Предлагаемое изобретение относится к авиационному вооружению, а именно к управляемым ракетам класса «воздух-воздух» средней и большой дальности, и может также использоваться при создании зенитных высотных ракет.
Известны разработки США в области ракет средней дальности типа AIM-120, AMRAAM. На их базе США ведут разработку новой управляемой ракеты «воздух-воздух» большой дальности (до 150 км). Также аналогичную разработку в Европе ведет корпорация «Матра» Бритиш аэроспейс (проект ракеты «Метеор», см. Зарубежное военное обозрение, №8, 2001 г., стр.36, 37).
Эту ракету предполагается оснастить комбинированной системой наведения, которая состоит из инерциальной системы управления (ИСУ) с радиокоррекцией от самолета-носителя или другого летательного аппарата, оборудованного соответствующей аппаратурой, и активной радиолокационной головкой самонаведения (АРГС). В качестве силовой установки ракеты намечается использовать прямоточный-воздушно-реактивный двигатель (ПВРД) с интегральной компоновкой, предусматривающей размещение в корпусе камеры дожигания маршевого двигателя твердотопливного ускорителя.
Планер ракеты «Метеор», выполненный по «нормальной» самолетной аэродинамической схеме, имеет большое значение поперечного V крыла (составляет 45°). Для аэродинамического управления и стабилизации используется крестообразное хвостовое оперение. Из представленных в указанном материале рисунков внешнего вида ракет следует, что два воздухозаборника расположены на одной (условно нижней) стороне ракеты и таким образом при маневре должен соблюдаться координированный разворот с управлением углом крена.
Разработка активно-пассивной радиолокационной ГСН ведется на базе ГСН французской ракеты «MICA». Для решения задачи попадания ракеты в цель или район цели используется метод пропорциональной навигации. При этом на среднем участке траектории должна использоваться двухсторонняя линия связи, обеспечивающая прием на ракете уточненных кинематических параметров цели, вычисленных с помощью бортового оборудования самолета-носителя, формирования на их основе модели движения цели и обратную передачу данных телеметрии бортовых систем ракеты.
Вышеописанная ракета «Метеор» выбрана в качестве прототипа предлагаемого изобретения как наиболее близкое по своей технической сущности решение, совпадающее по целому ряду признаков с предлагаемым изобретением.
Основной недостаток ракеты-прототипа заключается в малой маневренности ракеты при атаке целей, летящих на больших высотах (порядка 25...35 км), что обусловлено прежде всего выбранной двигательной установкой, поскольку она в данном случае существенно влияет на располагаемые перегрузки ракеты (для эффективного перехвата цели перегрузка ракеты np должна в несколько раз превышать перегрузку цели nц).
Действительно, тяга прямоточного воздушно-реактивного двигателя относительно невелика (на высоте 25...35 км для данного класса ракет тяга двигателя равна ≈50...100 кг), и, следовательно, при атаке высотных целей прирост располагаемых перегрузок за счет проекции N тяги двигателя Т на нормаль к ее вектору скорости (N=Т*sinα, где α - угол атаки) очень мал, а потому перегрузка ракеты должна практически полностью создаваться только за счет аэродинамических сил. Вследствие малых скоростных напоров q на больших высотах в этом случае требуются большие площади аэродинамических поверхностей либо снижение высоты применения, что крайне нежелательно.
Задачей данного изобретения является создание ракеты большой и средней дальности, которая бы при приемлемых для носителя габаритных размерах обладала необходимыми перегрузками, обеспечивающими перехват целей на высотах 25...35 км.
Для реализации задачи в управляемой ракете, содержащей корпус, систему наведения с инерциальной системой управления, приемным блоком линии радиокоррекции и головкой самонаведения, боевое снаряжение и двухимпульсную двигательную установку, включающую в себя камеру сгорания 1-го импульса с твердотопливным зарядом и блоки запуска первого и второго импульсов, камера сгорания второго импульса расположена последовательно с камерой сгорания первого импульса и также снабжена твердотопливным зарядом, при этом двухимпульсная двигательная установка имеет единое выходное сопло, расположенное на камере сгорания первого импульса, а система наведения дополнительно снабжена блоком определения момента запуска второго импульса в зависимости от дальности между ракетой и целью и относительной скорости их сближения и блоком поправок, определяющим прирост скорости ракеты от второго импульса в зависимости от высоты полета ракеты, абсолютной скорости ракеты и температуры заряда второго импульса, причем входы блока поправок и два входа блока определения момента запуска второго импульса соединены с соответствующими выходами инерциальной системы управления, а выход блока поправок соединен с третьим входом блока определения момента запуска второго импульса, выход которого связан с блоком запуска второго импульса.
