Данное изобретение относится к спорту и предназначено для общефизической подготовки и тренировки, кроме того, оно может использоваться в лечебных целях во время восстановительного периода после полученных травм. С помощью тренажеров подобного типа можно развивать и укреплять мышцы рук, ног, спины, груди.
Для физической тренировки в массовой физической культуре и спорте применяются различные тренажерные устройства, которые позволяют тренировать различные мышечные группы в разных режимах мышечного сокращения. Недостатком обычных тренажеров является использование лишь постоянной нагрузки и невозможность ее быстрого изменения во время выполнения движения. В то же время, например, хорошо известны высокоэффективные режимы тренировки, которые предполагают изменение тренировочной нагрузки как в процессе выполнения одного движения, так и во время последовательных движений одной серии. Кроме того, нередко возникает необходимость автоматического поддержания определенной скорости движения во время выполнения упражнения.
Тренировочная целесообразность использования изменяемой тренировочной нагрузки во время одного движения связана с тем, что сила, развиваемая сокращающейся мышцей, зависит от ее длины у разных людей, причем зависимость «сила - длина мышцы» для разных мышц одного человека может существенно различаться. Очевидно, что использование переменной нагрузки, изменяющейся во время выполнения движения в соответствии с физиологическими особенностями тренируемой группы мышц, более эффективно для полноценной физической тренировки. Попытки использования тренировочного режима, в котором внешняя нагрузка изменяется во время движения, имеют место в спортивной практике. Для этих целей используется специальный эксцентрик, изменяющий момент силы на грузоблочных тренажерах. Форма эксцентрика подбирается такой, чтобы изменение момента силы было наиболее эффективным для тренировки данной мышечной группы. К недостаткам такого способа программируемого изменения нагрузки следует отнести трудоемкость замены эксцентрика. Кроме того, данный способ можно реализовать лишь на грузоблочных тренажерах, что, в свою очередь, резко ограничивает область его применения.
Известно также, что напряжение в мышце, развивающееся в эксцентрической фазе движения (опускание груза, растяжение мышцы), гораздо выше, чем в концентрической (подъем, сокращение мышцы). Поэтому для более эффективной тренировки используется следующий методический прием: занимающийся самостоятельно поднимает снаряд (сокращение мышц), после чего помощники добавляют дополнительное отягощение, после чего занимающийся опускает снаряд (растяжение мышц) с увеличенной нагрузкой, затем дополнительное отягощение убирается, и цикл повторяется заново. Несмотря на высокую тренировочную эффективность такого метода тренировки, очевидно, что практическое его использование крайне затруднительно. Тренировочная целесообразность использования программируемого изменения тренировочной нагрузки в течение серии циклических движений связана с утомляемостью мышц. Хорошо известно, что скоростно-силовые возможности мышц снижаются от повторения к повторению. В спортивной практике существует метод тренировки, при котором после каждого повторения (подъем-опускание снаряда) производят снижение нагрузки путем разгрузки снаряда. Трудоемкость данного метода тренировки накладывает серьезные ограничения на его использование. Также известно, что для разных тренировочных целей (увеличение силы сокращения мышц, увеличение скорости сокращения мышц, увеличение объема мышц, повышение мышечной выносливости) существует свой, наиболее оптимальный скоростной режим выполнения тренировочных движений. Однако не все люди способны поддерживать нужную скорость движений в течение всей тренировки.
Наиболее близким аналогом изобретения является устройство по заявке WO 01/64297 А63В 22/08, 2001, однако обычные тренажеры с отягощениями невозможно использовать при выполнении движений с большой скоростью и в высоком темпе из-за их инерциальности.
Задачей изобретения является обеспечение возможности реализации любого алгоритма изменения нагрузки во времени, в том числе с учетом зависимости силы сокращения мышцы от ее длины, эффектов утомления, травмобезопасности при тренировке в эксцентрическом режиме.
Указанный результат достигается за счет того, что в способе тренировки мышц, при котором во время выполнения движений пользователем изменение тренировочной нагрузки осуществляют с помощью силового нагрузочного блока, управляющего устройства, снабженного программой, соответствующей профилю изменения нагрузки, и датчиков положения перемещающейся под воздействием сокращения и растягивания мышц пользователя рабочей платформы, причем каждому показанию датчиков соответствует определенная нагрузка силового нагрузочного блока, при этом движения пользователя выполняются с максимально возможной для пользователя скоростью, а алгоритм программы включает с возможностью изменения два скоростных порога, верхний, при движении которого от датчика положения подается сигнал для повышения нагрузки на величину, пропорциональную уровню превышения порога, и нижний, при достижении которого подается сигнал для снижения нагрузки на величину, пропорциональную уровню превышения порога.
