Изобретение относится к области автоматизированных систем контроля и управления движением транспортных средств (ТС) и может быть использовано для централизованного контроля за ними, прежде всего за их техническим и эксплуатационным состоянием, соблюдением графика движения по маршруту следования и выполнения правил дорожного движения, а также соблюдения ими весовых и габаритных параметров перевозимого груза.
Известна система контроля эксплуатации транспортных средств [патент RU 2257616, 2005], включающая в себя пункт контроля эксплуатации транспортных средств (ТС), снабженный радиоприемником с антенной и компьютером. По меньшей мере, на одном транспортном средстве установлены приемник навигационных радиосигналов с антенной, формирователь сообщений, радиопередатчик с антенной, запоминающее устройство. Кроме того, система снабжена блоком обращения к базе данных дорожной сети, блоком хранения базы данных дорожной сети, блоком обращения к базе данных действующих ограничений на движение ТС, блоком хранения базы данных действующих ограничений на движение ТС, блоком сравнения технических характеристик и параметров движения ТС с действующими ограничениями.
Недостатком этой системы является принципиальная невозможность оперативного реагирования контролирующих органов, на территории которых произошло нарушение (УГИБДД, Управление Государственного автодорожного надзора (Транспортная инспекция РФ), Таможенные органы и налоговые органы и т.п.), по принятию своевременных соответствующих мер, связанных с своевременным информированием этих органов о допущенном нарушении и, как следствие, принятия решения об оперативном возмещении ущерба за допущенные нарушения (наложение соответствующего штрафа, изъятие водительского удостоверения, отстранения от управления транспортным средством, изъятие груза и его складирование в пункте временного хранения и т.п.). Такое положение происходит из-за действующего законодательства, поскольку эти меры согласно действующим Законодательным актам (Кодекс об административных нарушениях, нормативных и распорядительных документов Министерств и ведомств и т.п.) разрешено принимать только тем сотрудникам вышеуказанных органов, на территории которых (области, районе, населенном пункте) было совершено данное правонарушение.
Недостатком этой системы является только регистрация в пункте контроля эксплуатации транспортных средств нарушений, допущенных водителем транспортного средства при транспортировке грузов (пассажиров), и невозможность своевременно реагировать на выявленные нарушения, а тем более возместить причиненный действиями водителя и перевозчика ущерб.
Кроме этого система не позволяет контролировать и фиксировать совокупность параметров автотранспортного средства, определяющим образом влияющих на его эксплуатацию при нахождении на маршруте следования и характеризующих его эксплуатационное, техническое и экономическое состояние (температуру двигателя, число его оборотов, давление масла в двигателе, уровень топлива в баках, число заправок, расход топлива на единицу пути и другие параметры). Также эта система имеет сложное построение из-за использования в ней элементов, созданных на основе различных технологий изготовления.
Среди устройств контроля движения транспортного средства по маршруту известно устройство контроля маршрута автомобиля [патент RU 2194308, 2002], которое содержит антенну, приемоизмеритель координат, модуль обработки информации, накопитель, сигнальный элемент, два оперативно-запоминающих устройства, постоянно запоминающее устройство, анализатор, генератор тактовых импульсов, индикатор, два ключа, формирователь управляющих сигналов, вычитатель, таймер, элемент сравнения, датчик пути и два элемента блокировки зажигания и устройство для записи информации о маршруте движения.
Недостатком указанного устройства является низкий уровень автоматизации контроля эксплуатации транспортного средства, что связано с необходимостью его установки на транспортном средстве, снятия с него и передачу в контролирующий орган для проверки энергонезависимого запоминающего устройства по определенным правилам и процедурам.
Кроме того, с помощью этого устройства невозможно осуществить контроль за выполнением водителем транспортного средства правил дорожного движения и перевозки грузов, регистрацию допущенных на маршруте следования нарушений, а также своевременного информирования соответствующих контролирующих территориальных органов о допущенных нарушениях и их реагирования по определению причиненного ущерба и принятию оперативных мер по его возмещению за допущенные нарушения выше названных правил.
Известна система диспетчерского управления наземным транспортом [патент RU 2113013, 1998], содержащая центральный диспетчерский пункт (ЦДП), подвижные единицы (ПЕ) и контрольные пункты (КП), на каждом из которых установлены приемопередатчики ближнего и дальнего радиоканалов и микроконтроллер, на центральном диспетчерском пункте установлены двухканальный приемопередатчик, адаптер каналов связи, цифроаналоговый преобразователь, блок ввода-вывода речи и аналого-цифровой преобразователь, а также объединенные в локальную вычислительную сеть с адаптером каналов связи файл-сервер и автоматизированные рабочие места диспетчеров и вспомогательного персонала, на подвижной единице установлены двухканальный приемопередатчик, блок управления, цифроаналоговый преобразователь, аналого-цифровой преобразователь, блок ввода-вывода речи и пульт управления и индикации.
Недостатком этой системы является невозможность контролировать технические и эксплуатационные параметры транспортного средства, а также его местоположение вне зоны действия приемопередающих средств системы. Кроме этого система не обеспечивает контроль за выполнением водителями контролируемых транспортных средств правил дорожного движения и перевозки грузов и регистрацию возможных нарушений, а также своевременное информирование соответствующих территориальных органов, в зоне ответственности которых были допущены нарушения, с целью их реагирования и принятия соответствующих оперативных мер по возмещению ущерба за допущенные нарушения выше названных правил.
Известна система диспетчерского управления наземным транспортом [патент RU 2113014, 1998], включающая маршрутные датчики, центральный диспетчерский пункт с приемопередатчиком и подвижные единицы, контрольные пункты, на каждом из которых установлены приемопередатчики ближнего и дальнего радиоканалов, соединенные с микроконтроллером, на центральном диспетчерском пункте введены адаптер каналов связи, цифроаналоговый преобразователь, блок ввода-вывода речи и аналого-цифровой преобразователь, а также объединенные в локальную вычислительную сеть с адаптером каналов связи файл-сервер и автоматизированные рабочие места диспетчеров и вспомогательного персонала, причем блок управления на подвижной единице выполнен на микроконтроллере.
Недостатками указанной системы являются невозможность контролировать и фиксировать совокупность параметров автотранспортного средства, находящегося на маршруте, характеризующих его эксплуатационное состояние (скорость движения на маршруте, температура двигателя, число его оборотов, давление масла, число перевозимых пассажиров, уровень топлива в баках, время стоянок, пробег на участке и т.д.), а также сложность ее построения вследствие использования различных элементов, созданных на основе разных технологий изготовления.
Кроме этого система не позволяет определить местонахождение автотранспортного средства вне зоны действия маршрутных датчиков. Она не обеспечивает контроль за выполнением водителями транспортных средств правил дорожного движения, перевозки грузов и регистрацию их нарушений, а также своевременное информирование территориальных контролирующих органов о допущенных нарушениях и их своевременного реагирования по принятию оперативных мер по возмещению ущерба за допущенные нарушения выше названных правил.
Наиболее близкой по технической сущности, выбранной в качестве прототипа, является автоматизированная система контроля технического состояния и мониторинга автотранспортных средств и регистратор параметров транспортного средства [патент RU 53049, 2005], состоящая из базовой станции (БС), подвижных единиц (ПЕ), центрального диспетчерского пункта (ЦДП) и маршрутных датчиков (МД), причем на базовой станции установлены первое и второе приемопередающие устройства, соединенные своими выходами по шине портов ввода-вывода с соответствующими входами микроконтроллера базовой станции, выполненного с возможностью генерировать команды настройки и опроса подвижной единицы и соединенного своим выходом через соответствующий порт ввода-вывода с первой ПЭВМ, выполненной с возможностью расчета значений показателей и отображения информации о результатах работы подвижной единицы на автоматизированных рабочих местах базовой станции, подключенных своими входами к соответствующему порту ввода-вывода первой ПЭВМ, на каждой подвижной единице установлен блок датчиков ее технического и эксплуатационного состояния, соединенных своими выходами с входами блока обработки информации, входящего в состав регистратора параметров транспортного средства, а своим выходом блок обработки информации соединен по соответствующей шине ввода-вывода с входом приемопередающего устройства регистратора, который также входит в состав регистратора параметров транспортного средства, выполненного с возможностью фиксации, хранения и адаптации информации контроля к форматам и протоколам обмена в локальной вычислительной сети и ее передачи через приемопередающее устройство регистратора в микроконтроллер базовой станции, центральный диспетчерский пункт содержит третье приемопередающее устройство, выход которого подключен через соответствующую шину порта ввода-вывода к второй ПЭВМ, выполненной с возможностью обобщать и анализировать информацию микроконтроллера базовой станции по граничным значениям контролируемых параметров регистратора параметров транспортного средства и соединенной через соответствующую шину порта ввода-вывода с автоматизированными рабочими местами центрального диспетчерского пункта, маршрутные датчики имеют в своем составе передающие устройства, выполненные с возможностью генерации сигналов, фиксирующих факт прохождения мимо них подвижных единиц, объединение в единую автоматизированную систему осуществляется радиоканалами между подвижной единицей и базовой станцией первым приемопередающим устройством и приемопередающим устройством регистратора, между базовой станцией и центральным диспетчерским пунктом вторым и третьим приемопередающими устройствами и между подвижной единицей и маршрутными датчиками приемопередающим устройством регистратора и передающим устройством маршрутного датчика.
Недостатком этой системы является принципиальная невозможность контролировать технические и эксплуатационные параметры транспортного средства и определения его местонахождения на маршруте следования, находящегося вне зоны действия маршрутных датчиков, а также фиксировать возможные нарушения правил дорожного движения и перевозок грузов (пассажиров), его фактические весовые и габаритные параметры (число пассажиров и др.). Система не обеспечивает своевременное информирование соответствующих территориальных контролирующих органов о допущенных нарушениях и их оперативное реагирование по определению нанесенного ущерба и расчета суммы возмещения за допущенные нарушения (экономические санкции: штрафы, и административные меры: лишение права управлять транспортным средством и т.п.), а также оперативность по принятию мер для возмещения ущерба за допущенные нарушения выше названных правил.
Известно устройство для определения эксплуатационных параметров транспортных средств [патент RU 2107946, 1998], содержащее датчик оборотов коленчатого вала двигателя, датчик пути, первичные преобразователи, детекторы, делители, генератор временных импульсов, инвертор, четыре элемента И, счетчики времени, оборотов коленчатого вала двигателя в движении и на месте, пройденного пути, а также программируемый интерфейс, содержащий блок управления приемопередатчиком, регистр адреса, дешифратор адреса, ключи, приемопередатчик, блоки согласования уровней сигналов и блок идентификации транспортного средства, соединенные между собой соответствующим образом, что позволяет частично автоматизировать процесс управления эксплуатацией транспортных средств и постоянно осуществлять контроль использования мобильных объектов по назначению.
Недостатками данного устройства являются его конструктивная сложность и, как следствие этого, недостаточная надежность в эксплуатации. Кроме этого оно не позволяет полностью автоматизировать процесс получения информации об эксплуатации транспортных средств и производить регистрацию эксплуатационных показателей в полном объеме, поскольку не обладает возможностью автоматизированной передачи информации о значениях технических и эксплуатационных параметров транспортного средства в АСУ предприятия. Также в случае появления необходимости контролировать дополнительные параметры в устройство необходимо добавить новые датчики, а оно само должно претерпеть схемные изменения по причине их включения в общую структуру.
Известно устройство для контроля и регистрации эксплуатационных показателей автотранспортного средства [патент RU 2178585, 2002], содержащее датчик пройденного пути, командный блок, пять дешифраторов, задатчик вида дорожного покрытия, датчик расхода топлива, генератор времени, суммарный счетчик расхода топлива, счетчик общего времени пробега, счетчики пройденного пути, счетчики расхода топлива, счетчики времени движения, счетчики скорости, счетчики включений спецоборудования, датчик скорости, датчик включения спецоборудования, приемную антенну, приемник GPS-сигналов, микропроцессор, которое может быть использовано при испытании, эксплуатации, статистическом анализе эксплуатационных показателей автотранспортного средства и позволяющее осуществлять объективный контроль за эксплуатацией автотранспортных средств и спецоборудования согласно путевым листам и производственным заданиям, а также обеспечить фиксацию в реальном времени местоположения, стоянок, маршрутов движения автотранспортных средств, периодов времени использования спецоборудования с привязкой к месту (адресу) и времени использования, длительности работы двигателей как собственно автотранспортных средств, так и двигателей автономного спецоборудования.