Такое выполнение ракеты обеспечивает увеличение ее располагаемых перегрузок в районе цели за счет двух факторов:
- существенного увеличения проекции N тяги двигателя Т ракеты на нормаль к ее вектору скорости;
- увеличения скоростного напора q за счет увеличения скорости полета ракеты в районе цели.
Так, при угле атаки α=30° и реальной для твердотопливного заряда величине тяги последнего импульса Т=1000 кГс указанная проекция тяги составит N=500 кГс. При массе ракеты в конце активного участка полета Gp порядка 120 кг дополнительная перегрузка nдоп от тяги двигателя второго импульса составит около 4-х единиц.
Таким образом, если твердотопливный двигатель второго импульса ракеты запускать в такой момент времени, чтобы он работал практически до встречи с целью, то это позволило бы формировать управляющую перегрузку преимущественно за счет двигательной установки. На реализацию этого подхода и направлено предлагаемое изобретение, дающее возможность создания эффективной ракеты для поражения целей на высотах 25...35 км без существенного увеличения ее аэродинамических поверхностей.
Сущность предлагаемого изобретения поясняется графическим материалом, где:
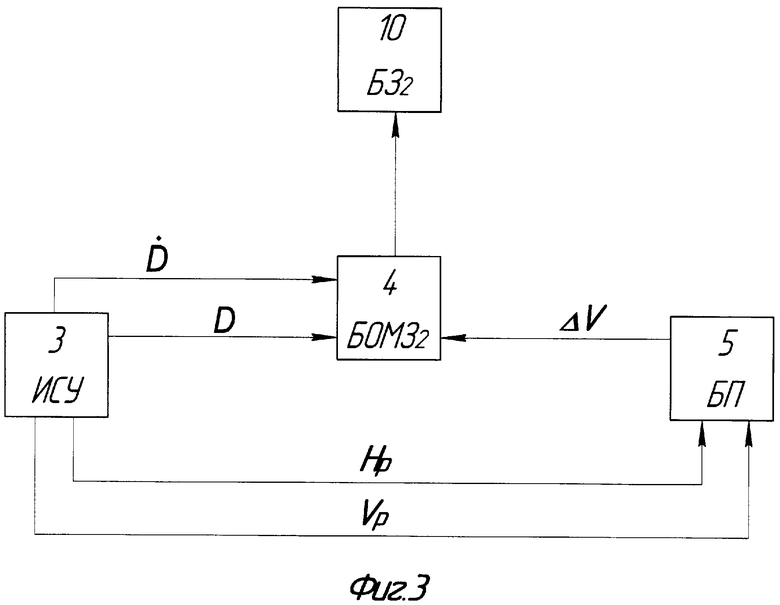
на фиг.1 изображен общий вид ракеты;
на фиг.2 - вид ракеты сзади;
на фиг.3 приведена структурная схема устройства для запуска второго импульса двигательной установки;
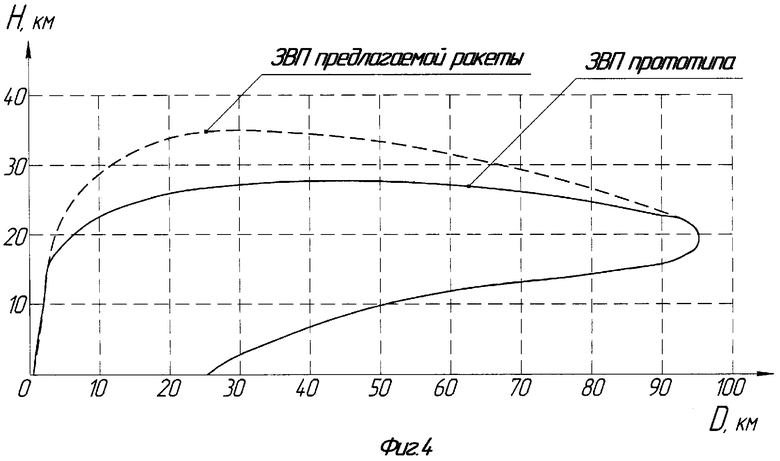
на фиг.4 приведены зоны возможных пусков в вертикальной плоскости прототипа и предлагаемой ракеты.
