Изобретение относится к погрузочно-разгрузочным средствам, а именно к устройствам для погрузки в трюмы судна непосредственно из пневмоколесных кузовных транспортных средств.
Известно устройство для погрузки сыпучих грузов в трюм судна (прототип), содержащее эстакаду с поребриками, размещенную над причалом вдоль причальной стенки, установленный на тележке загрузочный желоб с возможностью приема на него сыпучего груза с пневмоколесного транспортного средства с боковой разгрузкой и передачи сыпучего груза в трюмы судна, причем тележка установлена с возможностью перемещения под эстакадой на всю длину фронта погрузки, равную суммарной длине трюмов судна и возможности остановки тележки между колоннами эстакады, загрузочный желоб шарнирно закреплен своим концом, обращенным к эстакаде, на конце прямоугольной плоской рамы, которая шарнирно закреплена на тележке с возможностью поворота в вертикальной плоскости и кинематически связана с тележкой и днищем загрузочного желоба силовыми цилиндрами со штоками, причем загрузочный желоб в рабочем положении при загрузке судна размещен с зазорами между смежными колоннами эстакады со стороны причальной стенки, а в нерабочем - с зазорами между двумя рядами колонн эстакады и ее дорожным покрытием, тележка установлена с возможностью ее перемещения по рельсовой колее с помощью бесконечно замкнутого на приводном и натяжном блоках гибкого элемента, свободные концы которого закреплены на тележке, световые сигнальные приспособления для фиксации положения тележки в пределах фронта погрузки (Пат. РФ №2268225, В65G 67/60, 2006 г.).
Однако известное устройство характеризуется достаточно сложной схемой управления загрузочным желобом при перемещении тележки на новую позицию.
Техническим результатом изобретения является упрощение схемы управления тележкой с загрузочным желобом при перемещениях тележки вдоль фронта погрузки судна.
Технический результат достигается тем, что в устройстве для погрузки сыпучих грузов в трюмы судна, содержащем эстакаду с дорожным покрытием, поребриками и отбойным щитом, размещенную над причалом вдоль причальной стенки на колоннах, загрузочный желоб с возможностью приема на него сыпучего груза с пневмоколесного транспортного средства с боковой разгрузкой и передачи сыпучего груза в трюмы судна, причем загрузочный желоб установлен с возможностью перемещения на всю длину фронта погрузки, равную суммарной длине трюмов судна, шарнирно закреплен своим концом, обращенным к эстакаде, на конце прямоугольной плоской рамы, которая с ним кинематически связана силовыми цилиндрами со штоками, механизм перемещения загрузочного желоба в виде бесконечно замкнутого на приводном и натяжном блоках гибкого элемента, направляющие, световое приспособление для фиксации положения загрузочного желоба в пределах фронта погрузки, согласно изобретению прямоугольная плоская рама расположена вертикально со стороны колонн причальной стенки и снабжена в своей верхней части вертикально ориентированными катками с полукруглыми ободами с возможностью их взаимодействия с желобчатой направляющей, а в нижней части горизонтально ориентированными катками с возможности их взаимодействия с плоской направляющей, при этом обе направляющие закреплены на кронштейнах колонн эстакады, ориентированы горизонтально и размещены вдоль всего фронта погрузки, гибкий элемент закреплен на прямоугольной плоской раме, замкнут в горизонтальной плоскости с охватом с зазорами колонн эстакады со стороны причальной стенки и размещен с возможностью взаимодействия обеих его ветвей с горизонтальными полками, консольно закрепленными на упомянутых выше колоннах эстакады, а световое приспособление для фиксации положения загрузочного желоба в пределах фронта погрузки установлено непосредственно на прямоугольной плоской раме в ее верхней части, при этом положение зажимов для гибкого элемента на раме в вертикальной плоскости выбрано из соотношения
W1l1=W2l2,
где W1W2 - сопротивления движению по направляющим соответственно верхних и нижних катков, вызванные весовыми нагрузками от рамы и желоба, l1l2 - расстояния от зажимов соответственно до верхних и нижних катков.
