Изобретение относися к системам карьерного транспорта, а именно к комплексам для подъема и спуска автомобилей-самосвалов в карьер при ведении открытых горных работ.
Известен грузоведущий вертикально замкнутый конвейер, содержащий пластинчато-катковую тяговою цепь с возможностью огибания ею приводной и натяжной звездочек и перемещения ходовых катков цепи по направляющим, состоящим из наклонного участка и примыкающих к нему горизонтальных участков в нижней и верхней частях конвейера, при этом на цепи с определенным шагом закреплены кулаки с возможностью их взаимодействия с транспортируемыми в процессе сборки автомобилями, перемещаемыми на собственных колесах по специальным путям, размещенным с наружных сторон от направляющих для ходовых катков (Спиваковский А.О., Дьячков В.К. Транспортирующие машины, М., Машиностроение, 1968, с.309-312, рис.312,б).
Недостатком известного грузоведущего конвейера является невозможность транспортирования груженых автомобилей-самосвалов на борт карьера из-за саморазгрузки горной массы из кузова автомобиля-самосвала при значительном угле наклона трассы транспортирования и повышение металлоемкости и энергоемкости при одновременном спуске автомобилей-самосвалов в карьер.
Известен комплекс для подъема автомобилей-самосвалов на борот карьера (прототип), содержащий кинематически связанные между собой линии подъема груженых и спуска порожних автомобилей-самосвалов, каждая в виде двух вертикально замкнутых пластинчато-катковых тяговых цепей с возможностью огибания ими приводных и натяжных звездочек и с перемещением ходовых катков по направляющим, состоящим из наклонного участка и примыкающих к нему горизонтальных участков в нижней и верхней частях комплекса, на цепях с определенным шагом закреплены приспособления для захвата и транспортирования автомобилей-самосвалов, выполненные в виде шарнирно прикрепленных к цепям и размещенных между ними сдвоенных рычагов с катками на свободных концах с возможностью поворота сдвоенных рычагов в вертикальной плоскости и перемещения катков по направляющим, размещенным под направляющими для ходовых катков тяговых цепей, при этом сдвоенные рычаги соединены между собой площадками с возможностью размещения на них задних колес автомобилей-самосвалов на линии их подъема, площадки размещены с зазорами над путями и выполнены с криволинейными упорами со стороны натяжной звездочки с возможностью их взаимодействия с задними колесами автомобилей-самосвалов, а путь на наклонном участке линии подъема размещен с возможностью перемещения по нему передних колес автомобилей-самосвалов (пат. РФ №2284958, В65В 15/00, Е21С 47/00, 2006).
Известен также карьерный подъемник для автомобилей-самосвалов, выполненный по аналогичной схеме и снабженный устройствами клинового типа для улавливания оборвавшихся цепей тягового органа (пат. РФ №2287477, В65В 15/00, Е21С 47/00, 2006).
Однако при большой глубине карьера и использовании в карьере автомобилей-самосвалов большой грузоподъемности возникает необходимость в дублировании системы улавливания для повышения уровня безопасности при эксплуатации комплекса, т.к. подъем автомобилей-самосвалов осуществляется вместе с находящимися в кабинах водителями.
Техническим результатом изобретения является повышение уровня безопасности при эксплуатации комплекса для подъема автомобилей-самосвалов.
Технический результат достигается тем, что в комплексе для подъема автомобилей-самосвалов на борот карьера, содержащем кинематически связанные между собой линии подъема груженых и спуска порожних автомобилей-самосвалов, каждая в виде двух вертикально замкнутых пластинчато-катковых тяговых цепей с возможностью огибания ими приводных и натяжных звездочек и с перемещением ходовых катков по направляющим, состоящим из наклонного участка и примыкающих к нему горизонтальных участков в нижней и верхней частях комплекса, на цепях с определенным шагом закреплены приспособления для захвата и транспортирования автомобилей-самосвалов, выполненные в виде шарнирно прикрепленных к цепям и размещенных между ними сдвоенных рычагов с катками на свободных концах с возможностью поворота сдвоенных рычагов в вертикальной плоскости и перемещения катков по направляющим, размещенным под направляющими для ходовых катков тяговых цепей, при этом сдвоенные рычаги соединены между собой площадками с возможностью размещения на них задних колес автомобилей-самосвалов на линии их подъема, площадки размещены с зазорами над путями и выполнены с криволинейными упорами со стороны натяжной звездочки с возможностью их взаимодействия с задними колесами автомобилей-самосвалов, а путь на наклонном участке линии подъема размещен с возможностью перемещения по нему передних колес автомобилей-самосвалов, устройства для улавливания оборвавшихся тяговых цепей, согласно изобретению комплекс снабжен дополнительной системой улавливания, выполненной в виде башмаков, шарнирно установленных с шагом, кратным расстоянию между поднимаемыми автомобилями-самосвалами, на направляющих для катков сдвоенных рычагов и с возможностью поворота в вертикальной плоскости, башмаки размещены в прорезях верхних полок направляющих с возможностью упора в их нижние полки с наклоном в сторону движения катков и возможностью взаимодействия с ними с подъемом свободных концов башмаков катками при нормальной работе комплекса и упором катков в башмаки при обрыве тяговых цепей, при этом башмаки выполнены сужающимися в сторону своих свободных концов и криволинейной формы с прогибом в сторону нижних полок направляющих.
