π/λ·(х2+у2+z2)/(2R0) изменяется не более чем на ±2° от ее среднего значения (при Δλ=0).
А для РЦ с удалением от центра синтезирования на 3 м изменение φ3 составляет ±18°.
Поскольку ошибки измерения фаз комплексных огибающих Ф* на практике укладываются в интервале ±30°, то влиянием на процесс синтезирования третьего сомножителя в (16) можно пренебречь при указанных выше значениях дальности РЛС - объект R0 и размера объекта (х2+у2+z2)0,5.
И тогда оператор синтезирования РЛИ (16) становится двумерным преобразованием Фурье

Измерения Ф* производят при дискретных значениях f, ψ, вследствие этого преобразование (17) должно быть представлено в дискретной форме. Для этого переменные интегрирования fx, fz заменяют номерами элементов двумерной матрицы Т

где int [•] - функция определения целой части числа,
d - шаг построения элементов матрицы.
Поскольку диапазон изменения координат fx, fz одинаков и равен ±2fmax/c, где fmax - максимальное значение частоты в полосе ΔF ее перестройки, то величина d может быть выбрана одинаковой для fx и fz.
На практике выбор величины d можно производить исходя из условия недопущения повторного размещения значений Ф*(tnm) в элементы матрицы Т. При этом задают размерность К матрицы Т, размещают величины Ф*(tnm) в элементы матрицы и фиксируют события повторного размещения. Если таковые есть, то размер матрицы увеличивают вдвое и т.д.
Опыт моделирования показывает, что размерность К матрицы Т в области переменных fx, fz является в 2÷4 раза большим, чем в области переменных f, ψ.
При дискретизации переменных fx, fz преобразование (17) в дискретной форме выражается в виде суммы

являющейся двумерным дискретным преобразованием Фурье.
Если размерность матрицы Т удовлетворяет условию К=2P, где p - целое число, то реализация (19) выполняется с помощью быстрого двумерного дискретного преобразования Фурье.
После реализации алгоритма синтезирования (19) в полученном РЛИ выделенные по превышению порога элементы матрицы синтезированного отклика содержат информацию о координатах x, z и об ЭПР рассеивающих центров σ.
Координаты выделенных РЦ определяются по двумерному номеру отклика в матрице синтезированных откликов, а величины ЭПР РЦ - по квадрату модуля отклика, который применительно к способу-прототипу пропорционален величине σ, полосе перестройки зондирующих сигналов ΔF и интервалу времени синтезирования [6].
Моделирование показывает, что при достижимом в настоящее время уровне значений ошибок измерения амплитуды (δΔ/A≤0,5÷1 дБ) и фазы (δφ≤30°) комплексных огибающих отраженных от объекта сигналов в диапазоне перестройки частоты зондирующих импульсов от 8500 до 11500 МГц, ошибок измерения координат центра синтезирования δх, δz≤2 мм и угла курса δψ<3' синтезирование в секторе Δψ=16° обеспечивает получение оценок координат x, z и ЭПР σ РЦ с ошибками
δх, δz≤5 см, δA/А=1 дБ.
Однако это выполняется только для тех РЦ, чьи величины ЭПР находятся в диапазоне 0÷-12 дБ от уровня максимального значения ЭПР этих РЦ.
Вероятность правильного выделения (идентификации) РЦ с малыми значениями ЭПР (σ≤-12÷-20 дБ) падает от 1 при σ=-12 дБ до 0 при σ=-20 дБ.
Для расширения диапазона ЭПР правильно идентифицируемых РЦ и нахождения оценок их координат и ЭПР в предлагаемом способе информация об идентифицированных в процессе синтезирования РЦ с большими ЭПР (в диапазоне 0÷-12 дБ) изымается из исходной матрицы Т комплексных огибающих и производится повторное синтезирование с использованием скорректированной матрицы комплексных огибающих.
Однако эффективность такой коррекции существенно зависит от точности определения оценок координат РЦ.
Моделирование показывает, что используемое здесь преобразование Фурье комплексных огибающих Ф* не реализует потенциальную точность, определяемую информацией матрицы Т. По крайней мере, точность оценок координат x, z идентифицированных (выделенных) РЦ может быть увеличена более, чем на порядок.
Достигается это применением дополнительной обработки данных, полученных в результате синтезирования РЛИ с матрицей Т. Суть ее состоит в следующем.
Задается порог ρ разрешения по ЭПР для РЦ с большими значениями ЭПР. Выделяется РЦ, чьи ЭПР превысили порог, определяются координаты выделенных РЦ xi ∗, zi ∗ и их ЭПР σi ∗. Пусть количество выделенных РЦ составило I, для каждого выделенного i-го РЦ ( ) производится уточнение координат. В окрестности точки xi ∗, zi ∗ создается область Gi(x, z) с центром в точке xi ∗, zi ∗ и радиусом δ=5÷10 см. В области Gi задается множество точек x, z с удалением друг от друга на расстоянии, меньшем δ·10-2.
) производится уточнение координат. В окрестности точки xi ∗, zi ∗ создается область Gi(x, z) с центром в точке xi ∗, zi ∗ и радиусом δ=5÷10 см. В области Gi задается множество точек x, z с удалением друг от друга на расстоянии, меньшем δ·10-2.
Каждая из точек x, z области G проверяется на возможность нахождения в ней выделенного РЦ.
Для этого определяются комплексные огибающие Фi(tnm), создаваемые фиктивным РЦ с координатами x, z и ЭПР σi ∗ для имеющегося множества измеренных значений f(tnm), ψ(tnm):

