Уровень техники
Настоящее изобретение относится к упаковке таких основных тарных изделий, как банки или бутылки в коробки и, в частности, относится к подаче коробок в сложенном состоянии из бункера и к передаче коробок к загрузочной стороне упаковочной машины.
В патенте Великобритании №2053133 предложено устройство для извлечения, сгибания заготовок коробок из стационарного накопителя и вертикальной установки и передачи заготовок. Упомянутое устройство содержит передаточные вакуумные элементы, которые установлены на четырехточечных рычажных механизмах и размещены на роторном носителе с кулачковым управлением. Во время поворота для облегчения извлечения заготовок имеет место неподвижное состояние вакуумных элементов. Во время передачи вертикально установленных заготовок к транспортировочному устройству вакуумные присосы перемещаются синхронно с транспортировочным устройством.
В патенте США №4625575 предложено кулачковое устройство для подающего механизма, в котором дисковый кулачок выполнен с образованием непрерывной рабочей поверхности кулачка и более плоской рабочей поверхности кулачка. Коромысла следящего элемента кулачка применяются для относительного перемещения в пределах первой и второй рабочих поверхностей кулачка. Захватное средство соединено с коромыслом кулачка эксцентриковым рычагом и рабочими поверхностями кулачка так, чтобы захватное средство перемещалось в выдвинутое наружу положение и во втянутое внутрь положение.
В патенте Германии №3525448 предложено устройство для подачи и вертикальной установки сложенных коробок из бункера, установленного под углом к вертикали. Устройство содержит поворотную раму, к которой через рычажный механизм прикреплены вакуумные присосы. По мере того, как рама поворачивается, вакуумные присосы втягиваются для извлечения сложенных коробок из бункера и затем одновременной передачи сложенных коробок и разделения их стенок. Втягиваемый рычажный механизм является сложным и, следовательно, дорогостоящим в изготовлении и обслуживании.
В патентной публикации WO 98/52825 предложен роторный подающий механизм для подачи заготовок из наклонного бункера.
Вышеописанный известный уровень техники относится к средству захвата коробок, которое непрерывно вращается, чтобы обеспечивать извлечение и ускоренное движение коробок для согласования с производительностью машины. С передачей коробок связана одна проблема, заключающаяся в том, что объединение функций извлечения и ускорения ограничивает скорости машины, так как извлечение коробок роторным подающим устройством ограничено вращательным действием.
Настоящее изобретение так же, как и его предпочтительный вариант осуществления, предназначено для преодоления или, по меньшей мере, смягчения проблем, связанных с известным уровнем техники.
Сущность изобретения
В соответствии с одним аспектом изобретения создано устройство для последовательного манипулирования сложенными коробками с противоположно расположенными панелями с соприкасающимися поверхностями из пункта подачи бункера и для передачи коробок к загрузочной стороне упаковочной машины, содержащее средство захвата коробок для последовательного зацепления одной из упомянутых панелей с соприкасающимися поверхностями и для извлечения из бункера сложенной коробки. Средство захвата коробок соединено с осью рамой и выполнено с возможностью перемещения для перемещения заготовки в плоскости, поперечной движению коробок, при этом рама закреплена с возможностью скольжения на люнетной конструкции для перемещения рамы в ходе линейного действия относительно поворотного передаточного механизма для передачи коробки далее для дополнительной обработки.
По выбору, коробка передается в ускоряющее средство для ее ускорения до скорости, согласованной со скоростью упаковочной машины.
В некоторых вариантах осуществления линейное перемещение средства захвата коробок непосредственно до и во время извлечения коробки из бункера приостанавливается на короткий промежуток времени действием кулачковой штанги с кулачковым управлением, которая выполнена с возможностью радиального смещения во время упомянутого короткого промежутка времени и которая оперативно соединена со средством захвата коробок.
В других вариантах осуществления средство захвата коробок содержит источник вакуума и вакуумный присос.
Для управления скоростью поперечного и линейного перемещений и, при необходимости, ускоряющим средством может быть использован контроллер.
В соответствии со вторым аспектом настоящего изобретения создан способ последовательного манипулирования сложенными коробками с противоположно расположенными панелями с соприкасающимися поверхностями из пункта подачи бункера и передачи коробок к загрузочной стороне упаковочной машины, при котором извлекают коробки в направлении, поперечном движению коробок, опускают коробки на ускоряющее средство и ускоряют коробки для согласования со скоростью передаточного устройства в пункте загрузки машины.