В качестве силового нагрузочного блока используют пневмопривод с клапанами сброса-накачки давления в пневмоцилиндре, контролируемыми управляющим устройством, которое, с учетом информации с датчиков рабочего давления и положения рабочей платформы, задает алгоритм изменения рабочего давления для реализации заданного режима тренировки.
При выполнении разгибания мышц пользователем давление в пневмоцилиндре сохраняют постоянным, при достижении рабочей платформой заданного положения для конкретного пользователя в пневмоцилиндр накачивают посредством клапанов дополнительное давление для осуществления сгибания мышц при большем давлении, которое сохраняется на всем протяжении выполнения сгибания мышц, затем при достижении рабочей платформой исходного начального положения по сигналу с датчика перемещения платформы давление вновь снижается, и цикл повторяется.
При выполнении пользователем циклов по сгибанию и разгибанию мышц с максимально возможной для него скоростью и постоянной нагрузкой изменяют скорость перемещения платформы посредством датчика перемещения, затем в процессе мышечного утомления и снижения скорости сокращения мышц до заданного порога по сигналу с управляющего устройства посредством клапанов снижают давление для повышения скорости мышечного сокращения до следующего снижения скорости при последующем мышечном утомлении и достижения порогового уровня.
Указанный технический результат достигается за счет того, что система для тренировки мышц с использованием изменения тренировочной нагрузки во время движения посредством силового нагрузочного блока содержит рабочую платформу, перемещающуюся поступательно под воздействием сокращения и растягивания мышц пользователя, и управляющее устройство с датчиками, при этом силовой нагрузочный блок связан с перемещающейся рабочей платформой, датчик нагрузки связан с нагрузочным блоком и управляющим устройством, а датчик перемещения связан с рабочей платформой и управляющим устройством.
В качестве силового нагрузочного блока системы использован пневмопривод, состоящий из пневмоцилиндра, клапанов сброса-накачки и компрессора с ресивером для нагнетания сжатого воздуха, при этом состояние клапанов контролируется управляющим устройством, которое, по информации с датчиков нагрузки и перемещения рабочей платформы, задает алгоритм изменения рабочего давления для реализации заданного режима тренировки.
В системе в качестве силового нагрузочного блока могут быть использованы электрический, гидравлический или механический приводы.
Краткое описание чертежей
По биомеханическим характеристикам весь многочисленный парк тренажерных устройств условно можно подразделить на два класса: с поступательными движениями и с вращательными движениями.
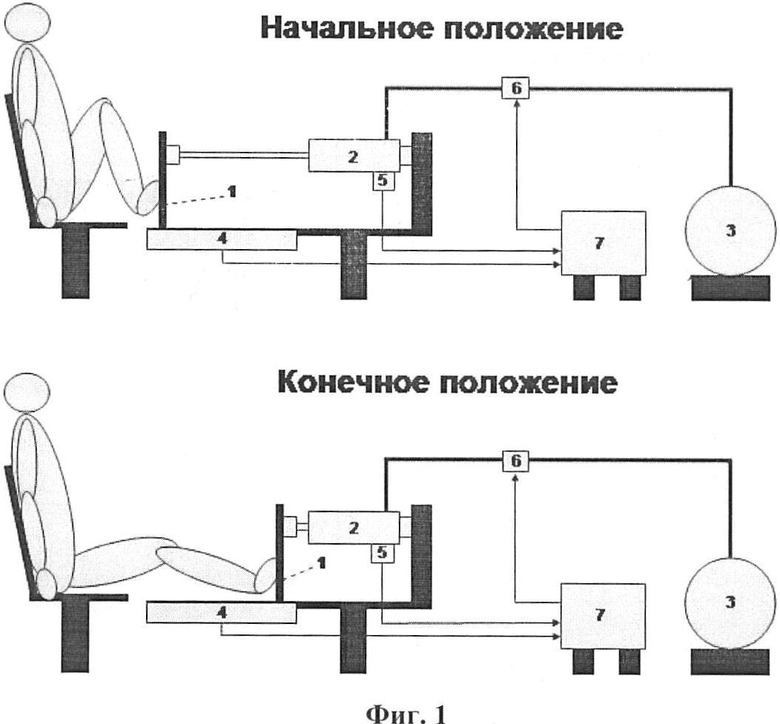
На фиг.1 представлена структурная схема размещения узлов на тренажерах, реализующих поступательные движения, где 1 - платформа, 2 - пневмопривод, 3 - компрессор с ресивером, 4 - датчик угла и/или перемещения, 5 - датчики рабочего давления, 6 - пневмосистема, 7 - блок управления.
