ОБЛАСТЬ ТЕХНИКИ
Данная заявка является частичным продолжением заявки на патент США №09/812416 "Способ и устройство для распределения и хранения поддонов в автоматизированной структуре парковки", поданной 20 марта 2001 г., которая, в свою очередь, является частичным продолжением заявки на патент США №09/364934 "Способ и устройство для распределения и хранения поддонов в автоматизированной структуре парковки", поданной 30 июля 1999 г.; обе эти заявки включены путем ссылки в заявку на патент США №10/133557 "Автоматизированный гараж", поданную 27 апреля 2002 г., и связаны с ней.
Настоящее изобретение относится к системам автоматизированной парковки и хранения, а более конкретно - к интерфейсу программного обеспечения для контроля, управления, функционирования и отображения информации для таких систем.
УРОВЕНЬ ТЕХНИКИ
Автоматизированные механические гаражные системы используются с конца 1950-х годов. В первых автоматизированных парковочных гаражах для перемещения и хранения транспортных средств в пределах парковочной структуры использовали системы с кранами, транспортерами, гидравлическими и пневматическими устройствами. Недавно были разработаны более усовершенствованные системы, которые включают управляемое компьютером специализированное оборудование для перемещения транспортных средств к назначенным парковочным местам посредством способа, во многом аналогичного используемому в компьютеризированных сборочных линиях или складах для хранения и выдачи разнообразных товаров.
Примеры автоматизированных гаражных систем описаны в следующих документах: патент США №5467561; патент США №5556246; патент США №5573364 и патент США №5669753.
С начала 1980-х годов во многих машинных системах для представления информации и получения входных данных от пользователя или оператора используется графический интерфейс пользователя (GUI). Во многих случаях такой графический интерфейс пользователя представляет собой немногим более чем альтернативное представление традиционного интерфейса. Например, определенные операционные системы используют графический интерфейс пользователя для сбора и отображения по существу той же самой информации, что и традиционные, ориентированные на текст, операционные системы (графический интерфейс пользователя определяется как любой компьютерный интерактивный интерфейс, который заменяет символы графическими изображениями, которыми управляют с помощью координатно-указательного устройства, например "мыши" или трекбола, и которые отображают с использованием процессора).
Хотя как автоматизированный способ парковки, так и технология графического интерфейса пользователя были известны в течение последних двадцати лет, не известно никаких графических интерфейсов пользователя для приложений, которые управляют работой системы автоматизированной парковки и хранения. Кроме того, не существует никаких пользовательских интерфейсов, графических или иных, которые отображают состояние компонентов в системе автоматизированной парковки и хранения интуитивно понятным и однозначным способом, который подходит для неопытного оператора.
Соответственно, существует потребность в архитектуре, которая была бы лишена недостатков, присущих существующим техническим решениям. Более конкретно, имеется потребность в архитектуре, которая осуществляет отображение информации и управление информацией на автоматизированном предприятии парковки и хранения интуитивно понятным и однозначным способом, который позволяет даже неопытному оператору понять состояние компонентов автоматизированной системы парковки. Кроме того, имеется потребность в системе, которая дает графическое отображение сигналов опасности в отношении состояния компонентов системы автоматизированной парковки и хранения и позволяет оператору предпринять корректирующее воздействие с использованием того же самого визуального интерфейса, который отобразил сигнал опасности.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение, описанное ниже, в одном своем аспекте представляет архитектуру системы управления для управления предприятием автоматизированной парковки и хранения с использованием интерактивного интерфейса, например графического интерфейса пользователя. Интерактивный интерфейс используется для графического представления различных компонентов предприятия автоматизированной парковки и хранения. Кроме того, этот способ включает показ множества графических объектов относительно виртуального этажа или уровня предприятия. Таким образом, настоящее изобретение позволяет отобразить полное состояние предприятия автоматизированной парковки и хранения.
Графические объекты, показанные относительно этажа, приблизительно отображают фактическую физическую структуру этажа и могут включать пункт входа/выхода (EES), модуль для перемещения транспортного средства вдоль оси X, модуль для перемещения транспортного средства вдоль оси Y, модуль для перемещения транспортного средства вдоль оси Z и опоры ("полки") для хранения транспортных средств. В некоторых случаях для точного отображения планировки этажа можно отобразить повторяющиеся элементы. Например, для отображения этажа с тремя пунктами входа/выхода можно отобразить три объекта, представляющие пункты входа/выхода.
Кроме того, настоящее изобретение включает процесс отображения множества объектов управления. Каждый объект управления связан с каким-либо аспектом управления системой автоматизированной парковки и хранения. Например, объект управления может быть графической кнопкой, используемой для запуска или остановки физического процесса. Конечно, объект, отображенный относительно этажа, также может действовать как объект управления. Например, объект вертикального подъемного транспортера может быть выбран оператором для контроля или управления работой физического подъемного транспортера.
Множество графических объектов включает по меньшей мере отображение пункта входа/выхода, предназначенного для ввода транспортного средства или предмета на предприятие автоматизированной парковки и хранения и вывода из него, транспортный модуль для перемещения транспортного средства или предмета в пределах предприятия автоматизированной парковки и хранения и множество опор для хранения транспортных средств или предметов. Кроме того, графический интерфейс пользователя отображает информацию о размерах и изображение предмета или транспортного средства, а также подробную диагностическую информацию для различных компонентов системы предприятия.
Кроме того, эта архитектура включает возможность доступа оператора к системе управления из локального узла, из удаленного узла или из обоих таких узлов, причем эти узлы оперативно связаны с системой управления. При этом оператор может управлять работой предприятия посредством контроля и управления различными компонентами предприятия, а также может извлекать хранимую информацию.
Кроме того, для пользователя в удаленном интерактивном узле архитектура включает возможность получения доступа к выбранной информации в системе управления через веб-сайт. Сайт предоставляет пользователю одну или несколько веб-страниц для получения информации о парковке и хранении. Информация включает (но не ограничивается этим) информацию о заполнении, чтобы пользователь мог установить, имеет ли предприятие свободную опору для хранения, и предусматривает для пользователя возможность онлайновой транзакции с целью резервирования или бронирования одной или нескольких опор для хранения с целью последующего использования.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеописанные и другие цели, особенности и преимущества настоящего изобретения станут понятнее из последующего описания предпочтительного варианта его выполнения со ссылками на сопровождающие чертежи, на которых одинаковые объекты обозначены одинаковыми позициями. Чертежи выполнены не в масштабе, а призваны только иллюстрировать основные принципы настоящего изобретения:
на фиг.1 показан вид сверху входного этажа на автоматизированном предприятии парковки и хранения согласно настоящему изобретению;
на фиг.2А-2С показано изображение основного окна управления на экране компьютерного дисплея, когда компьютер управляет работой автоматизированного предприятия парковки и хранения, изображенного на фиг.1;
на фиг.3 показано изображение глобальной панели управления основного окна управления, изображенного на фиг.2, на экране компьютерного дисплея;
на фиг.4А-4F показана область отображения первого этажа в основном окне управления, показанном на фиг.2, на экране компьютерного дисплея;
на фиг.5 показано изображение на экране компьютерного дисплея, изображающее седьмой этаж в основном окне управления, показанном на фиг.2;
на фиг.6 показано изображение на экране компьютерного дисплея, изображающее панель Store Car (Помещение автомобиля на хранение) в основном окне управления, показанном на фиг.2;
на фиг.7 показано изображение на экране компьютерного дисплея, изображающее панель Retrieve Car (Извлечение автомобиля) основного окна управления, показанного на фиг.2;
на фиг.8 показано изображение на экране компьютерного дисплея, изображающее основное диагностическое окно, когда компьютер управляет работой автоматизированного предприятия парковки и хранения, показанного на фиг.1;
на фиг.9А и фиг.9В показано изображение на экране компьютерного дисплея, изображающее окно Upper Carrier Module Diagnostic (Диагностика верхнего несущего модуля), когда компьютер управляет работой автоматизированного предприятия парковки и хранения, показанного на фиг.1;
на фиг.10 показана последовательность операций, выполняемых для графического отображения компонентов автоматизированного предприятия парковки и хранения согласно настоящему изобретению;
на фиг.11 показан экран доступа к базе данных, из которого оператор может получить доступ к хранящимся данным;
на фиг.12 показан экран Retrieve Cycle Times (Время цикла извлечения), к которому можно получить доступ через ссылку Retrieve Cycle Times на экране доступа к базе данных;
на фиг.13 показан экран Store Cycle Times (Время цикла помещения на хранение), к которому можно получить доступ через ссылку Store Cycle Times на экране доступа к базе данных;
на фиг.14 показан экран размеров и изображений, используемый для представления соответствующих данных, полученных, когда транспортное средство въезжало в пункт входа/выхода гаража;
на фиг.15 показана блок-схема системы, посредством которой предприятие парковки и хранения можно контролировать и можно им управлять; и
на фиг.16 показан пример веб-страницы предприятия парковки и хранения, представляемой клиенту удаленного узла.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
На фиг.1 показан общий план этажа или план этажа входного уровня для автоматизированного предприятия 100 парковки и хранения, которое включает архитектуру для управления этим предприятием с использованием интерактивного интерфейса, например графического интерфейса, согласно изобретению. Следует отметить, что автоматизированное предприятие 100 парковки и хранения предназначено для приема не только транспортных средств, но и других предметов, например контейнеров, катеров или любых предметов, которые отвечают заданным критериям размера для их хранения на предприятии 100. Таким образом, когда речь идет об автоматизированном гараже 100 для парковки, подразумевается автоматизированное предприятие 100 парковки и хранения, а когда речь идет о парковке транспортного средства, подразумевается, что сюда входит и хранение предметов. Как показано на чертеже, один компонент, этаж входного уровня автоматизированного гаража 100, включает четыре пункта 130 входа/выхода. Каждый пункт 130 входа/выхода предназначен для впуска и выпуска транспортных средств, хранимых в автоматизированном гараже 100. Рядом с пунктом 130 входа/выхода расположено несколько пунктов 140 складирования поддонов. Конечно, может использоваться больше или меньше пунктов 130 входа/выхода, в зависимости от фактической и проектной пропускной способности гаража 100. В пункте 140 складирования поддонов хранятся пустые поддоны, которые используются для перемещения транспортных средств или предметов в процессе операций по их постановке на хранение и извлечения. Поддон извлекают из пункта 140 складирования поддонов и перемещают в пункт 130 входа/выхода для приема поступающего транспортного средства. Поддон извлекают из пункта 130 входа/выхода и укладывают в пункт 140 складирования поддонов при выходе транспортного средства. Поддоны переносят между пунктом 130 входа/выхода и пунктом 140 складирования поддонов с использованием челночного устройства для перемещения поддонов (не показано) согласно способу, описанному в заявке США №09/364934.
Автоматизированный гараж 100 содержит множество отсеков 114 для хранения транспортных средств. Как показано на чертеже, каждый отсек 114 этажа или уровня может содержать до двух транспортных средств. Первое транспортное средство может храниться на внутренней опоре 116, а второе транспортное средство может храниться на внешней опоре 118 отсека 114 для хранения. В дополнение к отсекам 114, доступным для транспортных средств и показанным на фиг.1, отсеки 114 для хранения транспортных средств могут иметься и на верхних и/или нижних этажах (не показаны) автоматизированного гаража 100. В дополнение к этому, имеются один или несколько вертикальных подъемных транспортеров (VLC) 120, предназначенных для перемещения транспортных средств и соответствующих поддонов между этажами автоматизированного гаража 100.
При операциях постановки на хранение и извлечения транспортное средство транспортируется на опорном поддоне между внутренней опорой 116 или внешней опорой 118 отсека 114 для хранения и пунктом 130 входа/выхода с использованием нижнего несущего модуля (LCM) 110 для хранения на этаже входного уровня или с использованием верхнего несущего модуля (UCM) для хранения на уровне, отличном от этажа входного уровня. Несущий модуль 110 осуществляет такую транспортировку через проход 112. Несущий модуль 110 содержит модуль установки на опору (REM) (не показан), предназначенный для перемещения поддона с транспортным средством (то есть загруженного поддона) между несущим модулем 110 и внутренней опорой 116 для хранения или внешней опорой 118 для хранения, пунктом 130 входа/выхода или вертикальным подъемным транспортером 120.
Работой компонентов автоматизированного гаража 100, включая, например, вертикальный подъемный транспортер 120, несущий модуль 110, модуль установки на опору (не показан), внешнюю дверь 131 и внутреннюю дверь 133 в пункте 130 входа/выхода, управляет система управления. Система управления имеет программное обеспечение, используемое для управления автоматизированным предприятием 100 парковки и хранения, то есть интерфейс пользователя и управляющее программное обеспечение, предназначенное для получения доступа к информации, контроля, управления компонентами предприятия и обеспечения функций веб-сайта. Центральная компьютерная система (называемая также центральным компьютером) выполняет команды программного обеспечения системы управления и, предпочтительно, размещена в диспетчерской 126. Центральный компьютер содержит монитор и устройство для ввода данных и используется оператором для контроля и управления работой автоматизированного гаража 100. Помимо прочего, автоматизированный гараж 100 содержит вестибюль 124, в котором клиенты могут ожидать извлечения своих транспортных средств и производить оплату услуг автоматизированной парковки.
Когда транспортное средство въезжает в автоматизированный гараж 100, оно попадает в пункт 130 входа/выхода через открытую внешнюю дверь 131 и перемещается на поддон. Перед тем как транспортное средство въезжает в пункт 130 входа/выхода, внутреннюю дверь 133 закрывают, чтобы воспрепятствовать проникновению водителя и пассажиров транспортного средства во внутренние области автоматизированного гаража 100. Затем водитель и пассажиры транспортного средства выходят из транспортного средства и из пункта 130 входа/выхода и активизируют автоматизированную систему парковки, вызывая таким образом закрытие внешней двери 131. Несущий модуль 110 перемещается по проходу 112 к позиции, соответствующей пункту 130 входа/выхода, через который транспортное средство попало в гараж 100. Модуль установки на опору несущего модуля 110 выдвигается из несущего модуля 110 в пункт 130 входа/выхода, поднимает поддон и транспортное средство или предмет (то есть загруженный поддон) в поддерживаемое положение и втягивает загруженный поддон из пункта 130 входа/выхода назад в несущий модуль 110. Центральный компьютер определяет пустую опору (внутреннюю или внешнюю) для хранения транспортного средства и опорного поддона. Центральный компьютер заставляет несущий модуль 110 пройти по проходу 112 и переместиться к позиции, соответствующей заданной пустой опоре.
Если заданная опора расположена на другом этаже гаража 100, компьютер перемещает несущий модуль 110 в вертикальный подъемный транспортер 120 и заставляет модуль установки на опору переместить поддон и транспортное средство в вертикальный подъемный транспортер 120. Модуль установки на опору способен по команде осуществить поворот на сто восемьдесят градусов, так что транспортное средство возвращается в пункт 130 входа/выхода в такой ориентации, что клиент может прямо выехать из пункта 130 входа/выхода вместо того, чтобы выезжать задним ходом. Вертикальный подъемный транспортер 120 перемещает поддон и транспортное средство на соответствующий этаж автоматизированного гаража 100, где загруженный поддон перемещается в верхний несущий модуль. Когда верхний несущий модуль, на котором перемещаются поддон и транспортное средство, находится в положении, соответствующем заданной опоре, модуль установки на опору выдвигается на эту опору (внутреннюю или внешнюю ее часть) и перемещает поддон и транспортное средство или предмет на заданную опору для хранения. Специалисту в данной области техники понятно, что аналогичные шаги можно выполнить для снятия загруженного поддона с опоры.
Как сказано выше, работу гаража 100 контролирует и ею управляет центральный компьютер, выполняющий программное обеспечение системы управления, посредством интерактивного интерфейса. На фиг.2-7 показаны различные окна и графические изображения, выдаваемые программой управления работой гаража, позволяющей оператору контролировать работу автоматизированной системы парковки и управлять ею.