Краткое описание чертежей
Ниже приведено описание вариантов осуществления изобретения, только в качестве примеров, со ссылками на прилагаемые чертежи, на которых:
фиг.1 и 2 - виды в перспективе механизма подачи заготовок коробок для упаковочной машины в соответствии с одним аспектом настоящего изобретения;
фиг.3 - упрощенный чертеж, иллюстрирующий механизм подачи и передачи заготовок;
фиг.4-9 иллюстрируют способ подачи заготовки из бункера в передаточный механизм.
Подробное описание предпочтительного варианта осуществления изобретения
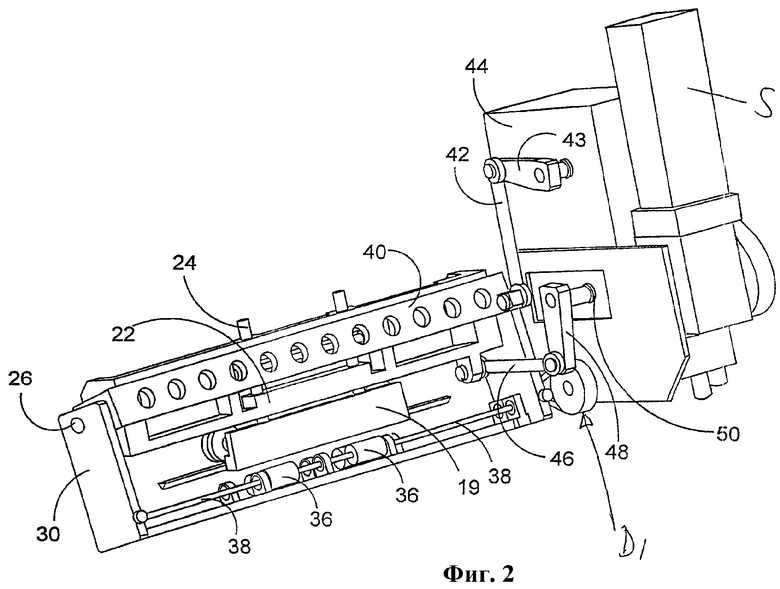
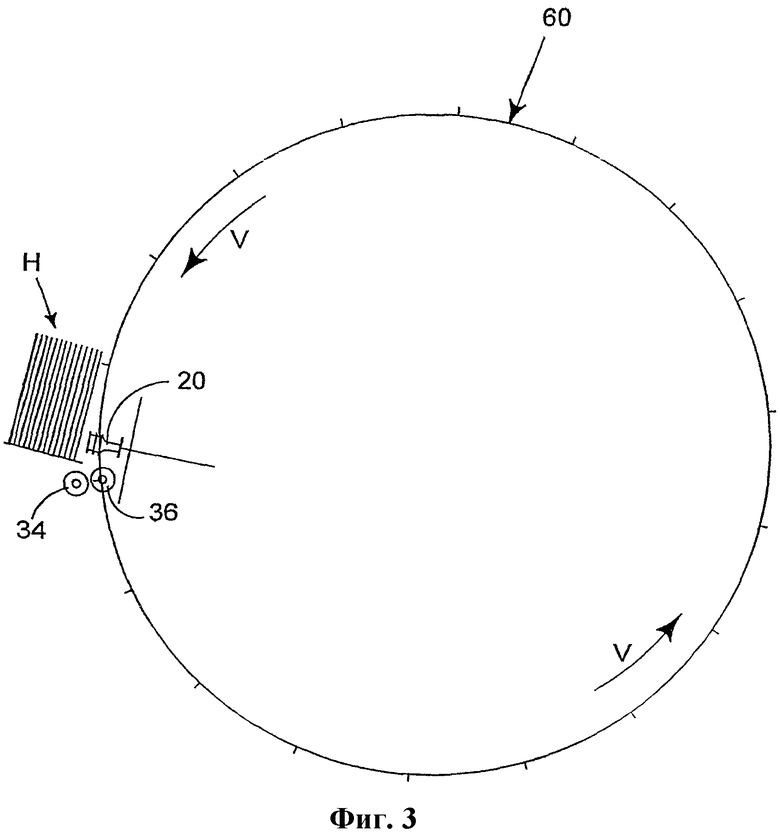
На фиг.1, 2 и 3 показан подающий механизм 10 машины для обработки заготовок коробок. Передняя сторона упаковочной машины содержит бункер H, в котором множество коробок в плоском сложенном состоянии содержатся в готовности к обработке. Как показано на фиг.3, коробки извлекаются из бункера H последовательно подающим механизмом 10 и передаются в механизм 60 передачи заготовок или транспортер для дальнейшей обработки.
