Изобретение относится к машиностроению, в частности к соединениям деталей механизмов и машин.
Известна двухподвижная цилиндрическая кинематическая пара четвертого класса, содержащая два звена в виде вала и втулки, соединенные с возможностью относительного вращения и осевого смещения (см., например, Артоболевский И.И. Теория механизмов и машин. М., 1975, с.25, рис.1.7.). Работа такой кинематической пары предполагает наличие двух силовых воздействий на ее звенья (осевая сила + момент). Такие кинематические пары находят применение в довольно сложных пространственных механизмах, и их применение позволяет, в ряде случаев, существенно упростить кинематическую схему механизма.
Известна также одноподвижная вращательная кинематическая пара пятого класса, содержащая два звена в виде вала и втулки, соединенные с возможностью относительного вращения, а осевое относительное смещение их ограничено упорами (буртами) (см., например, Артоболевский И.И. Теория механизмов и машин. М., 1975, с.21, рис.1.1.). Работа такой кинематической пары предполагает наличие одного силового воздействия на ее элементы (момент). Такие кинематические пары находят очень широкое применение в плоских механизмах, но они же часто применяются и в довольно сложных пространственных механизмах в последовательном сочетании с поступательной кинематической парой пятого класса (т.е. две кинематические пары 5 класса совместно выполняют функцию одной кинематической пары 4 класса), а это, в ряде случаев, существенно усложняет кинематическую схему пространственного механизма.
Противоречивое требование обеспечения пространственного движения элементов кинематической пары при одном силовом воздействии разрешается в двухконтактной кинематической паре, в которой дополнительный контакт устраняет одну степень свободы, допуская при этом зависимое пространственное движение элементов (звеньев) пары (см., например, патент РФ на изобретение №2098701 от 1997 г., кл. F16H 25/00, F16S 5/00), которая и выбрана нами в качестве прототипа.
К недостаткам прототипа можно отнести то, что дополнительный контакт обеспечивает постоянное соотношение между двумя относительными движениями кинематической пары и для его изменения необходимо менять кинематическую пару в механизме, что существенно сужает ее сферу применения.
Целью изобретения является расширение сферы применения двухконтактных кинематических пар, путем динамизации дополнительной связи между элементами пары.
Эта цель достигается тем, что в двухконтактную кинематическую пару, содержащую звенья в виде вала и втулки, соединенные с возможностью относительного вращения и осевого смещения, и дополнительный контакт, выполненный в виде двух пальцев, связанных соответственно с валом и втулкой, вводится устройство фиксации пальца, обеспечивающее изменение положения пальца относительно звена. Положение пальца может меняться за счет относительных линейных смещений пальца и поворотов пальца. Кроме того, устройство фиксации пальца может быть установлено как на одном звене, так и на каждом из двух звеньев кинематической пары.
При таком выполнении кинематической пары возможно в широком диапазоне изменять зависимость между двумя движениями элементов пары путем: изменения углов наклона пальцев относительно элементов пары; поворота криволинейных пальцев вокруг собственной оси и относительно устройства фиксации; смещения пальца по его оси относительно устройства фиксации и относительно элемента пары; оперативной замены пальцев различной кривизны в устройстве фиксации пальцев. Это позволит существенно расширить диапазон возможных зависимых движений между элементами кинематической пары, облегчить и ускорить настройку пространственного механизма на выполнение конкретной работы.
В простейшем случае устройство фиксации может быть введено для одного из пальцев кинематической пары. В сложных случаях, когда аналитически или графически исследовать движение звеньев пространственного механизм затруднительно и предполагается большой объем работ по экспериментальной доводке и настройке механизма, целесообразно ввести устройства фиксации для каждого пальца кинематической пары.
Только введение устройства фиксации пальцев, обеспечивающего оперативное изменение в широком диапазоне зависимости между двумя движениями элементов (звеньев) кинематической пары позволяет достичь цели изобретения - расширение сферы применения двухконтактных кинематических пар путем динамизации дополнительной связи между элементами пары.