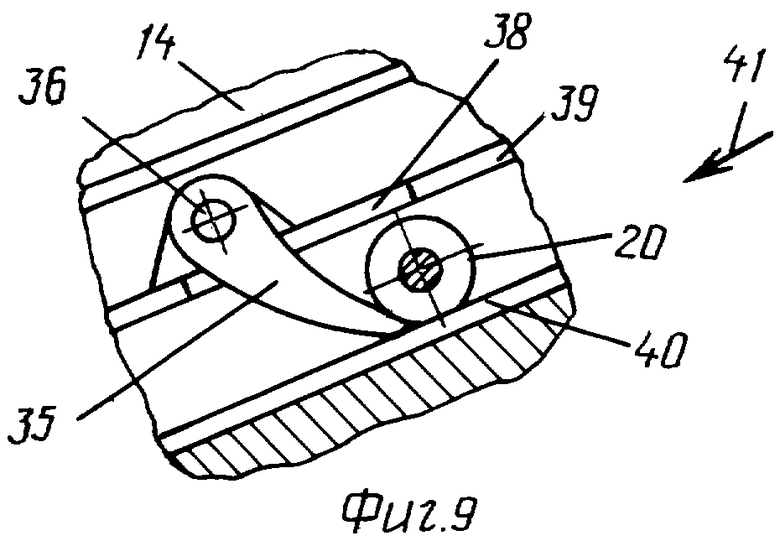
Комплекс для подъема автомобилей-самосвалов на борт карьера представлен на фиг.1 - вид сбоку на линию подъема, на фиг.2 - план комплекса, на фиг.3 - размещение груженого автомобиля-самосвала на наклонном участке линии подъема, на фиг.4 - узел опирания задних колес автомобиля-самосвала на прикрепленную к тяговым цепям площадку, на фиг.5 - вид А по фиг.4, на фиг.6 - разрез Б-Б по фиг.5 - узел установки дополнительного улавливающего устройства в момент прохода катка, на фиг.7 - то же, в интервале между катками, на фиг.8 - разрез В-В по фиг.6, на фиг.9 - положение элементов устройства в момент улавливания площадки с автомобилем-самосвалом после обрыва тяговых цепей.
Комплекс для подъема автомобилей-самосвалов на борот карьера содержит линию 1 для подъема груженых автомобилей-самосвалов 2 на борт 3 карьера 4 и размещенную параллельно ей линию 5 для спуска порожних автомобилей-самосвалов 6 в карьер 4. Линия 1 для подъема и линия 5 для спуска состоят из двух вертикально замкнутых пластинчато-катковых тяговых цепей 7 и 8 с возможностью огибания ими приводных звездочек 9 и 10 и натяжных звездочек 11 и 12 с перемещением ходовых катков 13 и тяговых цепей 7 и 8 по направляющим 14. Каждая линия 1, 5 состоит из наклонных участков 15 и примыкающих к ним горизонтальных участков 16 в нижней части комплекса и горизонтальных участков 17 в верхней части комплекса. На тяговых цепях 7 и 8 каждой линии 1 и 5 с определенным шагом закреплены приспособления для захвата и транспортирования автомобилей-самосвалов 2 и 6. Эти приспособления выполнены в виде шарнирно (18) прикрепленных к двум пластинчато-катковым цепям 7 и 8 и размещенных между ними сдвоенных рычагов 19 с катками 20 на свободных концах. Сдвоенные рычаги 19 установлены с возможностью их поворота в вертикальной плоскости и перемещения катков 20 по направляющим 21, размещенным под направляющими 14 для ходовых катков 13. Сдвоенные рычаги 19 соединены между собой площадками 22 с возможностью размещения на них задних колес 23 груженого автомобиля-самосвала 2 на линии 1 их подъема. Площадки 22 размещены с зазорами 24 над путями 25. Каждая площадка 22 на линии 1 подъема выполнена с криволинейным упором 26 со стороны натяжной звездочки 11 с возможностью его взаимодействия с задними колесами 27 автомобиля-самосвала 2. При этом путь 25 на наклонном участке 15 размещен с возможностью перемещения по нему передних колес 28 груженых автомобилей-самосвалов 2 на линии 1 подъема при горизонтальном расположении автомобилей-самосвалов 2. Приводные звездочки 9 и 10 снабжены общим приводом 29. Линии 1 и 5 снабжены промежуточными приводными звездочками 30 и 31, которые также кинематически связаны между собой с помощью общего привода 32. На линии 5 спуска может быть установлено меньшее число промежуточных звездочек, чем на линии 1 подъема. 33 и 34 - направления движения груженых 2 и порожних 6 автомобилей-самосвалов при их подъеме на борт 3 карьера 4 и спуске в карьер 4.