Подающий механизм 10 содержит средство 12 захвата коробок для извлечения нижней, наиболее плотно сложенной коробки из бункера. В данном варианте осуществления, средство захвата коробки содержит множество вакуумных присосов 14, 16, 18, 20, например, четыре вакуумных присоса, каждый из которых опирается на держатель присосов и раму 19. Рама 19 держателей присосов установлена неподвижно, на, соответственно, удлиненных опорных стержнях 24. В вариантах осуществления одной категории, стержни 24 установлены с возможностью скольжения на люнетной конструкции 22, которая установлена с возможностью поворота на осях 26, 28. Как правило, оси 26, 28 опираются концами на подходящие подшипниковые конструкции, которые являются обычными и устанавливаются в боковой раме. Подходящий приводной механизм, например серводвигатель, обеспечивает поворот оси 26 в поперечном направлении Y-Y' (см. фиг.4, 5 и 7) в соответствии с нижеприведенным подробным описанием.
Для перемещения скользящих стержней 24 в процессе возвратно-поступательного линейного действия в люнетной конструкции 22, скользящие стержни соединены с опорной рамой 40, показанной на фиг.2, для передачи линейного движения от приводного средства.
Подающее устройство приводится в действие подходящим приводным механизмом, например, серводвигателем S, приводящим в движение приводной ремень D для передачи приводного движения на пару шаговых механизмов 44, 50. Шаговые механизмы 44, 50 преобразуют непрерывное входное приводное движение в возвратно-поступательное и, дополнительно, прерывистое выходное приводное движение.
Для сообщения линейного движения захватному средству, рычажные механизмы 43 и 42, которые шарнирно соединены между собой, соединяют выход привода с опорной рамой 40. Таким образом, когда рычажный механизм 43 поворачивается вперед-назад, рычажный механизм 42 приводится в движение в направлениях X-X' линейного движения (см. фиг.1, 5, 6, 7 и 8), приводящего к линейному движению рамы 19 в том же направлении.
Аналогично для сообщения поперечного перемещения захватному средству, рычажные механизмы 48 и 46, которые шарнирно соединены между собой, соединяют выход привода с люнетной конструкцией. Таким образом, когда рычажный механизм 48 поворачивается вперед-назад, рычажный механизм 46 приводится в движение в направлениях Y-Y' линейного движения, приводящего к поперечному маховому движению (вокруг осей 26, 28) рамы 19 в том же направлении.
В данном варианте осуществления предполагается, что подающий механизм 10 снабжен девакуумирующим устройством, которое применяется в сочетании с источником вакуума для установки вакуумного соединения и моментов отсечки, тем самым определяя, когда коробка удерживается подающим механизмом 10.
Хотя использование вакуумных присосов для подачи коробок на транспортер предпочтительно, предполагается, что настоящее изобретение можно применять или приспособить к применению захватных средств других типов, например грейферы, не выходя из объема изобретения.
Для ускорения коробок после их извлечения из бункера H имеются ускоряющие ролики 34, 36. В данном варианте осуществления используются две пары ускоряющих роликов, расположенных с примыканием один к другому, чтобы обеспечивать зажимную загрузочную позицию N для приема передней кромки коробки и допускать в данной позиции сквозной проход заготовки коробки. Ускоряющие ролики 34, 36 установлены на приводных осях 32, 38, которые приводятся в движение подходящим приводным средством D1.
Ускоряющие ролики 34, 36 установлены на подающей раме 30, которая может быть установлена на установочной машине или выполнена отдельным модулем. Предполагается, что подающий механизм можно встраивать в новое механическое оборудование или устанавливать на существующее механическое оборудование при модернизации.
Бункер H в предпочтительном варианте относится к типу устройств с «гравитационной подачей», вследствие чего заготовки коробок содержатся в бункере под наклоном для обеспечения принудительной подачи, и поэтому обеспечивается непрерывная подача коробок.