Степень динамизации кинематической пары можно дополнительно увеличить за счет того, что один или оба пальца по длине могут быть выполнены переменного по площади или по форме сечения. Причем, если сечение очерчено кривой, то зависимость между двумя движениями звеньев кинематической пары будет описываться гладкой функцией, а если сечение пальца очерчено ломаной линией, то, при переходе контакта с одного ребра на другое, в графике зависимости появятся точки разрыва первого рода.
Дальнейшую динамизацию кинематической пары можно увеличить путем применения специальных материалов при изготовлении одного или двух пальцев: металл с памятью формы, сочетания двух металлов с различными коэффициентами линейного удлинения (биметалла). При этом под воздействием температуры, например, окружающей среды, палец из металла с памятью формы может довольно быстро поменять свои размеры, кривизну и форму, а палец из биметалла плавно (отслеживая изменение температуры) изменять свою кривизну.
Если температура окружающей среды изменяется незначительно, то пальцы из металла с памятью формы или из биметалла могут быть выполнены полыми, с возможностью размещения в полости нагревательного элемента. При этом появляется возможность дистанционного изменения параметров пальцев в процессе работы механизма с такой кинематической парой, а следовательно изменять в процессе работы зависимость между двумя движениями звеньев кинематической пары. При этом можно менять параметры только части пальца, если нагревательный элемент выполнить в виде ряда последовательных секций.
Для уменьшения влияния одной секции нагревательного элемента на другую при их включении целесообразно между секциями нагревательного элемента разместить теплоизолирующий материал.