Комплекс снабжен устройствами клинового типа (не показаны) для улавливания оборвавшихся тяговых цепей 7 на линии подъема 1, а также дополнительными дублирующими улавливающими устройствами. Дополнительная система улавливания выполнена в виде башмаков 35. Каждый башмак 35 шарнирно установлен с помощью оси 36 с возможностью ее поворота в вертикальной плоскости относительно втулки 37, которая закреплена на направляющих 21 для катков 20 сдвоенных рычагов 19 с шагом, кратным расстоянию между поднимаемыми автомобилями-самосвалами 2. Башмаки 35 размещены в прорезях 38 верхних полок 39 направляющих 21 с возможностью упора башмаков 35 в их нижние полки 40 с наклоном в сторону 33 движения катков 20. При этом башмаки 35 размещены с возможностью взаимодействия с ними с подъемом свободных концов башмаков 35 катками 20 при нормальной работе комплекса и упором катков 20 в башмаки 35 при обрыве тяговых цепей и движении катков 20 в направлении 41. Причем башмаки 35 выполнены сужающимися в сторону своих свободных концов и криволинейной формы с прогибом в сторону нижних полок 40 направляющих 21.
Комплекс действует следующим образом. При включении приводов 29 и 32 крутящий момент от них передается верхним приводным 9, 10 и промежуточным приводным 30, 31 звездочкам линии подъема 1 и линии спуска 5. Благодаря этому верхние ветви тяговых цепей 7 начинают непрерывно двигаться в направлении 33 (вверх), и верхние ветви тяговых цепей 8 - двигаться в направлении 34 (вниз). Каждый груженый автомобиль-самосвал 2, находящийся в карьере 4, заезжает на горизонтальный участок 16 пути 25 и останавливается. При непрерывном движении тяговых цепей 7 очередная площадка 22 набегает на задние колеса 27 автомобиля-самосвала 2 и своим упором 26 приводит автомобиль-самосвал 2 в движение. При этом его передние колеса 28 сначала двигаются по горизонтальному участку 16 пути 25, затем переходят на его криволинейный и наклонный 15 участки. За счет соответствующего профиля пути 25 груженый автомобиль-самосвал 2 всегда остается в горизонтальном положении на всей линии подъема 1. На площадку 22 и ее упор 26 передается нагрузка только от задних колес 27, а нагрузка от передних колес 28 передается непосредственно на путь 25. После подъема на верхний горизонтальный участок 17 груженый автомобиль-самосвал 2 своим ходом выезжает на борт 3 карьера 4, а площадка 22, разворачиваясь, вместе с тяговой цепью 7 огибает приводную звездочку 9, переходя на нижнюю ветвь, и движется вниз. Одновременно на борт 3 карьера 4 поднимаются несколько груженых автомобилей-самосвалов 2 с интервалом, определяемым принятым расстоянием между смежными площадками 22. Аналогичным образом обеспечивается спуск порожних автомобилей-самосвалов 6 по линии 5.
При нормальной работе комплекса на линии подъема 1 движущиеся в направляющих 21 в направлении 33 катки 20, набегая на башмаки 35, поворачивают их на оси 36 против часовой стрелки и свободно проходят под ними. При этом башмаки в этот момент размещаются в прорезях 38 верхних полок 39 направляющих 35. После прохода катков 20 башмаки под действием собственного веса размещаются с упором их свободных концов в нижние полки 40 направляющих 21. В случае обрыва тяговых цепей 7 одновременно срабатывают две системы улавливания груженых автомобилей-самосвалов 2 - улавливающее устройство клинового типа (не показано) и предлагаемая дополнительная система улавливания. После обрыва тяговых цепей 7 площадки 22 вместе с размещенными на них автомобилями самосвалами 2 под действием синусоидальной составляющей веса автомобилей самосвалов 2 и самих тяговых цепей 7 начинают двигаться в обратном направлении 41. Но как только катки 20 войдут в соприкосновение с башмаками 35, произойдет их остановка и удержание от дальнейшего скатывания вниз автомобиля-самосвала 2. При этом тормозное усилие воспринимается башмаком 35 с передачей им нагрузок как на нижнюю полку 40 направляющей 21, так и на втулку 37 через ось 36. Наличие прорезей 38 в зонах размещения башмаков 35 позволяет уменьшить высоту и металлоемкость направляющих 21 для катков 20.
