Изобретение относится к устройствам подшипников скольжения, содержащим постоянные магниты с вертикально расположенной несущей осью вращения, применяемым в станках по обработке материалов, в генераторах электрического тока, в транспортных средствах, и может быть использовано в промышленности строительных материалов, в химической, в сельскохозяйственной и в др.
Известно устройство подшипников скольжения, включающее неподвижный корпус, вкладыши в нем и основание с крепежными отверстиями /1/.
Недостатками устройства подшипника скольжения являются применение дорогостоящего смазочного материала, необходимого в связи с конструктивной частью корпуса и его деталей, требуемые высокие скорости вращения и температурный режим, соответствующий строго определенной консистенции смазочного материала, особенно в опорах подшипников вертикальных валов. Уменьшение скорости скольжения или увеличение температуры подшипника способствует нарушению режима жидкостного трения.
Цель изобретения - расширение ассортимента подшипников скольжения, снижение энергозатрат и стоимости, а также повышение стабильности работоспособности при вертикальном расположении подвижной оси вращения.
Цель достигается тем, что устройство подшипника скольжения из постоянных магнитов с вертикально расположенной несущей осью вращения включает неподвижный корпус, состоящий из трех самостоятельных частей, одна из которых соединяется с другой путем предусмотренной винтовой резьбы, выполненной у них в месте их соединения, а две другие соединяются крепежными изделиями, устройство также содержит постоянные магниты на внутренних поверхностях неподвижного корпуса, основание с крепежными отверстиями, размещенную по центру резервуара корпуса подвижную вертикальную ось с постоянными магнитами на ее поверхности, верхний конец которой свободный, торговую крышку к неподвижному корпусу с наружной резьбой на ее реборде и с круглым отверстием по ее центру для выведения через него свободного конца подвижной вертикальной оси, кольцевой постоянный магнит на внутренней поверхности крышки к неподвижному корпусу, совмещенный отверстиями, дополнительно стабилизирующий вертикальное вращение подвижной вертикальной оси диск, прикрепленный к нижнему торцу подвижной вертикальной оси, и прочно соединенное с краем диска внутренней стороной ленточное кольцо, несущее наружной стороной постоянные магниты, а также постоянные магниты на верхней и нижней поверхностях диска.
