Изобретение относится к области измерений механической силы и связанных с ней величин: момента силы, давления, массы, деформаций, линейных и угловых ускорений. Известен резонатор силочувствительный (см. патент РФ №2329511, опубликованный в БИ №20 от 20.07.2008).
Известный резонатор силочувствительный с изгибной формой колебаний выполнен в виде двух идентичных параллельно расположенных между собой стержней, одни концы которых жестко соединены между собой и с первым элементом приложения измеряемой силы, а другие концы соединены через первые упругие шарниры со вторым элементом приложения измеряемой силы, при этом вторые упругие шарниры в средней части каждого стержня выполнены с образованием участков с большей изгибной жесткостью по сравнению с упругими шарнирами. Вышеуказанное устройство является наиболее близким по технической сущности к заявляемому устройству и поэтому выбрано в качестве прототипа.
Недостатком прототипа является невозможность достижения максимального значения чувствительности (заложенных в принципе работы силочувствительного резонатора) при необходимой ударопрочности (в условиях действия неизмеряемых сил со значениями, превышающими диапазон измерения).
Решаемой технической задачей является создание резонатора силочувствительного при сохранении габаритных размеров с более высокой чувствительностью с обеспечением ударопрочности.
Достигаемым техническим результатом является уменьшение критической силы стержней резонатора за счет уменьшения жесткости упругих шарниров, соединяющих концы стержней с участком приложения измеряемой силы.
Для достижения технического результата в резонаторе силочувствительном с изгибной формой колебаний, выполненном в виде двух идентичных параллельно расположенных между собой стержней, одни концы которых жестко соединены между собой и с первым элементом приложения измеряемой силы, а другие концы соединены через первые упругие шарниры со вторым элементом приложения измеряемой силы, при этом вторые упругие шарниры выполнены в средней части каждого стержня с образованием участков с большей изгибной жесткостью, новым является то, что участки повышенной изгибной жесткости выполнены клиновидными, узкие части которых обращены в сторону первых и вторых упругих шарниров соответственно.
Конструкция предлагаемого резонатора силочувствительного представлена на фигуре (пунктирными линиями обозначена форма прототипа).
Резонатор силочувствительный состоит из двух идентичных параллельно расположенных стержней с участками 1 и 2, разделенными упругими шарнирами 3. Концы стержней монолитно объединены с каждой из сторон двумя элементами 4 и 5, к которым прилагается измеряемая сила. В средней части каждого стержня в месте перехода от участка 1 к участку 2 образованы упругие шарниры 3 посредством местного уменьшения ширины стержней. С одной стороны концы стержней жестко соединены между собой элементом 4 (аналогично условию защемления), а с другой стороны концы стержней участка 2 объединены элементом 5 через упругие шарниры 6. Измеряемая сила P прикладывается к элементам 4 и 5 через концентраторы 7. Изгибные противофазные колебания резонатора силочувствительного (типа двухветвевого камертона) возбуждаются электромеханическим преобразователем (например, пьезоэлектрическим, на фигуре не показан) в плоскости, содержащей обе ветви камертона.
Новая совокупность существенных признаков увеличивает силовую чувствительность (коэффициент преобразования) резонатора силочувствительного.
Импеданс электромеханического преобразователя резонатора по электрической стороне на частоте резонанса принимает экстремальное значение, относительно значения за пределами резонансной частоты. Это используется для построения генераторов электрических сигналов с частотой, равной частоте механического резонанса резонатора. Процесс резонансных колебаний механического резонатора, и в частности двухветвевого камертона, сопровождается обменом потенциальной и кинетической энергией между двумя реактивными элементами системы с распределенными параметрами: эквивалентной упругостью и массой; часть энергии теряется на трение в материале стрежня и упругих шарнирах при их деформациях и в местах крепления концов стержней.
Устройство работает следующим образом. Механический резонатор через электромеханический преобразователь подключен в цепь обратной связи автогенератора. После подачи напряжения питания на автогенератор в системе "генератор - электрический преобразователь - резонатор" при соблюдении условий "баланса амплитуд" и "баланса фаз" (смотри, например, книгу П.В. Новицкий и др. "Цифровые приборы с частотными датчиками", "Энергия" 1970 г.) устанавливаются колебания резонатора и, соответственно, выходные электрические сигналы с частотой, равной резонансной частоте резонатора. Выходные электрические сигналы генератора используются после соответствующего преобразования для регистрации результатов измерения силы, действующей на резонатор. В исходном положении, соответствующем нулевому значению измеряемой силы, значение резонансной частоты механического резонатора f0 определяется конструктивными размерами элементов резонатора и физическими свойствами материала, из которого он изготовлен (модуль упругости - E, плотность - ρ). При значении измеряемой силы, приложенной к концентраторам 7 в продольном направлении резонатора (вдоль стержней) отличном от нуля, изменяется его эквивалентная упругость и, соответственно, значение резонансной частоты (растягивающая продольная сила вызывает увеличение частоты, а сжимающая - уменьшение). Функциональная зависимость частоты механического резонанса f(p) от значения продольной измеряемой силы P определяется следующим выражением:

