Изобретение относится к машиностроению и может использоваться для соединения звеньев кинематических цепей, в том числе механизмов.
Известно, что любая механическая система (механизм, машина) состоит из звеньев и соединений звеньев. Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой [1, с.20, 5-й абзац сверху]. Часть звена, которой оно взаимодействует с другим звеном, называется геометрическим элементом звена.
Известна двухподвижная кинематическая пара [1, стр.60, рис.99], включающая два звена, каждое из которых выполнено в виде тора. Такая пара имеет комплекс относительных движений ВВ, определяющий два относительных вращательных движения вокруг двух из осей пространственной системы координат. Недостатком этой пары является невозможность воспроизведения дополнительного (третьего) поступательного движения вдоль третьей оси координат.
Наиболее близкой к заявляемой кинематической паре является трехподвижная пара, обеспечивающая комплекс движений ПВВ [1, стр.59, рис.97], принимаемая за прототип. Пара образуется двумя звеньями, одно из которых оканчивается шаровой поверхностью, на которой имеется палец, входящий в прямолинейную прорезь, имеющуюся на втором звене - полом цилиндре. В этой кинематической паре обеспечиваются относительные вращательные движения звеньев вокруг двух из осей пространственной системы координат и поступательное движение вдоль третьей оси.
Недостатком прототипа является сложность его изготовления ввиду того, что геометрические размеры прорези и пальца должны строго соответствовать друг другу. При несоответствии их размеров в паре появится лишняя подвижность, и пара станет четырехподвижной с комплексом движений ВПВВ. Недостатком прототипа также является низкая надежность области рабочей поверхности около прорези, что значительно ограничивает применение такой пары при создании конструкций механизмов.
Задачей изобретения является создание кинематической пары, обеспечивающей требуемый комплекс движений ПВВ без применения в ней звеньев, имеющих прорезь и палец.