Применяемые постоянные магниты не содержат внешнего источника намагничивающей силы.
Все постоянные магниты, размещенные противоположно одноименными полюсами, закреплены на расстоянии 0,1lмп÷0,6lмп по нормали к их рабочим площадям, где lмп - расстояние начала нулевого реагирования между постоянными магнитами, а обозначение ″мп″ расшифровывается как магнитное поле, окружающее постоянные магниты.
Преимущественная особенность такого подшипника скольжения заключается в том, что при вращательном движении вертикальной оси скольжение осуществляется между отдаленными слоями воздуха путем организации сжатых магнитных полей, и соответствующий этому низкий коэффициент трения достигается без применения каких-либо смазочных материалов.
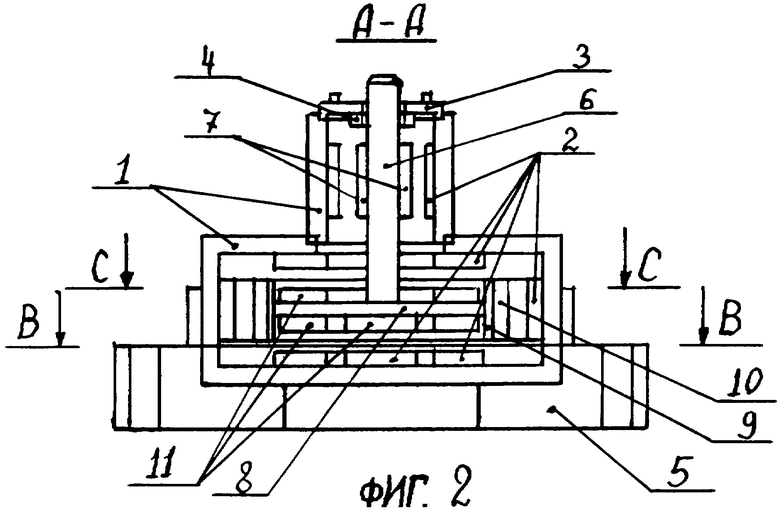
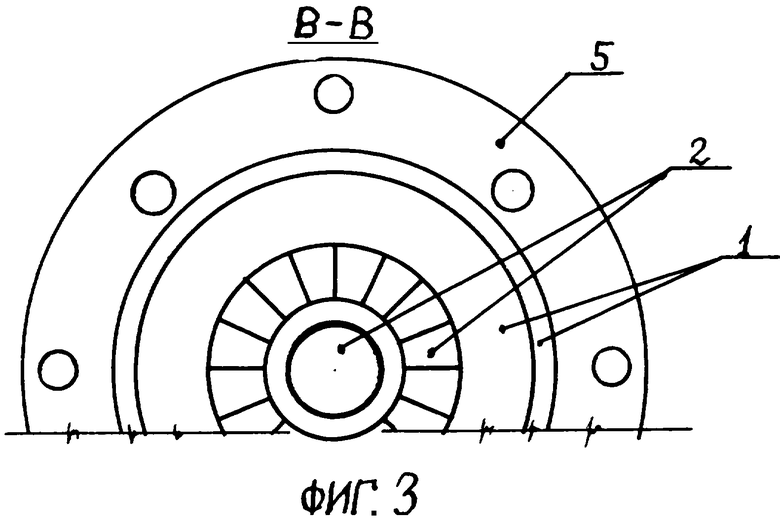
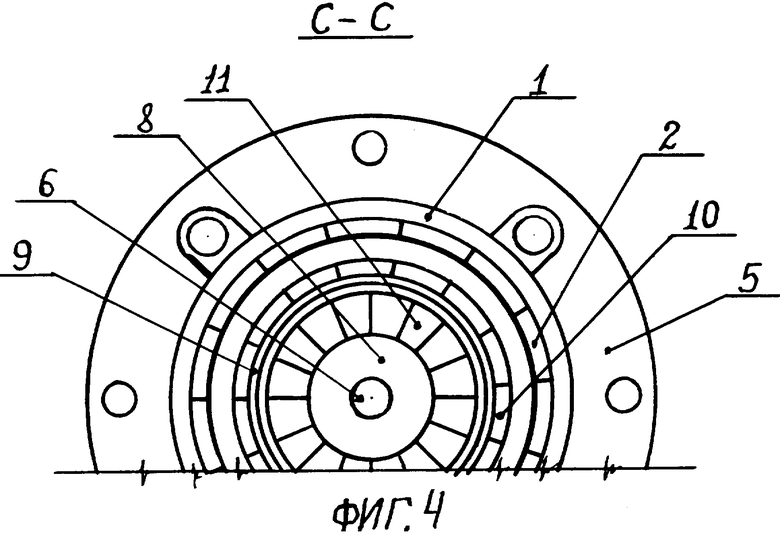
На фиг.1 представлен вид сверху устройства подшипника скольжения из постоянных магнитов с вертикально расположенной несущей осью вращения; на фиг.2 - разрез А-А на фиг.1; на фиг.3 - разрез B-B на фиг.2; на фиг.4 - разрез С-С на фиг.2.
Устройство содержит неподвижный корпус 1, состоящий из трех частей, размещенные на внутренней поверхности корпуса постоянные магниты 2, торцевую крышку 3 к корпусу с круглым отверстием по ее центру и размещенный на внутренней поверхности крышки кольцевой постоянный магнит 4, снаружи корпуса - основание 5, подвижную вертикальную ось 6 и размещенные на поверхности оси постоянные магниты 7, прикрепленный к нижнему торцу подвижной вертикальной оси стабилизирующий вертикальное вращение оси диск 8 и жестко соединенное внутренней стороной с краем диска ленточное кольцо 9, несущее с наружной стороны постоянные магниты 10, и постоянные магниты 11 на верхней и нижней поверхностях диска.
Подсоединение предлагаемого подшипника скольжения к вращающейся части транспортного средства осуществляется традиционными методами.
Сущность стабилизирующего состояния подвижной оси вращения заключается в том, что предложенная система в устройстве при наклоне ее на угол в пределах 0-90° сохраняется без смещения отдельных деталей и узлов.