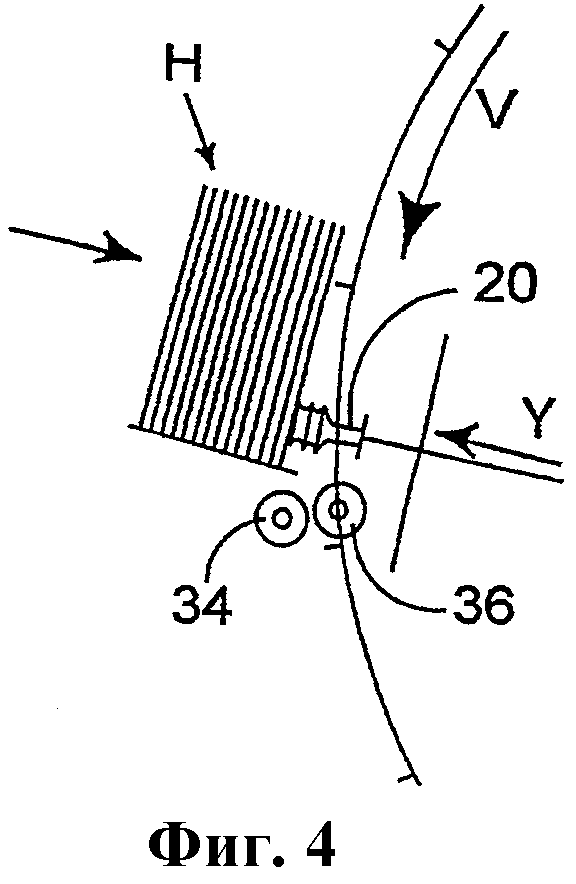
Далее следует описание способа передачи со ссылками на фиг.4-9. Для передачи заготовки из наклонного положения, подающий механизм 10 непрерывно и последовательно подает коробки из бункера в загрузочный передаточный механизм, который постоянно вращается в направлении V, указанном стрелкой, как показано на фиг.3.
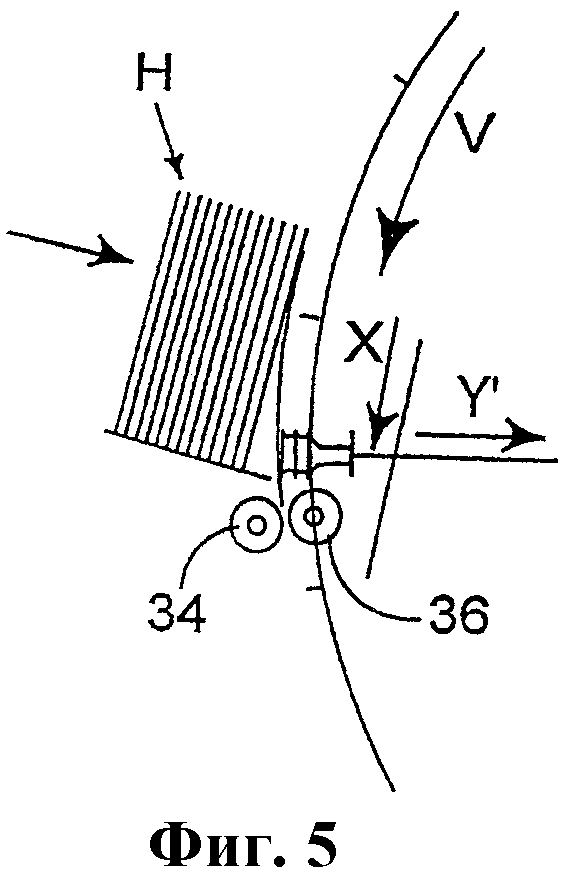
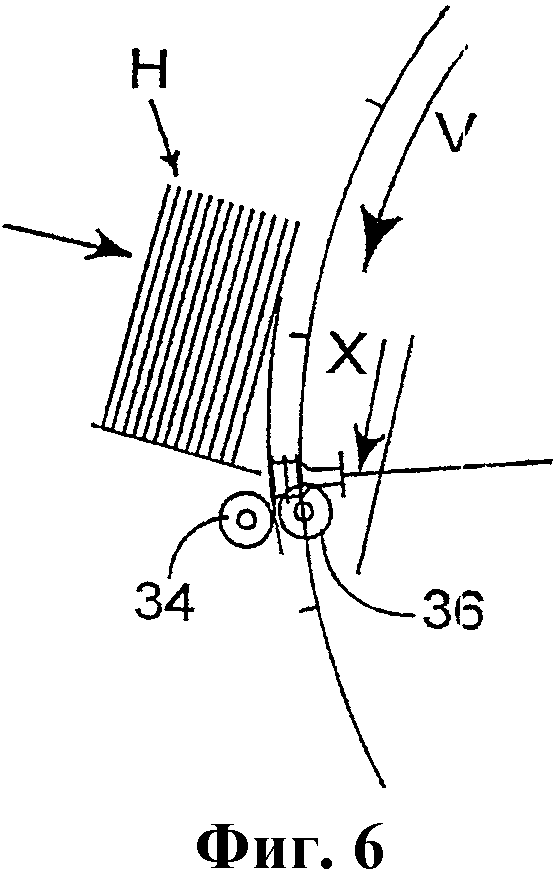
Первый этап, показанный на фиг.4, заключается в перемещении захватного средства 12 в поперечном направлении Y к бункеру H. Вакуумный присос 20 приводится в контакт с боковой стенкой коробки. Затем, на комплект вакуумных присосов подается вакуум от источника вакуума. Таким образом, коробка извлекается перемещением захватного средства