Недостатком указанного устройства является отсутствие высокой степени его автоматизации и оперативности контроля, что связано с необходимостью установки на транспортном средстве запоминающего устройства, его снятия и передачи в контролирующий орган для проверки и контроля информации. Кроме этого оно не обеспечивает контроль за выполнением водителями контролируемых транспортных средств правил дорожного движения и перевозки грузов и регистрацию их нарушения, а также своевременного реагирования соответствующих органов для оперативного принятия мер по возмещению ущерба за допущенные нарушения выше названных правил.
Известен регистратор параметров транспортного средства [патент 53049, 2005], принятый в качестве прототипа и состоящий из приемопередающего устройства регистратора, вход которого соединен шиной ввода-вывода с выходом блока обработки информации, содержащего блок согласования и настройки, микропроцессор, выполненный с возможностью фиксации, хранения и адаптации информации контроля к форматам и протоколам обмена в локальной вычислительной сети и ее передачи через приемопередающее устройство регистратора, блока памяти, блока времени, причем блок согласования и настройки подключен шиной ввода-вывода к соответствующему порту микропроцессора, а блок времени и блок памяти соединены соответствующими шинами ввода-вывода с портами микропроцессора, при этом входами блока обработки информации являются входы блока согласования и настройки.
Недостатком этого регистратора является его принципиальная невозможность контролировать и регистрировать допущенные водителем транспортного средства нарушения правил дорожного движения и перевозки грузов, а также определение его местоположения вне зоны действия маршрутных датчиков.
Задача, положенная в основу предлагаемого изобретения, заключается в получении органами управления и контроля объективной, адекватной и оперативной информации о техническом и эксплуатационном состоянии автотранспортных средств, о местах (координатах) нахождения их на маршруте следования, о режимах их работы и соблюдения ими на маршруте следования правил дорожного движения и перевозки грузов, а также своевременной передаче информации о допущенных нарушениях и обеспечении определения соответствующих штрафных санкций для возмещения причиненного при этом ущерба с последующим предъявлением их водителю транспортного средства, кроме этого запоминания и хранения в криптографической форме информации о совершенных рейсах и перевозимых грузах и ее предоставлении в соответствующие контролирующие органы.
Поставленная задача достигается аппаратно-программными средствами автоматизированной системы, объединенными единым алгоритмом функционирования системы и форматами передаваемой информации.
Технический результат использования автоматизированной системы контроля эксплуатации транспортных средств заключается в обеспечении
- расширения функций автоматизированного контроля в реальном масштабе времени за счет:
а) определения координат подвижной единицы на маршруте следования, определенных с помощью навигационной системы GPS/ГЛОНАСС;
б) фиксации допущенных подвижной единицей нарушений правил дорожного движения и перевозки грузов за счет введения в состав подвижной единицы регистратора параметров транспортного средства, контролирующего значения указанной выше информации с заданной блоком времени дискретой и накапливающего эти значения в блоке запоминающих устройств на протяжении всего времени нахождения транспортного средства на маршруте следования;
в) организации в регистраторе параметров транспортного средства информационного архива в криптографической форме о проведении им рейсов и перевозимом в них грузе (данные путевого листа и товарно-транспортной накладной) за определенный период его эксплуатации (месяц, квартал, полугодие, год и т.п.);
- автоматизированной передачи соответствующих массивов данных о техническом и эксплуатационном состоянии автотранспортного средства, координатах его нахождения на маршруте и допущенных при этом нарушениях правил дорожного движения и перевозки грузов в пункты управления (базовые станции) и контроля (центральный диспетчерский пункт) посредством блока приемопередающих устройств регистратора параметров транспортного средства;
- своевременного автоматизированного информирования соответствующих территориальных органов (пунктов (постов) весового и габаритного контроля и пунктов (постов) контроля движения транспортных средств) о допущенных на маршруте следования нарушениях подвижной единицей правил дорожного движения и перевозки грузов;
- оперативного автоматизированного расчета в территориальных органах (пунктах (постах) весового и габаритного контроля и в пунктах (постах) контроля движения транспортных средств) сумм штрафных санкций по возмещению нанесенного подвижной единицей ущерба безопасности движения из-за нарушений ей правил дорожного движения и транспортировки грузов и предъявления их водителю;
- автоматизированного информирования управляющих (базовые станции) и контролирующий органов (центральный диспетчерский пункт) о допущенном подвижной единицей на маршруте следования нарушении правил дорожного движения и перевозки грузов, рассчитанных и назначенных за это штрафных санкций со стороны соответствующих территориальных органов (пункты (посты) весового и габаритного контроля и пункты (посты) контроля движения транспортных средств);
- автоматизированного сообщения в управляющий (базовая станция) и контролирующий органы (центральный диспетчерский пункт) о возникновении на подвижной единице нештатной (аварийной) ситуации.
Указанный технический результат достигается с помощью автоматизированной системы контроля эксплуатации транспортных средств и регистратора параметров транспортного средства для нее.
Автоматизированная система контроля эксплуатации транспортных средств, представленная на фиг.1, с регистратором параметров транспортного средства, представленного на фиг.2, состоит из базовой станции, подвижных единиц, центрального диспетчерского пункта, глобальной навигационной системы GPS, состоящей из соответствующей группировки спутников и центров управления (Global Positioning System), или ее Российского аналога ГЛОНАСС, пунктов (постов) весового и габаритного контроля, пунктов (постов) контроля движения транспортных средств, причем на базовой станции установлены первое и второе приемопередающие устройства, соединенные своими выходами по шине портов ввода-вывода с соответствующими входами микроконтроллера базовой станции, выполненного с возможностью генерировать команды настройки и опроса подвижной единицы через соответствующий канал дальней связи, а также определять координаты нахождения на маршруте подвижной единицы по информации, полученной от регистратора параметров транспортного средства посредством канала дальней связи, приемопередающего устройства дальней связи подвижной единицы и первого приемопередающего устройства базовой станции, и соединенного своим выходом через соответствующий порт ввода-вывода с первой ПЭВМ, выполненной с возможностью расчета значений эксплуатационных и технических показателей подвижной единицы, определения фактического маршрута ее следования с помощью информации, получаемой от микроконтроллера и ее отображения на автоматизированных рабочих местах базовой станции. Автоматизированные рабочие места подключены своими входами к соответствующему порту ввода-вывода первой ПЭВМ. На каждой подвижной единице установлен блок датчиков ее технического и эксплуатационного состояния (в котором хотя бы один датчик является датчиком об аварийном состоянии подвижной единицы и управляемый ее водителем), соединенный своим выходом с входами блока переработки информации, входящего в состав регистратора параметров транспортного средства, а своим выходом блок переработки информации соединен по соответствующей шине ввода-вывода с входами блока приемопередающих устройств, который также входит в состав регистратора параметров транспортного средства, выполненного с возможностью организации в криптографической форме информационного архива о проведении транспортным средством рейсов и перевозимом грузе (данные путевого листа и товарно-транспортной накладной) за определенный период его эксплуатации (месяц, квартал, полугодие, год и т.п.), расчета, фиксации и хранения навигационных параметров, получаемых по каналу навигационной связи через приемник навигационных сигналов, и информации контроля о технических и эксплуатационных параметрах подвижной единицы, получаемой от блока датчиков, сравнения ее с имеющимися ограничениями на участке маршрута следования, а также определения факта нарушения правил перевозки грузов и дорожного движения и адаптации хранимой информации к форматам и протоколам обмена в локальной вычислительной сети, и управления ее передачи через канал дальней связи посредством приемопередающего устройства дальней связи блока приемопередающих устройств регистратора параметров транспортного средства в микроконтроллер базовой станции с помощью приемопередающего устройства дальней связи и в пункт (пост) весового и габаритного контроля, и в пункт (пост) контроля движения транспортных средств о нарушениях правил перевозки грузов и дорожного движения с помощью приемопередающего устройства ближней связи по каналу ближней связи. Центральный диспетчерский пункт содержит третье приемопередающее устройство, выход которого подключен через соответствующую шину порта ввода-вывода к второй ПЭВМ, выполненной с возможностью обобщать и анализировать информацию микроконтроллера базовой станции по граничным значениям контролируемых параметров регистратора параметров транспортного средства, фиксировать маршрут подвижной единицы и допущенные водителем нарушения правил перевозки грузов и дорожного движения и предоставлять эту информацию соединенному через соответствующую шину порта ввода-вывода автоматизированному рабочему месту центрального диспетчерского пункта.
Кроме этого автоматизированная система контроля эксплуатации транспортных средств содержит пункт весового и габаритного контроля и пункт контроля движения транспортных средств, причем пункт весового и габаритного контроля содержит четвертое приемопередающее устройство, третью ПЭВМ, первый блок видеонаблюдения и регистрации, выполненного с возможностью по командам третьей ПЭВМ производить идентификацию транспортного средства, допустившего нарушение весовых или габаритных характеристик и соединенного по соответствующей шине ввода-вывода с третьей ПЭВМ, блок весового контроля и блок габаритного контроля, выполненные с возможностью определения фактического веса и габаритных размеров перевозимого груза, подключенные своими выходами по соответствующей шине ввода-вывода с входом третьей ПЭВМ, выполненной с возможностью анализировать и выделять из принимаемой информации от подвижной единицы зафиксированные в ее регистраторе параметров транспортного средства признаки допущенных на маршруте следования нарушений весовых и габаритных характеристик на территории, контролируемой пунктом весового и габаритного контроля, выдавать управляющие сигналы в первый блок видеонаблюдения и регистрации на поиск из общего потока транспортных средств той подвижной единицы, которая допустила нарушение массо-габаритных характеристик, зафиксированное в ее регистраторе параметров движения, а также на основе произведенных массо-габаритных измерений в покое и движении и времени произведенного измерения определять дату и время нарушений по перегрузке транспортируемого груза и его габаритных размеров, определять ущерб, наносимый дорожному полотну, осуществлять ведение и организацию электронного архива данных подвижных единиц, прошедших весовой и габаритный контроль, назначать стоимость проезда, выдавать чек кассового сбора, рассчитывать штрафы при превышении допустимых весовых и габаритных параметров, а также автоматически оформлять акты на допущенные автоперевозчиком нарушения, и после проведения контроля передавать по каналу ближней связи через четвертое приемопередающее устройство, подключенное своим выходом по соответствующей шине ввода-вывода со входом третьей ПЭВМ фактические данные о выявленных нарушениях и штрафных санкциях за них в регистратор параметров транспортного средства, третья ПЭВМ своим выходом соединена по шине ввода-вывода с входом автоматизированного рабочего места, выполненного с возможностью отображения результативной информации контроля весовых и габаритных параметров транспортных средств.
