Предлагаемое изобретение относится к электрическим измерительным устройствам, предназначенным для измерения колебаний в широком диапазоне частот колебаний в различных средах.
Известно значительное количество вибрационных (ударных) датчиков, основанных на использовании пьезоэлектрических преобразователей («Электрические измерения физических величин: (Измерительные преобразователи)». Энергоатомиздат, Ленинградское отделение. 1983 г.), например принятый за прототип датчик ударов - патент РФ №2055368, G01P 15/09. Данный датчик содержит пьезокерамический трубчатый стержень с электродами, закрепленный в корпусе одним концом на основании с электроконтактами перпендикулярно его поверхности, на другом конце стержня закреплен инерционный элемент, между которым и корпусом размещено демпфирующее кольцо.
Общими существенными признаками прототипа, совпадающими с существенными признаками предлагаемого технического решения, являются следующие - вибрационный датчик содержит пьезокерамический трубчатый стержень с электродами, закрепленный в корпусе одним концом на основании с электроконтактами перпендикулярно его поверхности, на другом конце стержня закреплен инерционный элемент, при этом внутри корпуса размещен демпфирующий элемент.
Датчикам данной конструкции присуща противоречивость требований к полосе частот и чувствительности. Так для повышения чувствительности требуется увеличивать массу при заданной жесткости упругой балки. Однако это снижает диапазон измеряемых частот, так как собственная частота упругих колебаний балки с массой при этом падает
 где
где
m - масса инерционного груза;
с - жесткость упругой балки.
Предлагаемым изобретением решается техническая задача разрешения данного противоречия - расширение диапазона измерения при повышении чувствительности датчика.
Для достижения указанного технического результата в вибрационном датчике, содержащем пьезокерамический трубчатый стержень с электродами, закрепленный в корпусе одним концом на основании с электроконтактами перпендикулярно его поверхности, а на другом конце стержня закреплен инерционный элемент и внутри корпуса размещен демпфирующий элемент, инерционный элемент выполнен в виде массы-структуры, которая состоит из тонкостенного цилиндра, полость которого заполнена текучей демпфирующей средой (например, маслом низкой вязкости) и единичными сферическими грузами, с возможностью их свободного перемещения, а в качестве 2 демпфирующего элемента, размещенного внутри корпуса, использована также текучая демпфирующая среда, при этом сферические грузы имеют различную массу.
Отличительными признаками предлагаемого вибрационного датчика от известного является то, что инерционный элемент выполнен в виде массы-структуры, которая состоит из тонкостенного цилиндра, полость которого заполнена текучей демпфирующей средой и единичными сферическими грузами, с возможностью их свободного перемещения, а в качестве демпфирующего элемента, размещенного внутри корпуса, использована также текучая демпфирующая среда, при этом сферические грузы имеют различную массу.
Благодаря наличию данных отличительных признаков в совокупности с известными, указанными в ограничительной части формулы, достигается следующий технический результат - расширяется диапазон измерения при повышении чувствительности датчика.
Предложенное техническое решение может найти применение в электрических измерительных устройствах, предназначенных для высокоточного и оперативного измерения вибраций в различных отраслях техники.
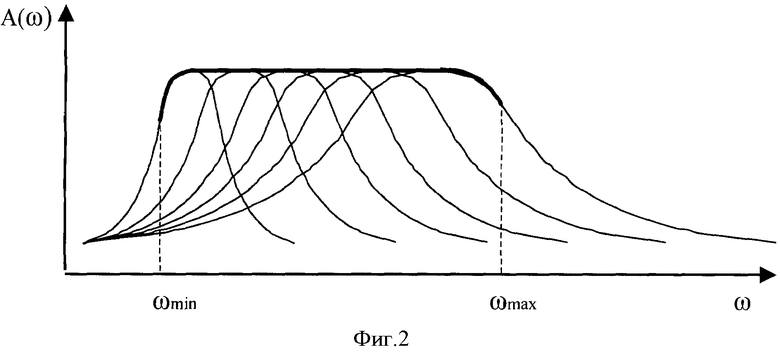
Конструкция предлагаемого вибрационного датчика поясняется чертежами, на которых изображен датчик (фиг.1) и его амплитудно-частотная характеристика (фиг.2).