Сущность заявляемого устройства заключается в том, что предлагается трехподвижная кинематическая пара, включающая два звена с геометрическими элементами в виде охватываемой и охватывающей поверхностей и обеспечивающая три относительных движения между звеньями, при этом охватываемая поверхность первого звена выполнена в виде круговой бочки с шаровыми сегментами, жестко установленными на ее торцах, а охватывающая поверхность второго звена выполнена в виде прямого желоба с цилиндрическим дном, при этом радиус кривизны образующей боковой поверхности круговой бочки выполнен больше радиуса ее среднего сечения.
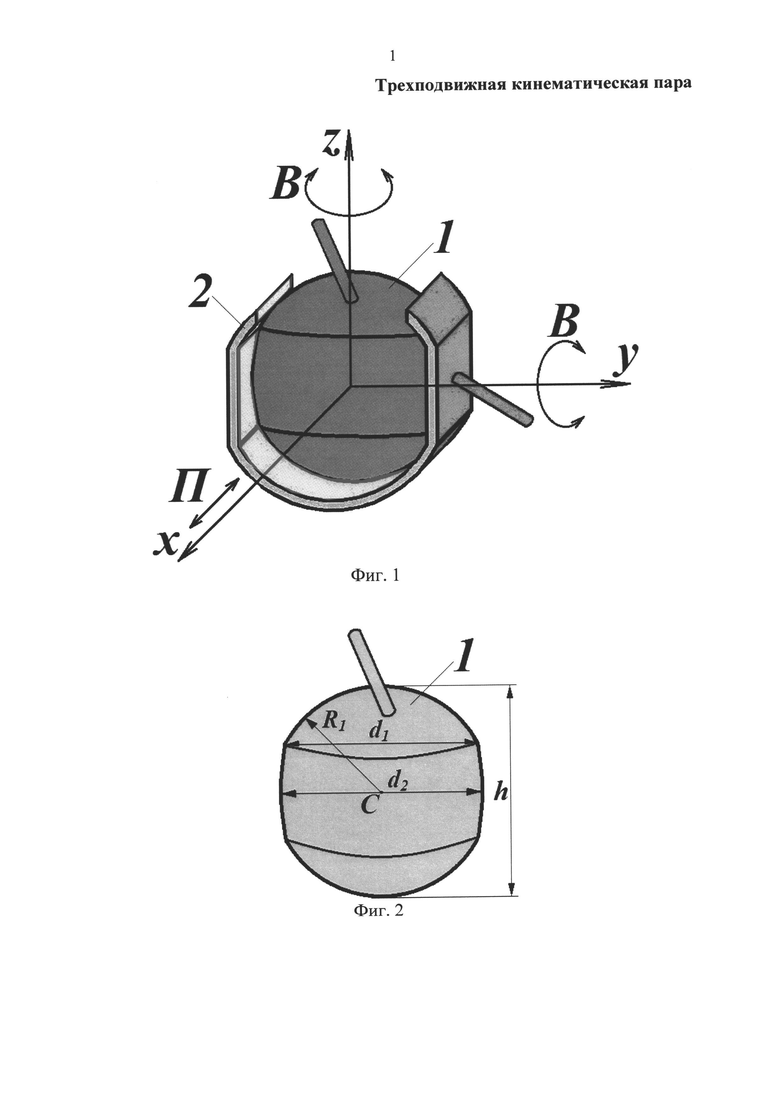
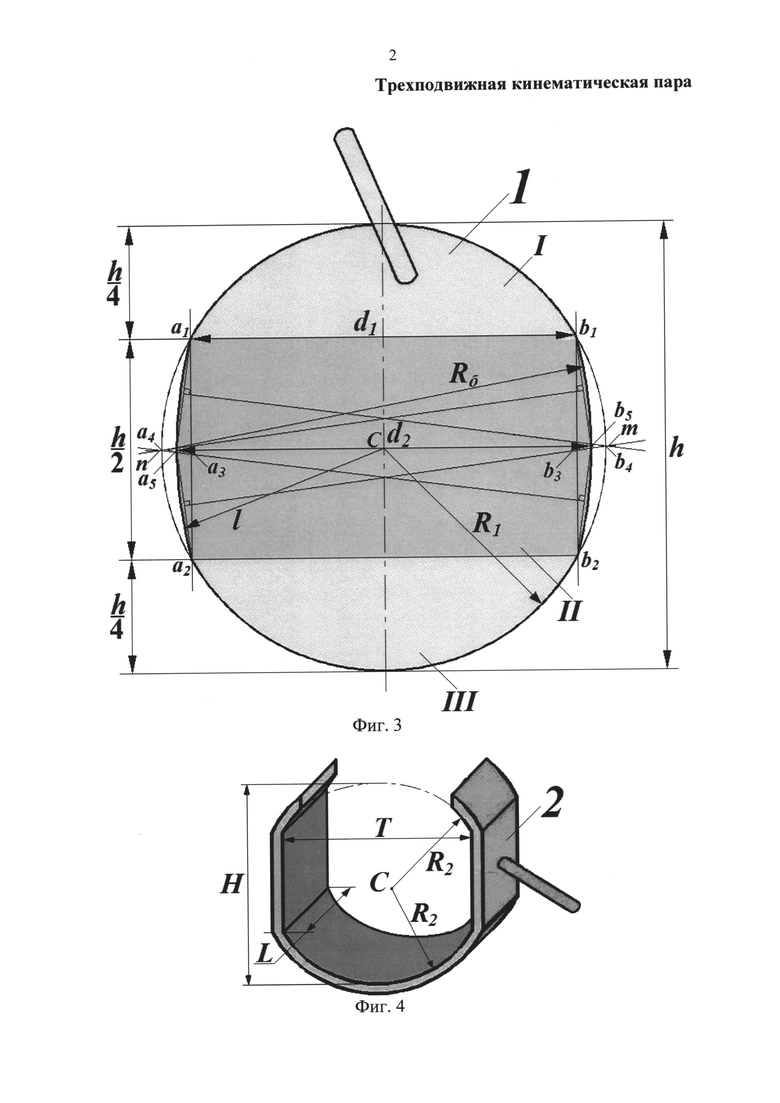
На фиг.1 показана трехподвижная кинематическая пара между звеньями 1 и 2. На фиг.2 показано звено 1 кинематической пары. На фиг.3 показана геометрия звена 1 в увеличенном масштабе. На фиг.4 показано звено 2 кинематической пары. Геометрические элементы звеньев пары выполняются в виде охватываемой (звено 1) и охватывающей (звено 2) поверхностей, взаимодействующих между собой (фиг.1).
Охватываемая поверхность звена 1 (фиг.2) выполняется особым образом. Шар радиусом R1 произвольно делится на три части (I, II, III) параллельными секущими плоскостями (фиг.3). Высоты I и III частей произвольно принимаются равными h/4, высота II части - h/2, где h - полная высота звена 1, равная 2R1, т.е. h=2R1=D1, где D1 - диаметр шара. Части I и III звена 1 представляют собой шаровые сегменты [2, стр.189, рис.2.59] с равными диаметрами оснований d1; часть II представляет собой круговую бочку [2, стр.189, рис.2.63] с диаметрами торцов (под торцом понимается поперечная по отношению к длине или оси плоская поверхность деталей призматической, цилиндрической или др. форм [3, стр.953]), также равными d1. Т.е. диаметры оснований шаровых сегментов равны диаметрам торцов круговой бочки.