Площади S рабочих полюсов постоянных магнитов, размещенных напротив одноименными полюсами, находятся в прямой зависимости от полной нагрузки G, несущей подвижной вертикально расположенной осью вращения, где полная нагрузка соответствует сумме груза Ргр и веса рс подвижной системы устройства.
Стабильное состояние подвижной оси вращения предложенной системы устройства подшипника скольжения описывается формулой:
Fот≥G·Sinα
где Fот - суммарная сила отталкивания противоположных магнитов - неизменная величина. В системе пары подвижного и неподвижного магнитов Fот=2Fм, т.е. сила отталкивания равна сумме сил отталкивания двух постоянных магнитов;
G - полная нагрузка, α - возможно предельный угол наклона системы устройства.
Устройство работает следующим образом.
Собранный подшипник скольжения основанием 5 закрепляется на специально предусмотренной рабочей платформе в специально определенном технологическом процессе или в транспортном средстве. Известными традиционными методами подсоединяют свободные наружный верхний конец подвижной оси 6 подшипника скольжения к вращающейся части технологического аппарата или транспортного средства. У предложенного устройства, находящегося в рабочем состоянии, вращается подвижная ось 6 и с ней одновременно постоянные магниты 7, диск 8, ленточное кольцо 9 и постоянные магниты 10 и 11. Невращающиеся постоянные магниты 2 сближены одноименными полюсами с постоянными магнитами 7, 10 и 11 до расстояния воздушного зазора 0,1lмп÷0,6lмп, при котором выполняется условие: Fот≥G·Sinα.
При вертикальном расположении оси 6 для пар постоянных магнитов 2 и 11 рабочее состояние системы соответствует ее работе при угле наклона, равном 90°. Следовательно, сила отталкивания Fот постоянных магнитов равна полной нагрузке G·Sin90° или больше, за счет чего система уравновешена и работает стабильно. Но при этом для пар постоянных магнитов 2 и 10, 2 и 7 рабочее состояние системы соответствует ее работе при угле наклона, равном 0°. Следовательно, сила отталкивания Fот постоянных магнитов больше G·Sin0°. Правая часть формулы стабильного состояния объясняет, что пары постоянных магнитов 2 и 10, 2 и 7 не находятся под какой-либо внешней нагрузкой G и смещение оси 6 в сторону от ее вертикали по горизонтали исключается.
При расположении подшипника скольжения с отклонением от горизонтали на угол α соответственно полная нагрузка G перераспределяется по парам постоянных магнитов (2, 10 и 2, 7), соответственно углу α находятся также под частичной нагрузкой G. Подшипник скольжения работоспособен стабильно, так как согласно правой части формулы стабильного состояния Fот>G·Sinα, где α<90°, суммарная сила отталкивания Fот всех пар постоянных магнитов значительно больше полной нагрузки G.
Пример. Подшипник скольжения из постоянных магнитов с вертикально расположенной несущей осью вращения.
Конструктивные параметры устройства.
Общий диаметр оси G с установленными на ней постоянными магнитами 7 равен: ⊘=25×10-3 м.
Длина постоянных магнитов 7 равна: l=30×10-3 м.
Суммарная рабочая площадь постоянных магнитов 7 равна: S=2355×10-6 м2.
Диаметр диска 8 равен: ⊘=62×10-3 м.
Длина ленты толщиной 5×10-3 м и шириной 20,6×10-3 м ленточного кольца 9 равна: lл=226,08×10-3 м.
Установленные магнитные элементы 2, 10 и 11 имеют длину 20,6×10-3 м, ширину 11,8×10-3 м и толщину 6,2×10-3 м.
Технологические параметры устройства.
Сила отталкивания магнитного элемента равна: Fот=11,3 Н. Площадь рабочей поверхности полюса магнитного элемента равна: Sп.м.=221,76×10-6 м2.
Магнитные элементы 11 установлены сверху и снизу по краю диска 8, а также снизу по его центру. На внутренней поверхности корпуса 1 установлены магнитные элементы 2. Они расположены напротив одноименными полюсами к магнитным элементам 11. По наружной поверхности ленточного кольца 9 и по внутренней поверхности корпуса 1 установлены противоположно навстречу одноименными полюсами соответственно магнитные элементы 10 и 2.