где R(x, z) - дальность от фазового центра антенны РЛС до точки (x, z) области G.
Комплексные огибающие отраженных сигналов от объекта, в котором удален РЦ с параметрами x, z, σi ∗, находятся как

Энергия процесса, представленного всей совокупностью комплексных огибающих Фi ∗(tnm) при n= и m=
и m= , есть:
, есть:

Величина Эi(σ∗, x, z) находится для всех точек x, z области Gi(x, z). Точка x∗, z∗, в которой достигается min Эi(σ∗, x, z) по переменным x, z, берется в качестве уточненной оценки местоположения выделенного i-го РЦ:

Реализация описанной процедуры позволяет уменьшить ошибки определения координат выделенных РЦ до 1-2 мм.
Установленные координаты i-ых выделенных РЦ xi∗∗, zi ∗∗ и оценки их ЭПР σi ∗ используется для удаления информации о выделенных РЦ из матрицы комплексных огибающих.
Действительно, вклад i-го РЦ с координатами xi, zi и ЭПР σi в комплексную огибающую отраженного сигнала на частоте зондирования fn в момент времени tnm есть:

где R(xi, zi) - расстояние от фазового центра антенны РЛС до точки объекта с координатами xi, zi в момент времени tnm.
Это выражение в соответствии с (14) преобразуется к виду

Если известны оценки xi ∗∗, zi ∗∗, σi ∗ для  , то при изъятии из матрицы Т информации об i-х РЦ элементы матрицы Т корректируется на величину
, то при изъятии из матрицы Т информации об i-х РЦ элементы матрицы Т корректируется на величину

Скорректированные значения комплексных огибающих есть:

Выражения (26), (27) в области переменных k, 1 запишутся как


Реализация процесса синтезирования РЛИ по данным скорректированных значений комплексных огибающих (29) производится с помощью преобразования (19).
Полученную в результате этого (повторного) преобразования матрицу синтезированных откликов преобразуют в графическое матричное изображение, в котором диапазон изменения ЭПР РЦ перенесен в область малых значений ЭПР. При этом становится возможно выделить РЦ с малыми значениями ЭПР, оценить величины координат и ЭПР этих РЦ, чего нельзя было сделать при синтезировании РЛИ по данным исходной (некорректированной) матрицы комплексных огибающих.
Построение РЛИ, основанное на использовании предлагаемого способа, проведено методом моделирования.
Задавалась модель объекта в виде совокупности неподвижных относительно связанной системы отсчета РЦ.
Зондирующие сигналы РЛС - импульсы с периодом повторения 20 мкс. Несущая частота сигнала изменялась от импульса к импульсу с шагом Δf=3000/511 МГц в полосе частот от 8500 до 11500 МГц.
Объект вращался по курсу со скоростью 12°/с.
Сектор синтезирования Δψ=16°.
РЦ в количестве 30 располагались тремя изолированными группами с удалением соседних РЦ на 40 см.
Величины σ ЭПР РЦ (или амплитуды отраженных от РЦ сигналов, равные  ) задавались равными 0,1 м2; 0,01 м (-10 дБ относительно 0,1 м2) и 0,001 м 2 (-20 дБ).
) задавались равными 0,1 м2; 0,01 м (-10 дБ относительно 0,1 м2) и 0,001 м 2 (-20 дБ).
В каждой группе имелись РЦ с большими, средними и малыми значениями ЭПР.
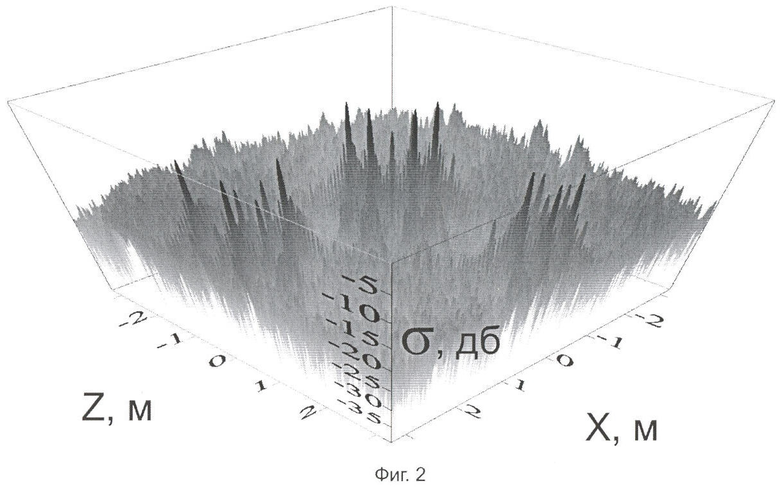
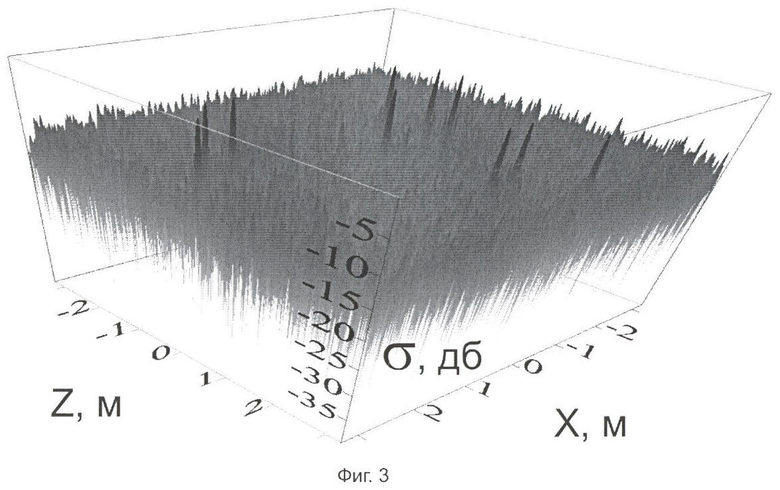
На фиг.2 приведено двумерное РЛИ, полученное при использовании исходной (некомпенсированной) матрицы комплексных огибающих отраженных сигналов, а на фиг.3 - двумерное РЛИ, полученное после компенсации информации о РЦ с ЭПР, имеющими 0 и - 10 дБ. Максимальные значения ошибок оценок координат и ЭПР компенсируемых РЦ составляли σх, σz≤2 мм, δA/А=1 дБ.
В РЛИ на фиг.2 РЦ с малыми значениями ЭПР (σ=-20 дБ) теряются на фоне изображения.
В РЛИ на фиг.3 указанные РЦ становятся доступными для идентификации.
Технический результат достигнут - устранены недостатки прототипа, а именно: повышена точность определения координат и ЭПР РЦ, а также расширен диапазон изменения ЭПР рассеивающих центров, выделяемых при получении РЛИ.
Использованные источники информации
1. Триангуляционный способ построения двумерного РЛИ цели в РЛС сопровождения с инверсным синтезированием апертуры. Патент RU 2099742 C1, кл. G01S 13/89.
2. Способ построения двумерного РЛИ прямолинейно летящей цели при многочастотном узкополосном зондировании. Патент RU 2099743 С1, кл. G01S 13/89.
3. Зиновьев Ю.С., Пасмуров А.Я. Методы обращенного синтезирования апертуры в радиолокации с помощью узкополосных сигналов. Зарубежная радиоэлектроника. №3, 1985.
4. Кондратенков Г.С., Фролов А.Ю. Радиовидение. М.: Радиотехника, 2005.
5. I. Fortuny. An Efficient 3-D Near - Field ISAR Algorithm. IEEE Transactions on Aerospace and Electronic Systems. Vol.34, №4, October 1998.
6. Митрофанов Д.Г. Формирование двумерного радиолокационного изображения цели с траекторными нестабильностями полета. Радиотехника и электроника. Том 47, №7, 2002.
Изобретение относится к радиоизмерительной технике и может быть использовано для получения двумерного радиолокационного изображения (РЛИ) объекта в расширенном диапазоне изменения эффективных площадей рассеивания (ЭПР) рассеивающих центров (РЦ) объекта. Получение РЛИ объекта основывается на способе обработки с помощью преобразования Фурье комплексных огибающих отраженных от объекта сигналов, полученных в процессе многочастотного импульсного зондирования вращающегося по курсу объекта. Достигаемый технический результат заключается в повышении разрешения РЦ и точности определения координат и ЭПР РЦ в широком диапазоне изменения ЭПР РЦ. Указанный результат достигается за счет высокоточных измерений несущей частоты в процессе многочастотного импульсного зондирования объекта, углов курса объекта при его вращении, координат центра синтезирования на объекте, а также за счет использования в алгоритме синтезирования опорной фокусирующей функции, пространственных частот и координат РЦ в связанной системе отсчета, определения оценок координат и ЭПР РЦ с большими значениями ЭПР при первом синтезировании РЛИ, уточнении этих оценок по минимуму функции энергии матрицы комплексных огибающих, коррекции исходной матрицы комплексных огибающих путем изъятия информации о РЦ с большими значениями ЭПР, повторного синтезирования со скорректированной матрицей для получения РЛИ с РЦ, имеющими малые значения ЭПР. 3 ил.