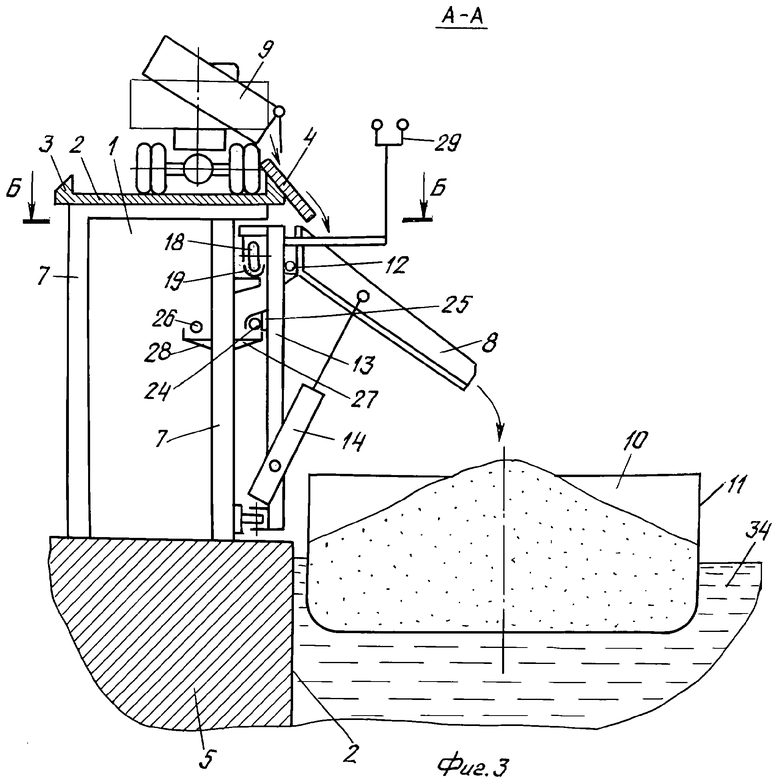
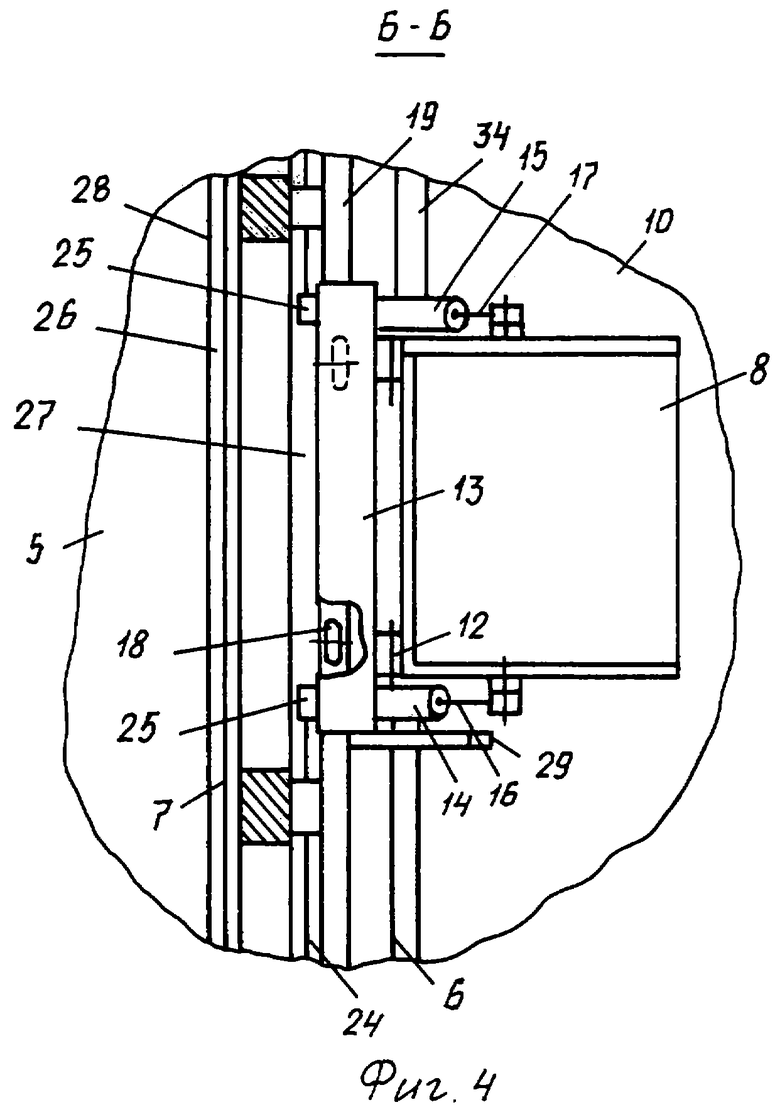
Устройство для погрузки сыпучих грузов в трюм судна представлено на фиг.1 - план, на фиг.2 - разрез А-А по фиг.1 при нерабочем положении загрузочного желоба, на фиг.3 - то же при погрузке судна, на фиг.4 - разрез Б-Б по фиг.3.