На фиг.2А-2С показан экран компьютера, на котором открыто окно 200 Main Control (Главное окно управления), которое выдается центральным компьютером при управлении работой автоматизированного гаража 100. Окно 200 Main Control содержит часть 300 глобальной панели управления (GCP), которая включает объекты, используемые для контроля и управления всей работой автоматизированного гаража 100, часть 600 Store Car (Помещение автомобиля на хранение) для управления хранением транспортных средств в пределах автоматизированного гаража 100 и часть 700 Retrieve Car (Извлечение автомобиля) для управления извлечением транспортных средств из автоматизированного гаража 100. Область 400 отображения входного уровня на фиг.2А дает графическое представление физических компонентов и состояния первого этажа, через который транспортные средства вводят и выводят из гаража 100. Аналогично демонстрируется содержимое и состояние других этажей. Части окна 200 Main Control на фиг.2В и фиг.2С дополнительно включают графические представления каждого из этажей (FLOOR 2-7) автоматизированного гаража 100. Одним из примеров такого представления является область 500 отображения седьмого этажа (FLOOR 7) на фиг.2С.
На фиг.3 показана часть 300 глобальной панели управления окна 200 Main Control. Системой управления можно управлять как в автоматическом, так и в полуавтоматическом режиме или путем комбинации этих режимов. Нормальным режимом работы является автоматический режим, при котором гараж 100 работает полностью под управлением компьютерной системы управления. Таким образом, для помещения на хранение или для извлечения транспортного средства не требуются никакие действия со стороны оператора. В автоматическом режиме имеется возможность эксплуатировать часть оборудования в полуавтоматическом режиме, когда оператор руководит работой оборудования. Обычно полуавтоматический режим используется при испытаниях или когда автоматический режим не поддерживает какую-либо конкретную функцию, например по техническому обслуживанию или работе в ручном режиме.
Часть 300 глобальной панели управления содержит объекты, которые информируют о состоянии автоматизированного гаража 100 и позволяют оператору управлять работой гаража 100 в целом. На левой стороне части 300 глобальной панели управления показаны средства управления, обозначенные 310 "Halt All" ("Остановить все") и "E-STOP" 312 ("Экстренная остановка"), - оба используются для остановки работы компонентов автоматизированного гаража 100. Кнопка 310 "Halt All" позволяет оператору приказать управляющей программе в системе управления управляющего компьютера прекратить посылку каких-либо команд компонентам автоматизированного гаража 100. Хотя никакие новые команды посланы не будут, все текущие команды будут полностью обработаны. Кнопка 310 "Halt All" особенно полезна для выключения систем 100 гаража, например, для осмотра оборудования и для технического обслуживания. Кнопка "E-STOP" 312 позволяет оператору послать сигнал "жесткой остановки системы" в управляющую программу, которая немедленно остановит перемещение всех компонентов гаража 100.
На правой стороне части 300 глобальной панели управления имеется три колонки кнопок, которые позволяют оператору управлять работой гаража 100 и/или контролировать ее. Оператор может выбрать кнопку 320 "Off" ("Выключение"), чтобы вывести системы гаража 100 из автоматического или полуавтоматического режима, фактически выводя все компоненты гаража 100 из-под программного управления. Кнопка 322 "Manual" (Ручной) позволяет оператору вручную управлять всеми компонентами гаража с помощью средств управления программным обеспечением в полуавтоматическом режиме. Кнопка 324 "Automatic" (Автоматический) позволяет оператору подать сигнал в систему управления для начала полного автоматического управления, таким образом задавая управление всеми компонентами гаража согласно заранее заданным параметрам. Кнопка 326 "Diagnostics" (Диагностика) позволяет оператору отобразить экран с диагностической информации, относящейся к различным компонентам гаража 100.
Выбор оператором кнопки 328 "Alarm" ("Тревога") приводит к открытию аварийного окна управления. Аварийное окно управления позволяет оператору выяснять состояние и управлять состоянием всех аварийных ситуаций, связанных с гаражом. Когда подан сигнал опасности, кнопка 328 "Alarm" выделяется и выдается звуковое предупреждение. Следует отметить, что система управления может быть сформирована так, чтобы в дополнение к интерактивному интерфейсу передать сигнал опасности или тревоги удаленному оператору через пейджерное устройство или другое личное беспроводное устройство оператора. Кроме того, сигнал опасности или тревоги может быть передан в одно или несколько заданных факсимильных устройств, по адресу электронной почты или в другие узлы связи. Выбор кнопки 330 "Slot Status" ("Состояние отсека") вызывает появление окна, позволяющего оператору наблюдать состояние любого требуемого отсека в пределах гаража 100. Кнопка 332 "Reports" "Отчеты" открывает окно отчетов, которое позволяет оператору выделить и напечатать отчеты о работе гаража 100. Выбор кнопки 334 "Cycle Testing" "Периодическая проверка" вызывает появление окна, в котором показаны модули проверки, что позволяет оператору проверить функционирование определенных аппаратных средств, используемых при работе гаража 100. Выбор оператором кнопки 336 "Garage Status" "Состояние гаража" вызывает появление окна, которое показывает текущий список транспортных средств и очередь команд постановки на хранение и изъятия автомашин. Выбор кнопки 338 "SIM" "Моделирование" позволяет оператору запустить программу моделирования работы программного обеспечения с использованием подключенных аппаратных средств. Кнопка 340 "Manual Test" ("Ручной тест") позволяет пользователю выполнить тест в ручном режиме. Выбор кнопки 342 "Prog Monitor" "Контроль программы" позволяет оператору контролировать выполнение программы. Кнопоки "SIM", "Manual Test" и "Prog Monitor" используются, прежде всего, для установки параметров и для тестирования системы управления, и эти кнопки могут быть инактивированы в процессе обычных автоматических и полуавтоматических операций.
На фиг.4А более подробно показана область 400 отображения первого этажа в окне 200 "Main Control", изображенном на фиг.2А-2С. Видно, что область 400 отображения первого этажа включает не только графические объекты, представляющие фактические физические компоненты гаража 100, но также состояние определенных компонентов и общее содержание гаража 100. Все внутренние опоры 116 и внешние опоры 118 отсеков 114 для хранения на фиг.1 представлены в области 400 отображения, причем каждой внутренней опоре 116 и внешней опоре 118 присвоены уникальные идентификационные номера.
Отметим, однако, что количество объектов и их графическое отображение могут быть отрегулированы с учетом большего разрешения дисплея, чтобы можно было видеть больше отсеков для хранения и большее количество контролируемых и управляемых объектов с целью их контроля и управления ими. Например, дисплей с диагональю 15 дюймов (38 см) может обеспечить только ограниченную возможность для рассмотрения окна (например, 800×600 пикселей), поскольку оператору может быть трудно рассматривать представленное на нем графическое изображение и работать с ним. Альтернативно, на экране с большим разрешением (например, 1600×1200 пикселей) дисплея с диагональю 21 дюйм (53 см) имеется больше оконного пространства для отображения графических объектов и показа контрольных и управляющих графических символов. Таким образом можно разместить больший план гаража и показать более подробную его конфигурацию.
Например, графический объект, соответствующий внутренней опоре 416, обозначен идентификационным номером "1012", а внешней опоре 418 присвоен идентификационный номер "1011". Идентификационные номера могут быть назначены любым способом, но в настоящем примере идентификационный номер каждого отсека 114 для хранения основан на этаже, позиции вдоль прохода и ряде каждого отсека 114. Внутренняя опора 416 находится на первом этаже (что отражено первой цифрой "1"), в первой позиции прохода (отражено следующими двумя цифрами "01"), и во втором ряду (отражено четвертой цифрой "2").
Содержимое каждого отсека 114 также представлено в области 400 отображения. Например, внешняя опора 418 пуста. Внешняя опора 417 содержит штабель поддонов (обозначенный блоком 411), а внешняя опора 419 имеет пиктограмму 409 загруженного поддона, которая представляет собой графическое изображение автомобиля внутри прямоугольника. Каждое транспортное средство, с которым работает гаражная система, получает уникальный идентификационный номер 413 транспортного средства, который показан под пиктограммой 409 загруженного поддона.
При ручном управлении оператор может выбрать занятую опору, например внешнюю опору 419, чтобы запустить управляющую программу по извлечению автомобиля. В этом случае предпочтительно, чтобы выбранная опора 419 выделялась подсвечиванием, указывая, что хранящееся транспортное средство встало в очередь на извлечение. Аналогично, выбор оператором пустой опоры интерпретируется как команда постановки автомобиля на выбранную опору. Когда требуется постановка транспортного средства на хранение, графическое изображение опоры выделяется, указывая, что соответствующая опора зарезервирована для хранения транспортного средства.
Как и физический план гаража 100, область 400 включает изображение прохода 412, вдоль которого перемещается несущий модуль 410 (то есть нижний несущий модуль 110, если речь идет об этаже входного уровня, и верхний несущий модуль для остальных этажей). Область 400 отображения показывает также физическое состояние и содержимое несущих модулей 110 посредством каждого соответствующего объекта 410 несущего модуля. Графический интерфейс пользователя показывает анимированное перемещение в реальном времени всех механических компонентов, установленных в предприятии 100 по парковке.
Когда несущий модуль 110 находится в движении, для ограничения и указания диапазона его перемещения используются ограничительные маркеры 440. В ручном режиме оператор может "перетащить" ограничительные маркеры 440 влево или вправо по графическому изображению 412 прохода с использованием позиционирующего устройства (например "мыши", светового пера и т.д.), оперативно связанного с управляющим компьютером, чтобы ограничить фактический рабочий диапазон перемещения несущих модулей 110 по проходу 112. Содержимое несущего модуля 110 и состояние соответствующего модуля установки на опору изображено с помощью индикатора 415 модуля установки на опору.
Соответствующие объекты 420 вертикального подъемного транспортера могут изображать вертикальный подъемный транспортер 120 на различных этажах, так что вертикальный подъемный транспортер 120 изображен графически на каждом этаже, представленном на дисплее. На фиг.1 пункт 130 входа/выхода изображен как группа объектов 430 пункта входа/выхода, включая несколько объектов состояния, которые идентифицируют состояние соответствующего пункта 130 входа/выхода. Для представления различных рабочих режимов можно использовать разные цвета отображения. Например, когда гараж 100 работает в автоматическом режиме, цвет фона является желтым, а когда гараж 100 работает в ручном режиме, цвет фона является красным.
Открытое/закрытое состояние внешней двери 131 гаража в пункте 130 входа/выхода на фиг.1 представлено графически индикатором 433 внешней двери пункта входа/выхода в области 400 отображения первого этажа. Индикатор 433 двери пункта входа/выхода представляет собой текст, указывающий состояние Opened (Открыто), Closed (Закрыто) или промежуточное положение между открытым и закрытым. Перемещением автомашин в каждом пункте 130 входа/выхода также управляют с использованием соответствующего дисплея 434 состояния, связанного с соответствующим объектом 430 пункта входа/выхода. Каждый пункт 130 входа/выхода может быть запрограммирован для приема и выдачи транспортных средств, и, таким образом, индикатор состояния 434 пункта входа/выхода представляет собой текст "enter" (вход) или "exit" (выход), соответственно, для соответствующего перемещения объекта. Кроме того, каждый пункт 130 входа/выхода может быть индивидуально запрограммирован для работы в автоматическом или ручном режимах, а объект 435 состояния соответствующего рабочего режима обеспечивает управление в "автоматическом" или "ручном" режиме соответственно.
Кроме того, каждый пункт 130 входа/выхода оборудован системой представления сообщений, которая выдает команды и предупреждения водителю посредством визуальных и звуковых команд. Система выдачи сообщений включает одно или несколько табло для показа сообщения клиенту, когда тот находится в пункте 130 входа/выхода. Сообщения представляются в ответ на сигналы, выдаваемые в управляющий компьютер многочисленными датчиками, расположенными в различных местах в гараже 100. Следует отметить, что система выдачи сообщений может включать возможность использования устройства для подачи звуков совместно с цветными лампами или индикаторами, а также множество других обычных средств передачи сообщений и указательных средств для инструктирования клиента.
Каждый пункт 130 входа/выхода включает оборудование для предварительного определения размеров транспортного средства или объекта, проверяющее, чтобы каждое транспортное средство, которое первоначально поступает в пункт 130 входа/выхода, удовлетворяло заданным ограничениям. Необходимо иметь уверенность, что транспортное средство фактически может вписаться в элементы гаража и систему для постановки на хранение и извлечения. Таким образом, перед помещением транспортного средства в гараж 100 это оборудование измеряет длину, ширину и высоту каждого транспортного средства, поступающего в гараж 100, и определяет, удовлетворяет ли это транспортное средство заданным критериям. Для транспортных средств или предметов, которые не выходят за заданные пределы и подходят для хранения в гараже 100, клиент через систему выдачи сообщений получает дальнейшие инструкции по подготовке автомобиля к хранению. Альтернативно, если размеры транспортного средства превышают заданные критерии, клиенту не разрешают парковать транспортное средство в гараже 100. Соответственно, система выдачи сообщений используется для уведомления клиента о том, что транспортное средство не удовлетворяет необходимым критериям и его нельзя оставить в гараже 100, а необходимо удалить.
Кроме того, пункт 130 входа/выхода включает систему позиционирования и наведения, которая помогает водителю транспортного средства разместить транспортное средство на пустом поддоне пункта 130 входа/выхода. Сигналы и сообщения, связанные с системой позиционирования и наведения, выдаются оператору через графический интерфейс пользователя, а водителю через систему выдачи сообщений на табло. Примеры таких сообщений, выдаваемых водителю и отображаемых оператору, включают (но не ограничиваются): "Pull Forward" (Перемещайтесь вперед), "Proceed Slowly Until Red Light" (Перемещайтесь медленно, пока не загорится красный свет), "Set Brake, Exit Car, Swipe" (Поставьте на тормоз, выйдите из автомобиля, захлопните дверь), "Doors Closing - Stand Clear" (Двери закрываются, стойте), "Move Left" (Сместитесь влево), "Move Right" (Сместитесь вправо), "Car Over Height" (Автомобиль превышает допустимую высоту), "Car Over Width" (Автомобиль превышает допустимую ширину), "Car Over Length" (Автомобиль превышает допустимую длину), "Too Far Forward -Pull Back" (Слишком далеко вперед, подайте назад), "Not in Position - Please Re-Park" (He попали на место, повторите въезд) и т.д.
Оборудование для предварительной обработки данных о транспортном средстве включает также систему формирования изображения, которая создает изображение транспортного средства или предмета с различных углов после того, как было определено, что размеры транспортного средства удовлетворяют требованиям для его постановки в гараж 100. Изображения соответствуют состоянию транспортного средства в момент времени, когда это транспортное средство попадает в гаражную систему и является доказательством того, что имеющиеся царапины или повреждения транспортного средства не могут быть поставлены в вину владельцу гаража.
Кроме того, определенные области гаража 100 снабжены детекторами движения и детекторами живых объектов, что позволяет обнаруживать перемещение людей и оборудования и избежать травматизма. Каждый пункт 130 входа/выхода физического гаража 100 предпочтительно включает также три стандартных индикатора графика. Объекты, соответствующие каждому из этих индикаторов, также включены в изображение соответствующих объектов 430 пункта входа/выхода в области 400. Индикаторы 436, 437 и 438 трафика представляют собой красные, желтые и зеленые индикаторы соответственно и относятся к остановке, скорой остановке и перемещению вперед.
Гараж 100 включает оборудование для накопления поддонов и осуществляет накопление поддонов с использованием соответствующего оборудования, как описано в заявке на патент США № 09/364934. Соответственно, операция по накоплению поддонов также отображается графически в области 400. Область 400 включает объект 450 складирования поддонов, объект 460 накопления поддонов и объект 455 челночного перемещения поддонов. Объект 455 челночного перемещения поддонов представляет устройство для челночного перемещения поддонов (не показано) и перемещается между штабелем 450 поддонов, вспомогательным накопителем 460 поддонов и любым из пунктов 430 входа/выхода, управляя подачей поддонов согласно способу складирования и доставки поддонов, используемому в гараже 100. Ограничительные маркеры 452 челночного перемещения поддонов указывают диапазон перемещения объекта 455 челночного перемещения поддонов для текущей команды. Ограничительные маркеры 452 челночного устройства могут перемещаться при ручном управлении оператором, который задает желаемые пределы в конкретные моменты времени, например при техническом обслуживании и тестировании, а могут также перемещаться в ответ на заранее заданные установки диапазона перемещения челночного устройства. Следует отметить, что всем транспортным машинам гаража 100, используемым для перемещения загруженного или пустого поддона, включая несущие модули (то есть верхний несущий модуль и нижний несущий модуль), соответствуют графические изображения и связанные с ними ограничительные маркеры. Ограничительные маркеры устанавливаются в автоматическом режиме программой, а в полуавтоматическом или ручном режиме - оператором.