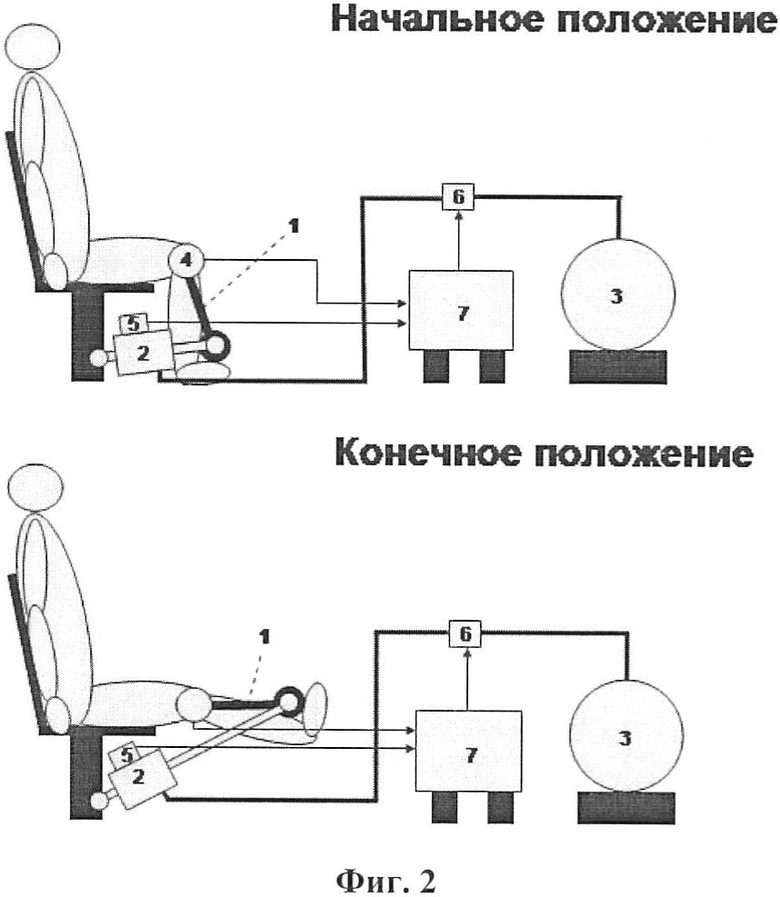
На фиг.2 представлена структурная схема размещения узлов на тренажерах реализующих вращательные движения.
На чертеже представлены устройства для тренировки мышц ног.
Сущность изобретения
В системе используется пневмопривод (2) в качестве силового нагрузочного блока, а также клапаны регулировки давления в пневмосистеме (6), состояние которых контролируются блоком управления (7), который, в свою очередь, оперируя информацией с датчиков рабочего давления (5) и положения (датчик угла или перемещения) (4) подвижной платформы (1), в каждый момент времени задает величину рабочего давления для реализации заданного режима тренировки. Сжатый воздух при этом нагнетают при помощи компрессора с ресивером (3).
Обеспечение переменной нагрузки по ходу движения достигается следующим образом. В управляющее устройство (7) вводится заранее запрограммированный профиль изменения нагрузки во время движения. Каждому показанию датчиков положения (4) соответствует определенная нагрузка (давление в пневмоцилиндре (2)), которая обеспечивается посредством клапанов сброса/накачки (6).
Обеспечение переменной нагрузки в разных фазах движения достигается за счет того, что управляющее устройство (7) имеет заранее запрограммированный режим со следующей логикой работы. В момент выполнения разгибания (перемещение подвижной платформы (1)) давление в пневмоцилиндре (2) остается постоянным (установленным заранее), при достижении подвижной платформы (1) определенного положения (заранее определенным для конкретного занимающегося) в пневмоцилиндр (2) накачивается дополнительное давление (уровень которого запрограммирован заранее) посредством клапанов сброса/накачки (6). В результате этого сгибание (перемещение подвижной платформы) осуществляется с большим давлением, которое также остается постоянным на всем протяжении сгибания. При достижении подвижной платформой исходного положения информация с датчика перемещения подает сигнал в интегрирующий блок, после чего давление вновь снижается посредством клапана (6). Затем цикл повторяется.