Устройство для погрузки сыпучих грузов в трюмы судна содержит эстакаду 1 с дорожным покрытием 2, поребриками 3 и отбойным щитом 4, размещенную над причалом 5 вдоль причальной стенки 6 на колоннах 7, загрузочный желоб 8 с возможностью приема на него сыпучего груза с пневмоколесного транспортного средства 9 с боковой разгрузкой и передачи сыпучего груза в трюмы 10 судна 11. Загрузочный желоб 8 установлен с возможностью перемещения на всю длину фронта погрузки, равную суммарной длине трюмов 10 судна 11. Загрузочный желоб 8 шарнирно (12) закреплен своим концом, обращенным к эстакаде 1, на конце прямоугольной плоской рамы 13, которая с ним кинематически связана силовыми цилиндрами 14 и 15 со штоками 16 и 17. Прямоугольная плоская рама 13 расположена вертикально со стороны колонн 7 причальной стенки 6 и снабжена в своей верхней части вертикально ориентированными катками 18 с полукруглыми ободами с возможностью взаимодействия катков 18 с желобчатой направляющей 19, а в нижней части - горизонтально ориентированными катками 20 с возможности их взаимодействия с плоской направляющей 21. При этом обе направляющие 19 и 21 закреплены на кронштейнах колонн 7, расположенных со стороны причальной стенки 6 эстакады 1, ориентированы горизонтально и размещены вдоль всего фронта погрузки. Механизм перемещения загрузочного желоба 8 выполнен в виде бесконечно замкнутого на приводном 22 и натяжном 23 блоках гибкого элемента (каната), одна ветвь 24 которого своими концами закреплена на прямоугольной плоской раме 13 с помощью зажимов 25. Гибкий элемент замкнут в горизонтальной плоскости с охватом его второй ветвью 26 с зазорами колонн 7 эстакады 1 со стороны причальной стенки 6 и размещен с возможностью взаимодействия обеих его ветвей 24 и 26 с горизонтальными полками 27 и 28, консольно закрепленными на упомянутых выше колоннах 7 эстакады 1. При этом положение зажимов 25 для ветви 24 гибкого элемента на раме 13 в вертикальной плоскости выбрано из соотношения
W1l1=W2l2,
где W1W2 - сопротивления движению по направляющим 19 и 21 соответственно верхних 18 и нижних 20 катков, вызванные весовыми нагрузками от рамы 13 и желоба 8, l1l2 - расстояния от зажимов соответственно до верхних 18 и нижних 20 катков.
Световое приспособление 29 для фиксации положения загрузочного желоба 8 в пределах фронта погрузки установлено непосредственно на прямоугольной плоской раме 13 в ее верхней части, 30 и 31 - наземные участки подъездной дороги, примыкающие к наклонным участкам 32 и 33 эстакады 1, 34 - акватория.
Устройство действует следующим образом. Исходное (нерабочее) положение загрузочного желоба 6 (фиг.2) - при втянутых штоках 16 и 17 силовых цилиндров 14 и 15. После швартовки транспортного судна 11 к причальной стенке 6 причала 5 прямоугольная плоская рама 13 с помощью приводного блока 22 и гибкого элемента 24, 26 перемещается своими катками 18 и 20 по направляющим 19 и 21 в пределах фронта погрузки до положения, соответствующего размещению загрузочного желоба 8 при погрузке транспортного судна 11. В этом положении прямоугольная плоская рама 13 останавливается. После этого включаются силовые цилиндры 14 и 15, которые поворачивают загрузочный желоб 8 вокруг шарнира 12 в рабочее положение (фиг.3) с заданным углом наклона загрузочного желоба 8 к горизонту. Пневмоколесное транспортное средство 9 с боковой разгрузкой по подъездной дороге 30 и наклонному участку 32 эстакады въезжают на эстакаду 1 с покрытием 2 и по сигналу светового приспособления 29, останавливается в нужном месте. При подъеме кузова пневмоколесного транспортного средства 9 сыпучий груз самотеком направляется сначала на отбойный щит 4, а с него на наклонный загрузочный желоб 8, с которого перегружается в трюм 10 судна 11 с образованием в трюме 10 штабеля, симметричного продольной оси судна 11. После заполнения соответствующего участка трюма 10 сыпучим грузом - за несколько циклов разгрузки пневмоколесных транспортных средств 9 - включается приводной блок 22 и с помощью гибкого элемента 24, 26 рама 13 с загрузочным желобом 8 перемещается по направляющим 19 и 21 в новое положение. Далее циклы разгрузки пневмоколесных транспортных средств 9 повторяются в описанном выше порядке. Загрузочный желоб 8 при его перемещении на новое место может переводиться в исходное положение, если необходимо обойти надстройки судна. В остальных случаях загрузочный желоб 8 все время погрузки судна 11 находится в наклонном положении, а силовые цилиндры 14 и 15 не задействуются. Освобожденные от сыпучего груза пневмоколесные транспортные средства 9 по наклонному участку 33 съезжают на дорогу 31 и отправляются за новой партией груза. Желобчатая форма направляющей 19 для верхних катков 18 исключает возможность бокового схода катков 18 с этой направляющей под действием крутящего момента, создаваемого весом загрузочного желоба 8 при перемещении рамы 13 и весом загрузочного желоба 8 вместе с весом находящегося на нем в процессе перегрузки в трюм 10 судна 11 сыпучего груза. Выбранное положение зажимов 25 для гибкого элемента 24 на раме 13 устраняет возможность перекоса ходовой части рамы 13 и обеспечивает минимально возможную энергоемкость при перемещениях рамы 13 вдоль фронта погрузки. Установка светового приспособления 29 непосредственно на раме 13 позволяет удешевить устройство за счет сокращения числа этих приспособлений до одного.