Объект 450 складирования поддонов (обозначен PST) связан с индикатором 457 подъемника для поддонов (PVL), первой кнопкой 458 челночного устройства для поддонов (обозначена PS#1), предназначенной для открытия первого окна челночного устройства для поддонов, когда соответствующий индикатор 461 режима находится в "полуавтоматическом" (semi-auto) режиме, и второй кнопкой 459 челночного устройства для поддонов (обозначенной PS#2), предназначенной для открытия второго окна челночного устройства для поддонов, когда соответствующий индикатор 463 режима находится в "полуавтоматическом" (semi-auto) режиме.
На фиг.4В более подробно представлены объекты 410 несущих модулей. Объект 410 несущего модуля используется как для нижнего несущего модуля, так и для верхнего несущего модуля. Каждый объект 410 несущего модуля включает информацию для состояния 410А E-Stop, основного состояния ("Ноте") модуля установки на опору 410В, номер 410С несущего устройства, датчик 410D обнаружения вертикального подъемного транспортера и индикатор 410Е "Auto-ready" (автоготовность). Индикатор "Е-Stop" 410A указывает, послан ли сигнал "жесткой остановки системы" для прекращения перемещения и остановки работы несущего модуля 110. Индикатор 410В основного состояния указывает, находится ли модуль установки на опору несущего модуля 110 в исходном положении. Номер 410С блока несущего модуля отображается в верхнем левом углу для идентификации несущего модуля 110, связанного с объектом 410 несущего модуля. Индикатор 410D состояния датчика вертикального подъемного транспортера указывает, был ли обнаружен вертикальный подъемный транспортер 120. В правом верхнем углу индикатор 410Е "Auto-ready" (автоготовность) указывает, готов ли соответствующий несущий модуль 110 или он находится в использовании, когда управляющая программа находится в режиме "Automatic" (Автоматический). Индикаторы 410F датчика указывают, что датчики перемещения работают на обнаружение перемещения несущего модуля 110 для повышения безопасности. Цвет фона объекта 410 несущего модуля может различаться в зависимости от того, работает ли гараж 100 или данный конкретный модуль в автоматическом, полуавтоматическом или ручном режимах. В ручном режиме выбор объекта 410 несущего модуля означает намерение оператора переместить несущий модуль 110. Последующий выбор отсека 114 (внутренней или внешней опоры) вызывает посылку командного сигнала TRAVEL (Переместить), GET (Взять) и PUT (Поместить) - в зависимости от обстоятельств.
Следует отметить, что индикаторы, описанные в связи с фиг.4В и ниже в связи с фиг.4С-4F, являются примерами того, как в этом варианте выполнения изобретения может быть сконфигурировано предприятие парковки и хранения. Можно использовать и другие графические модификации и представления. Гибкость использования таких индикаторов ограничена только управляющим и контрольным программным обеспечением графического интерфейса пользователя, поэтому в графике в зависимости от приложения можно использовать как больше, так и меньше таких индикаторов.
Объект 414А поддона, на который наложена пиктограмма 414В транспортного средства, указывает, что поддон загружен, то есть на поддоне находится транспортное средство или предмет. Если графический символ загруженного поддона (поддон 414А совместно с пиктограммой 414В транспортного средства) размещен поверх объекта 415А модуля установки на опору (фиг.4С), то это указывает, что несущий модуль (например, несущий модуль 110) в настоящее время поддерживает загруженный поддон.
На фиг.4С показан графический объект 415А модуля установки на опору в момент, когда несущий модуль 110 не поддерживает поддон или транспортное средство. Направление стрелки 415В указывает, осуществил ли модуль установки на опору поворот поддерживаемого загруженного поддона. Если загруженный поддон повернут на сто восемьдесят градусов, стрелка 415В направлена вверх. Если загруженный поддон не был повернут, стрелка 415В направлена вниз.
На фиг.4D более подробно показан объект 420 вертикального подъемного транспортера. Область 400 отображения включает также объекты 420 вертикального подъемного транспортера и объекты 430 пункта входа/выхода, представляющие пункт 130 входа/выхода. Каждый объект 420 вертикального подъемного транспортера включает индикатор 421 E-Stop, указывающий, было ли оказано воздействие на транспортер путем запроса на жесткую остановку. Пиктограмма 420 вертикального подъемного транспортера может также включать номер 422 устройства, предназначенный для идентификации конкретного вертикального подъемного транспортера 120, индикатор 423 автоготовности, предназначенный для указания того, что блок готов, когда гараж 100 находится в автоматическом режиме, индикатор "REM In" (модуль установки на опору находится внутри), который активируется, когда модуль установки на опору препятствует вертикальному перемещению вертикального подъемного транспортера 120 в процессе введения загруженного поддона в вертикальный подъемный транспортер 120 или удаления поддона из него. Объект 420 вертикального подъемного транспортера содержит командную кнопку 424, которая позволяет оператору вручную потребовать перемещения вертикального подъемного транспортера 120 на конкретный этаж, когда гараж 100 работает в ручном или полуавтоматическом режиме. Например, оператор, желающий переместить вертикальный подъемный транспортер 120 на первый этаж, может нажать кнопку 424 объекта 420 вертикального подъемного транспортера, имеющуюся в области 400 отображения первого этажа. Если потребуется, пиктограмма 420 вертикального подъемного транспортера может показывать представление 425 автомобиля и/или поддона (аналогичное графическому изображению 414А и 414В загруженного поддона). Если автомобиль присутствует, то выдается идентификационный номер 426 транспортного средства.
На фиг.4Е более подробно показан объект 430 пункта входа/выхода. Каждый объект 430 пункта входа/выхода включает цветовой индикатор 431 внутренней двери и цветовой индикатор 432 внешней двери, которые соответствуют физическим дверям (133 и 131). Когда дверь закрыта, соответствующий объект (431 или 432) двери имеет зеленый цвет. Когда дверь открыта, соответствующий объект (431 или 432) двери имеет красный цвет. Когда дверь находится в промежуточном состоянии между открытым и закрытым положениями, соответствующий объект (431 или 432) двери имеет желтый цвет. Выбор оператором любого объекта (431 или 432) двери заставляет управляющую программу посылать соответствующую команду OPEN (Открыть) или CLOSE (Закрыть). Каждому пункту 130 входа/выхода присвоен номер блока, выдаваемый в индикаторе 441 блока пункта входа/выхода. Каждый пункт 130 входа/выхода включает индикатор 442 "REM In" (модуль установки на опору находится внутри), указывающий, вошел ли соответствующий модуль установки на опору в пункт 130 входа/выхода для извлечения загруженного поддона, и индикатор 443 "PS In" (Челнок поддонов внутри), указывающий, находится ли челнок поддонов в пункте 130 входа/выхода для извлечения или ввода незагруженного поддона. Конечно, при желании могут быть показаны транспортное средство и поддон, указывающие на присутствие загруженного поддона.
На фиг.4F показано графическое представление компонентов челночного перемещения, складирования, накопления и доставки поддонов для обслуживания пункта 130 входа/выхода в гараже 100. Как сказано выше в отношении фиг.4А, соответствующие объекты включают объект 450 складирования поддонов, объект накопления поддонов 460 и объект 455 челночного перемещения поддонов. Объект 455 челночного перемещения поддонов представляет собой оборудование для челночного перемещения поддонов (не показано) и перемещается между объектом 450 складирования поддонов, объектом 460 накопления поддонов и любым из объектов 430 пункта входа/выхода для управления подачей поддонов согласно способу складирования и доставки поддонов, используемому в гараже 100. Ограничительные маркеры 452 для челночного перемещения поддонов задают диапазон перемещения фактического оборудования для челночного перемещения поддонов (представленного объектом 455 челночного перемещения поддонов) для текущей команды.
Каждый этаж гаража может быть представлен приложением по управлению гаражом. Согласно предпочтительному варианту выполнения настоящего изобретения каждый этаж гаража 100 представлен в окне Main Control (Главное окно управления), как показано на фиг.2А-2С, хотя в случае, если изображение гаража 100 превышает размеры, пригодные для отображения в единственном общем окне, можно использовать вторичные окна.
На фиг.5 более подробно показана область 500 отображения седьмого этажа окна Main Control на фиг.2. Область 500 отображения седьмого этажа включает многие из элементов, аналогичных показанным в области 400 отображения первого этажа, за исключением того, что она не включает объекты, связанные с пунктами 130 входа/выхода. В отличие от первого этажа, седьмой этаж гаража 100 не имеет прямого доступа к какой-либо области вне гаража 100. Как показано на чертеже, область 500 отображения седьмого этажа включает объекты, представляющие проход 512 верхнего этажа, два верхних несущих модуля 510, способных перемещаться по проходу 512, множество отсеков 502 для хранения (аналогичных отсекам 114 для хранения), включающих внутреннюю опору 516 внутреннего ряда и внешнюю опору 518 внешнего ряда, и доступ к двум вертикальным подъемным транспортерам 420. Кроме того, область 500 отображения седьмого этажа включает объекты, представляющие состояние и содержимое седьмого этажа гаража 100. Например, имеются ограничительные маркеры 504, предназначенные для ручного управления диапазоном перемещения соответствующего верхнего несущего модуля 510 в верхнем проходе 512.
На фиг.6 более подробно представлена панель 600 Store Car (Помещение автомобиля на хранение), изображенная на фиг.2А. Панель 600 Store Car включает четыре индикатора-табло 610 пункта входа/выхода, которые отображают текст, представленный на табло каждого из четырех пунктов 130 входа/выхода. Каждое табло представляет часть службы передачи сообщений управляющей программы, выполняемой управляющим компьютером, для передачи инструкций водителю транспортного средства, находящегося в пункте 130 входа/выхода. Служба передачи сообщений включает интерфейс, в котором используется обратная связь от различных датчиков, включая, например, телевизионные камеры, датчики движения и измерительные устройства. Выходные сигналы датчиков принимаются и анализируются управляющей программой, которая определяет, какие инструкции (и/или звуковые сигналы) представить водителю посредством табло.
Кроме того, панель 600 Store Car содержит четыре объекта 620 автомобильной очереди. Каждый объект 620 автомобильной очереди связан с транспортным средством в соответствующем пункте 130 входа/выхода, ожидающим постановки на хранение. Как показано на чертеже, два пункта 130 входа/выхода содержат транспортные средства или предметы, ожидающие постановки на хранение, в то время как другие два пункта 130 входа/выхода пусты. Соответствующий идентификационный номер 616 отсека показан в верхнем левом углу каждого объекта 620 очереди, а идентификатор 618 транспортного средства показан в нижнем левом углу каждого объекта 620. Кнопка 612 "Clear Queue" (Очистка очереди) позволяет оператору удалить информацию, показанную в связи с очередью автомобилей, ожидающих постановки на хранение вне гаража 100. Кнопка 614 "Store" (Хранение) и кнопка 622 "Autostore (Автохранение) предназначены для произвольного и автоматического инициирования соответствующего сценария выбора транспортного средства из очереди для хранения. Оба объекта (614 и 622) "Store" и "Autostore" при обычной работе могут быть заблокированы.
На фиг.7 более подробно показана панель 700 Retrieve Car (Извлечение автомобиля), изображенная на фиг.2А. Панель 700 Retrieve Car включает четыре текстовых поля 710 для табло, связанных с состоянием извлечения транспортных средств, по одному полю на каждый пункт 130 входа/выхода, в этих полях присутствует информация с инструкциями для водителя транспортного средства, представленная на табло в вестибюле 124. Как и в случае с хранением транспортного средства, управляющая программа взаимодействует с водителем транспортного средства посредством средств ввода в вестибюле 124. Клиент запрашивает извлечение транспортного средства через средства ввода, например, клавиатуру, считыватель метки, позиционирующее устройство ввода, устройство для голосового ввода данных или другие удобные средства для ввода информации в систему. Первое поле 712 показа повторяет сообщения о состоянии, показываемые первому клиенту, запрашивающему извлечение своего транспортного средства. Когда извлечение данного транспортного средства или предмета можно произвести, сообщение о состоянии указывает время, когда затребовано транспортное средство, и просит пользователя предъявить свою бирку (например, радиометку, дебетовую карточку, кредитную карточку или билет). Второе поле 714 показа повторяет сообщения о состоянии, показываемые второму клиенту, запрашивающему извлечение своего транспортного средства.
Табло и пользовательский интерфейс для клиента, предназначенные для помещения на хранение и извлечения транспортных средств, представляют собой средство рекламы и посылки сообщений клиентам. Таким образом, как во многих обычных системах, это средство может быть приспособлено для включения кратких рекламных объявлений, стимулирования клиента и т.п., когда он взаимодействует с интерфейсом или смотрит на указанное средство. Кроме того, указанное средство передачи сообщений может облегчить создание некоторой обратной связи, когда клиенту предлагаются один или два коротких вопроса, а ответы на них записываются в базу данных и используются для улучшения работы гаража или для других целей по усмотрению владельца гаража.
С первым полем 712 отображения связан первый объект 716 клавиатуры, который демонстрирует информацию, введенную с клавиатуры первым клиентом, когда он запрашивает свое транспортное средство из вестибюля 124 гаража 100. Оператор может выбрать этот объект 716 клавиатуры, в результате чего открывается экран, позволяющий оператору ввести запрос (или идентификационную метку) транспортного средства. Со вторым полем 714 отображения связан второй объект 718 клавиатуры, который демонстрирует информацию, введенную с клавиатуры вторым клиентом, когда он запрашивает свое транспортное средство. Оператор может выбрать этот объект 718 клавиатуры, в результате чего открывается экран, позволяющий оператору ввести запрос (или идентификационную метку) транспортного средства. Как указано, выбор оператором клавиатуры 716 или клавиатуры 718 приводит к открытию окна, позволяющего ввести запрос на извлечение транспортного средства.
Кроме того, панель 700 Retrieve Car (Извлечение автомобиля) включает объект 720 "Tag Reader" (Считывание метки), который демонстрирует оператору идентификационный номер транспортного средства, который кодирован на билете клиента, выданном в процессе постановки на хранение. Эта информация о метке появляется после того, как клиент ввел билет в считыватель карточки (метки или кредитной карточки), имеющийся в вестибюле 124, как предписано командой, показанной во втором поле 714. Оператор также может выбрать этот объект, в результате чего открывается другой экран, позволяющий оператору вручную ввести информацию по идентификации метки, чтобы инициировать извлечение соответствующего транспортного средства.
При постановке транспортного средства на хранение, что связано с экраном, показанным на фиг.6, клиент вводит бирку в устройство для считывания, что вызывает запирание внешней двери 131 пункта входа/выхода. После этого механизмы работают, перемещая загруженный поддон из пункта 130 входа/выхода и помещая загруженный поддон в вертикальный подъемный транспортер 120. Вертикальный подъемный транспортер 120 перемещается на заданный этаж, где несущий модуль этого этажа извлекает загруженный поддон из вертикального подъемного транспортера 120 и помещает его в заданный отсек 114 для хранения. Следует отметить, что для облегчения инициации процесса хранения в каждом пункте 130 входа/выхода имеется соответствующий считыватель метки (или кредитной карточки), например, расположенный снаружи от соответствующего пункта 130 входа/выхода, Процесс "Извлечения" инициируется из вестибюля 124 посредством одного или нескольких считывателей меток.
Панель 700 Retrieve Car содержит также объект 722 "Retr Random" (Произвольное извлечение), который при его выборе включает сценарий для генерации произвольного запроса на транспортное средство в гараже 100 и вводит идентификационную метку. Точно так же при выборе объекта 724 "Auto Retr" (Автоматическое извлечение) включается сценарий для генерации автоматического запроса на транспортное средство в гараже 100. При обычной работе оба объекта (724 и 722) "Retr Random" и "Auto Retr" можно заблокировать.