в поперечном направлении Y. Как только коробка переместится в поперечном направлении, вакуумный присос 20 передвигается вниз по направлению X линейного движения для перемещения коробки к ускоряющим роликам 34, 36, как показано на фиг.5. Затем коробка принимается в зажимную загрузочную позицию роликов и ускоряется, как показано на фиг.6. Вакуум в таком случае поддерживается во время данного этапа передачи, чтобы вакуумные присосы удерживали боковую стенку коробки.
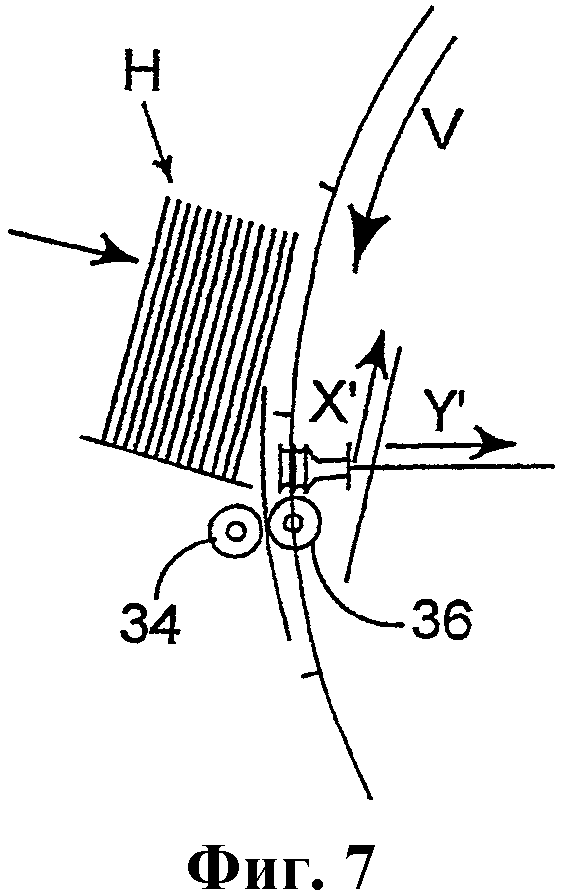
После того, как коробка устанавливается на роликах, девакуумирующее устройство отсоединяет источник вакуума от вакуумных присосов для отпускания коробки перемещением вакуумного присоса в направлениях X', Y' поперечного и линейного движений, как показано на фиг.7.