Диаметр среднего сечения d2 круговой бочки выполняется больше диаметра d1 основания шарового сегмента, но меньше диаметра D1 шара, т.е. D1>d2>d1. Диаметр d2=2r2, где r2 - радиус среднего сечения круговой бочки. Радиус кривизны Rб образующей боковой поверхности круговой бочки подбирается следующим образом. Через крайние точки оснований шаровых сегментов проводится вертикаль a1a2 (b1b2). На ее пересечении с горизонтальной осевой линией шара фиксируется точка а3 (b3); далее фиксируется точка а4 (b4) - точка пересечения горизонтальной осевой линии шара и поверхности шара. Далее между точками a3 и a4 (b3 и b4) произвольно выбирается точка a5 (b5), через которую проводятся отрезки a1a5 и a2a5 (b1b5 и b2b5). Через середины отрезков a1a5 и a2a5 (b1b5 и b2b5) проводятся их перпендикуляры, которые пересекаются между собой в точке m(n). Далее из точки m(n) радиусом Rб, равным длине отрезка ma5 (nb5), проводится образующая боковой поверхности круговой бочки от точки a1 до a2 (от b1 до b2), при этом длины отрезков ma1, ma5, ma2 (nb1, nb5, nb2) равны между собой и равны Rб, т.е. ma1(nb1)=ma2(nb2)=ma2(nb2)=Rб (фиг.3).
Охватывающая поверхность звена 2 выполняется в виде прямого желоба [4, стр.29, рис.5] с цилиндрическим дном. Желоб выполняется высотой H, шириной T, протяженностью L и радиусом цилиндрического дна R2 (фиг.4). Радиусы R1 и R2, диаметр d2 и ширина T, высоты h и H звеньев 1 и 2 принимаются равными, то есть R1=R2, d2=T, h=H, при этом диаметры d2 и D1 принимаются меньше протяженности L, то есть d2<L, D1<L.
В паре звеньев 1 и 2 обеспечивается контакт в двух точках (поверхность звена 1 в области диаметра среднего сечения d2 круговой бочки со звеном 2) и контакт по линии (поверхность шаровой части звена 1 с цилиндрическим дном звена 2).
Относительное движение звеньев может быть рассмотрено в декартовой системе координат xyz. В направлении оси x звено 1 относительно звена 2 может двигаться только поступательно (движение П). Вокруг осей y и z звену 1 обеспечиваются лишь вращательные движения В. Относительные движения звеньев вдоль осей y и z оказываются невозможными в связи с замкнутостью контактов.
Относительный поворот звеньев 1 и 2 вокруг оси x, проходящей через центр C, невозможен. Центр кривизны дуги a1a2 (b1b2) удален на расстоянии ma5(nb5), равном радиусу Rб, который больше радиуса среднего сечения бочки - r2, т.е. Rб>r2. Звено 1 может повернуться вокруг оси x только при условии, когда Rб=r2. Расстояние l от центра C до любой точки (кроме точки a5 (b5), лежащей в области диаметра d2 среднего сечения) образующей боковой поверхности круговой бочки будет больше радиуса r2 ее среднего сечения (r2<l), поэтому поворот вокруг оси x оказывается невозможным. Условие r2=l соблюдается только в точке a5 (b5).
Работа трехподвижной кинематической пары заключается в следующем. Задавая в пространстве xyz движение звену 1, удерживаемому звеном 2, относительно оси x будет обеспечено только поступательное движение, а относительно осей y и z - только вращательные. Запрещенными движениями в предлагаемой кинематической паре оказываются вращательное движение вокруг оси x и поступательные движения вдоль осей y и z. Таким образом, трехподвижная кинематическая пара обеспечивает комплекс трех относительных движений ПВВ.
Использованные источники
1. Артоболевский И.И. Теория механизмов. Изд-во «Наука», Гл. ред. физ.-мат. лит., 1965, 776 с.
2. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. 13-е изд., исправленное. М.: Наука. Главная редакция физико-математичекой литературы, 1986, 544 с.
3. Краткий политехнический словарь. М.: Государственное изд-во технико-теоретической литературы, 1956, 1136 с.