На фиг.8 показан экран 800 Main Diagnostic (Главный диагностический), который появляется в ответ на выбор оператором кнопки 326 Diagnostics (Диагностика) на глобальной панели 300 управления, показанной на фиг.3. Экран 800 Main Diagnostic позволяет оператору увидеть всю конфигурацию гаража 100 и получить более подробную диагностическую информацию относительно конкретных выбранных компонентов. Большая часть диагностического экрана 800 показывает сечение гаража 100, причем этажи показаны по оси Y, а проходы или ряды представлены по оси X. Например, в позиции 809 первый вертикальный подъемный транспортер (обозначен как VLC-1) показан на седьмом этаже в пятом проходе, а в позиции 810 второй вертикальный подъемный транспортер (обозначен как VLC-2) показан на седьмом этаже в десятом проходе. Таким образом, когда фактический вертикальный подъемный транспортер 120 поднимается или спускается через этажи в гараже 100, соответствующие графические объекты (809 и 810) вертикального подъемного транспортера отслеживают это вертикальное перемещение, давая оператору информацию о точном состоянии этих устройств. Изображены и главные компоненты гаража 100, например, позицией 812 обозначен первый нижний несущий модуль (LCM-1), который показан в проходе 1 этажа 1. Верхний несущий модуль (UCM-11) обозначен позицией 820 и расположен в проходе 1 этажа 7. Другие несущие модули на этажах включают второй нижний несущий модуль (LCM-2), который также показан на первом этаже, но в настоящий момент в пятом проходе. Оба графических объекта LCM-1 и LCM-2 (здесь в текстовом формате) перемещаются по экрану 800 при перемещении соответствующих устройств на первом этаже. На этом чертеже графические объекты LCM-1 первого этажа, UCM-1 второго этажа, UCM-3 третьего этажа, UCM-5 четвертого этажа, UCM-7 пятого этажа, UCM-9 шестого этажа и UCM-11 седьмого этажа - все находятся в первом проходе.
Гараж (или склад) 100 выполнен с двумя несущими модулями на этаж, причем второй несущий модуль каждого этажа показан в другом месте, что отражает фактическое расположение соответствующих устройств. Таким образом, второй графический символ несущего модуля (UCM-2) второго этажа расположен в пятом проходе; второй графический символ несущего модуля (UCM-4) третьего этажа расположен в седьмом проходе; второй графический символ несущего модуля (UCM-6) четвертого этажа расположен в двенадцатом проходе; второй графический символ несущего модуля (UCM-8) пятого этажа расположен в десятом проходе; второй графический символ несущего модуля (UCM-10) шестого этажа расположен в шестом проходе и второй графический символ несущего модуля (UCM-12) седьмого этажа расположен в восьмом проходе. Следует отметить, что пара несущих модулей для любого данного этажа, например UCM-9 и UCM-10 шестого этажа, в основном имеют перекрывающиеся диапазоны перемещения, однако понятно, что никакие два несущих модуля не могут занимать одно и то же пространство одновременно. Таким образом, соответствующие текстовые символы не могут ни пересекать друг друга, ни находиться в одном и том же проходе этажа одновременно.
Графические представления, связанные с оборудованием для челночного перемещения поддонов, изображены в нижней части экрана 800 Main Diagnostic. Например, в позиции 814 первое устройство (PS-1) для челночного перемещения поддона показано в положении, связанном с первым проходом. Второе устройство (PS-2) для челночного перемещения поддона показано в положении, связанном с восьмым проходом. Следует отметить, что графические символы 816 пункта входа/выхода позиционированы согласно фактическому расположению пункта 130 входа/выхода с общей конфигурацией, показанной на фиг.1. Первый пункт 130 входа/выхода выполнен в третьем проходе, второй пункт 130 входа/выхода выполнен в пятом проходе, третий пункт 130 входа/выхода выполнен в десятом проходе, а четвертый пункт 130 входа/выхода выполнен в двенадцатом проходе. В действительности устройства для челночного перемещения поддонов, обозначенные соответствующими графическими символами (PS-1 и PS-2), работают в рельсовой челночной системе, созданной под многими пунктами 130 входа/выхода. Однако представление соответствующих графических символов для такого структурного расположения затруднило бы визуализацию состояния устройств для челночного перемещения поддонов. Поэтому графические символы устройства для челночного перемещения поддонов показаны в области 814 устройства для челночного перемещения поддонов. Поскольку в рельсовой челночной системе перемещения поддонов, которая в данном случае содержит два челнока, они не могут обходить друг друга, соответствующие графические символы на дисплее 800 для устройства для челночного перемещения поддонов не перемещаются друг сквозь друга. В PVL-объекте 818 (объекте подъемника для поддонов) показано, что подъемник для поддонов находится на первом этаже. Однако он может быть поднят на второй этаж либо для извлечения оттуда штабеля поддонов, либо для перенесения туда штабеля поддонов. Если он окажется на втором уровне, то PVL-объект 818 укажет его положение.
В самом низу экрана 800 Main Diagnostic имеются также кнопки, представляющие устройство 822 для складирования поддонов, устройство 824 для накопления поддонов и множество кнопок, позволяющих оператору проводить диагностику отдельных систем гаража 100. Несколько видов дополнительно поддерживаемой диагностики включают очистку поддона (связана с кнопкой 830 "Pal. Cleaning" (Очистка поддона)) и кнопку 832 "DSM" (цифровой сервомодуль). Выбор кнопки 832 DSM вызывает появление экрана, на котором показаны технические детали, относящиеся к конфигурациям сервоусилителя и сервомотора. Кнопка 834 "FAR" определяет местоположение в гараже 100 в FAR-координатах, где F - номер этажа, А - номер прохода и R - номер ряда; кнопка 836 "Ethernet Diag" (Диагностика сети Ethernet) предназначена для инициации диагностики связи; кнопка 838 "PCL Diagnostic" (Диагностика контроллера программируемой логики) предназначена для инициации диагностики контроллера программируемой логики; кнопка 840 "L2 Test" (L2 тест) предназначена для инициации цикла тестирования, выбранного кнопкой 334 на фиг.3; кнопка 842 "MENU" (Меню) вызывает появление меню; кнопка 844 "Maintenance Log" (Журнал обслуживания) предназначена для получения доступа и показа журнала обслуживания и рабочих циклов различных компонентов различных модулей в гараже; и объект 846 "PLC Status Info" (Информация о состоянии контроллера программируемой логики) предназначен для представления информации о состоянии контроллеров программируемой логики, используемых для управления и контроля систем гаража 100. Операторская графика 848 позволяет оператору перейти к окну 200 MAIN (Главное), в котором демонстрируется существующая конфигурация и информация о конфигурации, охватывающей все системы гаража.
На фиг.9А и фиг.9В показан экран 900 Upper Carrier Module Diagnostic (Диагностика верхнего несущего модуля). Каждый графический элемент гаража 100, показанный на экране 800 Main Diagnostic, можно выбрать для получения дополнительной информации. Следует отметить, что каждый модуль, показанный на экране 800 на фиг.8 и экране 200 на фиг.2, имеет такую детализированную диагностику и экран ручного управления. Например, выбор оператором верхнего несущего модуля UCM-12, связанного с позицией 820, вызывает появление более подробного экрана, например экрана 900 Upper Carrier Module Diagnostic. Верхний ряд 902 иллюстрирует тринадцать опор для хранения, которые в данном конкретном варианте выполнения изобретения идут вдоль гаража 100. Другой вариант выполнения гаража может включать большее или меньшее количество опор для хранения. Первая опора 904 для хранения имеет первое индексное (или отсчетное) значение 906, равное 664920, а каждая последующая опора хранения 2-13 имеет индекс, кратный этому значения. Первое индексное значение 906 определяет линейное расстояние до самого дальнего края первого опоры 904 для хранения от левого конца (обозначенного также "South End" (Южный Конец)). Аналогично со второй опорой 908 связано второе индексное значение 910, равное 1329840, которое равно умноженному на 2 первому индексному значению 906. Второе индексное значение 910 определяет линейное расстояние от самого дальнего края второй опоры 908 для хранения до левого конца (обозначенного также "South End" (Южный Конец)). Отсчетные значения относятся к количеству отсчетов на один оборот вала кодера, например 8000 отсчетов на одно вращение. Таким образом, многократные вращения переводят конкретный кодер на некоторое линейное расстояние от заданной исходной позиции.
Экран 900 Upper Carrier Module Diagnostic включает также графический символ 912 состояния цифрового сервомодуля, который отображает информацию о цифровом сервомодуле для соответствующего верхнего несущего модуля, выбранного на экране 800 Main Diagnostic (в данном случае, модуля UCM-12). Информация о состоянии цифрового сервомодуля включает положение на оси Х верхнего несущего модуля на основе команды системы управления, код состояния для оси X, первый код сервоошибки, второй код сервоошибки, значение двигателя кабельного барабана, поле rem_home, поле faults и поле commreq_fault. Кнопка 914 Clear Servo Fault ("Сброс сервоошибки" позволяет оператору сбросить состояние ошибки после того, как она была устранена, или просто по усмотрению оператора. "Кнопка" 916 "System Stop" (Остановка системы) позволяет оператору немедленно остановить работу верхнего несущего модуля. Управляющий объект 918 "X-Axis Jog" (Медленное смещение по оси X) позволяет оператору выбрать управление Left Jog (Медленно влево) или Right Jog (Медленно вправо) для медленного смещения верхнего несущего модуля (с малой скоростью) влево или вправо соответственно по проходу для несущего модуля на седьмом этаже.
Графический символ 920 введения несущего модуля (обозначенный как "Stop@EYE" (Остановись и смотри)) позволяет оператору контролировать состояние несущего модуля при его перемещении поперек "С Line" (линия С) и в конечном счете приводит к активации фотодатчика вблизи от задней части опоры 904, которая обозначена как "D Line" (линия D). Кроме того, графический символ 920 позволяет оператору отключить любую или обе из систем фотодатчиков линии С и линии D и полностью исключить оба эти фотодатчика путем активации области "Eye Bypass" (Визуальный контроль).
Объект 922 ручного управления цифровым сервомодулем позволяет оператору вручную установить значения для цифрового сервомодуля и осуществить отработку этого значения цифровым сервомодулем. Для этого объект 922 ручного управления цифровым сервомодулем включает поле значения, в которое оператор вводит некоторое значение путем выбора кнопки Value (Значение), кнопку Run (Пуск) для инициализации отработки значения цифрового сервомодуля, кнопку Abort (Аварийное прекращение) для остановки отработки значения цифровым сервомодулем и кнопку Override (Отмена) для сброса существующего значения и установки значения по умолчанию.
Экран 900 Upper Carrier Module Diagnostic включает также "Р-значение" цифрового сервомодуля, предназначенное для контроля соответствующих значений отсчетов для девяти "Р-значений" (Р1-Р9). "Р-значение" преобразуется в дюймы для каждого третьего "Р-значения", то есть Р3, Р6 и Р9. "Р-значения" включают представляющую интерес информацию; Р1 относится к первому значению скорости; Р2 относится к первому значению ускорения; Р3 относится к первому параллельному перемещению; Р4 относится ко второму значению скорости; Р5 относится ко второму значению ускорения; Р6 относится ко второму параллельному перемещению; Р7 относится к третьему значению скорости; Р8 относится к третьему значению ускорения; Р9 относится к третьему значению параллельного перемещения. Эти величины являются параметрами для конфигурационных профилей сервомоторов несущих модулей. Следует отметить, что каждому модулю установки на опору соответствует отдельный экран для отображения соответствующей информации. Экран 900 Upper Carrier Module Diagnostic включает также графический символ 926 положения верхнего несущего модуля по оси X, который позволяет оператору позиционировать верхний несущий модуль в проходе для несущего модуля в полуавтоматическом режиме. Графический символ 926 позиционирования включает поле Counts (Счетчик), в которое оператор вводит информацию по отсчету, поле Position (Позиция), в которую можно ввести номер позиции, и кнопку "Request New Position" (Запрос новой позиции), при выборе которой верхний несущий модуль перемещается в соответствии с показаниями счетчика и значением позиции.
Кроме того, экран 900 Upper Carrier Module Diagnostic включает графический символ 928 "UCM Other Windows" (Другие окна для верхнего несущего модуля), который позволяет оператору установить Ограничители "Южный конец" и "Северный конец" (то есть диапазон по оси х) для обоих верхних несущих модулей (UCM-11 и UCM-12), перемещающихся по проходу для несущего модуля на седьмом этаже.
Кроме того, экран 900 Upper Carrier Module Diagnostic включает графический символ 930 "Manual DSM "P" Value" (Ручной ввод Р-значения для цифрового сервомодуля"), который позволяет оператору вручную установить значения Р1 и Р2 в счетчиках для верхнего несущего модуля. Графический символ 932 "Difference" "Разность" позволяет оператору ввести разностные значения счетчика, если отсчеты для D-линии и С-линии отличаются друг от друга, например, в случае различия конструкции здания по этим осям.
Кроме того, экран 900 Upper Carrier Module Diagnostic включает графический символ 934 таймера, который отображает индикатор выполнения, относящийся ко времени, прошедшему при транспортировке загруженного поддона в отсек или из отсека. Графический символ 936 позиционирования позволяет оператору выбрать Восточную/Западную позицию в загруженном поддоне на опоре в процессе введения туда автомобиля. В случае рассогласования между С и D-линиями оператор должен указать, по которой стороне выполнять позиционирование. Графический символ 938 Manual/Auto (Ручной/Автоматический) позволяет оператору включить ручной режим для ввода всех параметров посредством экрана 900 или автоматический режим.
Кроме того, экран 900 Upper Carrier Module Diagnostic включает графический символ 940 навигации, который позволяет оператору выбрать другие экраны для просмотра. Например, другой экран Diagnostic (Диагностика), экран REM (модуль установки на опору), экран UCM Overview (Обзор верхнего несущего модуля), который заставляет "всплыть" детализированный экран для верхнего несущего модуля, на котором показаны все датчики и их состояние, экран Main (Главный), экран Menu (Меню) и экран Alarm (Тревога).
На фиг.10 показана последовательность операций, поясняющая основы работы автоматизированной гаражной системы. На шаге 1010 приложение по управлению гаражом заставляет компьютер выдать графическое представление этажа для автоматизированного парковочного гаража. В предпочтительном варианте выполнения изобретения отображается каждый этаж автоматизированного гаража.
На шаге 1012 функциональные компоненты автоматизированного гаража отображают относительно изображенного представления этажа. Функциональные компоненты автоматизированного гаража включают пункты входа/выхода, несущие модули, модули установки на опору, опоры для хранения, вертикальные подъемники для поддонов и вертикальные подъемные транспортеры. То есть все механические компоненты, необходимые для постановки на хранение или извлечения автомобилей или предметов на автоматизированном предприятии показывают в отношении их работы и/или расположения на данном этаже гаража. Показ этих компонентов позволяет оператору точно представить состояние этажа в автоматизированном гараже. Конечно, некоторые из этих компонентов могут также иметь управляющие элементы, позволяющие оператору изменять состояние компонента.
На шаге 1014 приложение по управлению гаражом отображает множество объектов управления. Каждый объект управления связан с управлением какой-либо стороной автоматизированной системы парковки. Примеры объектов управления включают, например, кнопку 322 "Manual" (Ручной), кнопку 324 "Automatic" (Автоматический) и кнопку 310 "Halt All" ("Остановить все"), описанную более подробно в отношении фиг.3. При выборе объекта, представляющего компонент автоматизированного гаража, оператор может изменить состояние компонента, связанного с выбранным объектом. При выборе объекта управления оператор может управлять автоматизированной системой парковки согласно функции, связанной с выбранным объектом управления. На шаге 1016, если гараж все еще функционирует, управляющая программа продолжает обновлять отображение объектов и осуществляет опрос входа, а затем возвращается назад на шаг 1012.
На фиг.11 показан экран 1100 доступа к базе данных 1100, благодаря которому оператор может получить доступ к хранящимся данным. База данных, представляющая собой часть системы управления, хранит информацию о клиенте, регистрирует все запросы на хранение и извлечение и регистрирует все значения времени обслуживания. Из этих хронологических данных можно извлечь информацию, показывающую тенденции использования гаража клиентами, рабочие характеристики гаража и т.д.
Экран 1100 доступа к базе данных включает четыре главные ссылки на другие экраны. При выборе ссылки 1102 Drivers (Водители) открывается экран "Водители" (не показан), с помощью которого оператор может просмотреть список входной информации о клиенте, когда клиент решил поместить свое транспортное средство в гараж 100. Такая информация о водителе включает, например (но не ограничивается этим), идентификационную метку, присвоенную транспортному средству водителя, время и дату входа и выхода из пункта 130 входа/выхода, продолжительность хранения и любую другую информацию, которую оператор пожелает включить в базу данных, связанную с информацией о водителе. Кроме того, если контракты клиента с владельцем гаража предусматривают длительное использование гаражного предприятия, информация о водителе может включать имя клиента, его адрес, место изготовления транспортного средства, номер лицензии модели и другую персональную информацию, например способ периодической оплаты, текущий счет клиента и т.д.
Экран 1100 доступа к базе данных включает также ссылку 1104 Retrieve Log (Журнал извлечения), при выборе которой открывается окно, где представлена информация об извлечении для определенного периода времени. Например, информация об извлечении может включать всю информацию по транспортным средствам и отсекам для транспортных средств, извлеченных в течение определенного дня, месяца и т.д.