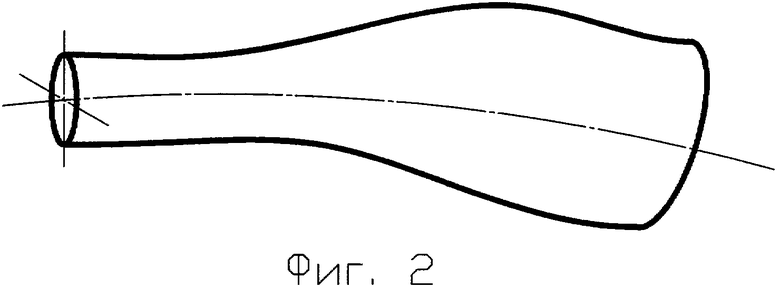
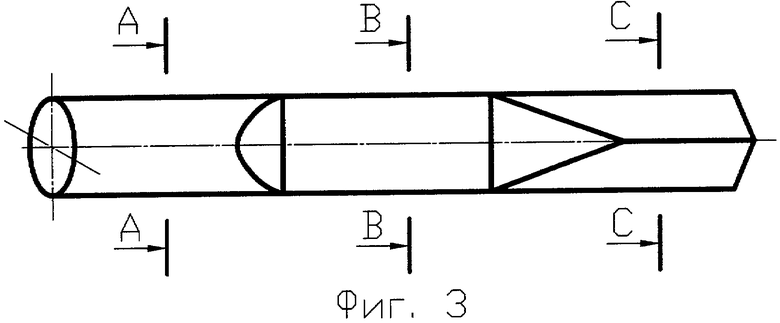
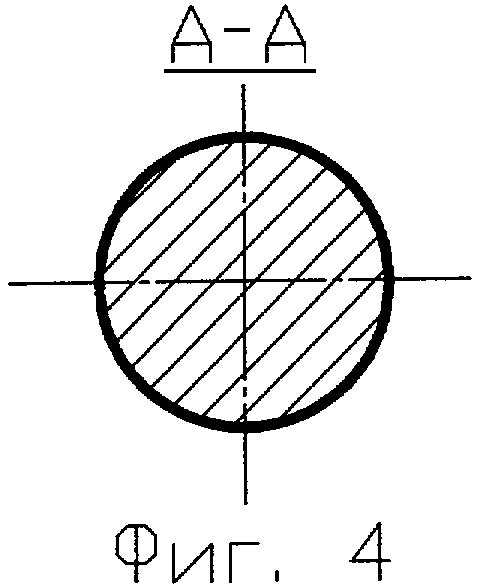
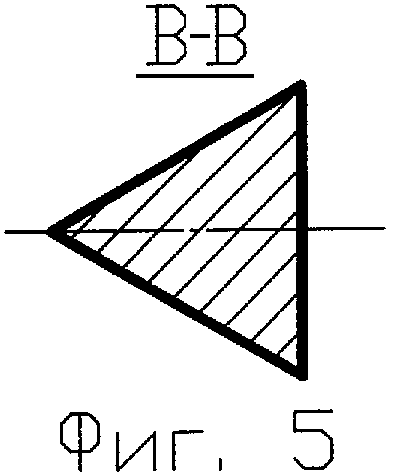
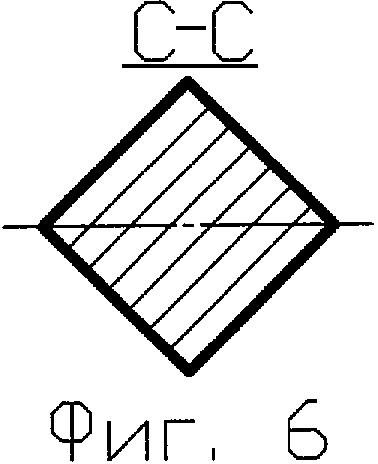
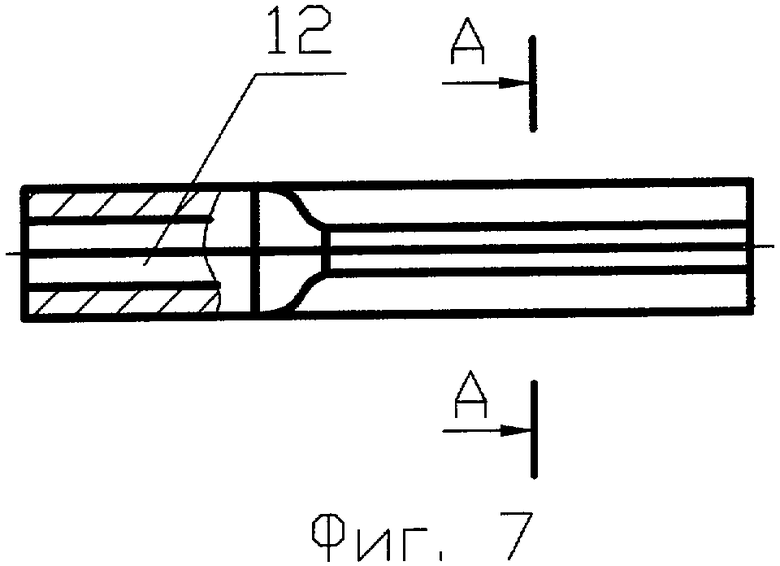
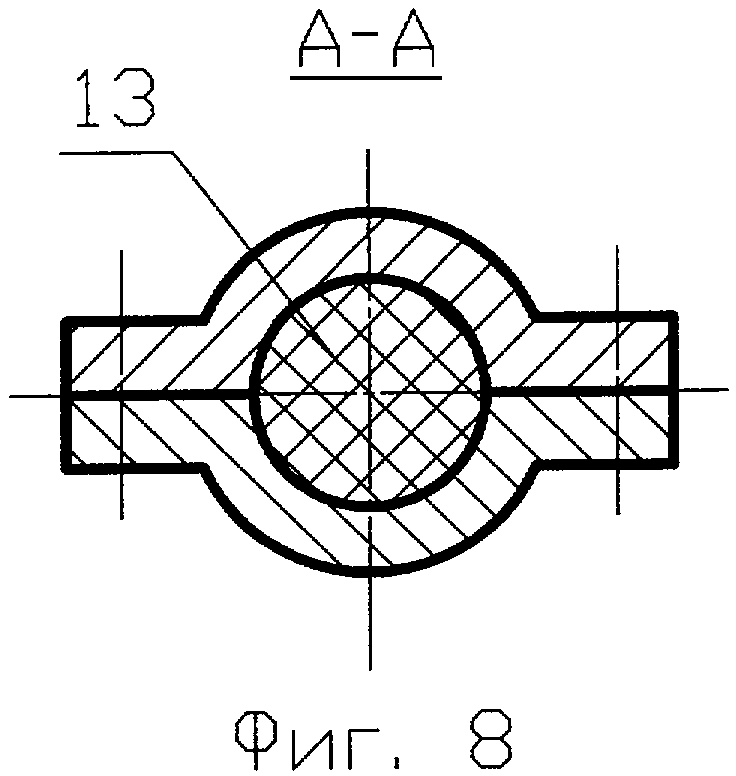
На фиг.1 изображена схематично конструкция двухконтактной кинематической пары с устройством фиксации пальца, размещенном на втулке. На фиг.2 показан палец с переменной по оси площадью сечения. На фиг.3 - палец с меняющейся по оси формой сечения. На фиг.4 - сечение А-А на фиг.3. На фиг.5 - сечение В-В на фиг.3. На фиг.6 - сечение С-С на фиг.3. На фиг.7 - палец из биметалла с отверстием по оси пальца. На фиг.8 - сечение по А-А на фиг.7.
Двухконтактная кинематическая пара (фиг.1) содержит вал 1 и втулку 2. С валом 1 жестко связан палец 3, а на втулке 2 закреплено устройства фиксации 4 пальца 5. Палец 5 фиксируется зажимом 6 в оси 7, которая установлена с возможностью поворота и осевого смещения относительно стойки 8 с последующей фиксацией зажимом 9. Стойка 8 жестко связана с платформой 10, которая может вращаться вокруг своей оси относительно втулки 2.
Такое выполнение устройства фиксации обеспечивает пальцу 5 пять степеней свободы (плюс возможность замены пальца на новый) при настройке закона относительного движения элементов кинематической пары, после чего палец 5 жестко фиксируется относительно втулки 2.
Следует заметить, что, при решении конкретной задачи, может потребоваться только, например, две или даже только одна степень свободы пальца 5 относительно втулки 2. При этом конструкция устройства фиксации существенно упростится.