Пункт (пост) контроля движения транспортных средств содержит пятое приемопередающее устройство, второй блок видеонаблюдения и регистрации, четвертую ПЭВМ, причем второй блок видеонаблюдения и регистрации выполнен с возможностью по командам четвертой ПЭВМ производить идентификацию транспортного средства, допустившего нарушение правил дорожного движения на маршруте движения, и подключен своим выходом по соответствующей шине ввода-вывода с входом четвертой ПЭВМ, выполненной с возможностью анализировать и выделять из принимаемой информации от подвижной единицы зафиксированные в ее регистраторе параметров транспортного средства признаки допущенных на маршруте следования нарушений правил дорожного движения на территории, контролируемой данным пунктом контроля движения транспортных средств, выдавать управляющие сигналы во второй блок видеонаблюдения и регистрации на поиск из общего потока транспортных средств той подвижной единицы, которая допустила нарушение правил дорожного движения, зафиксированное в ее регистраторе параметров транспортного средства, а также зафиксировать дату, время проезда, допущенные при этом нарушения правил дорожного движения, осуществлять ведение и организацию электронного архива данных автотранспортных средств, прошедших контроль на данном пункте контроля движения транспортных средств этого участка маршрута, рассчитывать величину штрафа за допущенные нарушения правил дорожного движения, автоматически оформлять акты о допущенных водителем транспортного средства нарушениях правил дорожного движения, передавать по каналу ближней связи через пятое приемопередающее устройство, соединенное своим выходом по соответствующей шине ввода-вывода с входом четвертой ПЭВМ, данные о выявленных нарушениях и штрафных санкций за них в регистратор параметров транспортного средства, четвертая ПЭВМ своим выходом соединена по шине ввода-вывода с входом автоматизированного рабочего места пункта контроля движения транспортных средств, причем это автоматизированное рабочее место выполнено с возможностью отображения результативной информации контроля соблюдения правил дорожного движения транспортными средствами. Объединение в единую автоматизированную систему осуществляется соответствующими каналами связи «а», «б», «с», «д»: каналом навигационной связи «а» объединяются космический аппарат системы GPS/ГЛОНАСС и подвижная единица посредством приемника навигационных сигналов блока приемопередающих устройств регистратора параметров транспортного средства, каналом дальней связи «б» объединяются подвижная единица и базовая станция посредством первого приемопередающего устройства базовой станции и приемопередающего устройства дальней связи блока приемопередающих устройств регистратора параметров транспортного средства; каналом связи «д» объединяется базовая станция и центральный диспетчерский пункт, посредством второго приемопередающего устройства базовой станции и третьего приемопередающего устройств центрального диспетчерского пункта, каналом ближней связи «с» объединяются подвижная единица и пункт (пост) весового и габаритного контроля, посредством приемопередающего устройства ближней связи блока приемопередающих устройств регистратора параметров транспортного средства и четвертого приемопередающего устройства пункта (поста) весового и габаритного контроля, кроме этого каналом ближней связи «с» объединяются подвижная единица с пунктом (постом) контроля движения транспортных средств посредством приемопередающего устройства ближней связи блока приемопередающих устройств регистратора параметров транспортного средства и пятого приемопередающего устройства пункта (поста) контроля движения транспортных средств.
Организация каналов связи в заявляемом изобретении может быть осуществлена следующим образом:
- Для организации дальней связи «б» и связи «д» может быть использована спутниковая, Интернет, или SMS-связь, которая образована известными стандартными аппаратно-программными средствами.
- Для организации навигационной связи «а» может быть использован GPS-приемник, который декодирует и обрабатывает сигналы спутников систем GPS/ГЛОНАСС и тем самым осуществляет определение навигационных параметров: координат, скорости и курса подвижной единицы, и который сконструирован специально для мобильных приложений.
- Аппаратура организации ближней связи «с» имеет радиус действия около 500 м и организована стандартными средствам УКВ-связи. Это позволяет использовать передатчики малой мощности, что снижает себестоимость системы и обеспечивает соблюдение санитарных норм на радиоизлучения.
Для автоматизированной системы контроля эксплуатации транспортных средств создан регистратор параметров транспортного средства.
Техническим результатом использования регистратора параметров транспортного средства является обеспечение:
- автоматизации операций по получению информации контроля о техническом состоянии автотранспортного средства по заранее определенным параметрам с программируемой блоком времени дискретой моментов контроля, а также месте нахождения транспортного средства на маршруте следования с помощью навигационной системы GPS/ГЛОНАСС;
- автоматизированного накопления информации о режиме работы транспортного средства и правил перевозки грузов, о допущенных на маршруте следования нарушениях весовых, габаритных и иных правил дорожного движения в блоке запоминающих устройств и предоставления этих данных в различные контролирующие и административные органы;
- автоматизированного задания маршрута следования транспортного средства и ограничений, действующих на нем по правилам дорожного движения и перевозки грузов;
- автоматизированной передачи накопленной в блоке запоминающих устройств информации соответствующими приемопередающими устройствами регистратора параметров транспортного средства на базовую станцию, на пункт (пост) весового и габаритного контроля информации о допущенных нарушениях правил перевозки грузов на конкретном участке маршрута следования и на пункт (пост) контроля движения транспортных средств о допущенных нарушениях правил дорожного движения на конкретном участке маршрута движения;
- автоматизированной передачи информационного сообщения в управляющие и контролирующие органы автоматизированной системы контроля эксплуатации транспортных средств (базовая станция и центральный диспетчерский пункт) о возникновении нештатной (аварийной) ситуации на подвижной единице;
- автоматизированной организации в криптографической форме информационного архива о проведении транспортным средством каждого рейса и перевозимом в нем грузе (данные путевого листа и товарно-транспортной накладной) за определенный период его эксплуатации (месяц, квартал, полугодие, год и т.п.).
Указанный технический результат достигается за счет регистратора параметров транспортного средства, входящего в состав автоматизированной системы контроля эксплуатации транспортных средств, а именно в подвижные единицы, и состоящего из блока приемопередающих устройств регистратора, включающего приемник навигационных сигналов, приемопередающее устройство дальней связи и приемопередающее устройство ближней связи, и соединенного шиной ввода-вывода с выходом блока переработки информации, содержащего блок согласования и настройки, микропроцессор, выполненный с возможностью организации в криптографической форме информационного архива о проведении транспортным средством рейсов и перевозимом грузе (данные путевого листа и товарно-транспортной накладной) за определенный период его эксплуатации (месяц, квартал, полугодие, год и т.п.), расчета, фиксации и хранения навигационных параметров нахождения подвижной единицы на маршруте следования и информации контроля технических и эксплуатационных параметров подвижной единицы, сравнения ее с имеющимися ограничениями на участке маршрута следования, определения факта нарушения правил перевозки грузов и дорожного движения и адаптации хранимой информации к форматам и протоколам обмена в локальной вычислительной сети и управлением ее передачей через блок приемопередающих устройств регистратора параметров транспортного средства, блок запоминающих устройств, состоящий из блока памяти и блока задания условий и контроля рейса, выполненных с возможностью хранения информационного архива криптографической информации о проведении транспортным средством рейсов и перевозимом грузе (данные путевого листа и товарно-транспортной накладной) за определенный период его эксплуатации (месяц, квартал, полугодие, год и т.п.), а также информации о значениях контролируемых технических и эксплуатационных параметрах подвижной единицы и ограничениях, накладываемых на правила дорожного движения и перевозки грузов на участках маршрута следования соответственно, а также информационного архива криптографической информации о проведении транспортным средством рейсов и перевозимом грузе (данные путевого листа и товарно-транспортной накладной) за определенный период его эксплуатации (месяц, квартал, полугодие, год и т.п.), блока времени, выполненного с возможностью формирования временных дискрет контроля технических и эксплуатационных параметров подвижной единицы и определения ее навигационных параметров, причем блок согласования и настройки подключен шиной ввода-вывода к соответствующему порту микропроцессора, а блок времени и блок запоминающих устройств соединены соответствующими шинами ввода-вывода с портами микропроцессора, при этом входами блока переработки информации являются входы блока согласования и настройки.
Таким образом, перечисленная совокупность признаков по сравнению с аналогами позволяет расширить функциональные возможности системы и регистратора параметров транспортного средства, повысить качество управления транспортными средствами и обеспечить контроль за соблюдением правил перевозки грузов и дорожного движения со стороны водителя транспортного средства и автоперевозчика, а также своевременно реагировать соответствующим органам для оперативного принятия мер по возмещению причиненного ущерба за допущенные нарушения вышеуказанных правил.
Анализ известных технических решений позволяет сделать вывод о том, что заявляемое техническое решение не известно из уровня техники, что свидетельствует о его соответствии критерию "новизна".
Возможность использования заявляемой полезной модели в системе диспетчерского управления автомобильным транспортом позволяет сделать вывод о его соответствии критерию "промышленная применимость".
На фиг.1 представлена структурная схема автоматизированной системы контроля эксплуатации транспортных средств, на фиг.2 представлена структурная схема регистратора параметров транспортного средства, на фиг.3 приведен алгоритм работы микроконтроллера базовой станции, на фиг.4 приведен алгоритм работы первой ПЭВМ базовой станции и второй ПЭВМ центрального диспетчерского пункта, на фиг.5 приведен алгоритм работы третьей ПЭВМ пункта (поста) весового и габаритного контроля, на фиг.6 приведен алгоритм работы четвертой ПЭВМ пункта (поста) контроля движения транспортных средств, на фиг.7 приведен алгоритм работы регистратора параметров транспортного средства, на фиг.8 приведена экранная форма выходного документа на автоматизированном рабочем месте базовой станции контроля движения транспортного средства на маршруте следования, на фиг.9 приведена экранная форма выходного документа на автоматизированном рабочем месте базовой станции в точке контроля параметров транспортного средства на маршруте следования.
Автоматизированная система контроля эксплуатации транспортных средств, представленная на фиг.1, с регистратором параметров транспортного средства (РПТС), представленного на фиг.2, состоит из базовой станции (БС) 1, подвижных единиц (ПЕ) 2, центрального диспетчерского пункта (ЦДП) 3, глобальной навигационной системы GPS/ГЛОНАСС, состоящей из соответствующей группировки спутников и центров управления (Global Positioning System) 4, или ее Российского аналога ГЛОНАСС, пунктов (постов) весового и габаритного контроля (ПВГК) 5, пунктов (постов) контроля движения транспортных средств (ПКДТС) 6, причем на базовой станции (БС) 1 установлены первое 7 и второе 8 приемопередающие устройства (ППУ), соединенные своими выходами по шине портов ввода-вывода с соответствующими входами микроконтроллера (МК) 9 базовой станции (БС) 1, выполненного с возможностью генерировать команды настройки и опроса подвижной единицы (ПЕ) 2 через соответствующий канал дальней связи «б» и соединенного своим выходом через соответствующий порт ввода-вывода с первой ПЭВМ 10, выполненной с возможностью расчета значений эксплуатационных и технических показателей подвижной единицы (ПЕ) 2, определения фактических координат места ее нахождения на маршруте следования с помощью навигационной системы GPS/ГЛОНАСС 4 и отображения информации о результатах работы подвижной единицы (ПЕ) 2 на автоматизированных рабочих местах (АРМ) 11 базовой станции (БС) 1. Автоматизированные рабочие места (АРМ) 11 подключены своими входами к соответствующему порту ввода-вывода первой ПЭВМ 10. На каждой подвижной единице (ПЕ) 2 установлен блок датчиков (БД) 12 ее технического и эксплуатационного состояния (в котором хотя бы один датчик является датчиком об аварийном состоянии подвижной единицы (ПЕ) и управляемый ее водителем), соединенный своим выходом с входами блока переработки информации (БПИ) 13, входящего в состав регистратора параметров транспортного средства (РПТС) 14, а своим выходом блок переработки информации (БПИ) 13 соединен по соответствующей шине ввода-вывода с входами блока приемопередающих устройств (БППУ) 15, который также входит в состав регистратора параметров транспортного средства (РПТС) 14, выполненного с возможностью организации в криптографической форме информационного архива о проведении транспортным средством рейсов и перевозимом грузе (данные путевого листа и товарно-транспортной накладной) за определенный период его эксплуатации (месяц, квартал, полугодие, год и т.п.), расчета, фиксации и хранения навигационных параметров, получаемых по каналу навигационной связи «а» посредством приемника навигационных сигналов (ПНС) 151, и информации контроля о технических и эксплуатационных параметрах подвижной единицы (ПЕ) 2, получаемых от блока датчиков (БД) 12, сравнения ее с имеющимися ограничениями на участке маршрута следования, определения факта нарушения правил перевозки грузов и дорожного движения и адаптации хранимой информации к форматам и протоколам обмена в локальной вычислительной сети и ее передачи по каналу дальней связи через соответствующие приемопередающие устройство дальней связи (ППУДС) 152 в микроконтроллер (МК) 9 базовой станции (БС) 1 и о нарушениях правил перевозки грузов и дорожного движения по каналу ближней связи «с» с помощью приемопередающего устройства ближней связи (ППУБС) 153 в пункт (пост) весового и габаритного контроля (ПВГК) 5 и в пункт (пост) контроля движения транспортных средств (ПКДТС) 6. Центральный диспетчерский пункт (ЦДП) 3 содержит третье приемопередающее устройство (ППУ) 16, выход которого подключен через соответствующую шину порта ввода-вывода к второй ПЭВМ 17, выполненной с возможностью получать через третье приемопередающее устройство и канал связи «д» информацию от базовой станции (БС) 1, обобщать ее и анализировать по граничным значениям контролируемых параметров регистратора параметров транспортного средства (РПТС) 14, фиксировать координаты маршрута подвижной единицы (ПЕ) 2 и допущенные водителем нарушения правил перевозки грузов и дорожного движения и предоставлять эту информацию соединенному через соответствующую шину порта ввода-вывода автоматизированному рабочему месту (АРМ) 18 центрального диспетчерского пункта (ЦДП) 3.