На фиг.12 показан экран 1200 Retrieve Cycle Times (Время цикла извлечения), к которому получают доступ через ссылку 1106 Retrieve Cycle Times (Время цикла извлечения) на экране 1100 доступа к базе данных. На экране 1200 Retrieve Cycle Times представлена информация о циклах извлечения для нескольких этажей гаража 100 и для определенного промежутка времени, например, за день, за неделю, за месяц и т.д. Время цикла извлечения показано для каждого транспортного средства, полностью обработанного в течение цикла извлечения. На этом конкретном чертеже экран 1200 Retrieve Cycle Times демонстрирует информацию по дням. Информация о времени цикла извлечения включает Date (Дату), Time (Время), когда цикл извлечения был инициирован, Идентификатор транспортного средства, вовлеченного в процесс извлечения, Момент времени "From" (От), момент времени "То" (До) и информацию о времени обработки на этаже не начального уровня (обозначенной как Above Floor Handling (Обработка на верхнем этаже)) и обработки на этаже входного уровня (обозначенной как First Floor Handling (Обработка на первом этаже)). Вся информация о времени извлечения дается в секундах.
Информация Above Floor Handling включает следующую информацию: первое время "Travel" (Перемещение), которое равно времени перемещения несущего модуля данного этажа в соответствующий отсек для хранения с целью получения загруженного поддона; время "Get" (Получение), которое равно времени ввода несущего модуля на опору отсека для хранения (возможно через пустую внутреннюю опору в заполненную внешнюю опору), подхват загруженного поддона и перенос загруженного поддона из отсека для хранения в несущий модуль; второе время "Travel" (Перемещение), которое равно времени перемещения несущим модулем загруженного поддона к вертикальному подъемному транспортеру 120 для перемещения на этаж входного уровня; время "Put V1c" (Помещение V1c), которое равно времени, за которое верхний несущий модуль вводит и ставит загруженный поддон в вертикальный подъемный транспортер 120; и время "Hoist" (Вертикальное перемещение), которое равно времени, затраченному вертикальным подъемным транспортером 120 для спуска загруженного поддона на этаж входного уровня.
Информация First Floor Handling включает следующую информацию: первое время "Travel" (Перемещение), которое равно времени перемещения нижнего несущего модуля первого этажа в соответствующий вертикальный подъемный транспортер 120; время "Get" (Получение), которое равно времени ввода нижнего несущего модуля в вертикальный подъемный транспортер 120, подхват загруженного поддона и перенос загруженного поддона из вертикального подъемного транспортера 120 в нижний несущий модуль; второе время "Travel" (Перемещение), которое равно времени транспортировки нижним несущим модулем загруженного поддона из вертикального подъемного транспортера 120 в пункт 130 входа/выхода на этаже входного уровня; и время "Put EES" (Помещение в пункт входа/выхода), которое равно времени, за которое нижний несущий модуль вводит загруженный поддон в пункт 130 входа/выхода и ставит его там.
Время "Car Available" (Автомобиль доступен) равно полному времени, затраченному на извлечение хранимого транспортного средства с соответствующей опоры для хранения, и включает сумму времени для верхнего этажа: время "Above Floor Handling Get", второе время "Travel", время "Put Vic", время "Hoist", и времени обработки на первом этаже: "Travel", "Get", "Travel" и "Put EES".
На фиг.13 показан экран 1300 Store Cycle Times (Время цикла помещения на хранение), доступ к которому можно получить с помощью ссылки 1108 Store Cycle Times (Время цикла помещения на хранение) на экране 1100 доступа к базе данных. На экране 1300 Store Cycle Times представлен отчет, на котором показано время, затраченное пунктом 130 входа/выхода на подготовку к получению транспортного средства, и продолжительность полного цикла постановки транспортного средства на хранение. На этом конкретном чертеже демонстрируется информация за день. По желанию можно потребовать отчет за другие периоды времени, например за неделю, месяц и т.д.
На фиг.14 показан экран 1400 определения общих размеров и формирования изображения, используемый для представления этих данных, полученных при въезде транспортного средства в пункт 130 входа/выхода гаража 100. Как сказано выше, система определения размеров и формирования изображения выполняет несколько функций. Система определения размеров с помощью электронных средств измеряет габариты транспортного средства, чтобы убедиться, что длина, высота и ширина транспортного средства находятся в допустимых пределах для хранения и транспортировки в системах гаража. В системе определения размеров для установки заданных размеров могут использоваться известные технические решения с применением датчиков, включая (но не ограничиваясь этим) фотодатчики, звуковые датчики и т.д.
Система получения изображения включает несколько фотокамер, стратегически расположенных в пределах пункта 130 входа/выхода так, чтобы сфотографировать транспортное средство в формате изображений под несколькими различными углами. Это делается, в частности, для выявления состояния автомобиля при поступлении его в гараж, чтобы клиент не мог впоследствии заявить о повреждении транспортного средства, нанесенном гаражными системами. Процесс определения размеров происходит в ответ на то, что клиент заводит транспортное средство (или кладет предмет, сдаваемый на хранение) в пункт 130 входа/выхода и позиционирует его должным образом с использованием сообщений на табло (инициированных различными датчиками позиционирования), и в результате, если размеры превышают заданные пределы, клиента уведомляют, что его транспортное средство не может быть поставлено в гараж 100 и его необходимо вывести из пункта 130 входа/выхода. Альтернативно, процесс определения размеров может иметь место, как только управляющий компьютер получает данные от датчиков в пункте 130 входа/выхода, которые указывают, что клиент покинул пункт 130 входа/выхода. В этом случае клиент может быть уведомлен системой передачи сообщений посредством табло или голосового устройства, что транспортному средству отказано в постановке в гараж 100. Процесс получения изображения происходит после того, как процесс определения размеров завершился, поскольку нет необходимости задействовать ресурсы обработки изображений в управляющем компьютере, если транспортному средству будет отказано в постановке на хранение из-за несоответствия размеров.
Размеры транспортного средства также представляются оператору в виде трех полей, в которых указана длина, ширина и высота транспортного средства. Для однозначного определения размеров транспортного средства в поле Vehicle ID (Идентификатор транспортного средства) показан также идентификатор транспортного средства. Конечно, в зависимости от конкретных приложений и реализации может быть показано большее или меньшее количество информации.
В соответствии с вышеизложенным оператор может получить доступ к экрану 1400 для определения размеров и изображения и получить из базы данных ретроспективные данные для транспортного средства, которое когда-то уже было обработано в автоматизированном гараже 100. Кроме того, оператор может видеть результаты процесса по существу в реальном времени, поскольку система сообщает данные обратно в систему управления. Так, в данном конкретном варианте выполнения изобретения блок обработки изображения обеспечивает четыре различных вида: первый вид (View 1), который позволяет получить изображение со стороны водителя транспортного средства и, если фотокамера поднята выше верха транспортного средства, часть верха транспортного средства со стороны водителя; второй вид (View 2), который позволяет получить изображение со стороны пассажира и, если камера поднята выше верхней части транспортного средства, часть верха транспортного средства со стороны пассажира; третий вид (View 3), который позволяет получить изображение передней стороны и капота транспортного средства и, если камера поднята выше верхней части транспортного средства, часть верха с передней стороны транспортного средства; и четвертый вид (View 4), который позволяет получить изображение задней стороны транспортного средства и, если камера поднята выше верха транспортного средства, часть верха транспортного средства с задней стороны.
На фиг.15 показана блок-схема сети, посредством которой можно получить доступ к системе управления предприятием парковки и хранения. Доступ к системе управления 1500 гаражом (или предприятием) можно получить дистанционно по проводной и/или беспроводной сети (например, по глобальной сети связи (GCN) 1502 типа Интернета) причем удаленный оператор 1504 может получить доступ и видеть ту же самую информацию о системе, которую получает оператор в локальном узле 1506. В данном конкретном варианте выполнения изобретения система 1500 управления предприятием включает (но этим не ограничивается) систему 1501 контроля и управления предприятием, локальный узел 1506 оператора для осуществления взаимодействия с помощью интерактивного интерфейса со всеми атрибутами системы 1500 управления, локальный веб-сайт 1507 для обеспечения ограниченного доступа извне к средствам системы управления, множество информационных точек 1508, которые облегчают контроль и управление компонентами предприятия (например, датчики, фотокамеры, компоненты оборудования предприятия, системы передачи сообщений и уведомлений или любые устройства или системы, подходящие для выполнения измерений и/или передачи информации), и программное обеспечение интерактивного интерфейса, обеспечивающее взаимодействие с системой 1500 управления.
Например, система 1500 управления взаимодействует с устройствами сбора данных, например видеокамерами, которые стратегически размещены повсюду в гараже 100, причем оператор предприятия в локальном узле 1506 и/или удаленном узле 1504 может получить доступ к изображениям, даваемым фотокамерой, через глобальную сеть 1502 связи или через локальную сеть. В более надежных реализациях изобретения связь для приема выбранных параметров или системной информации может быть получена, например, через дисплей сотового телефона, пейджинговое устройство, персональное информационное устройство или другие устройства с интерфейсом пользователя, которые обеспечивают связь с сетью.
Кроме того, система 1500 управления дает возможность подачи информации о предприятии парковки и хранения в локальный веб-сайт 1507 предприятия, к которому клиент имеет доступ на предприятии 100 или из удаленного узла 1510 клиента, расположенного в глобальной сети 1502 связи. Таким образом, клиент может заранее планировать парковку, получая в любое заданное время доступ к сайту предприятия (локальному сайту 1507 или удаленному сайту 1514), чтобы получить обновленную информацию о заполнении предприятия 100 (или предприятия 1512), а также о структуре цен за парковку. Клиент может иметь желание запарковать свое транспортное средство на предприятии 100, а посетив вначале сайт предприятия 1507, он может определить, есть ли доступные места для хранения именно на этом предприятии. Это дает клиенту возможность резервирования места в автоматизированном гараже 100, получения права на парковку по фиксированной цене и получения указаний по проезду к предприятию 100.
Система 1516 авторизации оплаты, расположенная в глобальной сети 1502 связи, обеспечивает авторизацию оплаты, так что клиент может представить персональную платежную информацию для резервирования или бронирования желаемого места для хранения посредством глобальной сети 1502 связи. Например, система 1516 авторизации оплаты может проверить кредит клиента в отношении его кредитной карточки. Если кредит клиента подтвержден, тогда в веб-сайт 1507 предприятия подаются сигналы авторизации для выполнения дальнейшей обработки с целью резервирования опоры для хранения. Затем клиенту сообщается код авторизации или уникальный номер такой транзакции. При использовании устройства ввода данных с карточки клиент может зарезервировать место для хранения простым предъявлением кредитной карточки в устройство. Когда клиент приезжает на предприятие 100, он въезжает в пункт 130 входа/выхода и вводит указанный уникальный код, в ответ на что система 1500 управления обрабатывает этот уникальный код и инициирует помещение на хранение транспортного средства или предмета клиента согласно информации о хранении, связанной с дистанционной транзакцией. Конечно, понятно, что транспортное средство или предмет должны отвечать всем заданным критериям в отношении размеров, и лишь тогда транспортное средство может быть поставлено на хранение в гараж 100.
Услуги по парковке, предложенные через сайт предприятия 1507 (или даже пользовательский интерфейс, локальный по отношению к гаражу 100, к которому может получить доступ приехавший или пришедший клиент), позволяют владельцу динамически управлять гаражом. Заполнение в любой конкретный момент и тарифная структура, выбранная владельцем гаража, может, по его желанию, демонстрироваться вне гаража в центрах электронных сообщений и/или на сетевых сайтах, привлекая клиентов специальными расценками. Для этого, и в дополнение к сайту 1507 предприятия, предусмотрен дисплей 1518 динамического управления предприятием, внешний по отношению к предприятию 100. Сайт 1507 предприятия может быть связан с дорожными сетевыми сайтами, так что клиент может "за один раз" сделать резервирование в дороге в удаленном месте. Клиент, прибывая из удаленного места (например, из Калифорнии в гараж 100, расположенный в Нью-Джерси) или из местного пункта (то есть из города, в котором расположен гараж 100), может зарезервировать парковку транспортного средства на предприятии 100 путем простой транзакции с сетевого сайта, при условии, что имеется свободное место. Эта возможность может повысить занятость и доходность предприятия для владельца.
На фиг.16 показана типичная веб-страница предприятия 1600 парковки и хранения, представленная клиенту удаленного узла 1510. К сайту 1507 предприятия можно получить доступ с использованием любого общепринятого браузера, вводя адрес 1602 сайта предприятия. Веб-страница 1600 включает множество выбираемых элементов, посредством которых клиент в удаленном узле 1510 может получить информацию о занятости предприятия 100 и провести транзакцию, чтобы зарезервировать опору для хранения. Следует также отметить, что информация о гараже и транзакция для парковки могут быть доступны удаленному клиенту через систему телефонного автоматического меню или даже путем личных переговоров (человек-человек), если предусмотрены соответствующие технические средства.
Веб-страница 1600 может включать следующее: меню 1604 Facility Location (Местоположение предприятия), в котором клиент может выбрать местоположение гаража; меню 1606 Rate Structure (Тарифная структура), связанное с гаражом, выбранным в меню Facility selection (Выбор предприятия), в котором клиент может выбрать тариф и/или время парковки; меню 1608 Occupancy (Занятость), которое выводит количество доступных отсеков или, в более сложном варианте выполнения изобретения, если он требуется на практике, опцию для выбора конкретной опоры для хранения; меню 1610 Occupancy Date (Дата занятия), которое позволяет клиенту выбрать дату приезда в гараж 100; меню 1612 Occupancy Duration (Продолжительность занятия) для выбора продолжительности хранения транспортного средства в гараже 100; поле 1613 Transaction Code (Код транзакции) для выдачи клиенту уникального кода после завершения транзакции; меню 1614 Method of Payment (Способ оплаты), чтобы клиент мог зарезервировать опору для хранения путем оплаты (например, с помощью кредитной карточки); выбираемый элемент 1616 Login (Регистрация) для тех клиентов, которые являются абонентами автоматизированной гаражной системы, причем процесс регистрации может быть связан со специальными тарифами и данными о заполнении для клиента, являющегося абонентом; поле 1618 Notices (Примечания), где может располагаться информация для пользователей, которые просматривают сайт 1514; гиперссылка 1620 Mapping Website (Картографический веб-сайт), при выборе которой автоматически вставляется адрес выбранного предприятия, в результате чего клиент получает карту или текстовые инструкции о местоположении предприятия 100 (данные о маршруте к предприятию 100 могут быть доступны клиенту в любое время в течение транзакции через любую систему управления локальным трафиком, включая GPS (Глобальную систему позиционирования), при этом GPS система клиента получает информацию о местоположении предприятия 100); гиперссылка 1622 Travel Website (Дорожный веб-сайт), при выборе которой открывается такая веб-страница, на которой клиент может получить доступ к дорожной информации; и гиперссылка 1624 Airline Website (Веб-сайт авиалиний), с помощью которой клиент может быстро получить доступ к информации об авиарейсах в город, где расположено предприятие 100. Кроме того, с сайтом гаража может быть связана гиперссылка на сайт популярного агентства по прокату автомобилей, где информация соответствует городу, в котором расположен автоматизированный гараж. Количество веб-страниц, способ предоставления информации, тип и количество гиперссылок, тип информации и элементы выбора в меню, предоставляемые сайтом 1514 гаража, не ограничены вышеописанным, но могут быть адаптированы для конкретной реализации настоящего изобретения.
Система 1500 управления включает также возможность автоматической идентификации транспортного средства, в которой радиочастотная система опознавания, являющаяся частью информационных точек 1508 предприятия, расположенных на предприятии 100, считывает метку транспортного средства, например ответчик, установленный в подъезжающем транспортном средстве, таким образом обеспечивая автоматический доступ и обработку системой 1501 контроля и управления предприятия. Ответчик содержит информацию, уникально связанную с клиентом, например идентификатор пользователя, так что этот идентификатор пользователя считывается с ответчика, поступает в систему 1501 управления и сравнивается с базой данных клиентов, где информация о клиенте после этого обновляется. Информация о клиенте включает (но этим не ограничивается) время, дату и продолжительность хранения транспортного средства, тип хранимого транспортного средства и любую другую информацию, которую считает важным для хранения оператор гаража. Такие радиочастотные системы с ответчиками традиционно используются в системе контрольных пунктов на платных дорогах, где клиенты платной дороги обычно могут автоматизировать процесс платежа путем установки на транспортное средство ответчика, информация из которого может считываться автоматически при проезде этого транспортного средства через контрольный пункт.