Отличительные признаки изобретения обеспечивают повышение уровня безопасности при эксплуатации комплекса для подъема автомобилей-самосвалов.







Изобретение относится к системам карьерного транспорта, а именно к комплексам для подъема и спуска автомобилей-самосвалов в карьер. Комплекс содержит линии подъема груженых и спуска порожних автомобилей-самосвалов, которые выполнены в виде двух вертикально замкнутых пластинчато-катковых тяговых цепей, имеющих ходвые катки, перемещающиеся по направляющим. На цепях с определенным шагом закреплены приспособления для захвата и транспортирования автомобилей-самосвалов, выполненные в виде шарнирно прикрепленных к цепям и размещенных между ними сдвоенных рычагов с катками на свободных концах с возможностью поворота сдвоенных рычагов в вертикальной плоскости и перемещения катков по направляющим. Сдвоенные рычаги на линии подъема соединены между собой площадками, выполненными с криволинейными упорами, для размещения на них задних колес автомобилей-самосвалов. Комплекс снабжен устройствами для улавливания оборвавшихся цепей и дополнительно системой улавливания. Система улавливания содержит башмаки, размещенные с шагом, кратным расстоянию между поднимаемыми автомобилями-самосвалами, на направляющих для катков сдвоенных рычагов в прорезях верхних полок этих направляющих с возможностью поворота в вертикальной плоскости и упора их в нижние полки этих направляющих. Башмаки установлены с наклоном в сторону движения катков и возможностью взаимодействия с ними с подъемом свободных концов башмаков упомянутыми катками при нормальной работе комплекса и упором катков в башмаки при обрыве тяговых цепей. Башмаки выполнены сужающимися в сторону своих свободных концов и криволинейной формы с прогибом в сторону нижних полок направляющих. Изобретение обеспечивает повышение безопасности при эксплуатации комплекса для подъема автомобилей-самосвалов. 9 ил.
Комплекс для подъема автомобилей-самосвалов на борт карьера, содержащий кинематически связанные между собой линии подъема груженых и спуска порожних автомобилей-самосвалов, каждая в виде двух вертикально замкнутых пластинчато-катковых тяговых цепей с возможностью огибания ими приводных и натяжных звездочек и с перемещением ходовых катков по направляющим, состоящим из наклонного участка и примыкающих к нему горизонтальных участков в нижней и верхней частях комплекса, на цепях с определенным шагом закреплены приспособления для захвата и транспортирования автомобилей-самосвалов, выполненные в виде шарнирно прикрепленных к цепям и размещенных между ними сдвоенных рычагов с катками на свободных концах с возможностью поворота сдвоенных рычагов в вертикальной плоскости и перемещения катков по направляющим, размещенным под направляющими для ходовых катков тяговых цепей, при этом сдвоенные рычаги соединены между собой площадками с возможностью размещения на них задних колес автомобилей-самосвалов на линии их подъема, площадки размещены с зазорами над путями и выполнены с криволинейными упорами со стороны натяжной звездочки с возможностью их взаимодействия с задними колесами автомобилей-самосвалов, а путь на наклонном участке линии подъема размещен с возможностью перемещения по нему передних колес автомобилей-самосвалов, и устройства для улавливания оборвавшихся тяговых цепей, отличающийся тем, что комплекс снабжен дополнительно системой улавливания, выполненной в виде башмаков, шарнирно установленных с шагом, кратным расстоянию между поднимаемыми автомобилями-самосвалами на направляющих для катков сдвоенных рычагов и с возможностью поворота в вертикальной плоскости, башмаки размещены в прорезях верхних полок направляющих с возможностью упора в их нижние полки с наклоном в сторону движения катков и возможностью взаимодействия с ними с подъемом свободных концов башмаков катками при нормальной работе комплекса и упором катков в башмаки при обрыве тяговых цепей, при этом башмаки выполнены сужающимися в сторону своих свободных концов и криволинейной формы с прогибом в сторону нижних полок направляющих.
| КОМПЛЕКС ДЛЯ ПОДЪЕМА АВТОМОБИЛЕЙ-САМОСВАЛОВ НА БОРТ КАРЬЕРА | 2005 |
|
RU2284958C1 |
| Устройство для подъема и спуска автосамосвалов из карьеров | 1987 |
|
SU1437337A1 |
| US 6460657 А, 08.10.2002 | |||
| Ловитель кареток подвесного конвейера | 1981 |
|
SU1034966A1 |