Пункт (пост) весового и габаритного контроля (ПВГК) 5 содержит четвертое приемопередающее устройство (ППУ) 19, соединенное по соответствующей шине ввода-вывода с входом третьей ПЭВМ, первый блок видеонаблюдения и регистрации (БВиР) 21, соединенного по соответствующей шине ввода-вывода с входом третьей ПЭВМ и выполненного с возможностью по командам третьей ПЭВМ 20 производить идентификацию транспортного средства, допустившего нарушение весовых или габаритных характеристик, блок весового контроля (БВК) 22 и блок габаритного контроля (БГК) 23, выполненные с возможностью определения фактического веса и габаритных размеров перевозимого груза, подключенные своими выходами по соответствующей шине ввода-вывода с входом третьей ПЭВМ 20, выполненной с возможностью анализировать и выделять из принимаемой информации от подвижной единицы (ПЕ) 2 зафиксированные в ее регистраторе параметров транспортного средства (РПТС) 14 признаки допущенных на маршруте следования нарушений весовых и габаритных характеристик на территории, контролируемой пунктом весового и габаритного контроля (ПВГК) 5, выдавать управляющие сигналы в первый блок видеонаблюдения и регистрации (БВ и Р) 21 на поиск из общего потока транспортных средств той подвижной единицы (ПЕ) 2, которая допустила нарушение массо-габаритных характеристик, зафиксированное в ее регистраторе параметров движения (РПТС) 14, а также на основе произведенных массо-габаритных измерений в покое и движении и времени произведенного измерения определять дату и время нарушений по перегрузке транспортируемого груза и его габаритных размеров, определять ущерб, наносимый дорожному полотну, осуществлять ведение и организацию электронного архива данных подвижных единиц (ПЕ) 2, прошедших весовой и габаритный контроль, назначать стоимость проезда, выдавать чек кассового сбора, рассчитывать штрафы при превышении допустимых весовых и габаритных параметров, а также автоматически оформлять акты на допущенные автоперевозчиком нарушения, и после проведения контроля передавать по каналу ближней связи «с» через четвертое приемопередающее устройство (ППУ) 19 фактические данные о выявленных нарушениях и штрафных санкциях за них в регистратор параметров транспортного средства (РПТС) 14, третья ПЭВМ 20 своим выходом соединена по шине ввода-вывода с входом автоматизированного рабочего места (АРМ) 24, выполненного с возможностью отображения результативной информации контроля весовых и габаритных параметров транспортных средств.
Пункт (пост) контроля движения транспортных средств (ПКДТС) 6 содержит пятое приемопередающее устройство (ППУ) 25, второй блок видеонаблюдения и регистрации (БВ и Р) 26, выполненный с возможностью по командам четвертой ПЭВМ 27 производить идентификацию транспортного средства, допустившего нарушение правил дорожного движения на маршруте движения и подключенные своими выходами по соответствующей шине ввода-вывода с входом четвертой ПЭВМ 27, выполненной с возможностью анализировать и выделять из принимаемой информации от подвижной единицы (ПЕ) 2 зафиксированные в ее регистраторе параметров транспортного средства (РПТС) 14 признаки допущенных на маршруте следования нарушений правил дорожного движения на территории, контролируемой данным пунктом (постом) контроля движения транспортных средств (ПКДТС) 6, выдавать управляющие сигналы во второй блок видеонаблюдения и регистрации (БВ и Р) 26 на поиск из общего потока транспортных средств той подвижной единицы (ПЕ) 2, которая допустила нарушение правил дорожного движения, зафиксированное в ее регистраторе параметров движения (РПТС) 14, а также зафиксировать дату, время проезда, допущенные при этом нарушения правил дорожного движения, осуществлять ведение и организацию электронного архива данных автотранспортных средств, прошедших контроль на данном пункте (посте) контроля движения транспортных средств (ПКДТС) 6 этого участка маршрута, рассчитывать величину штрафа за допущенные нарушения правил дорожного движения, автоматически оформлять акты о допущенных водителем транспортного средства нарушениях правил дорожного движения, передать по каналу ближней связи «с» через пятое приемопередающее устройство (ППУ) 25 данные о выявленных нарушениях и штрафных санкций за них в регистратор параметров транспортного средства (РПТС) 14, четвертая ПЭВМ 27 своим выходом соединена по шине ввода-вывода с входом автоматизированного рабочего места 28 пункта (поста) контроля движения транспортных средств (ПКДТС) 6, выполненного с возможностью отображения результативной информации контроля соблюдения правил дорожного движения транспортными средствами.
Регистратор параметров транспортного средства (РПТС) 14, представленный на фиг.2, состоит из блока приемопередающих устройств регистратора (БППУ) 15, включающего приемник навигационных сигналов (ПНС) 151, приемопередающее устройство дальней связи (ППУДС) 152 и приемопередающее устройство ближней связи (ППУБС) 153, и соединен шиной ввода-вывода с выходом блока переработки информации (БПИ) 13, содержащего блок согласования и настройки (БСН) 29, микропроцессор (МП) 30, выполненный с возможностью организации в криптографической форме информационного архива о проведении транспортным средством рейсов и перевозимом грузе (данные путевого листа и товарно-транспортной накладной) за определенный период его эксплуатации (месяц, квартал, полугодие, год и т.п.), расчета, фиксации и хранения навигационных параметров нахождения подвижной единицы (ПЕ) 2 на маршруте следования и информации контроля ее технических и эксплуатационных параметров, сравнения ее с имеющимися ограничениями на участке маршрута следования, определения факта нарушения правил перевозки грузов и дорожного движения и адаптации хранимой информации к форматам и протоколам обмена в локальной вычислительной сети и управлением ее передачей через блок приемопередающих устройств (БППУ) 15 регистратора параметров транспортного средства (РПТС) 14, блок запоминающих устройств (БЗУ) 31, состоящий из блока памяти (БП) 311 и блока задания условий и контроля рейса (БЗУ и КР) 312, выполненных с возможностью хранения информационного архива криптографической информации о проведении транспортным средством рейсов и перевозимом в них грузе (данные путевого листа и товарно-транспортной накладной) за определенный период его эксплуатации (месяц, квартал, полугодие, год и т.п.), а также информации о значениях контролируемых технических и эксплуатационных параметрах подвижной единицы (ПЕ) 2 и ограничениях, накладываемых на правила дорожного движения и перевозки грузов на участках маршрута следования соответственно, блока времени (БВ) 32, выполненного с возможностью формирования временных дискрет контроля технических и эксплуатационных параметров подвижной единицы (ПЕ) 2 и определения ее навигационных параметров, причем блок согласования и настройки (БСН) 29 подключен шиной ввода-вывода к соответствующему порту микропроцессора (МП) 30, а блок времени (БВ) 32 и блок запоминающих устройств (БЗУ) 31 соединены соответствующими шинами ввода-вывода с портами микропроцессора (МП) 30, при этом входами блока переработки (БПИ) 13 информации являются входы блока согласования и настройки (БСН) 29.
Рассмотрим работу системы.
Система работает по алгоритмам, представленным на фиг.3, фиг.4, фиг.5. фиг.6. фиг.7. следующим образом.
Перед началом эксплуатации системы в каждой подвижной единице (ПЕ) 2 по командам оператора автоматизированного рабочего места (АРМ) 11 базовой станции (БС) 1 (алгоритм фиг.3) производится через первое приемопередающее устройство (ППУ) 7 базовой станции (БС) 1 и приемопередающее устройство дальней связи (ППУДС) 152 регистратора параметров транспортного средства (РПТС) 14 первичная установка ее параметров следующим образом:
- Регистратор параметров транспортного средства (РПТС) 14 адаптируется к конкретному типу транспортного средства путем программной настройки его блока согласования и настройки (БСН) 29 на данный тип и вид блока датчиков (БД) 12 (где хотя бы один из которых выполнен в качестве аварийного и управляемого водителем транспортного средства), их конфигурацию, кроме этого ему присваивается конкретный номер, совпадающий с номером транспортного средства, который сохраняется за ним на всем этапе эксплуатации транспортного средства.
- В блок памяти (БП) 311 регистратора параметров транспортного средства (РТПС) 14 блока запоминающих устройств (БЗУ) 31 вводится значение дискреты времени контроля параметров транспортного средства, которое также вводится в блок времени (БВ) 32.
- В блок задания условий и контроля рейса (БЗУ и КР) 312 блока запоминающих устройств (БЗУ) 31 вводится информация о типе транспортного средства (грузовой автомобиль, автобус, легковой автомобиль, автомобиль с прицепом, мотоцикл, трактор или транспортное средство общего пользования): данные его технического паспорта, информация о его весовых и габаритных характеристиках и перевозимого в рейсе груза (пассажирах): данные путевого листа и данные товарно-транспортной накладной, оформленные в электронном виде. Кроме этого эта информация (данные путевого листа и товарно-транспортной накладной) микропроцессором (МП) 30 регистратора параметров транспортного средства (РПТС) 14 по каждому рейсу транспортного средства, проведенному за определенный отрезок времени (квартал, полугодие, год и т.п.), криптографируется, архивируется и помещается в отдельную зону блока задания условий и контроля рейса (БЗУ и КР) 312, доступ к которой может быть осуществлен только с помощью специального программного продукта, имеющегося у контролирующих и административных органов (УГИБДД, Управление Государственного автодорожного надзора (Транспортная инспекция РФ), Таможенные органы, налоговые органы и т.п.).
Конструктивно блок запоминающих устройств (БЗУ) 31 может быть выполнен на основе репрограммируемых постоянных запоминающих устройств, чем обеспечивается возможность его перепрограммирования в случаях соответственно изменения региона эксплуатации данного транспортного средства или изменения действующих ограничений на движение транспортных средств по дорожной сети региона. В качестве таких репрограммируемых постоянных запоминающих устройств могут быть использованы, например, запоминающие устройства типа AT45DB642 производства фирмы Atmel. Подобные запоминающие устройства позволяют хранить базы данных дорожной сети и действующие ограничения на движение транспортных средств для маршрутов региона площадью 800000-1000000 квадратных километров.
Ограничения, вводимые в блок задания условий и контроля рейса (БЗУ и КР) 312, отражают следующую информацию: привязанная к геодезическим координатам база данных дорожной сети маршрута, данные о действующих на ее участках ограничениях, например ограничения по скорости движения (скоростные ограничения) и нагрузкам на ось (весовые ограничения), ограничения по габаритам перевозимого груза, а также запрещающие дорожные знаки, предписывающие дорожные знаки или горизонтальная дорожная разметка, данные о границах населенных пунктов и об участках дорожной сети, на которых запрещена остановка или стоянка транспортных средств и т.п.
Далее при эксплуатации подвижной единицы (ПЕ) 2 регистратор параметров транспортного средства (РПТС) 14 работает автономно и осуществляет по сигналам, генерируемым его микропроцессором (МП) 30, с заданной блоком времени (БВ) 32 дискретностью последовательный циклический опрос блока датчиков (БД) 12 (один из которых является датчиком внештатной (аварийной) ситуации, управляемый водителем подвижной единицы ПЕ 2), фиксацию его результатов в виде определенных кодов, определение навигационных параметров подвижной единицы (ПЕ) 2 на маршруте следования и контроль за соблюдением подвижной единицей (ПЕ) 2 правил дорожного движения и перевозки грузов. Хранение результатов контроля осуществляется по командам микропроцессора (МП) 30 в блоке памяти запоминающих устройств (БЗУ) 31 под соответствующими адресами. Кроме этого микропроцессор (МП) 30 производит адаптацию этой информации к форматам и протоколам обмена в локальной вычислительной сети системы и готовит ее передачу блоком приемопередающих устройств (БППУ) 15 регистратора параметров транспортного средства (РПТС) 14 в соответствующие пункты управления и контроля.