4. Дворников Л.Т., Живаго Э.Я. Основы теории кинематических пар: Учебное пособие. Новокузнецк: СибГИУ, 2005. - 116 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2014 |
|
RU2564788C2 |
| ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2013 |
|
RU2534095C1 |
| ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2012 |
|
RU2520624C2 |
| УДЕРЖИВАЮЩАЯ ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2012 |
|
RU2502898C1 |
| ОДНОКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2018 |
|
RU2681467C1 |
| Трехзвенное кинематическое соединение с тремя относительными движениями | 2015 |
|
RU2610239C1 |
| ОДНОКОНТАКТНАЯ ЧЕТЫРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2018 |
|
RU2676840C1 |
| ДВУХЪЯРУСНЫЙ ЭКСЦЕНТРИКОВЫЙ САМОУСТАНАВЛИВАЮЩИЙСЯ РАДИАЛЬНЫЙ ПОДШИПНИК КАЧЕНИЯ | 2011 |
|
RU2450177C1 |
| ДВУХПОДВИЖНАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2021 |
|
RU2755441C1 |
| ПРОСТРАНСТВЕННЫЙ КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ ВТОРОГО СЕМЕЙСТВА | 2010 |
|
RU2422703C1 |
Изобретение относится к области машиностроения, а более конкретно к шарнирным соединениям. Трёхподвижная кинематическая пара состоит из прямого желоба с цилиндрическим дном и расположенного в нём второго звена в виде круговой бочки с шаровыми сегментами, жестко установленными на торцах. В направлении оси Х круговая бочка может двигаться поступательно, а вокруг осей Y и Z - вращательно. Достигается повышение надёжности. 4 ил.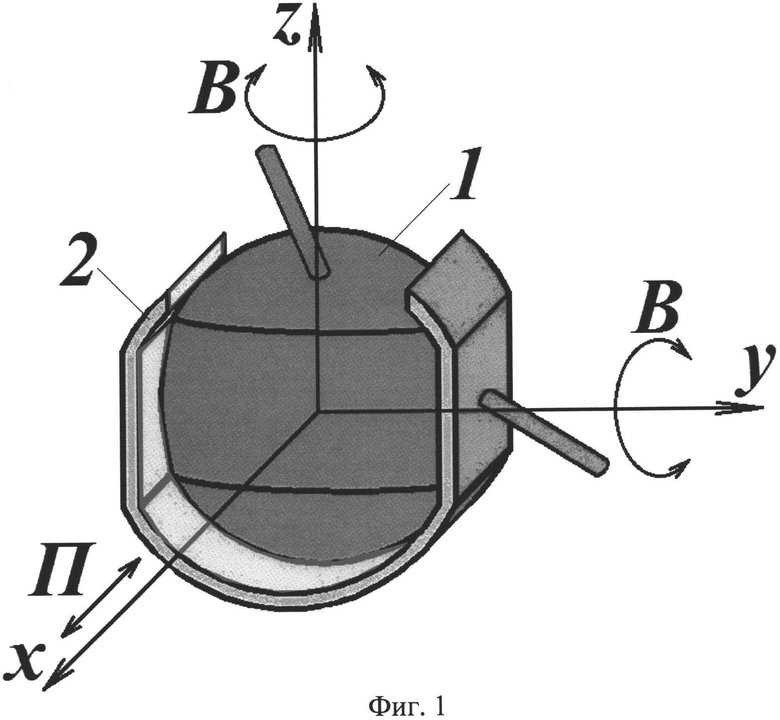
Трехподвижная кинематическая пара, включающая два звена с геометрическими элементами в виде охватываемой и охватывающей поверхностей и обеспечивающая три относительных движения между звеньями, отличающаяся тем, что охватываемая поверхность первого звена выполнена в виде круговой бочки с шаровыми сегментами, жестко установленными на ее торцах, а охватывающая поверхность второго звена выполнена в виде прямого желоба с цилиндрическим дном, при этом радиус кривизны образующей боковой поверхности круговой бочки выполнен больше радиуса ее среднего сечения.
| Устройство для формирования шкалы на экране электронно-лучевой трубки | 1979 |
|
SU1008778A1 |
| Дворников Л.Т., Живаго Э.Я., Основы теории кинематических пар, Новокузнецк, 2005, стр | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Солесос | 1922 |
|
SU29A1 |
| СИСТЕМА С ПЕРЕДВИЖНЫМ ЭЛЕМЕНТОМ | 1992 |
|
RU2107798C1 |