Способ получения двумерного радиолокационного изображения объекта в большом диапазоне изменения величин эффективных площадей рассеивания локальных рассеивающих центров при многочастотном импульсном зондировании, включающий излучение импульсов с изменением несущей частоты от импульса к импульсу с шагом Δf полосе частот ΔF, прием отраженных сигналов, измерение комплексных огибающих Ф отраженных сигналов и запоминание их в течение времени синтезирования в угловом секторе Δψ, образование матрицы комплексных огибающих и преобразование ее с помощью быстрого двухмерного преобразования Фурье в матрицу синтезированных откликов, определение величины порога по уровню первых боковых лепестков наиболее интенсивного отклика, сравнение величин откликов с порогом для выделения превышающих порог элементов матрицы, совокупность которых принимают за радиолокационное изображение объекта, в котором по положению выделенных откликов в матрице синтезированных откликов определяют значения координат, а по величинам квадратов модулей откликов определяют значения эффективных площадей рассеивания рассеивающих центров, отличающийся тем, что измеряют частоту f(tnm) зондирующих импульсов, момент времени измерения tnm запоминают, где n - номер шага перестройки частоты в полосе частот ΔF, m - номер повторного цикла перестройки, измеряют в земной системе отсчета координаты фазового центра антенны радиолокационной станции (РЛС) x0, y0, z0 и координаты xм(tnm), yм(tnm), zм(tnm) точки М на объекте, выбранной в качестве центра синтезирования, измеряют относительно земной системы отсчета угол курса
ψ(tnm) связанной с объектом системы отсчета с началом в точке М, вычисляют пространственные частоты
fx(tnm)=-2f(tnm)/c·sin(ψ(tnm)-ψ0),
fz(tnm)=2f(tnm)/c·cos(ψ(tnm)-ψ0),
где с - скорость света,
ψ0 - угол между линией, соединяющей фазовый центр антенны РЛС с центром синтезирования, и осью z земной системы отсчета, фазы измеренных значений комплексных огибающих Ф(tnm) отраженных сигналов корректируют на величину (4πf(tnm))/c·R0(tnm), где R0(tnm) - расстояние от фазового центра антенны РЛС до точки синтезирования М, полученные после коррекции значения комплексных огибающих Ф*(tnm) размещают в элементы матрицы T(k, l), двумерные номера которых (k, l) определяют по формулам
k=int[fx(tnm)/d],
l=int[fz(tnm)/d],
где int [•] - функция определения целой части числа,
d - шаг элементов матрицы Т по координатам fx, fz, матрицу T(k, l) подвергают двумерному дискретному преобразованию Фурье
g(x,z)=∑∑Ф*(k, l)exp[j2π(kx+lz)]
и по полученной двумерной матрице синтезированных откликов g(x, z) определяют двумерное радиолокационное изображение объекта, задают величину ρ порога разрешения по величине эффективной площади рассеяния рассеивающих центров и для элементов матрицы g(x, z), у которых квадрат модуля |g(x,z)|2 превышает порог ρ, определяют оценки координат xi *, zi *,  и оценки эффективных площадей рассеивания σi* выделенных рассеивающих центров, координаты xi*, zi* уточняют путем поиска в окрестности каждого выделенного рассеивающего центра координат xi**, zi**, дающих минимум по переменным x, z функции энергии
и оценки эффективных площадей рассеивания σi* выделенных рассеивающих центров, координаты xi*, zi* уточняют путем поиска в окрестности каждого выделенного рассеивающего центра координат xi**, zi**, дающих минимум по переменным x, z функции энергии
где 
R(x, z) - расстояние от фазового центра антенны РЛС до точки объекта с координатами x, z из окрестности выделенного i-го рассеивающего центра, и по полученным оценкам эффективных площадей рассеивания σi* и уточненным значениям координат хi **, zi ** выделенных рассеивающих центров определяют корректирующие поправки для комплексных огибающих