При выходе транспортного средства на маршрут движения включается аппаратура регистратора параметров транспортного средства (РПТС) 14. Приемник навигационных сигналов (ПНС) 151 по каналу навигационной связи «а» осуществляет прием навигационных сигналов с находящихся в зоне видимости спутников глобальной спутниковой навигационной системы 4, например, GPS или "ГЛОНАСС". Навигационная информация в виде сигналов, переданных по этому каналу и принятых приемником навигационных сигналов (ПНС) 151, поступает по шине ввода - вывода в блок переработки информации (БПИ) 13 регистратора параметров транспортного средства (РПТС) 14, где в соответствии с известными навигационными алгоритмами его функционирования (Бортовые устройства спутниковой радионавигации. / Под редакцией Шебшаевича B.C. - М.: Транспорт, 1988, (с.88, рис.35, с.120, рис.56)) выполняет в реальном масштабе времени, с заданной блоком времени (БВ) 32 временной дискретой определение текущих значений времени, координат и скорости (навигационных параметров) транспортного средства. Полученные таким образом текущие значения навигационных параметров транспортного средства поступают в блок памяти (БП) 311, где они запоминаются в выделенной зоне памяти под соответствующим адресом.
Соблюдение подвижной единицей (ПЕ) 2 правил дорожного движения и перевозки грузов происходит следующим образом. На зафиксированный блоком времени (БВ) 32 момент определения навигационных параметров транспортного средства, его технических и эксплуатационных параметров, полученных от блока датчиков (БД) 12, микропроцессор (МП) 30 обращается к блоку задания условий и контроля рейса (БЗУ и КР) 312, из которого извлекаются хранящиеся в базе данных ограничения, действующие на этом участке маршрута на движение транспортных средств в соответствии с типом транспортного средства и его техническими характеристиками. Указанная информация о действующих ограничениях в микропроцессоре (МП) 30 сравнивается с их полученными реальными значениями. При каком-либо несоответствии контролируемых технических и эксплуатационных параметров транспортного средства и его навигационных параметров микропроцессор (МП) 30 автоматически формирует информационное сообщение о номере данного транспортного средства, его координатах, значениях текущего времени и характере выявленного несоответствия, то есть о виде нарушения правил эксплуатации транспортного средства, транспортировке грузов и дорожного движения. Одновременно под управлением микропроцессора (МП) 30 указанная информация записывается под соответствующим адресом в блок задания условий и контроля рейса (БЗУ и КР) 312 и блок памяти (БП) 311.
Сформированное микропроцессором (МП) 30 блока переработки информации (БПИ) 13 регистратора параметров транспортного средства (РПТС) 14 сообщение о выявленном несоответствии по запросу базовой станции (БС) 1 передается по каналу дальней связи «б» на базовую станцию (БС) 1, где оно принимается первым приемопередающим устройством (ППУ) 7. Кроме этого микропроцессор (МП) 30 блока переработки информации (БПИ) 13 регистратора параметров транспортного средства (РПТС) 14 передает это сообщение в соответствующее приемопередающее устройство ближней связи (ППУБС) 153, которое, после ее получения, постоянно передает его по каналу ближней связи «с» в эфир.
Пункт (пост) весового и габаритного контроля (ПВГК) 5 работает по алгоритму, приведенному на фиг.5, следующим образом. Четвертое приемопередающее устройство (ППУ) 19 пункта (поста) весового и габаритного контроля (ПВГК) 5 при вхождении транспортного средства в зону приема сигнала сообщения о допущенном нарушении, сгенерированного микропроцессором (МП) 30 регистратора параметров транспортного средства (РПТС) 14 и переданного посредством его приемопередающего устройства ближней связи (ППУБС) 153, принимает по каналу ближней связи «с» это сообщение и передает его по шине ввода-вывода на вход третьей ПЭВМ 20, выполненной с возможностью обработки полученного сигнала с определением следующих данных: номера транспортного средства, допустившего нарушение, вида нарушения (веса или габаритов), участка маршрута (координаты), где было допущено нарушение. Информация о нарушении в виде удобном для восприятия человеком (форма выходного документа, мнемосхема, таблица и т.д.) передается третьей ПЭВМ 20 по шине ввода-вывода на автоматизированное рабочее место (АРМ) 24 пункта (поста) весового и габаритного контроля (ПВГК) 5. Оператор поста весового и габаритного контроля (ПВГК) 5, получив эту информацию, формирует посредством третьей ПЭВМ 20 сигнал, передающийся на первый блок видеонаблюдения и регистрации (БВ и Р) 21, о поиске в общем потоке транспортных средств того транспортного средства, которое допустило зафиксированные на пункте (посте) весового и габаритного контроля (ПВГК) 5 нарушение весовых и габаритных характеристик. При обнаружении этого транспортного средства первым блоком видеонаблюдения и регистрации (БВ и Р) 21 видеоинформация кодируется в цифровой вид и по соответствующей шине ввода-вывода по сигналам управления, генерируемым третьей ПЭВМ 20, передается на автоматизированное рабочее место (АРМ) 24 оператора этого поста. На основе идентификации транспортного средства сотрудник поста весового и габаритного контроля (ПВГК) 5 производит следующие действия: его выделение из общего потока движения, остановку и в зависимости от допущенного нарушения (вес или габариты) производит фактический контроль параметров, которые были нарушены транспортным средством на маршруте следования. Результаты фактического контроля, полученные в блоках весового (БВК) 22 или габаритного контроля (БГК) 23, поступают по соответствующей шине ввода-вывода на вход третьей ПЭВМ 20, которая фиксирует дату и время произведенного контроля, производит фиксацию результатов контроля (фактического веса и габаритов), рассчитывает допущенный при этом ущерб, нанесенный транспортным средством дорожному полотну, осуществляет ведение электронного архива транспортных средств, прошедших контроль на пункте (посту) весового и габаритного контроля (ПВГК) 5, назначает стоимость проезда, оформляет чеки кассового сбора, рассчитывает штрафы по фактически допущенному превышению весовых или габаритных параметров транспортного средства и груза, оформляет акты и протоколы за допущенные автоперевозчиком правонарушения по этим параметрам.
После проведения указанных операций третья ПЭВМ 20 формирует управляющий сигнал, по которому результативная информация контроля по этому нарушению посредством четвертого приемопередающего устройства (ППУ) 19 передается по каналу ближней связи «с» и под управлением микропроцессора (МП) 30 записывается под соответствующим адресом в блок задания условий и контроля рейса (БЗУ и КР) 312. После проведения этой записи блок переработки информации (БПИ) 13 анализирует оставшуюся очередь сообщений о допущенных нарушениях. Если они имеются, то вся процедура регистрации фактических результатов допущенных нарушений повторяется вновь согласно описанной выше последовательности. При обработке таким образом всех допущенных транспортным средством нарушений микропроцессор (МП) 30 регистратора параметров транспортного средства (РПТС) 14 переводит свое приемопередающее устройство ближней связи (ППУБС) 153 в ждущий режим, а вся информация о допущенных нарушениях правил перевозки грузов удаляется из блока 311.
Таким образом, по результатам фактического контроля весовых и габаритных параметров транспортного средства и определения ущерба по допущенным транспортным средством нарушениям весовых и габаритных характеристик на маршруте следования в блоке задания условий и контроля рейса (БЗУ и КР) 312 хранится информация как о самом нарушении, так и о конкретных действиях и их результатах со стороны уполномоченных органов по его устранению в реальных условиях следования транспортного средства по маршруту следования.
Пункт (пост) контроля движения транспортных средств (ПКДТС) 6 работает по алгоритму, представленному на фиг.6, следующим образом. При вхождении подвижной единицы (ПЕ) 2 в зону приема сигнала ближней связи «с» сообщение о допущенном нарушении, сгенерированное микропроцессором (МП) 30 регистратора параметров транспортного средства (РПТС) 14 и переданного посредством его приемопередающего устройства ближней связи (ППУБС) 153, принимается пятым приемопередающим устройством (ППУ) 25, которое передает его по шине ввода-вывода на вход четвертой ПЭВМ 27. Четвертая ПЭВМ 27 выполнена с возможностью обработки полученного сигнала с определением номера транспортного средства, допустившего нарушение, вида нарушения (правил дорожного движения), участка маршрута (координаты), где было допущено нарушение. Информация о нарушении в виде, удобном для восприятия человеком (форма выходного документа, мнемосхема, таблица и т.д.), четвертой ПЭВМ 27 передается по шине ввода-вывода на автоматизированное рабочее место (АРМ) 28 пункта (поста) контроля движения транспортных средств (ПКДТС) 6. Оператор этого поста, получив эту информацию, формирует посредством четвертой ПЭВМ 27 сигнал на второй блок видеонаблюдения и регистрации (БВ и Р) 26 о поиске в общем потоке транспортных средств того, кто допустил нарушение. При обнаружении транспортного средства вторым блоком видеонаблюдения и регистрации (БВ и Р) 26 видеоинформация кодируется в цифровой вид и по соответствующей шине ввода-вывода по сигналам управления, генерируемым четвертой ПЭВМ 27, передается на автоматизированное рабочее место (АРМ) 28 оператора пункта контроля движения транспортных средств (ПКДТС) 6. На основе идентификации транспортного средства сотрудник поста контроля движения транспортных средств (ПКДТС) 6 производит его выделение из общего потока движения, остановку и в зависимости от допущенного нарушения производит с помощью четвертой ПЭВМ 27 оформление результатов нарушения правил дорожного движения на конкретном участке маршрута следования транспортного средства. Четвертая ПЭВМ 27 фиксирует дату и время произведенного контроля, его результатов (нарушений правил дорожного движения), осуществляет ведение электронного архива транспортных средств, прошедших контроль на пункте (посту), назначает стоимость проезда, оформляет чеки кассового сбора, рассчитывает штрафы по фактически допущенному нарушению правил дорожного движения оформляет акты и протоколы за допущенные водителем правонарушения.
После проведения указанных операций четвертая ПЭВМ 27 формирует управляющий сигнал, по которому результативная информация контроля посредством пятого приемопередающего устройства (ППУ) 25 по каналу ближней связи «с» через приемопередающее устройство ближней связи (ППУБС) 153 регистратора параметров транспортного средства (РПТС) 14 подвижной единицы (ПЕ) 2 под управлением микропроцессора (МП) 30 записывается под соответствующим адресом в блок задания условий и контроля рейса (БЗУ и КР) 312. После проведения этой записи блок переработки информации (БПИ) 13 анализирует оставшуюся очередь сообщений о допущенных нарушениях. Если они имеются, то вся процедура регистрации фактического результата допущенного нарушения, определения и оформления результатов контроля повторяется вновь согласно описанной выше последовательности. При обработке таким образом всех допущенных транспортным средством нарушений микропроцессор (МП) 30 регистратора параметров транспортного средства (РПТС) 14 переводит свое приемопередающее устройство ближней связи 153 в ждущий режим, а вся информация о допущенных нарушения правил дорожного движения стирается из блока памяти (БП) 311.
Таким образом, по результатам фактического контроля и определения ущерба по допущенным транспортным средством нарушениям правил дорожного движения на маршруте следования в блоке задания условий и контроля рейса (БЗУ и КР) 312 хранится информация как о самих нарушениях, так и о конкретных действиях и их результатах со стороны уполномоченных органов по их устранению в реальных условиях следования транспортного средства по маршруту перевозок.
Конструктивно аппаратура пунктов (постов) весового и габаритного контроля (ПВГК) 5 и контроля движения транспортных средств (ПКДТС) 6 может быть выполнена на основе системы «Вектор», изготовленной Научно-производственной фирмой «Мета» (445359, Самарская область, г.Жигулевск, ул.Радиозаводская, 1 А/Я 25)
Если при сравнении текущей информации о движении транспортного средства по маршруту его следования не выявлено отклонений от их заданных маршрутных значений, то информация контроля под управлением микропроцессора (МП) 30 записывается в блок памяти (БП) 311 по соответствующему адресу в виде навигационных параметров.
