Область техники
Настоящее изобретение относится к транспортному средству и способу управления транспортным средством.
Уровень техники
Одна предложенная конструкция транспортного средства имеет планетарный зубчатый механизм, соединенный с двигателем, первым электродвигателем и осью, и второй электродвигатель, соединенный с осью (см., например, опубликованную выложенную заявку на патент Японии №H09-308012). В этом транспортном средстве, имеющем известную из уровня техники конструкцию, мощность двигателя, приводимого в движение в эффективной точке привода, подвергается преобразованию крутящего момента посредством планетарного зубчатого механизма и двух электродвигателей и передается на ось для повышения общего энергетического кпд транспортного средства.
Краткое описание изобретения
В обычном транспортном средстве, оборудованном ступенчатой автоматической трансмиссией, которая преобразует мощность двигателя, когда тот имеет выбранную доступную скорость, и подает преобразованную мощность на ось, характер работы двигателя изменяется в ответ на изменение скорости автоматической трансмиссии, что дает водителю надлежащее ощущение переключения передач. В транспортном средстве, известном из уровня техники, двигатель приводят в движение в произвольной точке привода независимо от положения механизма переключения передач. Таким образом, двигатель может приводиться в движение без изменения точки привода независимо от изменения положения механизма переключения передач. Водитель, привыкший испытывать ощущение переключения передач в ступенчатой автоматической трансмиссии, соответственно, испытает ощущение, будто что-то не так.
Таким образом, транспортное средство и способ управления транспортным средством согласно изобретению решают задачу обеспечения водителя соответствующим ощущением переключения передач в ответ на изменение положения механизма переключения передач. Транспортное средство и способ управления транспортным средством согласно изобретению решают также задачу обеспечения водителя соответствующим ощущением переключения передач в ответ на изменение положения механизма переключения передач и препятствования чрезмерному заряду или разряду аккумуляторной батареи.
По меньшей мере, часть вышеперечисленных и других связанных с этим задач решается посредством создания транспортного средства и способа управления транспортным средством согласно изобретению, имеющим описанные ниже конфигурации.
Настоящее изобретение направлено на создание транспортного средства, снабженного двигателем внутреннего сгорания, блоком передачи мощности и электродвигателем, причем блок передачи мощности передает, по меньшей мере, часть выходной мощности двигателя внутреннего сгорания, который приводится в движение в произвольной точке привода независимо от положения механизма переключения передач, а электродвигатель выполнен с возможностью подачи мощности на ось. Транспортное средство включает в себя модуль установки требуемого приводного усилия, который устанавливает требуемое приводное усилие, которое должно быть подано на ось; модуль установки эффективной точки привода, который в случае отсутствия изменения положения механизма переключения передач устанавливает эффективную точку привода в заданную точку привода, определяемую согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, а в случае изменения положения механизма переключения передач переводит эффективную точку привода в обновленную точку привода из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием; и модуль управления, который управляет двигателем внутреннего сгорания, блоком передачи мощности и электродвигателем для приведения в движение двигателя внутреннего сгорания в установленной эффективной точке привода и для обеспечения подачи приводного усилия, эквивалентного требуемому приводному усилию, на ось.
В случае отсутствия изменения положения механизма переключения передач транспортное средство согласно настоящему изобретению устанавливает эффективную точку привода в заданную точку привода, определяемую согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, которое, как установлено, должно подаваться на ось, и управляет двигателем внутреннего сгорания, блоком передачи мощности и электродвигателем для приведения в движение двигателя внутреннего сгорания в установленной эффективной точке привода и для обеспечения подачи на ось приводного усилия, эквивалентного требуемому приводному усилию. В то же время в случае изменения положения механизма переключения передач транспортное средство согласно настоящему изобретению устанавливает эффективную точку привода в обновленную точку привода, по меньшей мере, в соответствии с изменением скорости вращения из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, и управляет двигателем внутреннего сгорания, блоком передачи мощности и электродвигателем для приведения в движение двигателя внутреннего сгорания в установленной эффективной точке привода и для обеспечения подачи на ось приводного усилия, эквивалентно требуемому приводному усилию. В ответ на изменение положения механизма переключения передач изменяется скорость вращения двигателя внутреннего сгорания, создавая у водителя ощущение переключения передач. Естественно, водитель испытывает странное ощущение, когда при активном изменении водителем положения механизма переключения передач не создается ощущения переключения передач. Предполагается, что изменение скорости вращения не позволит создать у водителя ощущение, будто что-то не так.