Ракета согласно изобретению содержит корпус 1, внутри которого размещены головка самонаведения 2, инерциальная система управления 3, блок определения момента запуска второго импульса (БОМЗ2) 4, блок поправок (БП) 5, боевое снаряжение 6, первый импульс двигателя 8 с блоком запуска 9, второй импульс двигателя 7 с блоком запуска (БЗ2) 10 и сопловой блок 11. На корпусе ракеты расположены четыре аэродинамических руля 12.
Функционирование ракеты с использованием 2-импульсного двигателя осуществляется следующим образом.
После старта с носителя за счет работы первого импульса двигателя ракета приобретает необходимую скорость и летит к цели в соответствии с законом пропорциональной навигации: n=k*ω, где n - перегрузка ракеты, k - коэффициент пропорциональности, ω - угловая скорость линии визирования "ракета-цель". Система наведения ракеты, получая по линии радиокоррекции от самолета-носителя информацию о взаимном расположении ракеты и цели, формирует в ИСУ текущие данные по величинам дальности ракеты до цели D, относительной скорости ракеты и цели D', а также определяет высоту Нр и скорость полета ракеты Vр.
Блок определения момента запуска второго импульса 4 получает текущие данные из ИСУ по величине дальности D ракеты от цели и относительной скорости D' ракеты и цели. Блок поправок 5, получая из ИСУ текущие данные по высоте Нр и скорости полета ракеты Vр, с учетом температуры заряда второго импульса Тз определяет расчетный прирост скорости от второго импульса ΔV=f1(Hp,Vp,Тз) и направляет полученную величину ΔV на третий вход блока определения момента запуска второго импульса 4.
Блок определения момента запуска второго импульса 4 на основании полученных данных и аппроксимации движения цели определяет время t=f2(D,D',ΔV) запуска твердотопливного двигателя второго импульса 7 из условия обеспечения расчетной встречи ракеты с целью примерно за 1...1.5 сек до полного окончания работы указанного двигателя и при подлете к цели в расчетный момент времени подает сигнал на блок 10 запуска второго импульса, который запускает твердотопливный двигатель второго импульса 7.
В результате на конечном активном этапе атаки цели суммарная перегрузка ракеты (от аэродинамических сил и от составляющей тяги двигателя) может достигать до 5 единиц, что обеспечивает гарантированный перехват цели на высоте до 35 км. На фиг.4 данное преимущество предлагаемой ракеты по сравнению с прототипом нашло свое отражение в виде существенного повышения высотности ракеты (на 7...8 км).