Изображенный на чертеже вибрационный датчик содержит пьезокерамический трубчатый стержень 1 с электродами 2 (проводящий слой на внутренней поверхности трубчатого стержня 1) и 3 (проводящий слой на внешней поверхности трубчатого стержня 1 с разрывом вдоль его продольной оси), закрепленный в корпусе 4 одним концом на основании 5 с электроконтактами 6 и 7 перпендикулярно поверхности основания 5. На другом конце стержня 1 закреплен инерционный элемент 8, а внутри корпуса 4 размещен демпфирующий элемент 9. Инерционный элемент 8 выполнен в виде массы-структуры, которая состоит из тонкостенного цилиндра 10, полость которого заполнена текучей демпфирующей средой 11 (например маслом низкой вязкости) и единичными сферическими грузами 12, с возможностью их свободного перемещения (т.е. около трети объема не заполнено грузами 12), торцы цилиндра 10 загерметизированы. В качестве демпфирующего элемента 9, размещенного внутри корпуса 4, использована также текучая демпфирующая среда, при этом сферические грузы 12 имеют различную массу. При этом массы грузов и шаг выбора масс могут быть разными в зависимости от назначения, чувствительности, технических требований и т.п.
Так, например, масса грузов может быть выбрана из условия mi=mi-1+Δm·i, где mi - масса i-го груза, mi-1 - масса i-1-го груза, Δm - постоянный шаг массы, i - порядковый номер груза, m0=Δm. При этом предельная масса грузов mпред=ωпред 2·с, где ωпред - предельная частота измеряемых колебаний, задаваемая техническими требованиями. Количество грузов определяется по следующей зависимости i=mпред/Δm.
Представленный вибрационный датчик работает следующим образом.
Датчик закрепляется на поверхности, вибрация которой измеряется. При этом работа датчика основана на том, что при возникновении на поверхности контролируемого объекта вибраций (или ударов) под воздействием инерционного элемента 8 происходит изгиб трубчатого стержня 1. При этом между внутренней и внешней поверхностями стержня 1 (электродами 2 и 3) возникает пьезо э.д.с., которая усиливается зарядовым усилителем (на рисунке не показан). В инерционном элементе 8 при этом происходит следующий процесс. При низких частотах колебаний все единичные грузы 12 воспринимают колебания волн, возникающих внутри массы-структуры - цилиндра 10. При этом грузы 12 наибольшей массы имеют большую амплитуду волны, но затем по мере повышения частот они затухают, но зато увеличиваются волны, генератором которых являются грузы 12 с меньшей массой. И так далее. Таким образом в упруго-массовой системе реализуется n резонансных систем, отличающихся собственными частотами упругих колебаний за счет возникновения биений волн в масляной среде. При этом единичные грузы 12 выполняют роль «ядер» этих волн, имеющих различную массу, а следовательно, и различную частоту резонанса. Причем, если при низких возбуждающих частотах единичные грузы 12 большей массы входят в резонанс, и тем самым повышают чувствительность датчика, то на больших частотах они перестают колебаться и начинают играть роль демпфера. Однако при больших частотах возникают волны вокруг единичных грузов меньшей массы, которые также втягиваются в резонанс с возбуждающими колебаниями. Такая система относится к классу самосинхронизирующихся систем. Как видно из представленного на фиг.1 графика, представляющего зависимость относительной амплитуды колебаний балки А(ω) от частоты измеряемых воздействий ω - амплитудно-частотную характеристику (АЧХ). АЧХ такой системы складывается из АЧХ единичных микросистем-волн. При этом за счет резонанса повышается чувствительность. За счет разбиения массы инерционного элемента 8 на множество масс единичных грузов выравнивается АЧХ структуры.
