Фие.2
Изобретение относится к машиностроению, в частности к манипуляторам для подачи заготовок в технологическое оборудование.
Целью изобретения является расширение технологических возможностей за счет регулирования угла поворота исполнительного органа при обеспечении компактности механизма.
20
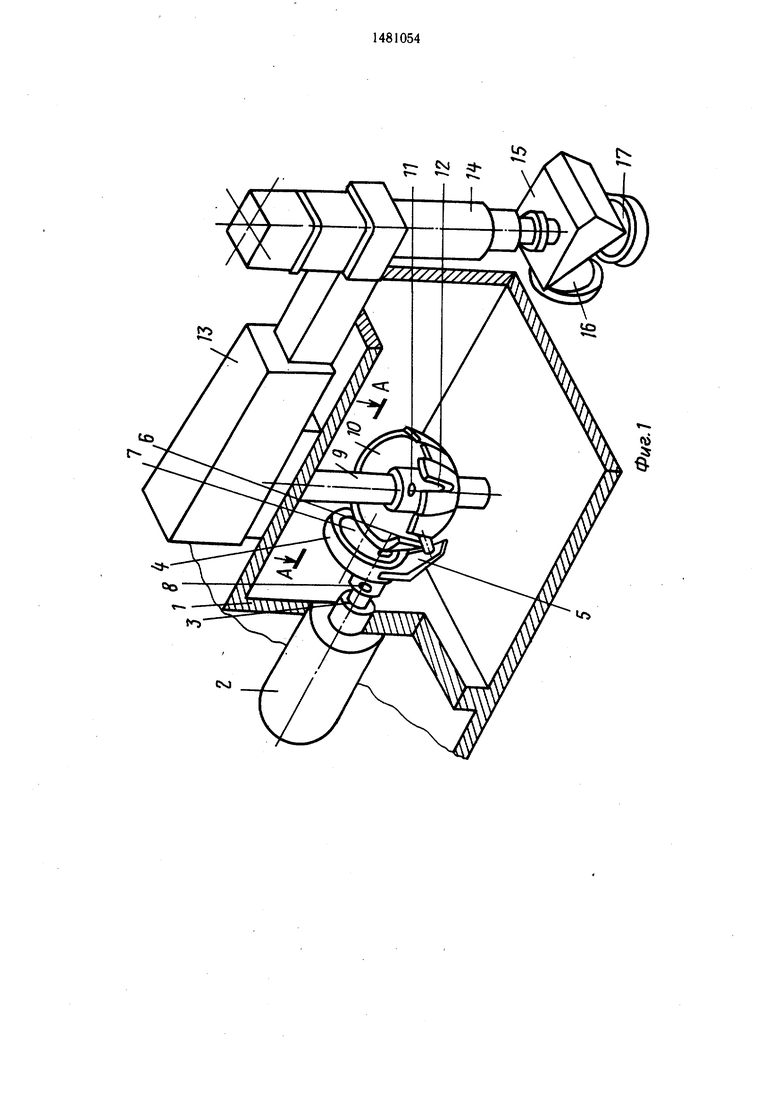
Механизм работает следующим образом. Мотор-редуктор 2 сообщает водилу 5 с пальцем 6 вращательное движение. Палец 6 входит в паз 12 пространственной кулисы 10 и поворачивает последнюю вместе с колонной 9 руки манипулятора на требуемый угол. Далее палец 6 выходит из паза кулисы 10, а мотор-редуктор отключается. В этом положении производится о пускание-подъем руки и втягивание-выдвижение руки. Модуль 13
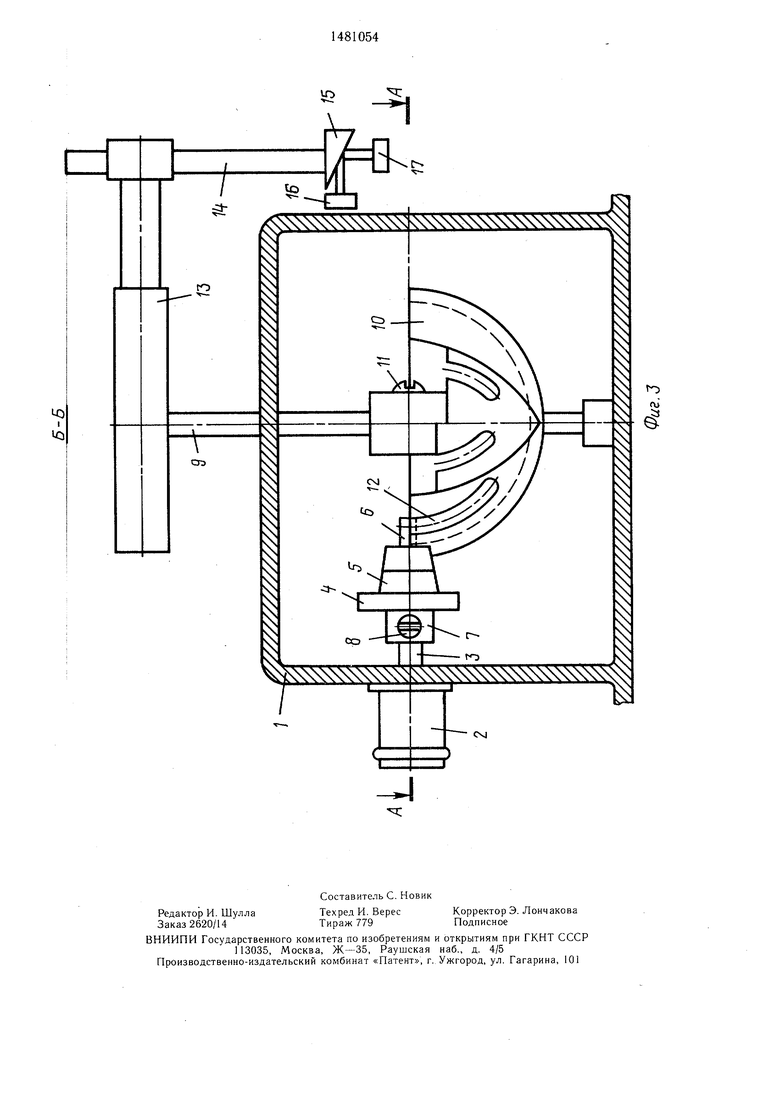
На фиг. I показан манипулятор, общий продольного перемещения вместе с модулем вид; на фиг. 2 - разрез А-А на фиг. 1; 14 вертикального перемещения и захватным на фиг. 3 - разрез Б-Б на фиг. 2.устройством 15 в крайних положениях фиксиМеханизм поворота исполнительного ор- руются. Обратный поворот осуществляется гана манипулятора содержит корпус 1, в включением мотор-редуктора, при этом на- котором установлен мотор-редуктор 2 с ре- 15 правление вращения выходного вала 3 долж гулируемой частотой вращения, на выходном но быть противоположным. валу 3 которого на эксцентриковой втулке 4 установлено водило 5 с пальцем 6. Водило 5 установлено с возможностью осевого смещения относительно вала 3 за счет его поворота вместе с втулкой относительно диска 7, эксцентрично установленного на валу 3 мотор-редуктора 2, с фиксацией в требуемом положении винтом 8. На поворотной колонне 9 установлена пространственная кулиса 10 с возможностью осевого и окружного пере- 25 кулисного механизма, мещений относительно колонны 9 с фиксацией в требуемом положении винтом И.Формула изобретения Пространственная кулиса 10 при одном угле 1. Механизм поворота исполнительного поворота манипулятора может быть выпол- органа манипулятора, содержащий корпус йена в виде полусферы с пазом 12 или в ви- с поворотной колонной, исполнительный орде наклонной вилки. При этом оси поворота 30 raHi смонтированный на ней, и привод пово- водила 5 и кулисы 10 взаимно перпендику- рота исполнительного органа, выходной вал лярны, т.