Следует отметить, что преимущество ракеты по предлагаемому изобретению наиболее полно проявляется на высотах, близких к предельным, поскольку возможности маневрирования цели на этих высотах ограничены величинами располагаемых перегрузок порядка 1...1.5 ед.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАКЕТА | 2014 |
|
RU2548957C1 |
| СПОСОБ СТРЕЛЬБЫ С ПАЛУБНОЙ ПУСКОВОЙ УСТАНОВКИ ПРОТИВОЛОДОЧНОГО РАКЕТНОГО КОМПЛЕКСА | 1995 |
|
RU2093783C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫСОКОМАНЕВРЕННОЙ РАКЕТОЙ | 1998 |
|
RU2146353C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339905C2 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВИЖНОЙ ЦЕЛИ УПРАВЛЯЕМЫМ СНАРЯДОМ С АКТИВНОЙ СИСТЕМОЙ НАВЕДЕНИЯ И ДОРАЗГОННЫМ ДВИГАТЕЛЕМ | 1999 |
|
RU2151370C1 |
| ДВУХСТУПЕНЧАТАЯ ПРОТИВОТАНКОВАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2012 |
|
RU2527610C2 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| КРЫЛАТАЯ РАКЕТА И СПОСОБ ЕЕ БОЕВОГО ПРИМЕНЕНИЯ | 2017 |
|
RU2713546C2 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339904C2 |

Изобретение относится к классу управляемых ракет «воздух-воздух» средней и большой дальности и может также использоваться при создании зенитных высотных ракет. Технический результат заключается в повышении маневренности ракеты при атаке высотных целей. Ракета содержит корпус, систему наведения с инерциальной системой управления, приемным блоком линии радиокоррекции и головкой самонаведения, боевое снаряжение и двухимпульсную двигательную установку, включающую двигатель первого импульса с твердотопливным зарядом и двигатель второго импульса. Ракета также содержит блоки запуска двигателей первого и второго импульсов. При этом двигатель второго импульса также выполнен с твердотопливным зарядом, а камера сгорания двигателя второго импульса расположена последовательно с камерой сгорания двигателя первого импульса, причем двухимпульсная двигательная установка выполнена с единым выходным соплом, расположенным на камере сгорания двигателя первого импульса, а система наведения дополнительно снабжена блоком определения момента запуска двигателя второго импульса и блоком поправок, определяющим прирост скорости ракеты от двигателя второго импульса, причем входы блока поправок и два входа блока определения момента запуска двигателя второго импульса соединены с выходами инерциальной системы управления, а выход блока поправок соединен с третьим входом блока определения момента запуска двигателя второго импульса, выход которого связан с блоком запуска двигателя второго импульса. 4 ил.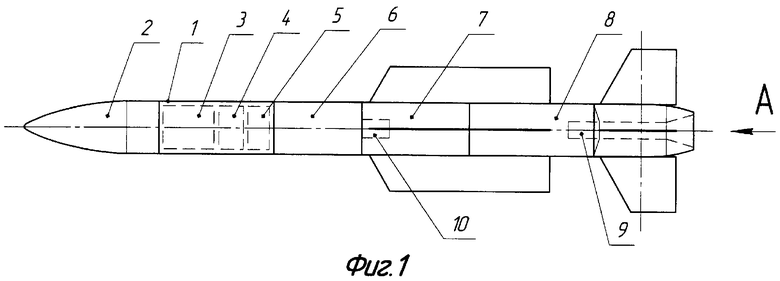
Ракета, содержащая корпус, систему наведения с инерциальной системой управления, приемным блоком линии радиокоррекции и головкой самонаведения, боевое снаряжение и двухимпульсную двигательную установку, включающую двигатель первого импульса с твердотопливным зарядом и двигатель второго импульса, блоки запуска двигателей первого и второго импульсов, отличающаяся тем, что двигатель второго импульса также выполнен с твердотопливным зарядом, камера сгорания двигателя второго импульса расположена последовательно с камерой сгорания двигателя первого импульса, при этом двухимпульсная двигательная установка выполнена с единым выходным соплом, расположенным на камере сгорания двигателя первого импульса, а система наведения дополнительно снабжена блоком определения момента запуска двигателя второго импульса и блоком поправок, определяющим прирост скорости ракеты от двигателя второго импульса, причем входы блока поправок и два входа блока определения момента запуска двигателя второго импульса соединены с выходами инерциальной системы управления, а выход блока поправок соединен с третьим входом блока определения момента запуска двигателя второго импульса, выход которого связан с блоком запуска двигателя второго импульса.
| Зарубежное военное обозрение, 2001, №8, с.36, 37 | |||
| АВИАЦИОННАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2004 |
|
RU2259536C1 |
| РАКЕТА, ВЫПОЛНЕННАЯ ПО АЭРОДИНАМИЧЕСКОЙ СХЕМЕ "УТКА" | 1997 |
|
RU2111446C1 |
| РАКЕТА | 1996 |
|
RU2094748C1 |
| Горный компас | 0 |
|
SU81A1 |
| Устройство для дистанционного программного управления электроприводными механизмами | 1984 |
|
SU1257614A1 |
| US 3063375 А, 13.11.1962. | |||