Отличительные признаки изобретения позволяют упростить конструкцию устройства и упростить управление процессом погрузки судна.

Изобретение относится к погрузочно-разгрузочным средствам. Устройство для погрузки сыпучих грузов в трюмы судна содержит эстакаду с колоннами (7), загрузочный желоб (8) для приема сыпучего груза с пневмоколесного транспортного средства с боковой разгрузкой, установленный с возможностью перемещения на длину фронта погрузки и шарнирно закрепленный на прямоугольной плоской раме (13), связанной с ним силовыми цилиндрами. Механизм перемещения загрузочного желоба образован бесконечным гибким элементом, замкнутым с охватом с зазорами колонн эстакады через приводной и натяжной блоки на прямоугольной плоской раме зажимами (25). Прямоугольная плоская рама снабжена в своей верхней части вертикально ориентированными катками (18), а в нижней части - горизонтально ориентированными катками (20), взаимодействующими соответственно с направляющими (19) и (21), закрепленными на колоннах эстакады. На прямоугольной плоской раме установлено световое приспособление для фиксации положения загрузочного желоба в пределах фронта погрузки. Положение зажимов гибкого элемента на раме в вертикальной плоскости выбрано из соотношения W1l1=W2l2, где W1, W2 - сопротивления движению по направляющим соответственно верхних и нижних катков, вызванные весовыми нагрузками от рамы и желоба, l1, l2 - расстояния от зажимов соответственно до верхних и нижних катков. Изобретение упрощает конструкцию устройства и управление. 4 ил.
Устройство для погрузки сыпучих грузов в трюмы судна, содержащее эстакаду с дорожным покрытием, поребриками и отбойным щитом, размещенную над причалом вдоль причальной стенки на колоннах, загрузочный желоб с возможностью приема на него сыпучего груза с пневмоколесного транспортного средства с боковой разгрузкой и передачи сыпучего груза в трюмы судна, причем загрузочный желоб установлен с возможностью перемещения на всю длину фронта погрузки, равную суммарной длине трюмов судна, шарнирно закреплен своим концом, обращенным к эстакаде, на конце прямоугольной плоской рамы, которая с ним кинематически связана силовыми цилиндрами со штоками, механизм перемещения загрузочного желоба в виде бесконечно замкнутого на приводном и натяжном блоках гибкого элемента, направляющие, световое приспособление для фиксации положения загрузочного желоба в пределах фронта погрузки, отличающееся тем, что прямоугольная плоская рама расположена вертикально со стороны колонн причальной стенки и снабжена в своей верхней части вертикально ориентированными катками с полукруглыми ободами с возможностью их взаимодействия с желобчатой направляющей, а в нижней части горизонтально ориентированными катками с возможностью их взаимодействия с плоской направляющей, при этом обе направляющие закреплены на кронштейнах колонн эстакады, ориентированы горизонтально и размещены вдоль всего фронта погрузки, гибкий элемент закреплен на прямоугольной плоской раме, замкнут в горизонтальной плоскости с охватом с зазорами колонн эстакады со стороны причальной стенки и размещен с возможностью взаимодействия обеих его ветвей с горизонтальными полками, консольно закрепленными на упомянутых выше колоннах эстакады, а световое приспособление для фиксации положения загрузочного желоба в пределах фронта погрузки установлено непосредственно на прямоугольной плоской раме в ее верхней части, при этом положение зажимов для гибкого элемента на раме в вертикальной плоскости выбрано из соотношения
W1l1=W2l2,
где W1, W2 - сопротивления движению по направляющим соответственно верхних и нижних катков, вызванные весовыми нагрузками от рамы и желоба,
l1, l2 - расстояния от зажимов соответственно до верхних и нижних катков.
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ СЫПУЧИХ ГРУЗОВ В ТРЮМ СУДНА | 2004 |
|
RU2268225C1 |
| JP 10324426 А1, 08.12.1998 | |||
| JP 2004175568 А1, 24.06.2004 | |||
| DE 19641455 С1, 26.03.1998 | |||
| Эстакадно-бункерный перегрузочный пункт при комбинированном транспорте в карьере | 1985 |
|
SU1418232A1 |