е. лежат в одной плоскости и пересекаются в вершине конусов, описываемых осью вращения и образующими пальца 6. Кулиса 10 выполнена из отдельных сферических сегментов с разным радиусом кривизны с пазом на каждом из них. Количество сферических сегментов определяется числом требуемых углов поворота колонны 9 манипулятора.
На колонну 9 крепится модуль 13 про- 40 этом оси поворота водила и кулисы взаим- дольного перемещения, связанный с моду- но перпендикулярны, водило смонтировано лем 14 вертикального перемещения и за- на выходном валу привода с возможностью хватным устройством 15, состоящим из ме- осевого смещения относительно него и ради- ханизма ориентации схватов и двух схватов ального смещения пальца, а кулиса выпол- 16 и 17, расположенных под углом 90° один . нена в виде сферических сегментов с раз- к другому. С целью уменьшения потерь на личными радиусами кривизны и соответстРегулирование угла поворота манипулятора обеспечивается совместным поворотом водила 5 относительно эксцентрикового диска 7 и пространственной кулисы 10 относительно колонны 9 так, что палец 6 в начале движения кулисы входит в паз 12 по касательной к траектории, описываемой центром вращения пальца, обеспечивая тем самым безударную работу пространственного
35
которого кинематически связан с этой колонной, отличающийся тем, что, с целью расширения технологических возможностей за счет регулирования угла поворота исполнительного органа при одновременном обеспечении компактности механизма, кинематическая связь привода с колонной выполнена в виде пространственного кулисного механизма, состоящего из водила с пальцем и кулисы, при
трение в кинематической паре круговой,паз пространственной кулисы - палец водила последний смонтирован на водиле 5 и выполнен коническим с вершиной конуса, совпадающей с точкой пересечения осей враще- 50 ния кулисы 10 и водила 5, обеспечивая тем самым чистое качение поверхности пальца по стенке паза 12, который также имеет коническую поверхность.