При нахождении подвижной единицы (ПЕ) 2 на маршруте следования с помощью первого приемопередающего устройства (ППУ) 7 базовой станции 1 осуществляется автоматический опрос ее регистратора параметров транспортного средства (РПТС) 14 по алгоритму работы микроконтроллера (МК) 9 базовой станции 1, представленному на фиг.3. Согласно ему первая ПЭВМ 10 через микроконтроллер (МК) 9 и первое приемопередающее устройство (ППУ) 7 базовой станции (БС) 1 по каналу дальней связи «б» автоматически без участия оператора автоматизированного рабочего места (АРМ) 11 формирует адреса подвижных единиц (ПЕ) 2 и производит их опрос. По управляющим сигналам микроконтроллера (МК) 9 осуществляется съем информации из блока запоминающих устройств (БЗУ) 31 регистратора параметров транспортного средства (РПТС) 14 и ее передача по каналу дальней связи «б» с помощью приемопередающего устройства дальней связи (ППУДС) 152 подвижной единицы (ПЕ) 2 и первого приемопередающего устройства (ППУ) 7 базовой станции (БС) 1 в микроконтроллер (МК) 9 базовой станции (БС) 1. После успешного сеанса связи по передаче информации о значениях навигационных, технических и эксплуатационных параметрах по сигналу микроконтроллера (МК) 9 она автоматически стирается из блока памяти (БП) 311 регистратора параметров транспортного средства (РПТС) 14. Полученная информация хранится в памяти микроконтроллера (МК) 9 базовой станции (БС) 1 под соответствующим адресом подвижной единицы (ПЕ) 2 и временем ее получения. Организация указанного обмена информации осуществляется автоматически под управлением сигналов микроконтроллера (МК) 9 базовой станции (БС) 1. Если в зоне контроля базовой станции (БС) 1 находится несколько подвижных единиц (ПЕ) 2, то их опрос осуществляется в порядке возрастания их номеров. Поскольку ответные сообщения формируются только после успешного завершения сеанса связи с конкретной подвижной единицей (ПЕ) 2 по своему номеру, то исключается возможность получения сигналов с нескольких подвижных единиц (ПЕ) 2 одновременно. Если в зоне контроля базовой станции (БС) 1 нет ни одной подвижной единицы (ПЕ) 2, то производится постоянная генерация микроконтроллером (МК) 9 сигналов опроса в этой зоне. Информационные посылки передаются помехозащищенным кодом с обнаружением и исправлением ошибок, что позволяет существенно повысить помехозащищенность передаваемой информации. После успешного приема информации на базовой станции (БС) 1 в ответном сообщении посылается на подвижную единицу (ПЕ) 2 сигнал квитирования. При отсутствии сигнала квитирования от подвижной единицы (ПЕ) 2 базовая станция (БС) 1 посылает повторный запрос.
Таким образом, в результате этого в памяти микроконтроллера (МК) 9 находится информация о значениях навигационных, технических и эксплуатационных параметров всех подвижных единиц (ПЕ) 2 за прошедший период их эксплуатации и нахождения их на маршруте, а также информация о допущенных ими нарушениях правил дорожного движения и транспортировки грузов.
Первая ПЭВМ 10 базовой станции (БС) 1, работая по алгоритму фиг.4, производит обработку полученной микроконтроллером (МК) 9 информации о значениях навигационных, технических и эксплуатационных параметров любой подвижной единицы (ПЕ) 2 (по заданному оператором автоматизированного рабочего места (АРМ) 11 адресу и дате) следующим образом. Во-первых, первая ПЭВМ 10 производит отображение маршрута движения транспортного средства и значений каждых из контролируемых параметров полученных микроконтроллером (МК) 9, во-вторых, фиксирует все нарушения правил дорожного движения и транспортировки грузов, допущенные водителем транспортного средства, а в-третьих, она преобразует эти данные в удобную форму для их визуального восприятия оператором автоматизированного рабочего места (АРМ) 11. Алгоритм работы первой ПЭВМ 10 (фиг.4) в своем составе имеет ряд логических операторов, которые служат для оператора автоматизированного рабочего места (АРМ) 11 базовой станции (БС) 1 входом через соответствующие запросы с автоматизированных рабочих мест (АРМ) 11 в общий алгоритм работы автоматизированной системы контроля эксплуатации транспортных средств. При этом согласно ему оператор автоматизированного рабочего места (АРМ) 11 базовой станции (БС) 1 может:
- задать номер конкретной подвижной единицы (ПЕ) 2 и любой временной интервал контроля ее работы на маршруте,
- сформировать и распечатать в виде, удобном для восприятия (мнемосхема, таблица и т.п.), выходной документ о работе конкретной подвижной единицы (ПЕ) 2 на заданную дату контроля (фиг.8, 9),
- произвести адаптацию работы автоматизированной системы контроля эксплуатации транспортных средств путем программной настройки блока согласования и настройки (БСН) 29 на данный тип и вид датчиков, их конфигурацию, число и начальную дату его эксплуатации с заданием в блоке запоминающих устройств (БЗУ) 31 его номера и записи в блок времени (БВ) 32 значения дискреты времени контроля технических, эксплуатационных и навигационных параметров транспортного средства,
- произвести коррекцию информации в регистраторе параметров транспортного средства (РПТС) 14 любой подвижной единицы (ПЕ) 2 путем присвоения ей нового номера, иного типа и вида контролируемых параметров блоком датчиков (БД) 12 и их числа, а также значения новой временной дискреты контроля параметров,
- произвести криптографическую архивацию информации о проведении транспортным средством рейсов и перевозимом грузе (данные путевого листа и товарно-транспортной накладной) за определенный период его эксплуатации (месяц, квартал, полугодие, год и т.п.).
Примеры выходных документов по запросу оператора автоматизированного рабочего места (АРМ) 11 базовой станции 1 представлен на фиг.8 и 9. Документ фиг.8 показывает нахождение подвижной единицы (ПЕ) 2 на маршруте следования. Документ фиг.9 состоит из нескольких окон: окно даты, где автоматически формируется текущая дата контроля (принудительно по команде оператора можно задать любую дату эксплуатации подвижной единицы (ПЕ) 2); окно транспортного средства, работающего на маршруте в этот период, с расшифровкой его номера и нарушения, допущенного им на маршруте; окно значений параметров, где представлены их фактические значения на дату контроля, превышение над допустимыми значениями с фиксацией местоположения; окно статистики, характеризующей средние значения контролируемых параметров на время контроля.
Вся итоговая информация о работе подвижной единицы (ПЕ) 2, включенных в состав базовой станции (БС) 1 согласно алгоритма фиг.4 автоматически без участия операторов автоматизированных рабочих мест (АРМ) 11 базовой станции (БС) 1 и 18 центрального диспетчерского пункта (ЦДП) 3 по управляющим сигналам второй ПЭВМ 17 с помощью второго приемопередающего устройства (ППУ) 8 базовой станции (БС) 1 и третьего приемопередающего устройства (ППУ) 16 центрального диспетчерского пункта (ЦДП) 3 по каналу связи «д», использующему помехозащищенный код, поступает на вторую ПЭВМ 17 центрального диспетчерского пункта (ЦДП) 3. Здесь она архивируется и хранится под соответствующими адресами подвижных единиц (ПЕ) 2 базовой станции (ПЕ) 1.
По запросам операторов автоматизированных рабочих мест (АРМ) 18 центрального диспетчерского пункта (ЦДП) 3 формируются итоговые статистические данные о маршрутах и работе любых подвижных единиц 2 базовой станции (БС) 1 за заданный промежуток времени с анализом допущенных при этом нарушений правил эксплуатации, технического состояния, дорожного движения и перевозки грузов подвижной единицы (ПЕ) 2 на маршруте следования.
Рассмотрим работу регистратора параметров транспортного средства (РПТС) 14.
Регистратор параметров транспортного средства (РПТС) 14 фиг.2, работает по алгоритму, представленному на фиг.7, следующим образом.
При установке регистратора параметров транспортного средства (РПТС) 14 на подвижную единицу (ПЕ) 2 происходит регистрация подачи на него питания, что запоминается в блоке памяти (БП) 311. Перед выездом подвижной единицы (ПЕ) 2 в рейс внешними командами операторов автоматизированного рабочего места (АРМ) 11 базовой станции (БС) 1 осуществляется настройка регистратора параметров транспортного средства (РПТС) 14 на конфигурацию блока датчиков (БД) 12: их число и тип (аналоговые или цифровые). Также в блоке согласования и настройки (БСН) 29 осуществляется их калибровка на величины измеряемых параметров, кроме этого в блоке времени (БВ) 32 задается интервал времени (дискрета) контроля параметров транспортного средства и расчета навигационных параметров нахождения ее на маршруте следования. В блоке памяти (БП) 311 и блоке задания условий и контроля рейса (БЗУ и КР) 312 записывается код транспортного средства.
Кроме этого в блок задания условий и контроля рейса (БЗУ и КР) 312 под управлением микропроцессора (МП) 30 записывается следующая информация:
- привязанный к географическим координатам района маршрут проводимого рейса и информация о характеристиках транспортного средства (данные технического паспорта) и его водителе (данные путевого листа);
- особые условия маршрута: скоростные, габаритные, весовые, временные и иные ограничения на нем;
- характеристики перевозимого груза (данные товарно-транспортной накладной, а также его весовые и габаритные характеристики), эта информация криптографируется микропроцессором (МП) 30 по каждому рейсу и накапливается в блоке задания условий и контроля рейса (БЗУ и КР) 312 в виде архивных данных, доступ к которым может быть осуществлен только с помощью специального программного продукта, имеющегося у контролирующих и административных органов (УГИБДД, Управление Государственного автодорожного надзора (Транспортная инспекция РФ), Таможенные органы, налоговые органы и т.п.).
Указанный блок задания условий и контроля рейса (БЗУ и КР) 312 является съемным. Информация, оговоренная выше, записывается в него на каждый рейс, затем он устанавливается на регистратор параметров транспортного средства (РПТС) 14, опечатывается и не может быть снят с него в течение всего периода рейса водителем транспортного средства.
После завершения рейса он снимается специалистом автотранспортного предприятия и передается операторам базовой станции (БС) 1, которые производят анализ информации о протекании рейса (допущенных водителем нарушениях на маршруте следования и понесенных за них штрафных санкциях и административных мерах) с помощью специальной программы на первой ПЭВМ 10. Емкость блока задания условий и контроля рейса (БЗУ и КР) 312 является достаточной для записи информации в течение трех месяцев, что более чем достаточно для самых продолжительных рейсов.
При движении транспортного средства навигационные сигналы от системы GPS/ГЛОНАСС 4 поступают по каналу навигационной связи «а» через приемник навигационных сигналов (ПНС) 151 по шине ввода - вывода в блок переработки информации (БПИ) 13 регистратора параметров транспортного средства (РПТС) 14, где он в соответствии с навигационными алгоритмами с заданной блоком времени (БВ) 32 временной дискретой в реальном масштабе времени определяет текущие значения навигационных параметров: координат, времени и скорости движения транспортного средства. Полученные таким образом навигационные параметры поступают в блок памяти (БП) 311, где они в виде определенных кодов запоминаются в выделенной зоне под соответствующим адресом.
Кроме этого регистратор параметров транспортного средства (РПТС) 14, работая автономно, с временной дискретой, заданной блоком времени (БВ) 32, по сигналам, генерируемым его микропроцессором (МП) 30, производит последовательный циклический опрос блока датчиков (БД) 12. Полученные таким образом значения параметров транспортного средства фиксируются в виде определенных кодов. Их хранение осуществляется по командам микропроцессора (МП) 30 в блоке памяти (БП) 311. Дополнительно микропроцессор (МП) 30 производит адаптацию этой информации к форматам и протоколам обмена в локальной вычислительной сети системы и готовит ее передачу соответствующими приемопередающими устройствами блока приемопередающих устройств (БППУ) 15.
На зафиксированный блоком времени (БВ) 32 момент времени навигационная информация и данные о его технических и эксплуатационных параметрах, полученных от блока датчиков (БД) 12, хранятся в блоке памяти (БП) 311.
Контроль соблюдения подвижной единицей (ПЕ) 2 правил дорожного движения и перевозки грузов регистратором параметров транспортного средства (РПТС) 14 подвижной единицей (ПЕ) 2 осуществляется следующим образом. Микропроцессор (МП) 30, обращаясь к блоку задания условий и контроля рейса (БЗУ и КР) 312, извлекает из него действующие на этом участке маршрута ограничения на движение транспортных средств в соответствии с его типом и техническими характеристиками. Указанная информация о действующих ограничениях микропроцессором (МП) 30 сравнивается с их полученными реальными значениями на момент контроля. В случае несоответствия контролируемых весовых и габаритных параметров транспортного средства, соблюдения правил дорожного движения его водителем микропроцессор (МП) 30 автоматически формирует информационное сообщение о номере данного транспортного средства, его координатах, значении текущего времени и характере выявленного несоответствия. Одновременно под управлением микропроцессора (МП) 30 указанная информация записывается под соответствующим адресом в блок задания условий и контроля рейса (БЗУ и КР) 312 и блок памяти 311.