Применение предложенной массы-структуры позволяет расширить рабочий диапазон частот датчика от 0,5 Гц до 20 кГц. Такой датчик работает и в дозвуковом и звуковом диапазонах. Причем при некоторой частоте он переходит в режим измерения поверхностных акустических волн. За счет локальных резонансов достигается чувствительность до 105 дБ при широко применяемой керамике типа ЦТС 19.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКИЙ ШИРОКОПОЛОСНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2015 |
|
RU2583131C1 |
| Датчик низкоамплитудных апериодических вибраций на основе пленочного чувствительного элемента | 2022 |
|
RU2781805C1 |
| Комбинированный гидроакустический приёмник | 2024 |
|
RU2825562C1 |
| ПОГРУЖНОЙ ДАТЧИК ВИБРАЦИОННОГО ИЗМЕРИТЕЛЯ ПЛОТНОСТИ ЖИДКОСТИ | 1996 |
|
RU2105966C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ РАСХОДОМЕРА | 2011 |
|
RU2471155C1 |
| Датчик измерителя интенсивности акустического поля | 1979 |
|
SU772609A1 |
| Микроэлектромеханический вибрационный датчик давления | 2024 |
|
RU2828647C1 |
| Устройство для измерения угла отклонения от вертикали | 1979 |
|
SU964443A2 |
| СКВАЖИННЫЙ АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1990 |
|
RU2012020C1 |
| УСТРОЙСТВО ГАШЕНИЯ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ ЭЛЕМЕНТОВ АНТЕННЫХ СИСТЕМ, ВЫПОЛНЕННЫХ В ФОРМЕ КОНСОЛЬНОЙ БАЛКИ | 2018 |
|
RU2725826C2 |
Изобретение относится к электрическим измерительным устройствам, предназначенным для измерения колебаний в широком диапазоне частот колебаний в различных средах. Вибрационный датчик содержит пьезокерамический трубчатый стержень с электродами, закрепленный в корпусе одним концом на основании с электроконтактами перпендикулярно его поверхности, а на другом конце стержня закреплен инерционный элемент, выполненный в виде массы-структуры, которая состоит из тонкостенного цилиндра, полость которого заполнена текучей демпфирующей средой (например маслом низкой вязкости) и единичными сферическими грузами, с возможностью их свободного перемещения, при этом сферические грузы имеют различную массу. Внутри корпуса размещен демпфирующий элемент, в качестве которого использована также текучая демпфирующая среда. Техническим результатом является расширение диапазона измерения при повышении чувствительности датчика. 2 ил.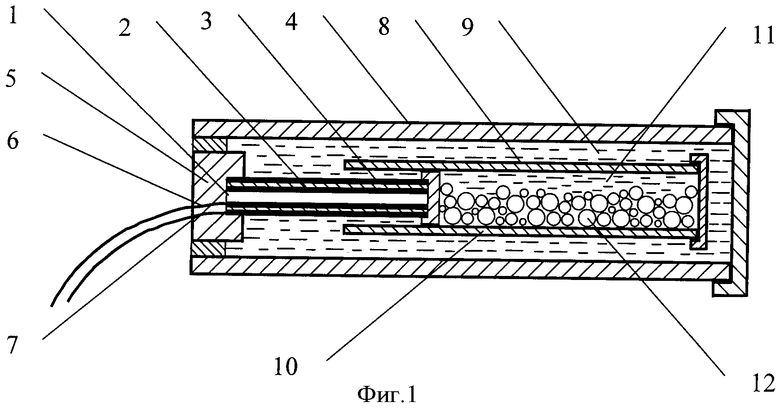
Вибрационный датчик, содержащий пьезокерамический трубчатый стержень с электродами, закрепленный в корпусе одним концом на основании с электроконтактами перпендикулярно его поверхности, на другом конце стержня закреплен инерционный элемент, внутри корпуса размещен демпфирующий элемент, отличающийся тем, что инерционный элемент выполнен в виде массы-структуры, которая состоит из тонкостенного цилиндра, полость которого заполнена текучей демпфирующей средой и единичными сферическими грузами, с возможностью их свободного перемещения, в качестве демпфирующего элемента, размещенного внутри корпуса, использована также текучая демпфирующая среда, при этом сферические грузы имеют различную массу.
| RU 2055368 С1, 27.02.1996 | |||
| Устройство для передачи и приема информации | 1984 |
|
SU1221674A1 |
| US 6752005 В2, 22.06.2004 | |||
| JP 2005308482 А, 04.11.2005. | |||