В одном предпочтительном варианте осуществления изобретения транспортное средство может дополнительно включать в себя механизм изменения положения механизма переключения передач, который изменяет положение механизма переключения передач в соответствии со степенью нажатия водителем на педаль акселератора и скоростью транспортного средства. Ожидается, что эта конструкция обеспечивает водителя надлежащим ощущением переключения передач, которое сходно с привычным ощущением в обычном транспортном средстве, оснащенным ступенчатой автоматической трансмиссией. В этом варианте осуществления механизм изменения положения механизма переключения передач может изменять положение механизма переключения передач в соответствии со скоростью транспортного средства, когда водитель нажимает на педаль акселератора на или свыше установленного первого уровня.
В другом предпочтительном варианте осуществления изобретения транспортное средство может дополнительно включать в себя первый механизм изменения положения механизма переключения передач, который изменяет положение механизма переключения передач посредством изменения водителем положения механизма переключения передач; и второй механизм изменения положения механизма переключения передач, который изменяет положение механизма переключения передач в соответствии со степенью нажатия водителем на педаль акселератора и скоростью транспортного средства независимо от изменения водителем положения механизма переключения передач. Модуль установки эффективной точки привода в ответ на изменение положения механизма переключения передач первым механизмом изменения положения механизма переключения передач может установить эффективную точку привода в обновленную точку привода, по меньшей мере, в соответствии с изменением скорости вращения до первой скорости из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, и в ответ на изменение положения механизма переключения передач вторым механизмом изменения положения механизма переключения передач может устанавливать эффективную точку привода в обновленную точку привода, по меньшей мере, в соответствии с изменением скорости вращения до второй скорости, которая отличается от первой скорости, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием. Соответственно, водитель получает надлежащее ощущение переключения передач, соответствующее причине переключения передачи, то есть либо изменению положения механизма переключения передач посредством изменения водителем положения механизма переключения передач, либо изменению положения механизма переключения передач в соответствии со степенью нажатия водителем на педаль акселератора и скоростью транспортного средства. В этом случае вторая скорость может быть меньше первой скорости. Эта конструкция позволяет водителю испытывать надлежащее ощущение переключения передач при изменении положения механизма переключения передач, когда водитель производит изменение положения механизма переключения передач. Если изменение положения механизма переключения передач вызывается изменением степени открытия акселератора и скоростью транспортного средства, то эта конструкция не дает водителю испытывать странное ощущение от неожиданного изменения скорости.
В одном предпочтительном варианте осуществления транспортного средства согласно настоящему изобретению в ответ на изменение положения механизма переключения передач модуль установки эффективной точки привода может устанавливать эффективную точку привода в обновленную точку привода, по меньшей мере, в соответствии с изменением скорости вращения, соответствующей измененному положению механизма переключения передач, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием. Эта конструкция позволяет водителю испытать надлежащее ощущение переключения передач в соответствии с измененным положением механизма переключения передач.