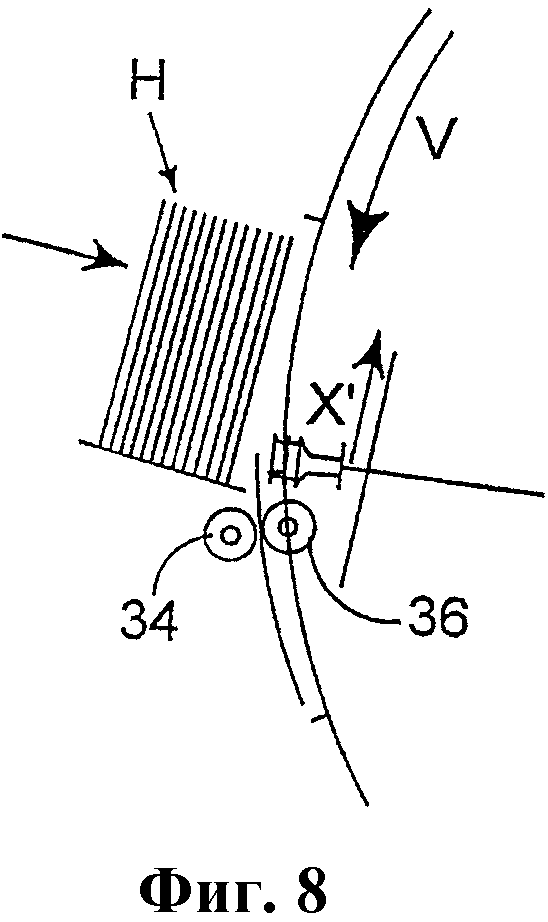
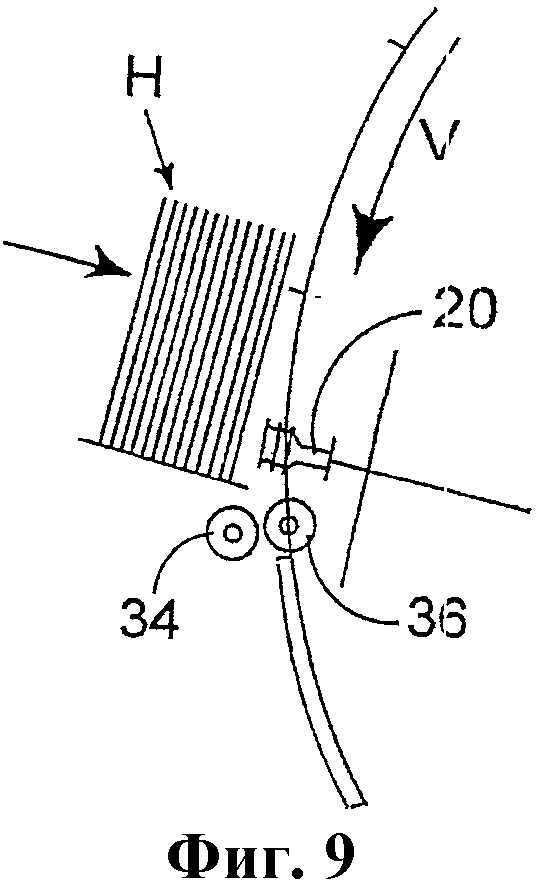
Ускоряющие ролики 34, 36 ускоряют заготовку, которая затем помещается в контакте с направляющим выступом транспортировочной установки, показанной, в общем, на фиг.8. Выступы поддерживают положение коробки и перемещают коробку дальше по ходу к установочной станции. В то же время, вакуумный присос 20 возвращается к исходному положению, показанному на фиг.9.
Из фиг.4-9 очевидно, что по мере того, как подающее устройство извлекает коробки и манипулирует ими, данные коробки также переносятся по траектории вращательного перемещения передаточного механизма.
Подающий механизм 10 и передаточный механизм управляются контроллером для согласования скоростей прохождения коробок.
Предполагается, что регулировками машины управляет компьютерная программа, которая позволяет автоматизировать настройку и тем самым сократить до минимума время простоя машины. Например, можно повышать или снижать при необходимости скорость подающего устройства или можно увеличивать или уменьшать вектора ускорений для изменения угла перемещения.
Установлено, что путем разделения функций извлечения и ускорения коробки на две отдельные функции, можно увеличить скорости прохождения, поскольку уменьшается риск повреждения коробки.