Хотя настоящее изобретение было описано на примере предпочтительных вариантов его выполнения с определенной степенью конкретности, понятно, что это описание предпочтительного варианта выполнения изобретения дано только для примера и возможны многочисленные изменения в деталях конструкции, при этом комбинацию и расположение частей можно изменить без отхода от сущности изобретения.
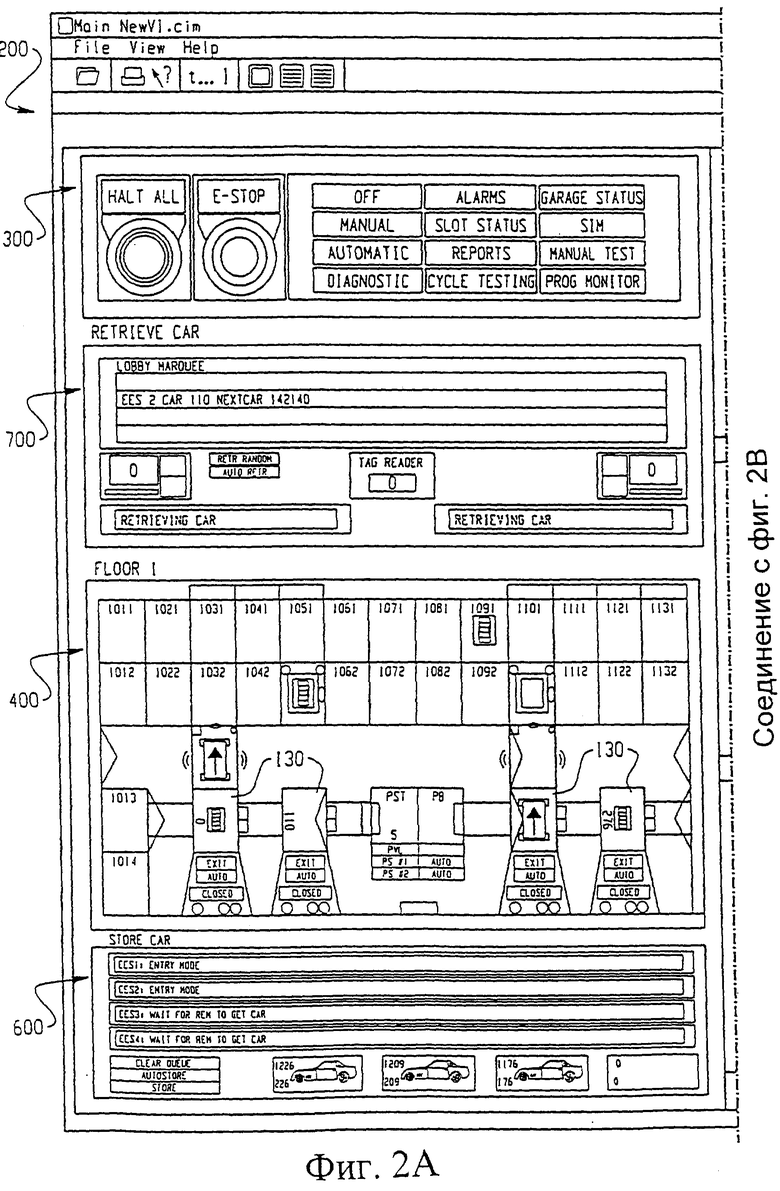
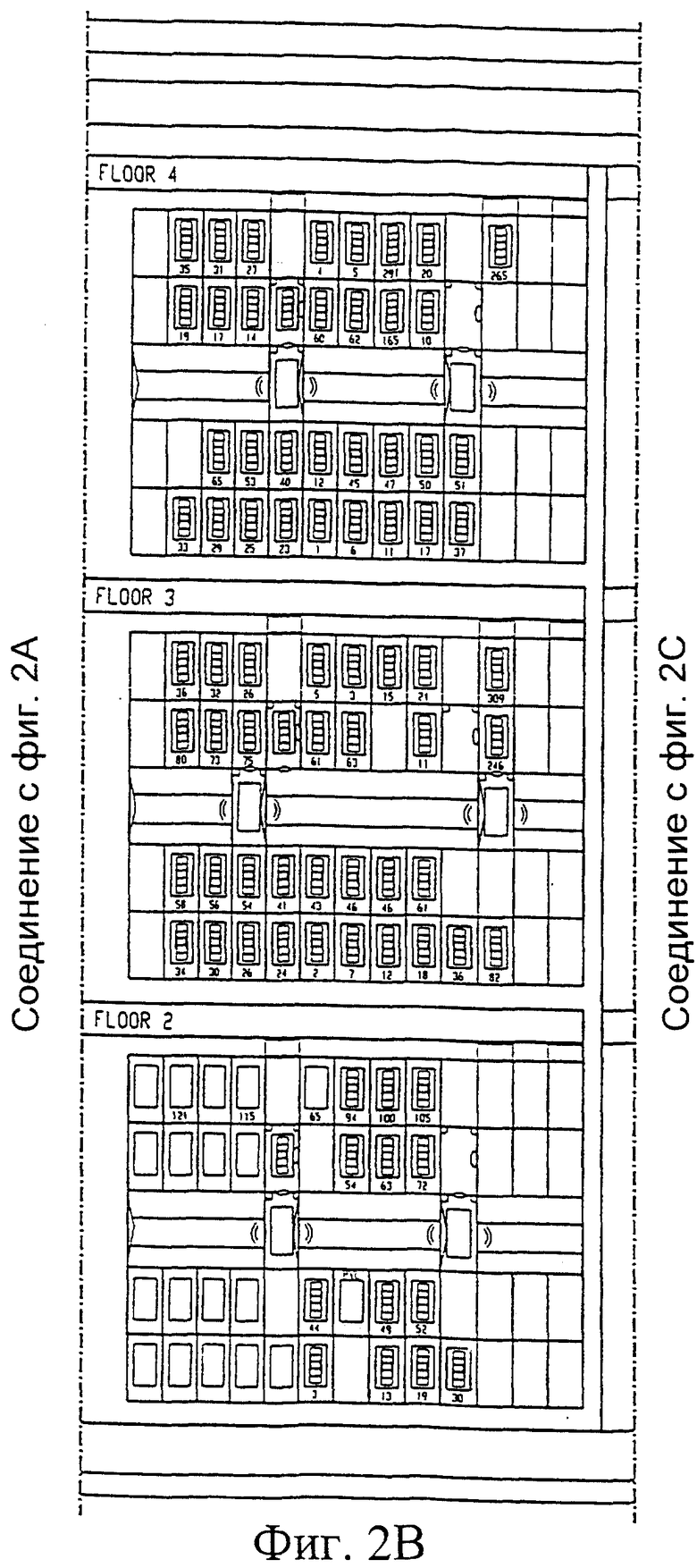
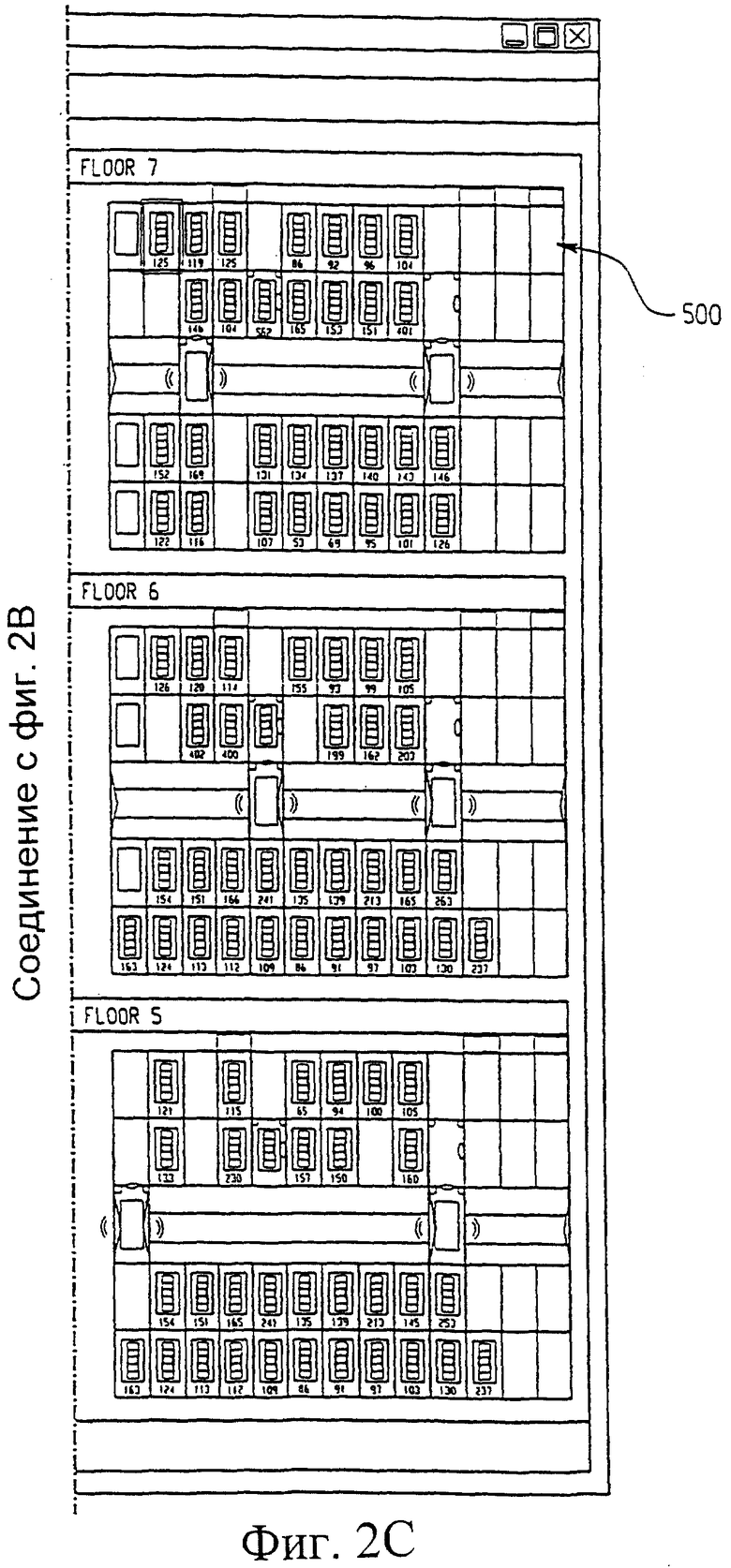
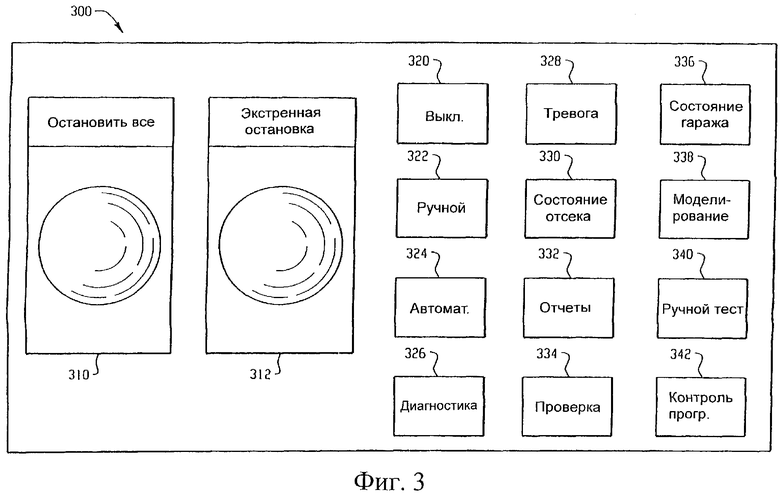
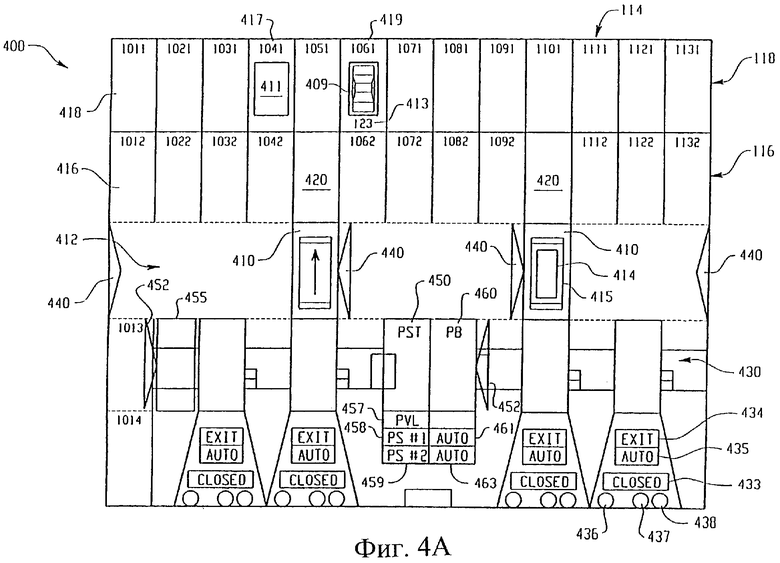
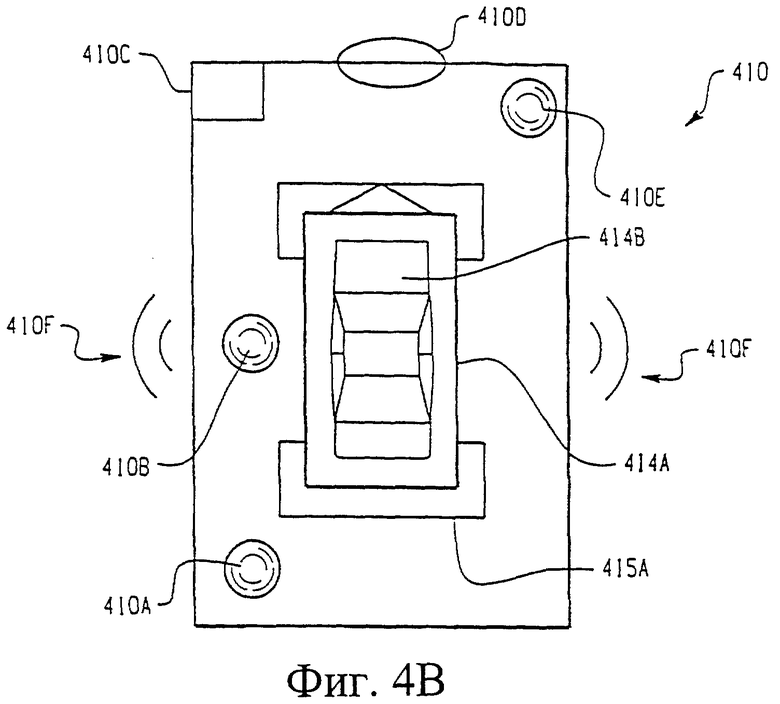
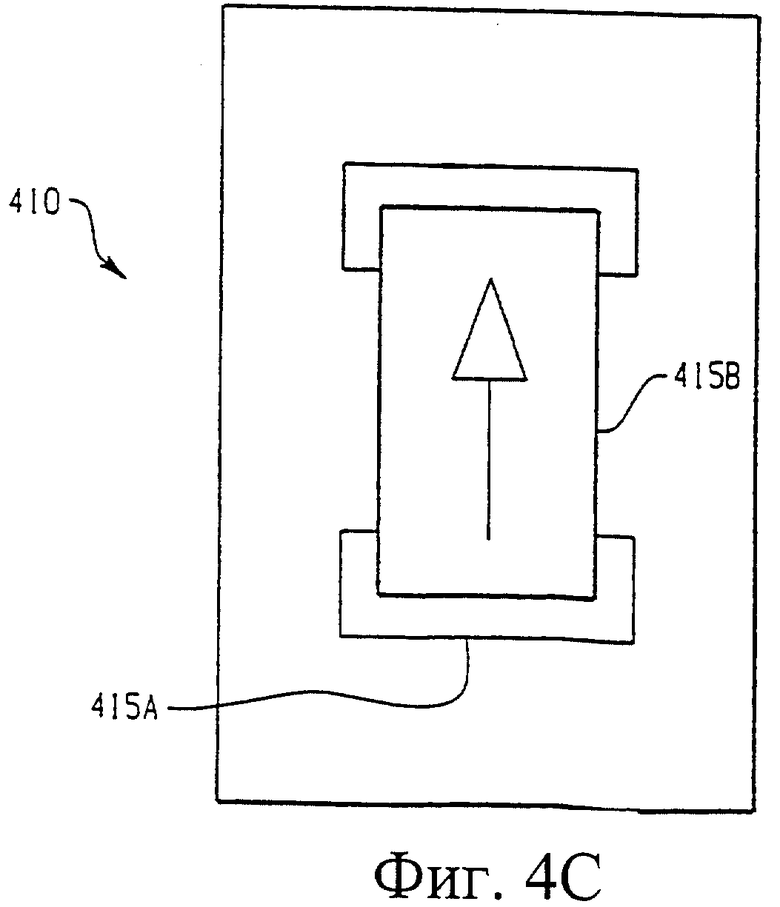
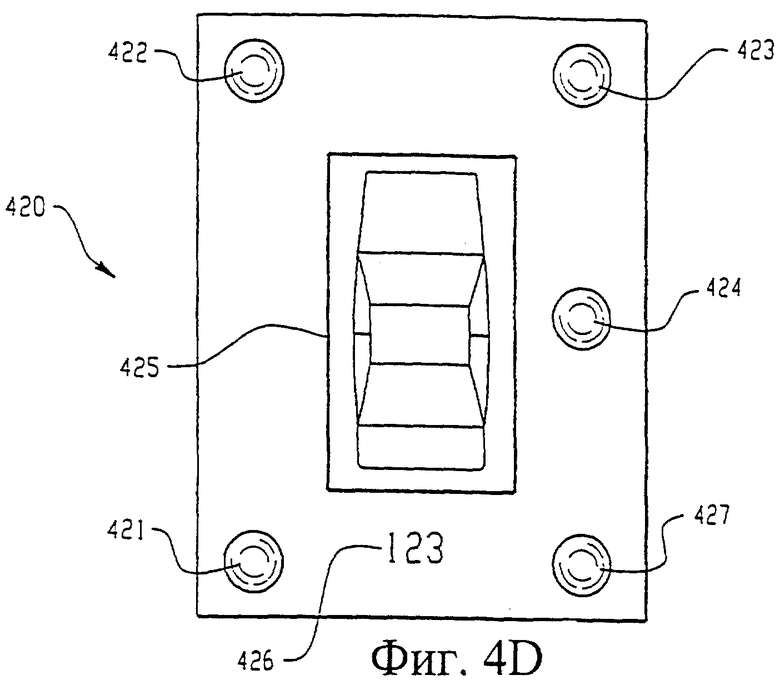
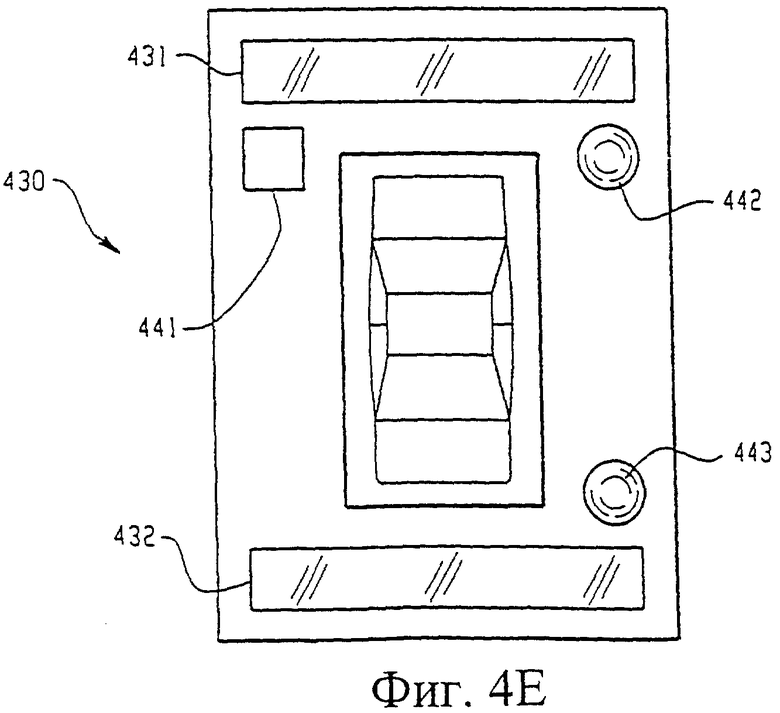
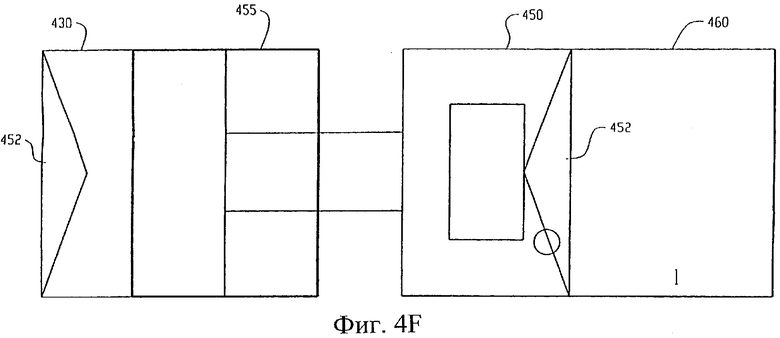
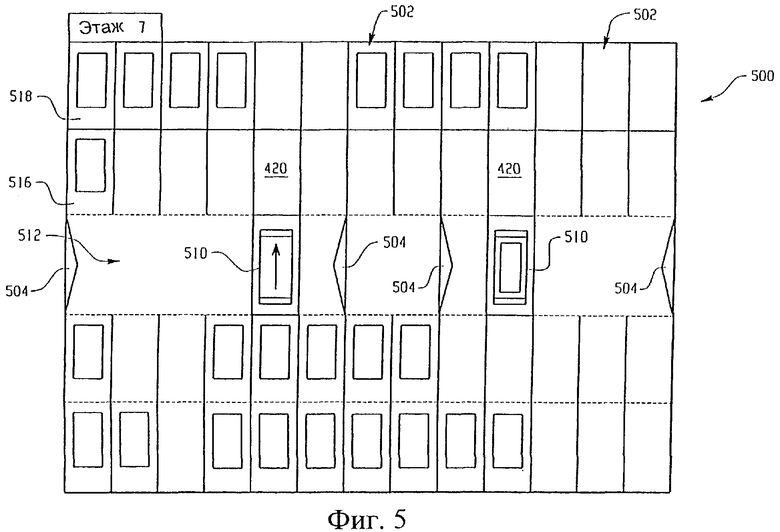
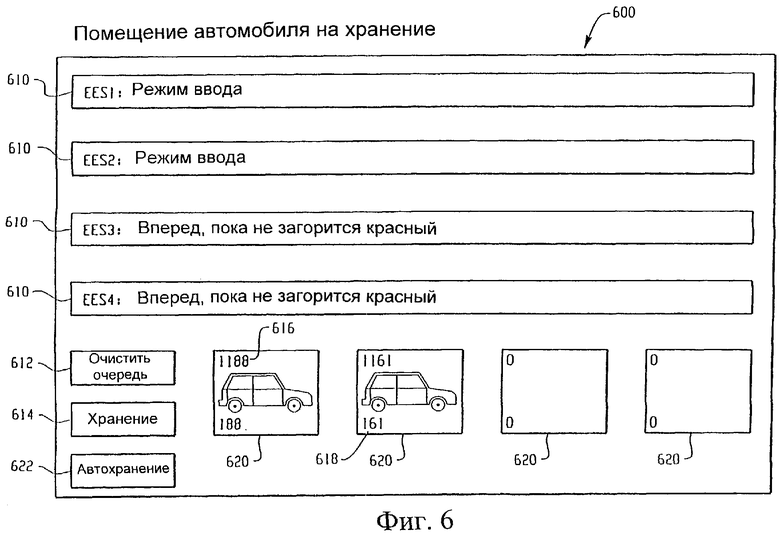
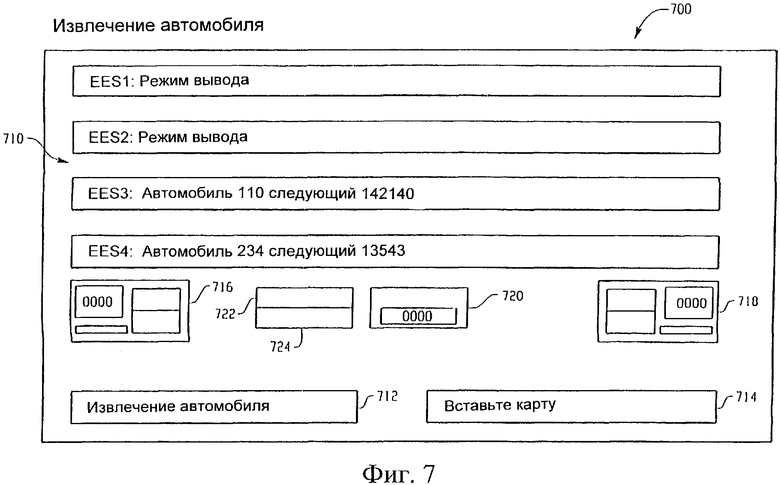
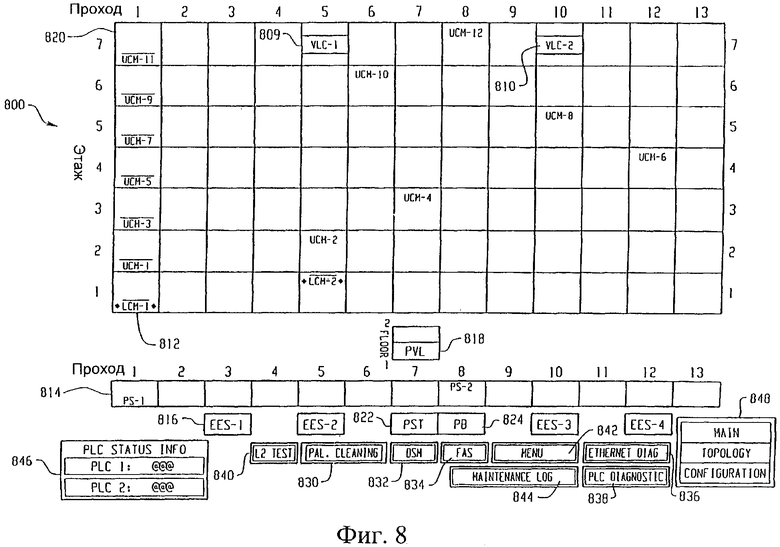
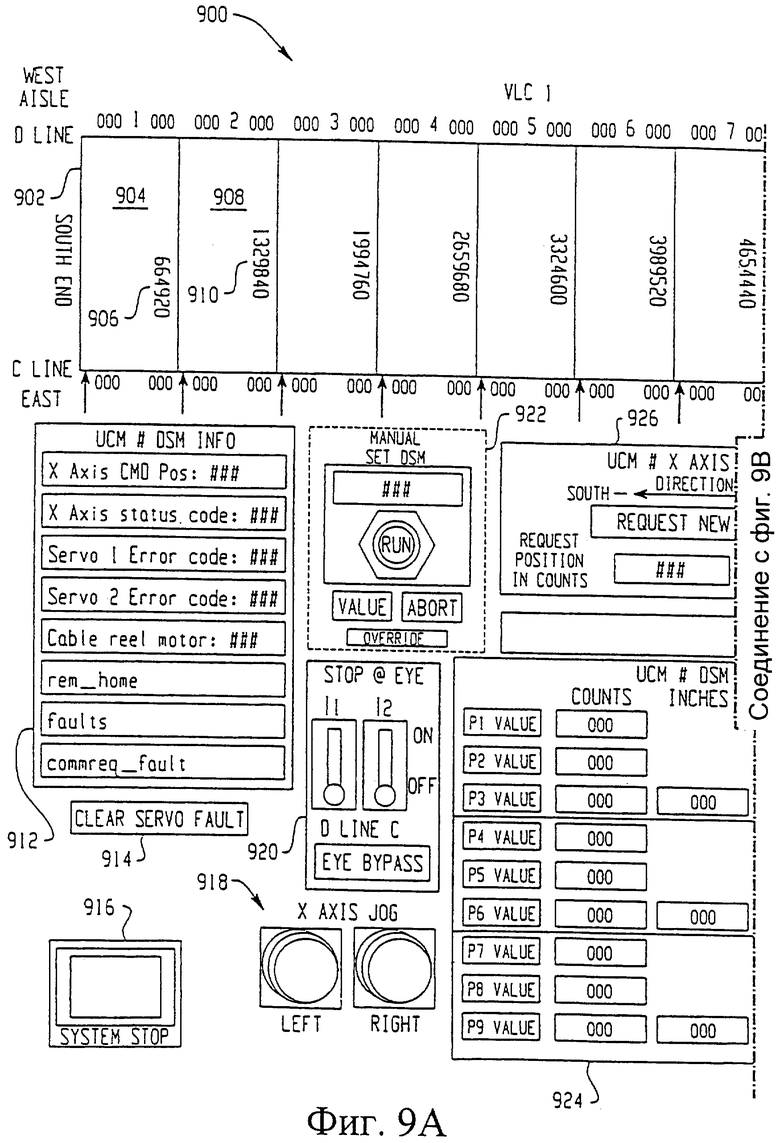
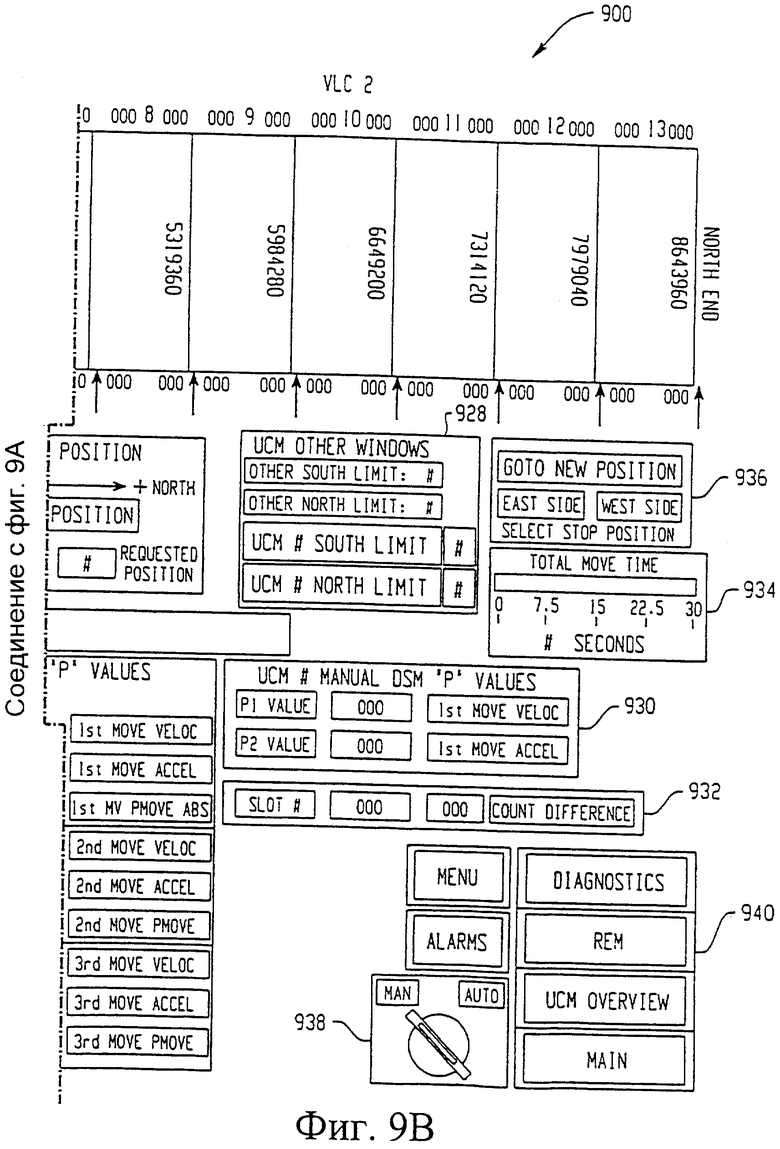
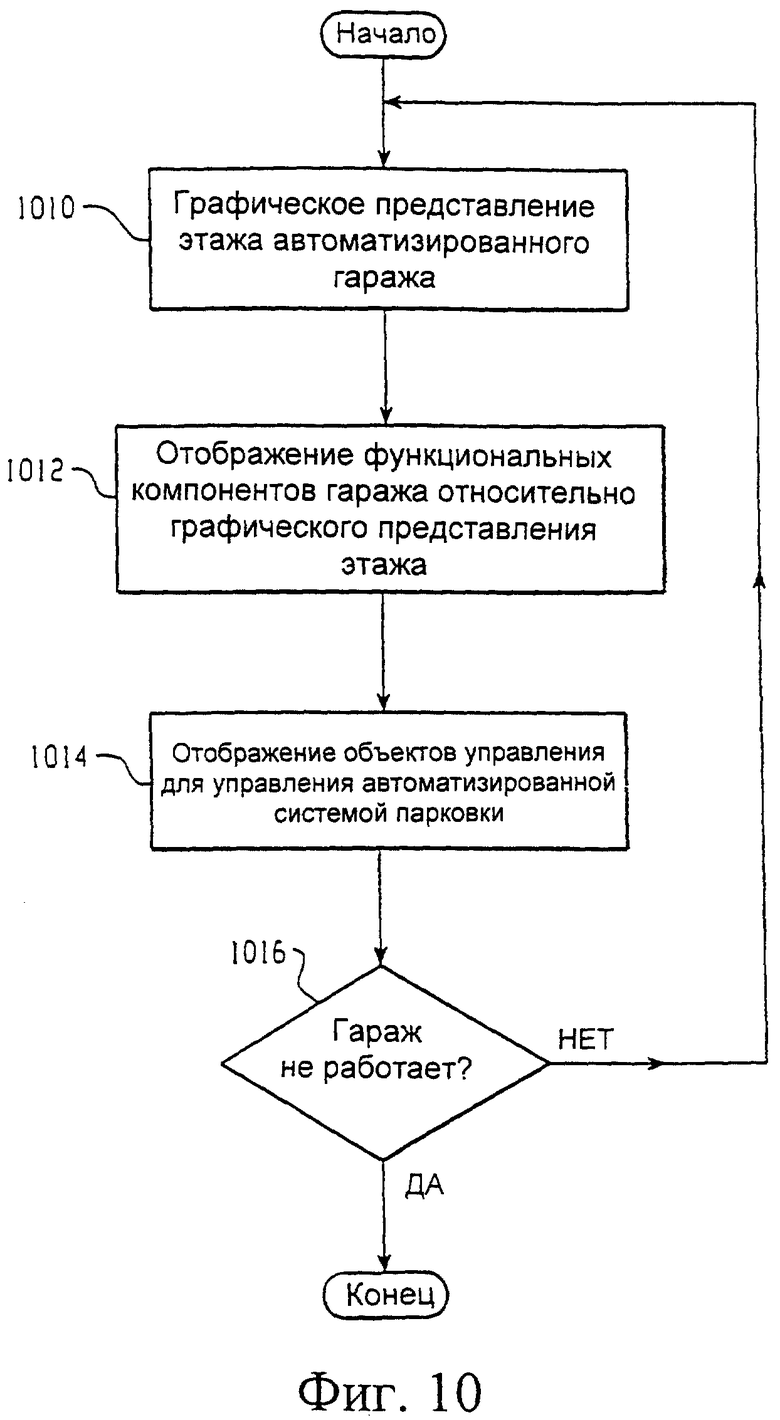
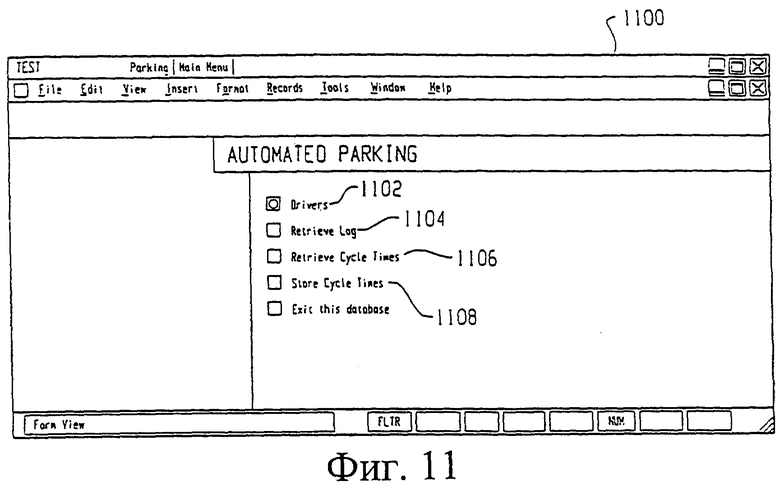
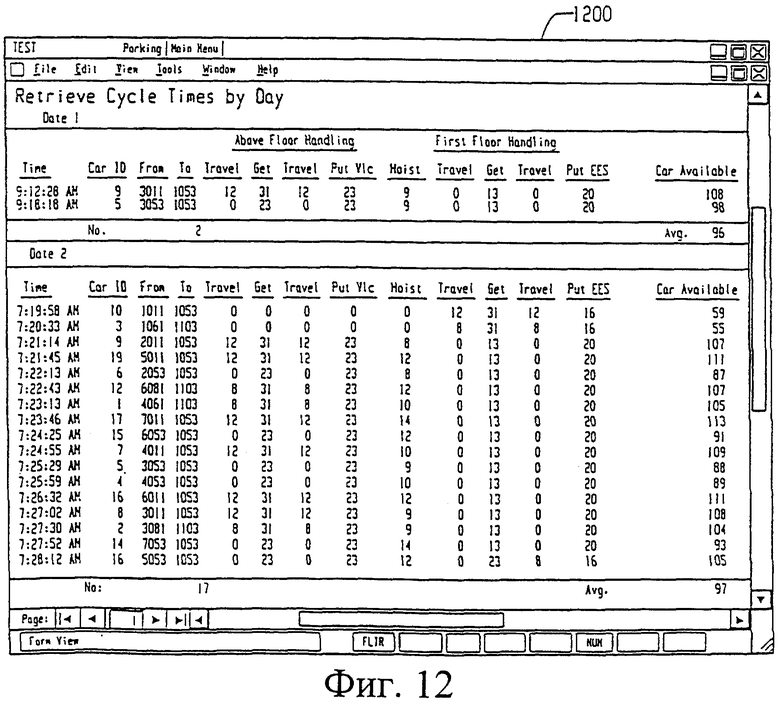
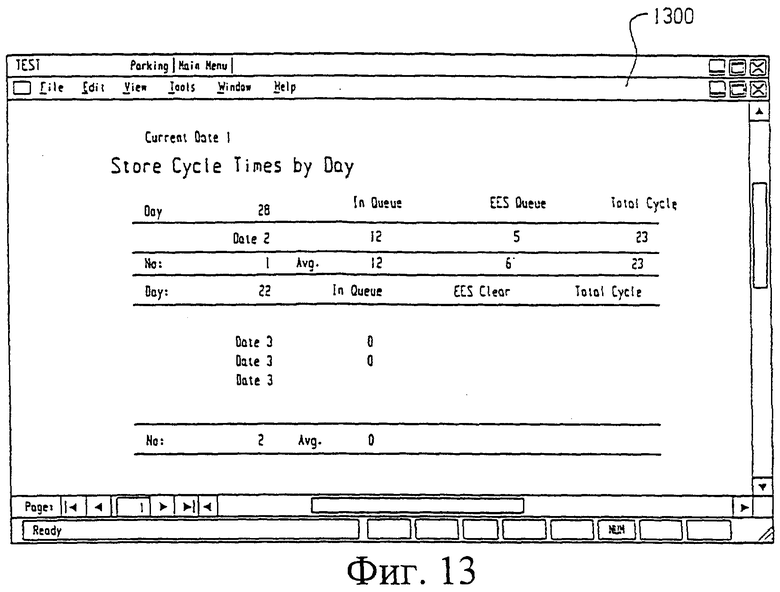
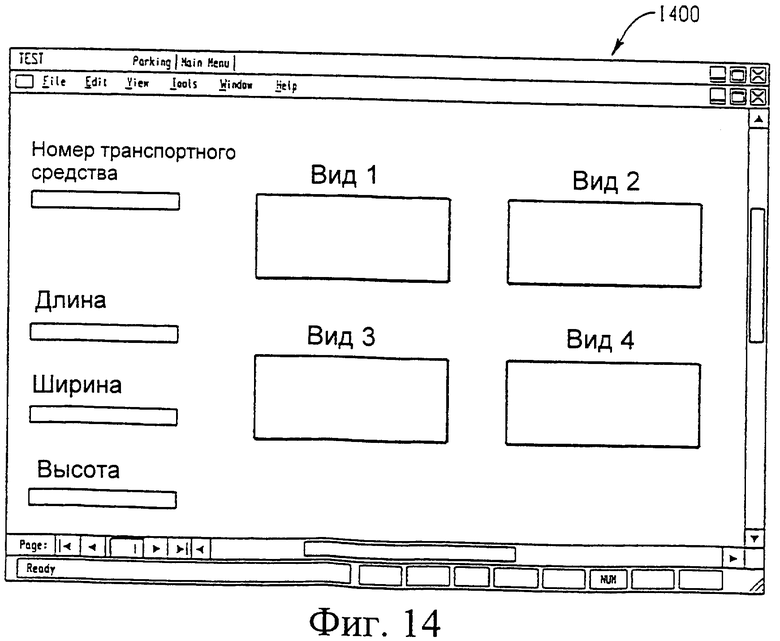
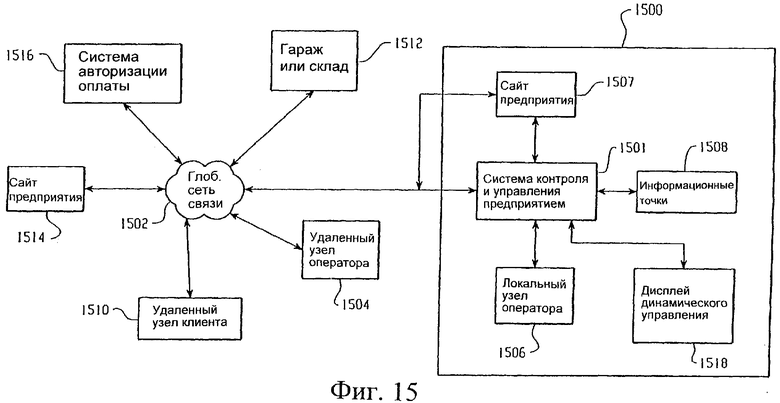
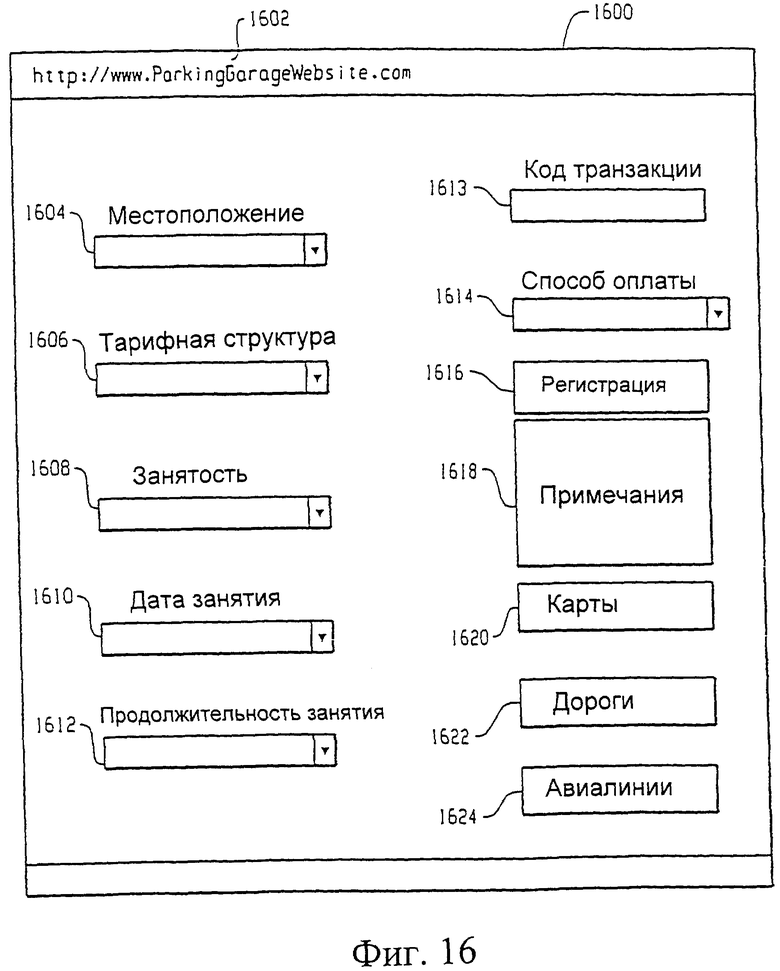