где f0 - значение резонансной частоты резонатора при P=0;
B - постоянный коэффициент, равный величине обратной критической силы Ркр стержней резонатора (определяется формой, геометрическими размерами, условиями крепления концов, модулем упругости материала стержней).
При разложении в степенной ряд функция (1) для случая |B·P|<1 принимает вид:

Значение измеряемой силы, действующей на резонатор, преобразуется в выходной параметр в виде изменения резонансной частоты Δf(p) относительно начального значения f0 (девиация):

Относительная девиация δf(p) представляется выражением:

Для случаев, при которых максимальное значение произведения B·Pmax не превышает 0,1, вклад нелинейных членов выражения (4) (со степенью больше 1) не превышает 0,03 (3%). В связи с этим функции преобразования силочувствительного резонатора (3), (4) в первом приближении могут быть представлены линейными зависимостями:

в которых коэффициент преобразования определяется параметром - B (равен обратной величине критической силы - Pкр, при которой стержни резонатора теряют устойчивость).

Значения критической силы Pкр и ее обратной величины B определяются выражениями:


где l - длина участка 1 стержня;
µ - коэффициент приведения длины, заключенного между упругими шарнирами 3 и элементом 4 участка 1 стержня, определяется условиями крепления его концов;
E - модуль упругости материала стержня;
j - момент инерции сечения участка 1 стержня.
Коэффициент преобразования Кп измеряемой силы при изменении резонансной частоты резонатора силочувствительного стержневого типа с учетом выражений (5), (7) и распределения измеряемой силы поровну между двумя идентичными ветвями будет равен:

Коэффициент приведения длины µ для механической системы фигуры с идеальными шарнирами (момент сопротивления равен нулю) определяется решением уравнения (см. книгу Федосьева "Сопротивление материалов" "Наука" 1974 г. стр.441-447):