скорректированную матрицу комплексных огибающих со значениями ее элементов
Ф**(k,l)=Ф*(k,l)-Фкор(k,l)
подвергают двумерному дискретному преобразованию Фурье
g*(x,z)=∑∑Ф**(k,l)ехр[j2π(kx+lz)]
и по полученной двумерной матрице g*(x,z) синтезированных откликов определяют двумерное радиолокационное изображение объекта для рассеивающих центров с величинами эффективных площадей рассеивания, меньшими, чем заданный порог ρ.
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПРЯМОЛИНЕЙНО ЛЕТЯЩЕЙ ЦЕЛИ ПРИ МНОГОЧАСТОТНОМ УЗКОПОЛОСНОМ ЗОНДИРОВАНИИ | 1995 |
|
RU2099743C1 |
| RU 2066059 C1, 27.08.1996 | |||
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И МНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 1999 |
|
RU2152626C1 |
| ТРИАНГУЛЯЦИОННЫЙ СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ЦЕЛИ В РЛС СОПРОВОЖДЕНИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ. | 1995 |
|
RU2099742C1 |
| US 6563451 B1, 13.05.2003 | |||
| US 5442364 A, 15.08.1995 | |||
| Устройство для получения потока сыпучих материалов с заданной плотностью | 1977 |
|
SU690315A1 |
| EP 1869494 A1, 26.12.2007. | |||