Настоящее изобретение относится к системам автоматизированной парковки и хранения, а более конкретно - к интерфейсу программного обеспечения для контроля, управления, функционирования и отображения информации для таких систем. Технический результат заключается в отображении информации и управлении отдельными компонентами автоматизированного предприятия парковки и хранения посредством графического интерфейса пользователя. Он достигается тем, что предложены способ и система управления автоматизированным предприятием парковки и хранения с использованием графического интерфейса пользователя. Система управления обеспечивает интерактивный интерфейс для доступа, контроля и управления предприятием парковки и хранения как локально, так и дистанционно, а также обеспечивает клиенту ограниченный локальный и дистанционный доступ для получения им продукции и услуг, предоставляемых предприятием. Для обеспечения взаимодействия с оператором интерфейс включает графические объекты, отображаемые относительно составных частей предприятия, например этажа предприятия, тем самым представляя состояние этого этажа, при этом графические объекты связаны с составными частями предприятия, что позволяет оператору осуществлять контроль, управление и диагностику. 2 н., 14 з.п. ф-лы, 16 ил.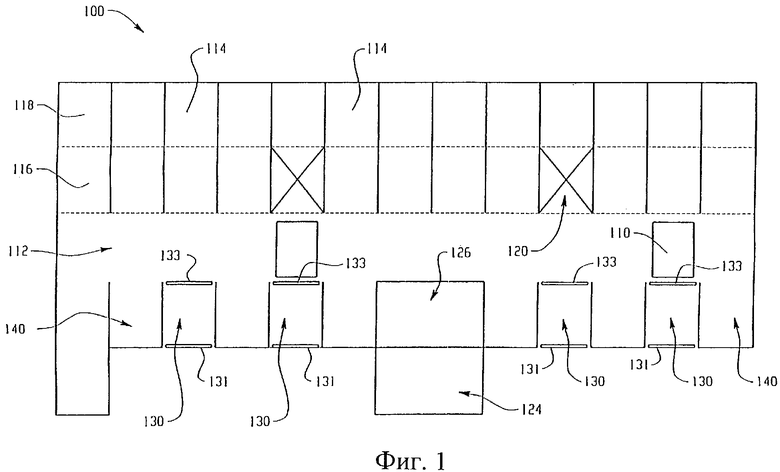
отображение графического представления этажа автоматизированного предприятия парковки и хранения,