Машину в соответствии с настоящим изобретением можно регулировать во многих отношениях, чтобы обеспечивать возможность обработки коробок, вмещающих многочисленные формы групп изделий для создания ассортимента коробок с размерами и формой, например под число бутылок от четырех до восьми, без излишних значений времени простоя, затрачиваемого на регулировку машин. Действительно машину можно легко адаптировать для обработки коробок так, чтобы производить широкий ассортимент коробок с многочисленными формами под группы изделий.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ ЗАХВАТА И СБОРКИ ЗАГОТОВОК КАРТОННЫХ КОРОБОК | 1995 |
|
RU2136503C1 |
| УПАКОВОЧНАЯ МАШИНА И СПОСОБ УПАКОВЫВАНИЯ ИЗДЕЛИЙ | 2009 |
|
RU2503596C2 |
| УСТРОЙСТВО И СПОСОБ ИЗГОТОВЛЕНИЯ УПАКОВОК ДЛЯ СОСУДОВ | 2004 |
|
RU2334668C2 |
| УСТРОЙСТВО И СПОСОБ СНИЖЕНИЯ УСИЛИЙ ВОЗВРАТА ЗАГОТОВОК ПАКЕТОВ В РАЗЛИВОЧНОЙ МАШИНЕ | 2013 |
|
RU2595011C2 |
| УСТРОЙСТВО ДЛЯ ОТКАЛЫВАНИЯ НАБЕЛЯ КОНУСА ЭЛЕКТРОННО-ЛУЧЕВОЙ ТРУБКИ | 1991 |
|
RU2116980C1 |
| ДВОЙНАЯ УПАКОВОЧНАЯ ЛИНИЯ И СИСТЕМА ДОЗИРОВАНИЯ | 2009 |
|
RU2511317C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ПАКЕТОВ В КАРТОННЫЕ КОРОБКИ | 2009 |
|
RU2481257C2 |
| УПАКОВОЧНЫЙ АППАРАТ | 2009 |
|
RU2536445C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ УПАКОВОК В КАРТОННУЮ КОРОБКУ | 2013 |
|
RU2608715C2 |
| Устройство для укладки в коробки штучных предметов | 1972 |
|
SU440304A1 |
Изобретение относится к упаковке таких основных тарных изделий, как банки или бутылки, в коробки и, в частности, относится к подаче коробок в сложенном состоянии из бункера и к передаче коробок к загрузочной стороне упаковочной машины. Устройство содержит средство захвата коробок, предназначенное для последовательного зацепления одной из сложенных коробок с соприкасающимися поверхностями и для извлечения ее из бункера. Средство захвата соединено с осью рамой и выполнено с возможностью перемещения, позволяющего переместить заготовку в плоскости, поперечной движению коробок. Рама закреплена с возможностью скольжения на люнетной конструкции для перемещения рамы в ходе линейного действия относительно поворотного передаточного механизма, который обеспечивает передачу коробки далее для дополнительной обработки. Достигается упрощение конструкции, повышение производительности. 2 н. и 14 з.п. ф-лы, 9 ил.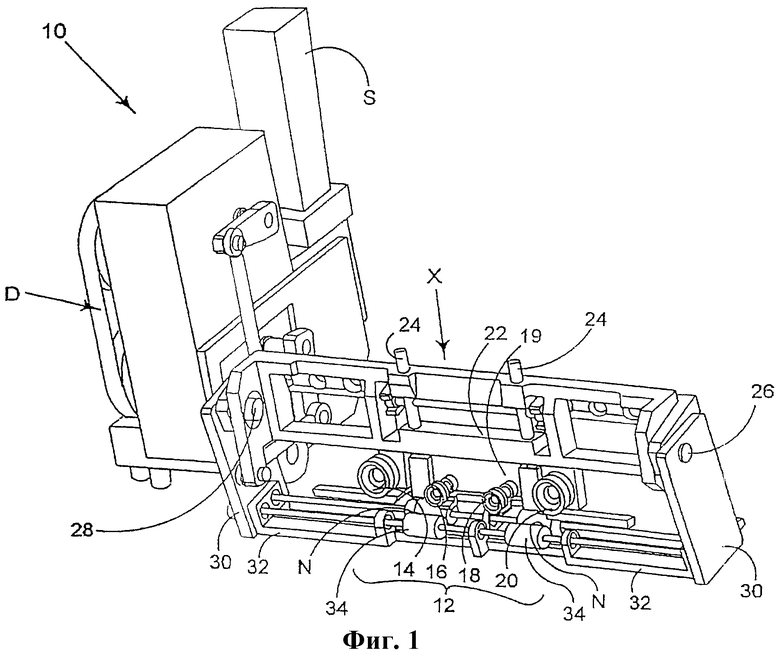
| Измерительный преобразователь | 1985 |
|
SU1262410A2 |
| ЕР 1136363 А2, 26.01.2001 | |||
| Устройство для поштучной подачи картонных плоскосложенных коробок | 1987 |
|
SU1465352A1 |
| Устройство для поштучной выдачи картонных плоскосложенных коробок и их формирования | 1987 |
|
SU1446032A1 |