Палец 3 (или 5, или и 3 и 5) может иметь постоянную по длине форму, но переменную площадь сечения (фиг.2), постоянную площадь сечения и переменную форму, как например показано на фиг.3-6, а также различные сочетания этих вариантов.
Палец может быть выполнен из материала с памятью формы или биметалла, что позволит ему изменять свои параметры при изменении температуры окружающей среды. При соответствующем выборе конструкции пальцев будет обеспечена автоматическая корректировка закона относительного движения звеньев кинематической пары (самокорректировка).
Если изменение температуры окружающей среды незначительное, то палец может иметь отверстие по своей оси 12 (фиг.7 и 8), в котором размещается нагревательный элемент 13. В этом случае изменять параметры пальца можно будет по команде оператора или в соответствии с программой управления механизмом в процессе его работы и дистанционно.
При этом можно изменять в процессе работы параметры только части пальца или всех частей, но с разной интенсивностью, если нагревательный элемент выполнить в виде ряда последовательных секций.
Для уменьшения влияния одной секции нагревательного элемента на другую при их включении, целесообразно между секциями нагревательного элемента ввести теплоизолирующий материал.
Следует отметить, что управление температурой такого пальца равносильно введению специального привода между элементами пары, так как изменение параметров пальца (кривизны, формы и пр.) приведет к небольшим относительным смещениям (микросмещениям) элементов кинематической пары. Это позволит в ряде случаев отказаться от введения в конструкцию механизма специальных приводов, то есть упростить конструкцию механизма.