отображение множества графических объектов, связанных с этим этажом, посредством чего отображается состояние этого этажа, при этом множество графических объектов включает отображение пункта входа/выхода, предназначенного для ввода транспортного средства или предмета в автоматизированное предприятие парковки и хранения и для вывода их из него, транспортного модуля для перемещения транспортного средства или предмета в пределах автоматизированного предприятия парковки и хранения и множества опор для хранения транспортных средств или предметов, и
получение доступа к информации, контроль и управление компонентами предприятия с использованием программного обеспечения системы управления, выполняемого посредством графического интерфейса пользователя центральным компьютером, так, чтобы позволить оператору контролировать работу автоматизированного предприятия парковки и хранения и управлять ею,
при этом указанное получение доступа к информации включает обращение к базе данных с данными о предприятии парковки и хранения с помощью экрана доступа к базе данных в графическом интерфейсе пользователя для просмотра по меньшей мере одного из следующего: информации о водителе, информации журнала извлечения, информации о циклах извлечения и информации о циклах помещения на хранение.
| US 20020018704 А1, 14.02.2002 | |||
| Автоматизированный многоэтажный гараждля АВТОМОбилЕй | 1979 |
|
SU842182A1 |
| СКЛАДСКОЙ КОМПЛЕКС | 1994 |
|
RU2094348C1 |
| Автоматизированный склад | 1980 |
|
SU992344A1 |