Воздушный зазор между одноименными полюсами постоянных магнитов равен: δ=10,2×10-3 м.
Нагрузка на верхнем конце оси G равна: G=78,43 Н.
Суммарная сила отталкивания снизу диска 8 равна: 
Суммарная сила отталкивания сверху диска 8 равна: 
Суммарная сила отталкивания по ленточному кольцу 9 равна:
При наклоне всей системы устройства на угол α=0° подшипник скольжения находится в рабочем положении с вертикально установленной осью вращения. Суммарная сила отталкивания 180,13 Н, направленная перпендикулярно к диску 8, значительно больше нагрузки G и обеспечивает условия стабильной работы подшипника скольжения. Ленточное кольцо 9 при этом не имеет какой-либо внешней нагрузки и дополнительно обеспечивает неизменность вертикальности оси вращающейся части подшипника скольжения, несущего нагрузку, равную 78,43 Н.
При угле наклона, например, α=30°, часть нагрузки, равная 39,22 Н, воздействует на ленточное кольцо 9. Эта часть нагрузки нейтрализуется суммарной силой отталкивания, равной 118,65 Н, ленточного кольца 9. В создавшихся условиях наклона под углом 30° обеспечивается неизменное расположение оси вращения в системе устройства, а следовательно, и стабильная работа подшипника скольжения.
Условия стабильности работы: Fот≥G·Sinα
- по диску 8, 180,13>78,43×Sin(90-30°)
- по ленточному кольцу 9, 118,65>78,43×Sin30°.
Использование в промышленности предложенного устройства подшипника скольжения из постоянных магнитов с вертикально расположенной несущей осью вращения позволит расширить их ассортимент, снизить энергозатраты и стоимость за счет исключения дорогостоящего дефицитного смазочного материала, а также в роторных технологических процессах, предусматривающих плавное скоростное перемещение продукции, так как устройство одновременно обладает и амортизационными свойствами.
Предложенный подшипник скольжения, обладая исключительной новизной и, по существу, коэффициентом трения, равным нулю, предназначен для использования в устройстве, например, в части опоры для вертикально расположенной несущей оси, по заявке на изобретение от 28.07.2005 года с регистрационным №2005123992 "Способ получения электрического постоянного тока и устройство для его осуществления". Это позволит увеличить скорость вращения без дополнительных затрат, а значит повысить мощность и КПД предложенного генератора постоянного электрического тока.
Источники информации
1. В.И.Анурьев. Справочник конструктора машиностроителя, том 2, М., Машиностроение, 1983 год, стр.28-60.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОВОЛНОВОЙ ФРИКЦИОННЫЙ ВАРИАТОР (ВАРИАНТЫ) | 1997 |
|
RU2138709C1 |
| СПОСОБ СНИЖЕНИЯ КОЭФФИЦИЕНТА ТРЕНИЯ В ПОДШИПНИКАХ СКОЛЬЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2311571C2 |
| КОНТРОЛЛЕР ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2006 |
|
RU2349981C2 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ СИЛОВОГО ВЗАИМОДЕЙСТВИЯ ФЕРРОМАГНИТНЫХ ТОРОИДОВ | 2009 |
|
RU2405164C1 |
| МОЩНЫЙ ВЫСОКОСКОРОСТНОЙ МАГНИТНЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2168841C2 |
| Электродвигатель-маховик с электромагнитным подвесом ротора | 1981 |
|
SU964883A1 |
| ЭЛЕКТРОМАШИНА | 2013 |
|
RU2541356C1 |
| ГИБРИДНЫЙ МАГНИТНЫЙ ПОДШИПНИК С ОСЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2540215C1 |
| Радиально-упорный магнитный подшипник | 2019 |