Настоящее изобретение дает начало новому классу кинематических пар с переменными или изменяющимися в процессе работы параметрами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм поворота исполнительного органа манипулятора | 1987 |
|
SU1481054A1 |
| ДВУХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1996 |
|
RU2098701C1 |
| РЕКЛАМНАЯ УСТАНОВКА | 2003 |
|
RU2263977C2 |
| ИМПУЛЬСНЫЙ МЕХАНИЧЕСКИЙ ВАРИАТОР | 1991 |
|
RU2011075C1 |
| Швейная машина двухниточного цепного стежка | 1981 |
|
SU1060723A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2274544C1 |
| УСТРОЙСТВО ДЛЯ УСКОРЕННЫХ ИСПЫТАНИЙ МНОГООПОРНЫХ ДОЖДЕВАЛЬНЫХ МАШИН ФРОНТАЛЬНОГО И КРУГОВОГО ДЕЙСТВИЯ | 1998 |
|
RU2129262C1 |
| Шарнир универсального шпинделя | 1979 |
|
SU889167A1 |
| ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2013 |
|
RU2578809C2 |
| СПОСОБ ИЗВЛЕЧЕНИЯ КОРНЕВИЩ КОРНЕОТПРЫСКОВЫХ СОРНЯКОВ, ПРЕИМУЩЕСТВЕННО КОРНЕЙ И КОРНЕВИЩ СОЛОДКИ, И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2160524C1 |
Изобретение относится к машиностроению, в частности к соединениям деталей механизмов и машин. Двухконтактная кинематическая пара содержит звенья в виде вала и втулки, соединенные с возможностью относительного вращения и осевого смещения, и дополнительный контакт, выполненный в виде двух пальцев, связанных соответственно с валом и втулкой. Кинематическая пара дополнительно содержит устройство фиксации пальца, обеспечивающее изменение положения пальца относительно звена кинематической пары. Достигается расширение сферы применения двухконтактных кинематических пар путем динамизации дополнительной связи между элементами пары. 8 з.п. ф-лы, 8 ил.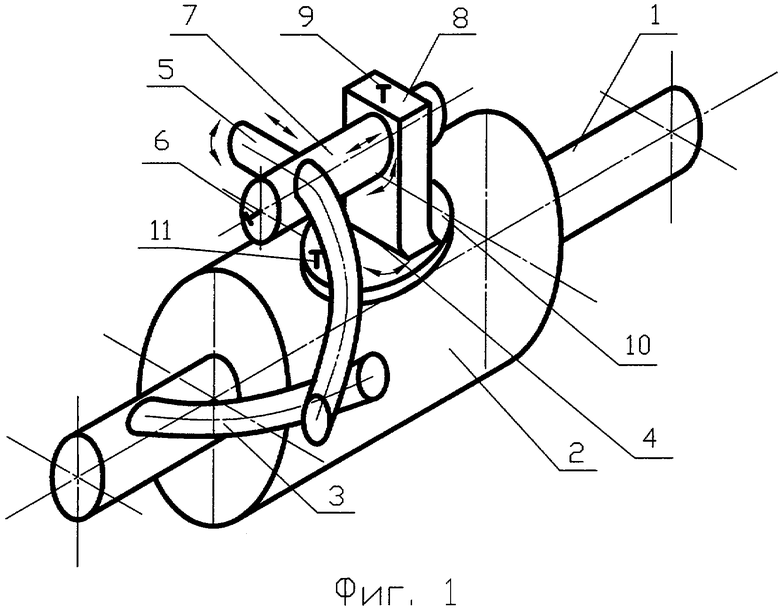
| ДВУХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1996 |
|
RU2098701C1 |
| JP 2000217304 A, 04.08.2000 | |||
| Механизм для преобразования возвратно-поступательного движения во вращательное | 1986 |
|
SU1467297A1 |