Обеспечение переменной нагрузки в разных движениях реализуется следующим образом. Управляющее устройство (7) имеет заранее запрограммированный режим со следующей логикой работы. Во время выполнения циклов сгибания/разгибания с постоянной (заранее установленной) нагрузкой, задаваемой пневмоцилиндром (2), измеряется скорость перемещения опорной платформы (1) посредством датчика перемещения (4). При этом испытуемому дается установка выполнять движение с максимально возможной для него скоростью. В процессе мышечного утомления скорость сокращения снижается, и в момент достижения определенного порога (заранее установленного) подается сигнал в блок управления (7). С него, в свою очередь, подается сигнал на клапан сброса/накачки (6), в результате работы которого давление снижается. Скорость мышечного сокращения несколько возрастает (ввиду снижения нагрузки), после чего вновь начинает снижаться (ввиду утомления), пока не достигнет порогового уровня и т.д. Сжатый воздух нагнетается посредством компрессора с ресивером (3). Поддержание постоянной скорости во время выполнения движения обеспечивается за счет того, что управляющее устройство (7) имеет заранее запрограммированный режим со следующей логикой работы. В алгоритме запрограммированы (с возможностью изменения) два скоростных порога: верхний и нижний. Тренирующемуся дается установка выполнять движения с максимально возможной для него скоростью. При достижении верхнего порога скорости от датчика положения (4) подается сигнал для повышения давления на определенную величину (пропорциональную уровню превышения порога). При достижении нижнего порога скорости подается сигнал для снижения давления на определенную величину (пропорциональную уровню превышения порога). Сжатый воздух нагнетается посредством компрессора с ресивером (3).
Таким образом, предложенное устройство позволяет реализовывать любой алгоритм изменения нагрузки во времени, в том числе с учетом зависимости силы сокращения мышцы от ее длины, эффектов утомления, травмобезопасности при тренировке в эксцентрическом режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЙ ТРЕНАЖЁР | 2016 |
|
RU2620488C1 |
| Устройство для тренировки мышц ног | 2019 |
|
RU2706437C1 |
| СПОСОБ И ВЕЛОТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ МЫШЦ НОГ В ЭКСЦЕНТРИЧЕСКОМ РЕЖИМЕ С ПРИНУДИТЕЛЬНЫМ ДОЗИРОВАНИЕМ НАГРУЗКИ | 2007 |
|
RU2334536C1 |
| ТЕЖЕЛОАТЛЕТИЧЕСКИЙ ТРЕНАЖЁР ДВОЙНОГО ДЕЙСТВИЯ | 2017 |
|
RU2662627C1 |
| Роботизированное кресло-тренажер | 2024 |
|
RU2837297C1 |
| Способ организации тренировочного процесса и система для его осуществления | 2020 |
|
RU2733870C1 |
| ТРЕНАЖЕР ДЛЯ ВЫПОЛНЕНИЯ ПОЛЬЗОВАТЕЛЕМ СИЛОВЫХ ФИЗИЧЕСКИХ УПРАЖНЕНИЙ | 2011 |
|
RU2574981C2 |
| СПОСОБ ФУНКЦИОНАЛЬНОЙ ТРЕНИРОВКИ ДЛЯ РАЗВИТИЯ ФИЗИЧЕСКИХ КАЧЕСТВ ЧЕЛОВЕКА | 2014 |
|
RU2551925C1 |
| УНИВЕРСАЛЬНЫЙ СПОРТИВНЫЙ ТРЕНАЖЕР КОМЛЕВА | 2012 |
|
RU2494783C1 |
| СПОСОБ ТРЕНИРОВКИ ГРЕБЦОВ И ТРЕНАЖЕР-ЭРГОМЕТР ДЛЯ АКАДЕМИЧЕСКОЙ ГРЕБЛИ | 1999 |
|
RU2162003C1 |
Способ тренировки мышц, при котором во время выполнения движений пользователем изменяют тренировочную нагрузку, изменение тренировочной нагрузки осуществляют с помощью силового блока, управляющего устройства, которое снабжено программой, соответствующей профилю изменения нагрузки, и датчиков положения перемещающейся под воздействием сокращения и растягивания мышц пользователя рабочей платформы, причем каждому показанию датчиков соответствует определенная нагрузка силового нагрузочного блока, при этом движения пользователя выполняются с максимально возможной скоростью, а алгоритм программы включает с возможностью изменения два скоростных порога, верхний, при движении которого от датчика положения подается сигнал для повышения нагрузки на величину, пропорциональную уровню превышения порога, и нижний, при достижении которого подается сигнал для снижения нагрузки на величину, пропорциональную уровню превышения порога. Использование данного способа и системы позволяет реализовать любой алгоритм изменения нагрузки во времени, в том числе с учетом зависимости силы сокращения мышцы от ее длины, утомления, травмобезопасность при тренировке в эксцентрическом режиме. 2 н. и 5 з.п. ф-лы, 2 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 4586706 А, 06.05.1986 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ упреждающей защиты водного объекта от загрязнения жидкими углеводородами | 2016 |
|
RU2607396C1 |
| Устройство для тренировки мышц ног | 1990 |
|
SU1755833A1 |
| Тренажерное устройство | 1980 |
|
SU993962A1 |