Кроме этого микропроцессор (МП) 30 формирует сообщение о допущенном несоответствии (нарушении) и переводит приемопередающее устройство ближней связи (ППУБС) 153 в режим передачи и далее управляет передачей этого сообщения по каналу ближней связи «с» в эфир. Эти сообщения обрабатываются пунктами (постами) весового и габаритного контроля (ПВГК) 5 и контроля движения транспортных средств (ПКДТС) 6 (алгоритмы фиг.5, 6), как это было показано выше. После обработки этих сообщений информация по управляющим сигналам третьей ПЭВМ 20 и четвертой ПЭВМ 27 стирается из блока памяти (БП) 311, но остается в блоке задания условий и контроля рейса (БЗУ и КР) 312.
В случае появления запроса от базовой станции (БС) 1, сформированного ее микроконтроллером (МК) 9, который в виде управляющего сигнала поступает по каналу дальней связи «б» от приемопередающего устройства (ППУ) 7 базовой станции (БС) 1, на передачу данных о местоположении транспортного средства, характере протекания рейса и допущенных при этом нарушениях через приемопередающее устройство дальней связи (ППУДС) 152 микропроцессор (МП) 30 производит определение адреса запрашиваемых данных, формирует пакет передаваемой информации и производит ее автоматическую передачу в виде информационной посылки по каналу дальней связи «б» в микроконтроллер (МК) 9 базовой станции (БС) 1 посредством приемопередающего устройства дальней связи (ППУДС) 152. После передачи запрошенного пакета данных микропроцессор (МП) 30 автоматически производит удаление из блока памяти (БП) 311 переданной информации.
Таким образом, в блоке памяти (БП) 311 постоянно между запросами о передаче значений параметров на базовую станцию (БС) 1 накапливается оперативная информация о характере протекания рейса (навигационные параметры маршрута, значения эксплуатационных и технических параметрах, информация о допущенных нарушениях правил дорожного движения и перевозки грузов), которая периодически обновляется под управлением микропроцессора (МП) 30 и передается приемопередающим устройством дальней связи (ППУДС) 152 на базовую станцию (БС) 1, а приемопередающим устройством ближней связи (ППУБС) 153 - на пункты (посты) весового и габаритного контроля (ПВГК) 5 и контроля движения транспортных средств (ПКДТС) 6, а информация о допущенных в ходе рейса нарушениях правил перевозки грузов и дорожного движения, принятых мерах со стороны территориальных органов и их результатах накапливается в виде архива в блоке задания условий и контроля рейса (БЗУ и КР) 312.
В случае возникновения на транспортном средстве нештатной (аварийной) ситуации (авария, пожар, террористический акт, попытка захвата средства и т.п.) ее водителем с помощью соответствующего аварийного датчика (входящего в состав блока датчиков 12) формируется сообщение о конкретной случившейся на транспортном средстве аварийной или нештатной ситуации, которая поступает в блок переработки информации (БПИ) 13, где она подвергается соответствующей обработке согласно алгоритмам работы, описанным в патентах RU 2158663, 2175920, 2196358, 2143745, 2254616, 2174924, и которые могут быть реализованы аппаратно-программными средствами предлагаемой полезной модели, поскольку они содержат все необходимые средства и блоки для реализации предложенных в этих изобретениях методов и алгоритмов оповещения управляющих и контролирующих органов (базовую станцию (БС) 1 и центральный диспетчерский пункт (ЦДП) 3) о возникшей нештатной ситуации на подвижной единице (ПЕ) 2 для принятия оперативных мер по ее устранению со стороны управляющих и контролирующих органов.
Примерная практическая организация изобретения на конкретной структуре обеспечения безопасности движения и управления ею может быть осуществлена в следующей структуре. Подвижная единица - автотранспортное средство: маршрутное такси, автобус, грузовое транспортное средство и т.п.; базовая станция - отдел безопасности движения на автопредприятии; центральный диспетчерский пункт - удаленные терминалы, находящиеся в отделах безопасности Управления транспорта населенных пунктов или территорий, УГИБДД территорий, отделы безопасности территориальных транспортных инспекций, пункты пропуска таможенных органов, налоговые органы; пункт весового и габаритного контроля - пункты весового и габаритного контроля транспортной инспекции и УГИБДД; пункты контроля движения транспортных средств - линейные посты УГИБДД.
Применение предлагаемого изобретения в практике обеспечения безопасности движения позволяет обеспечить решение следующих задач и обеспечение:
- расширения функций автоматизированного контроля в реальном масштабе времени за счет:
а) определения координат подвижной единицы на маршруте следования, определенных с помощью навигационной системы GPS/ГЛОНАСС;
б) фиксации допущенных подвижной единицей нарушений правил дорожного движения и перевозки грузов за счет введения в состав подвижной единицы регистратора параметров транспортного средства, контролирующего значения указанной выше информации с заданной блоком времени дискретой и накапливающего эти значения в блоке запоминающих устройств на протяжении всего времени нахождения транспортного средства на маршруте следования;