где 
a - длина участка 2 стержня, заключенного между упругими шарнирами 3, 6.
Максимальное значение чувствительности достигается при выполнении упругих шарниров 3 и 6 со значением реактивного момента (изгибной жесткостью), близким к нулю. Это требует выполнение упругих шарниров 3, 6 с малым сечением. При этом минимальная жесткость упругих шарниров 3, 6 и соответственно их сечение ограничивается прочностью в условиях действия предельных значений измеряемых и неизмеряемых (ударных) сил. Наличие конечного (отличного от нуля) упругого реактивного момента упругих шарниров 3, 6 увеличивает критическую силу стержневого резонатора, уменьшая тем самым его коэффициент преобразования.
Выполнение участков 1, 2 с переменной жесткостью позволяет минимизировать влияние реактивных моментов упругих шарниров 3, 6 на критическую силу стержней резонатора и увеличить его силовую чувствительность при сохранении уровня ударопрочности. При этом изгибная жесткость стержней резонатора максимальна у участков 1 в месте объединения концов элементом 4 и плавно уменьшается за счет уменьшения ширины по мере приближения к упругим шарнирам 3.
Изгибная жесткость участков 2 минимальна в местах присоединения к упругим шарнирам 3 и плавно уменьшается за счет монотонного уменьшения ширины по мере приближения к упругим шарнирам 6.
Оптимальные размеры силочувствительного резонатора определены моделированием на ПЭВМ с использованием метода конечных элементов. По результатам расчетов разработаны экспериментальные образцы. Проведенные исследования подтвердили эффективность предлагаемого технического решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЗОНАТОР СИЛОЧУВСТВИТЕЛЬНЫЙ | 2006 |
|
RU2329511C2 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2410705C2 |
| Микроэлектромеханический первичный преобразователь ускорения | 2017 |
|
RU2657351C1 |
| РЕЗОНАТОР ЭЛЕКТРОМЕХАНИЧЕСКИЙ | 2006 |
|
RU2302007C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2004 |
|
RU2281515C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2014 |
|
RU2579552C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2415441C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2003 |
|
RU2247993C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК МАТЕРИАЛОВ | 1996 |
|
RU2108561C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРИТИЧЕСКОЙ СИЛЫ ПРИ ПОТЕРЕ УСТОЙЧИВОСТИ СТЕРЖНЯ | 1997 |
|
RU2121665C1 |
Изобретение относится к области измерения механических параметров. Резонатор силочувствительный с изгибной формой колебаний выполнен в виде двух идентичных параллельно расположенных между собой стержней, одни концы которых жестко соединены между собой и с первым элементом приложения измеряемой силы, а другие концы соединены через первые упругие шарниры со вторым элементом приложения измеряемой силы, при этом вторые упругие шарниры выполнены в средней части каждого стержня с образованием клиновидных участков с большей изгибной жесткостью, узкие части которых обращены в сторону первых и вторых упругих шарниров соответственно. Достигаемым техническим результатом является увеличение силовой чувствительности резонатора силочувствительного. 1 ил.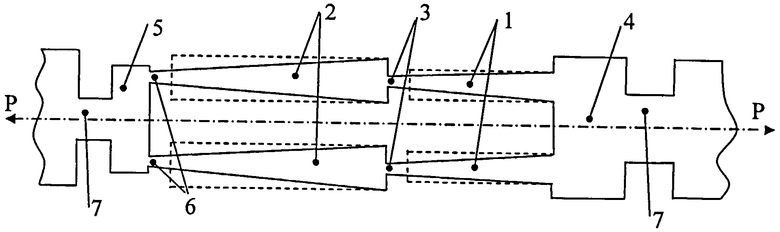
Резонатор силочувствительный с изгибной формой колебаний, выполненный в виде двух идентичных параллельно расположенных между собой стержней, одни концы которых жестко соединены между собой и с первым элементом приложения измеряемой силы, а другие концы соединены через первые упругие шарниры со вторым элементом приложения измеряемой силы, при этом вторые упругие шарниры выполнены в средней части каждого стержня с образованием участков с большей изгибной жесткостью, отличающийся тем, что участки с большей изгибной жесткостью выполнены клиновидными, узкие части которых обращены в сторону первых и вторых упругих шарниров соответственно.
| РЕЗОНАТОР СИЛОЧУВСТВИТЕЛЬНЫЙ | 2006 |
|
RU2329511C2 |
| Преобразователь силы | 1981 |
|
SU974151A1 |
| ДАТЧИК СИЛЫ С ЧАСТОТНЫМ ВЫХОДОМ | 1971 |
|
SU422985A1 |
| Силоизмерительный преобразователь с частотным выходом | 1977 |
|
SU659917A1 |
| Устройство для периодического цифрового измерения фаз сигналов искаженной формы | 1977 |
|
SU737864A1 |
| US 4384495 A1 24.05.1983 | |||