|
RU2714055C1 |
| БЕЗКИВКОВАЯ ЗИМНЯЯ УДОЧКА С МАГНИТНОЙ БАЛАНСИРОВКОЙ И МОДУЛЕМ СВЕТОВОЙ И ЗВУКОВОЙ СИГНАЛИЗАЦИИ | 2018 |
|
RU2687147C1 |
Изобретение относится к устройствам подшипников скольжения, содержащим постоянные магниты с вертикально расположенной несущей осью вращения, применяемым в станках по обработке материалов, в генераторах электрического тока, в транспортных средствах, в промышленности строительных материалов, в химической, сельскохозяйственной и в др. Устройство подшипника скольжения содержит неподвижный корпус и основание с крепежными отверстиями. Корпус состоит из трех частей, одна из которых соединяется с другой путем предусмотренной резьбы, выполненной у них в месте их соединения, а две другие соединяются крепежными изделиями. Устройство также содержит магниты на внутренних поверхностях корпуса, основание с крепежными отверстиями, размещенную по центру резервуара корпуса подвижную вертикальную ось с магнитами на ее поверхности, верхний конец которой свободный, торцевую крышку к корпусу с наружной резьбой на ее реборде и с отверстием по ее центру для выведения через него свободного конца оси, кольцевой магнит на внутренней поверхности крышки к корпусу, совмещенный отверстиями. Диск прикреплен к нижнему торцу оси, с краем которого прочно соединено внутренней стороной ленточное кольцо, несущее наружной стороной магниты. На верхней и нижней поверхностях диска расположены магниты. Технический результат: расширение ассортимента подшипников скольжения, снижение энергозатрат и стоимости, а также повышение стабильности работоспособности при вертикальном расположении подвижной оси вращения. 4 ил.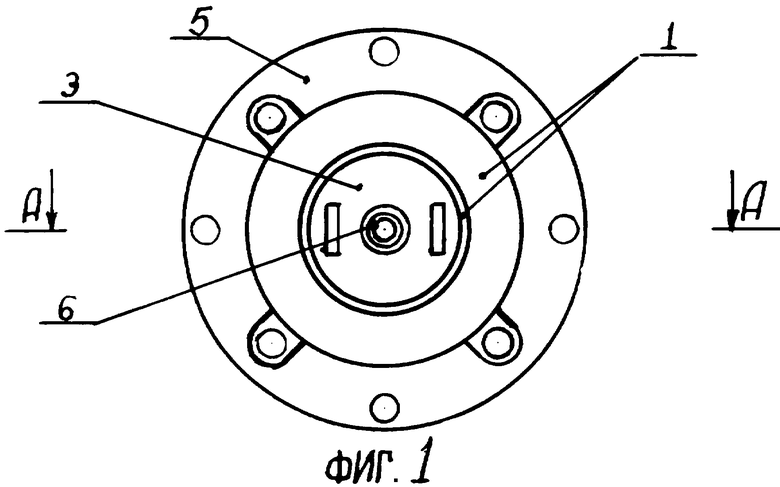
Устройство подшипника скольжения из постоянных магнитов с вертикально расположенной несущей осью вращения, содержащее неподвижный корпус и основание с крепежными отверстиями, отличающееся тем, что неподвижный корпус состоит из трех самостоятельных частей, одна из которых соединяется с другой путем предусмотренной винтовой резьбы, выполненной у них в месте их соединения, а две другие соединяются крепежными изделиями, устройство также содержит постоянные магниты на внутренних поверхностях неподвижного корпуса, основание с крепежными отверстиями, размещенную по центру резервуара корпуса подвижную вертикальную ось с постоянными магнитами на ее поверхности, верхний конец которой свободный, торцевую крышку к неподвижному корпусу с наружной резьбой на ее реборде и с круглым отверстием по ее центру для выведения через него свободного конца подвижной вертикальной оси, кольцевой постоянный магнит на внутренней поверхности крышки к неподвижному корпусу, совмещенный отверстиями, дополнительно стабилизирующий вертикальное вращение подвижной вертикальной оси диск, прикрепленный к нижнему торцу подвижной вертикальной оси, и прочно соединенное с краем диска внутренней стороной ленточное кольцо, несущее наружной стороной постоянные магниты, а также постоянные магниты на верхней и нижней поверхностях диска.
| Анурьев В.А., "Справочник конструктора машиностроителя", т.2, М.: Машиностроение, 1982, стр.28-60 | |||
| Подшипниковый узел скольжения | 1990 |
|
SU1739104A1 |
| Магнитоэлектрическая опора | 1980 |
|
SU1051341A1 |
| US 3929390 A, 30.12.1975 | |||
| US 3243238 A1, 29.03.1966. | |||