в) организации в регистраторе параметров транспортного средства информационного архива в криптографической форме о проведении им рейсов и перевозимом в них грузе (данные путевого листа и товарно-транспортной накладной) за определенный период его эксплуатации (месяц, квартал, полугодие, год и т.п.);
- автоматизированной передачи соответствующих массивов данных о техническом и эксплуатационном состоянии автотранспортного средства, координатах его нахождения на маршруте и допущенных при этом нарушениях правил дорожного движения и перевозки грузов в пункты управления (базовые станции) и контроля (центральный диспетчерский пункт) посредством блока приемопередающих устройств регистратора параметров транспортного средства;
- своевременного автоматизированного информирования соответствующих территориальных органов (пунктов (постов) весового и габаритного контроля и пунктов (постов) контроля движения транспортных средств) о допущенных на маршруте следования нарушениях подвижной единицей правил дорожного движения и перевозки грузов;
- оперативного автоматизированного расчета в территориальных органах пунктах (постах) весового и габаритного контроля и в пунктах (постах) контроля движения транспортных средств сумм штрафных санкций по возмещению нанесенного подвижной единицей ущерба безопасности движения из-за нарушений ей правил дорожного движения и транспортировки грузов и предъявления их водителю;
- автоматизированного информирования управляющих (базовые станции) и контролирующего органов (центральный диспетчерский пункт) о допущенном подвижной единицей на маршруте следования нарушении правил дорожного движения и перевозки грузов, рассчитанных и назначенных за это штрафных санкций со стороны соответствующих территориальных органов (пункты (посты) весового и габаритного контроля и пункты (посты) контроля движения транспортных средств);
- автоматизированного сообщения в управляющие (базовая станция) и контролирующий органы (центральный диспетчерский пункт) о возникновении на подвижной единице нештатной (аварийной) ситуации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ СОБЛЮДЕНИЯ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2007 |
|
RU2384887C2 |
| Система контроля и мониторинга маршрутизированных автотранспортных средств | 2018 |
|
RU2712404C2 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ ЗА СОБЛЮДЕНИЕМ ОГРАНИЧЕНИЙ СКОРОСТНОГО РЕЖИМА ПЕРЕДВИЖЕНИЯ АВТОТРАНСПОРТНЫХ СРЕДСТВ, ПРАВИЛ ИХ ПАРКОВКИ И ДВИЖЕНИЯ ПО ВЫДЕЛЕННОЙ ПОЛОСЕ ДЛЯ ОБЩЕСТВЕННОГО ТРАНСПОРТА | 2016 |
|
RU2634517C1 |
| СПОСОБ КОНТРОЛЯ ЭКСПЛУАТАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ И СИСТЕМА ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257616C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ВЕСОВОГО КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2407995C1 |
| Система контроля и мониторинга автотранспортных средств | 2020 |
|
RU2738664C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2008 |
|
RU2373095C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2004 |
|
RU2264934C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228860C1 |
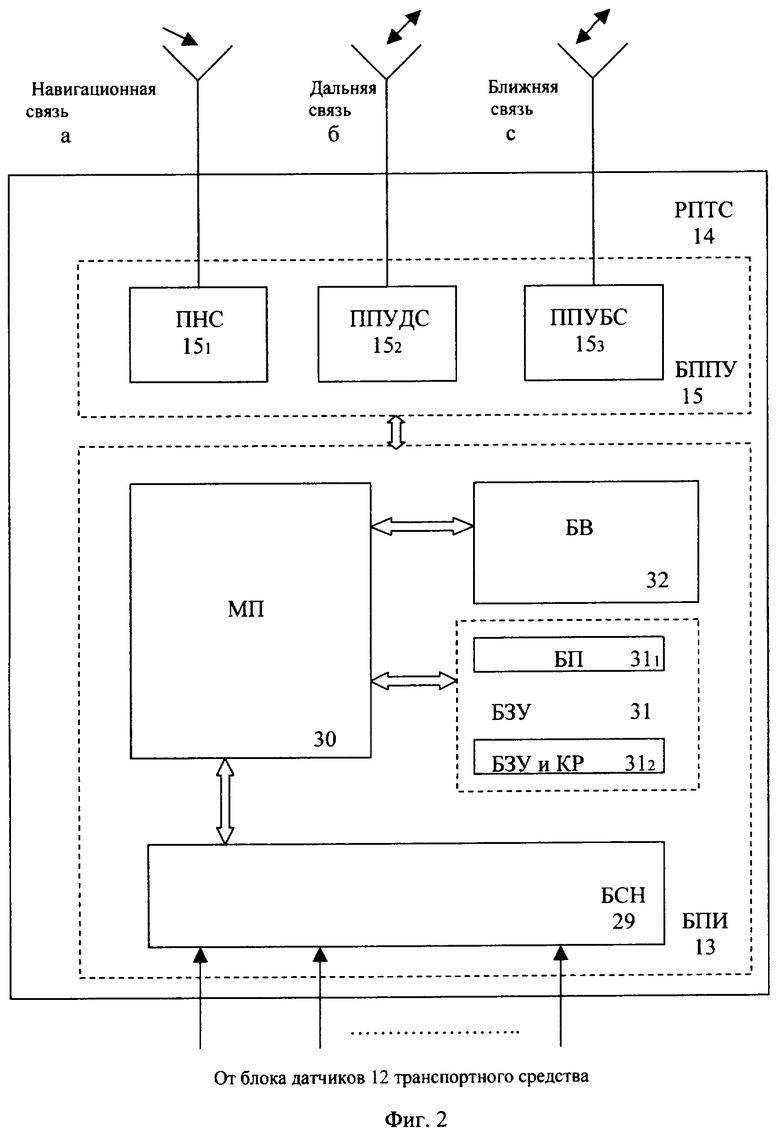
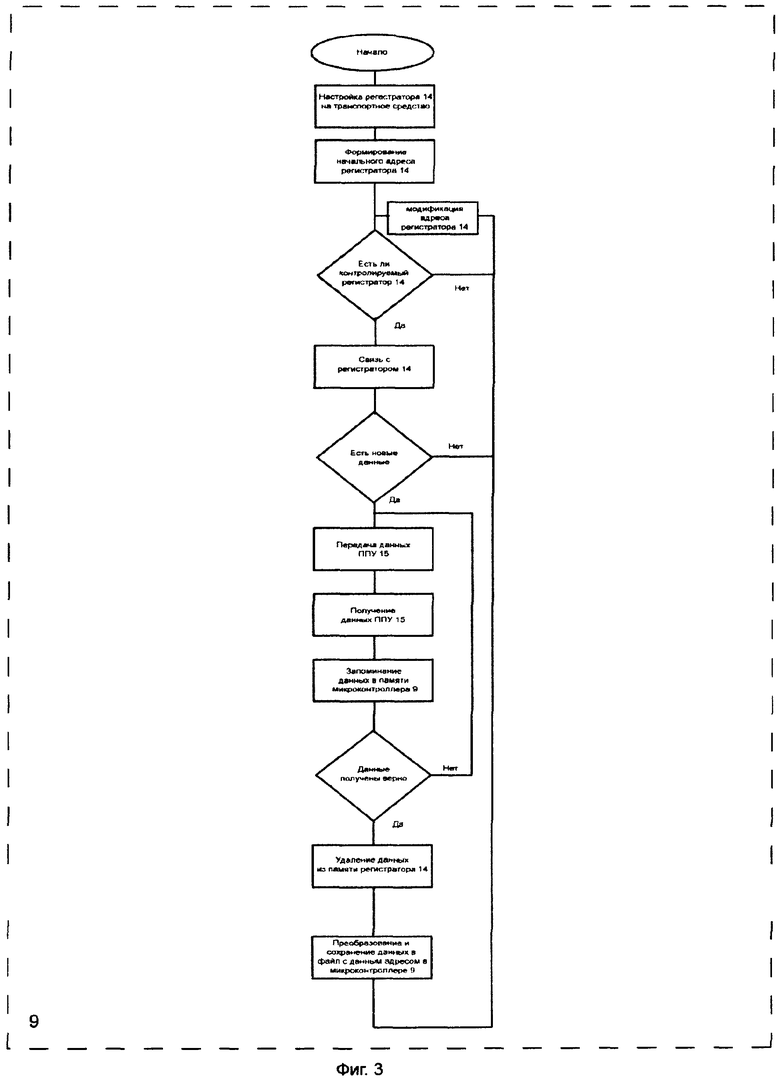

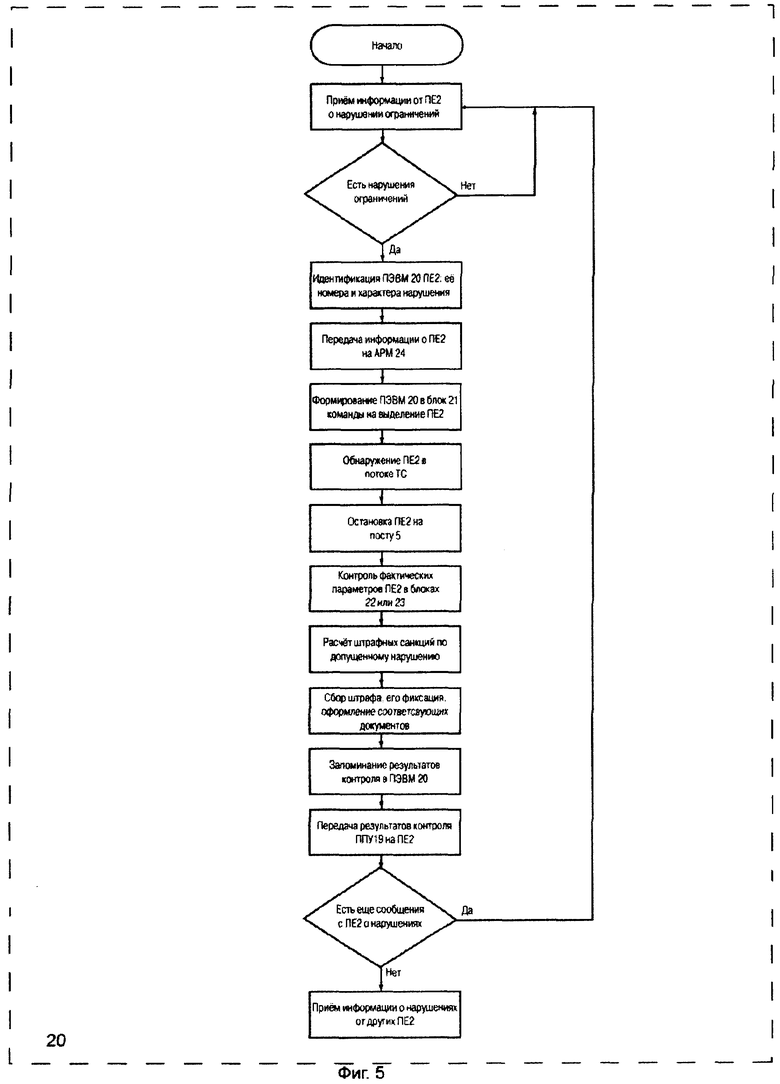

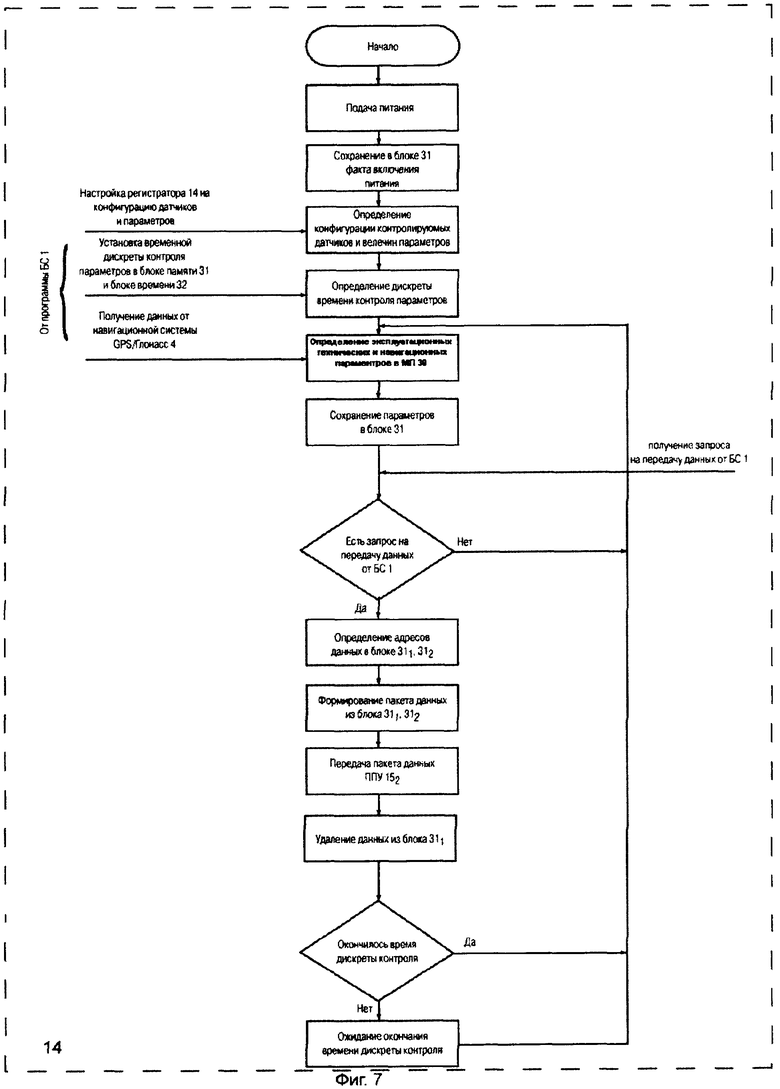
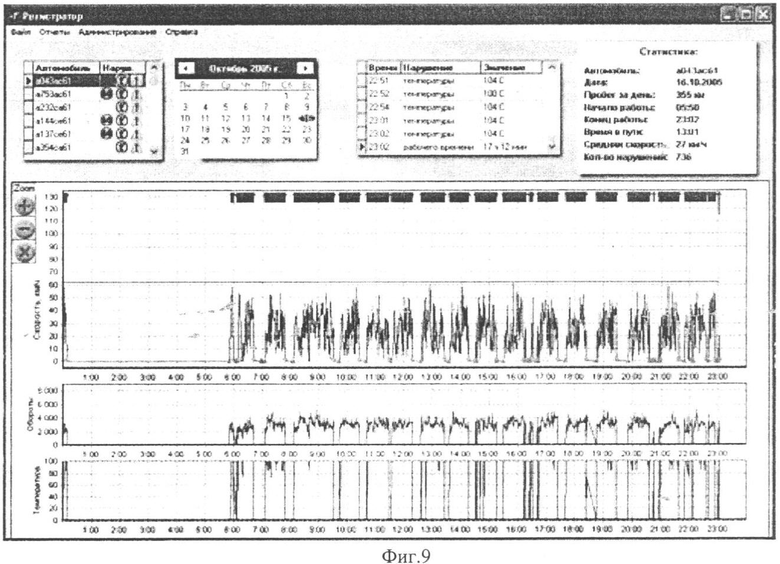
Изобретение относится к средствам контроля движения транспортных средств и соблюдения ими правил перевозки грузов и массо-габаритных параметров перевозимого груза. Для этого транспортное средство оснащается регистратором параметров транспортного средства, который в автоматизированном режиме по определенным алгоритмам с заданной дискретой контролирует через группу датчиков соответствующие параметры его движения, определяет при помощи навигационной системы GPS/ГЛОНАСС его местонахождение, сравнивает их с заданными ограничениями, и в случае возникновения отклонений от заданных ограничений формирует сигнал о нем. Сигнал автоматически передается на пункты контроля движения и пункты весового и габаритного контроля, ведущие учет нарушений, автоматизированный расчет штрафных санкций и предъявляет их водителю транспортного средства. Кроме этого регистратор транспортного средства автоматически ведет протокол прохождения маршрута следования и фиксирует все допущенные нарушения на маршруте. Изобретение позволяет контролировать технические и эксплуатационные параметры транспортного средства и определять его местонахождение на маршруте следования при расположении вне зоны действия маршрутных датчиков, а также фиксировать возможные нарушения правил дорожного движения и перевозок грузов (пассажиров), фактические весовые и габаритные параметры (число пассажиров и др.). Кроме того, обеспечивается своевременное информирование соответствующих территориальных контролирующих органов о допущенных нарушениях и их оперативное реагирование. 2 н.п. ф-лы, 9 ил.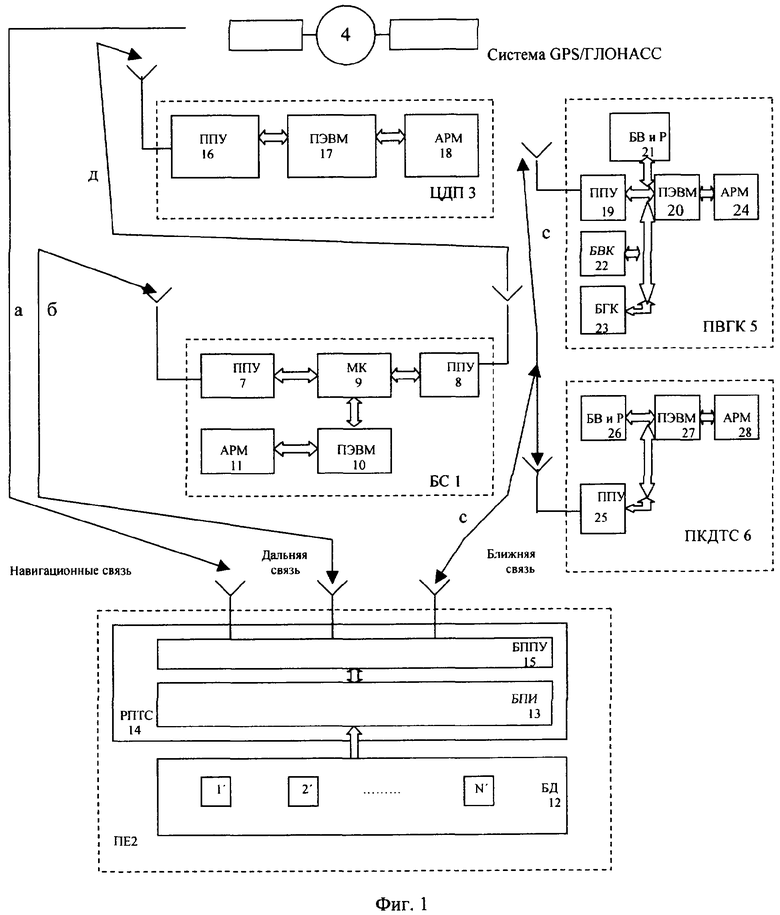
| Кран машиниста | 1937 |
|
SU53049A1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РЕГИСТРАЦИИ ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2178585C1 |
| СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА И ЕГО МЕСТОНАХОЖДЕНИЯ | 2001 |
|
RU2221276C2 |