вующими пазами на каждом из них, причем кулиса смонтирована на колонне с возможностью осевого и окружного перемещений относительно нее с последующей ее фиксацией. 2. Механизм по п. 1, отличающийся тем, что палец выполнен коническим и смонтирован на водиле шарнирно, а соответствующий ему паз сферического сегмента имеет коническую поверхность.
руются. Обратный поворот осуществляется включением мотор-редуктора, при этом на- правление вращения выходного вала 3 долж но быть противоположным. кулисного механизма, Формула изобретения 1. Механизм поворота исполнительного органа манипулятора, содержащий корпус с поворотной колонной, исполнительный орraHi смонтированный на ней, и привод пово- рота исполнительного органа, выходной вал
Регулирование угла поворота манипулятора обеспечивается совместным поворотом водила 5 относительно эксцентрикового диска 7 и пространственной кулисы 10 относительно колонны 9 так, что палец 6 в начале движения кулисы входит в паз 12 по касательной к траектории, описываемой центром вращения пальца, обеспечивая тем самым безударную работу пространственного
руются. Обратный поворот осуществляется включением мотор-редуктора, при этом на- правление вращения выходного вала 3 долж но быть противоположным. кулисного механизма, Формула изобретения 1. Механизм поворота исполнительного органа манипулятора, содержащий корпус с поворотной колонной, исполнительный орraHi смонтированный на ней, и привод пово- рота исполнительного органа, выходной вал
этом оси поворота водила и кулисы взаим- но перпендикулярны, водило смонтировано на выходном валу привода с возможностью осевого смещения относительно него и ради- ального смещения пальца, а кулиса выпол- нена в виде сферических сегментов с раз- личными радиусами кривизны и соответст
которого кинематически связан с этой колонной, отличающийся тем, что, с целью расширения технологических возможностей за счет регулирования угла поворота исполнительного органа при одновременном обеспечении компактности механизма, кинематическая связь привода с колонной выполнена в виде пространственного кулисного механизма, состоящего из водила с пальцем и кулисы, при
вующими пазами на каждом из них, причем кулиса смонтирована на колонне с возможностью осевого и окружного перемещений относительно нее с последующей ее фиксацией. 2. Механизм по п. 1, отличающийся тем, что палец выполнен коническим и смонтирован на водиле шарнирно, а соответствующий ему паз сферического сегмента имеет коническую поверхность.
г
| название | год | авторы | номер документа |
|---|---|---|---|
| "Устройство для обработки трехмерных поверхностей | 1973 |
|
SU485850A1 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
| Радиально-ковочная машина | 1979 |
|
SU804164A1 |
| ДИСКОВЫЙ ПЛАНЕТАРНЫЙ ВАРИАТОР | 2008 |
|
RU2391586C2 |
| Профиленастраиваемое устройство с однокоординатным числовым программным управлением для обработки матриц пресс-форм | 1974 |
|
SU557882A1 |
| Устройство для перемешивания | 2023 |
|
RU2799476C1 |
| КОРОМЫСЛО-КУЛИСНЫЙ КОЛЕБАТЕЛЬНЫЙ МЕХАНИЗМ НЕФРИКЦИОННОГО ВЫСОКОМОМЕНТНОГО ВАРИАТОРА | 2021 |
|
RU2757327C1 |
| ПРОХОДЧЕСКИЙ РОБОТ И ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ПРОХОДЧЕСКОГО РОБОТА | 1988 |
|
SU1549153A1 |
| Шахтная бурильная установка | 1982 |
|
SU1073448A1 |
| Устройство для абразивоструйной обработки внутренних поверхностей цилиндрических сосудов | 1979 |
|
SU867627A1 |
Изобретение относится к области машиностроения и ,в частности, к манипуляторам для подачи заготовок в технологическое оборудование. Целью изобретения является расширение технологических возможностей за счет регулирования угла поворота исполнительного органа при обеспечении компактности механизма. При включении мотор-редуктора начинают вращаться водило 5 с пальцем 6, который заходит в паз 12 кулисы 10 и поворачивает колонну 9 на требуемый угол. Изменение угла поворота колонны осуществляется поворотом и осевым смещением кулисы, состоящей из нескольких сферических сегментов с различными радиусами кривизны, при этом водило 5 с пальцем 6 смещаются в осевом и радиальном направлении с последующей фиксацией винтом 8 на валу 3. 1 з.п. ф-лы, 3 ил.
| Андре П., Кофман Ж.-М., Лот Ф, Тайар Ж.-П | |||
| Конструирование роботов.-М.: Мир, 1986, с | |||
| Вагонетка для кабельной висячей дороги, переносной радиально вокруг центральной опоры | 1920 |
|
SU243A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