В другом предпочтительном варианте осуществления транспортного средства согласно изобретению в ответ на изменение положения механизма переключения передач на более высокую передачу модуль установки эффективной точки привода может установить эффективную точку привода в обновленную точку привода в соответствии с уменьшением скорости вращения из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием. Эта конструкция позволяет водителю получить надлежащее ощущение переключения передач в ответ на изменение положения механизма переключения передач на более высокую передачу. В этом варианте осуществления в ответ на изменение положения механизма переключения передач на более высокую передачу модуль установки эффективной точки привода может ограничить максимальную скорость вращения двигателя внутреннего сгорания и установить при уменьшении скорости вращения эффективную точку привода в обновленную точку привода в пределах ограниченной максимальной скорости вращения двигателя внутреннего сгорания из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием.
В еще одном предпочтительном варианте осуществления транспортного средства согласно изобретению в ответ на изменение положения механизма переключения передач на более низкую передачу модуль установки эффективной точки привода может установить эффективную точку привода в обновленную точку привода при увеличении скорости вращения из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием. Эта конструкция позволяет водителю получить надлежащее ощущение переключения передач в ответ на изменение положения механизма переключения передач на более низкую передачу.
В другом предпочтительном варианте применения транспортного средства согласно изобретению модуль установки эффективной точки привода может постепенно приближать эффективную точку привода к заданной точке привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, с течением времени, прошедшего с момента изменения положения механизма переключения передач. Эта конструкция позволяет постепенно приближать точку привода двигателя внутреннего сгорания к заданной точке привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, с течением времени, прошедшего с момента изменения положения механизма переключения передач.
В еще одном предпочтительном варианте осуществления изобретения транспортное средство дополнительно включает в себя аккумуляторную батарею, которая может принимать электрическую энергию от блока передачи мощности и электродвигателя и подавать электрическую энергию на блок передачи мощности и электродвигатель. Блок передачи мощности может быть механизмом приема-подачи электрической энергии и механической энергии (электрической и механической мощностей), который соединен с двигателем внутреннего сгорания и с осью и подает, по меньшей мере, часть выходной мощности двигателя внутреннего сгорания на ось посредством приема и подачи электрической энергии и механической энергии. В этом варианте осуществления в ответ на изменение положения механизма переключения передач на более высокую передачу модуль установки эффективной точки привода может установить эффективную точку привода в обновленную точку привода при уменьшении скорости вращения, снизившейся на заранее установленную величину, соответствующую первому уровню изменений в пределах входного предела аккумулятора, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием. Эта конструкция эффективно препятствует чрезмерному заряду аккумулятора в процессе изменения точки привода в ответ на изменение положения механизма переключения передач на более высокую передачу. В этом варианте осуществления в ответ на изменение положения механизма переключения передач на более низкую передачу модуль установки эффективной точки привода может установить эффективную точку привода в обновленную точку привода при увеличении скорости вращения, увеличившейся на заранее установленную величину, соответствующую второму уровню изменений в пределах выходного предела аккумулятора, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием. Эта конструкция эффективно препятствует чрезмерному разряду аккумулятора в процессе изменения точки привода в ответ на изменение положения механизма переключения передач на более низкую передачу.
В транспортном средстве согласно изобретению один предпочтительный пример блока передачи мощности может представлять собой непрерывно регулируемую передачу.
Настоящее изобретение также направлено на создание способа управления транспортным средством, оснащенным двигателем внутреннего сгорания, блоком передачи мощности и электродвигателем, причем блок передачи мощности передает, по меньшей мере, часть выходной мощности двигателя внутреннего сгорания, который приводится в движение в произвольной точке привода независимо от положения механизма переключения передач, на ось, а электродвигатель подает мощность на ось. Согласно способу (a) в случае отсутствия изменения положения механизма переключения передач устанавливают эффективную точку привода в заданную точку привода, определяемую согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, которое, как установлено, должно подаваться на ось, и управляют двигателем внутреннего сгорания, блоком передачи мощности и электродвигателем для приведения в движение двигателя внутреннего сгорания в установленной точке привода и для обеспечения подачи на ось приводного усилия, эквивалентного требуемому приводному усилию; и (b) в случае изменения положения механизма переключения передач устанавливают эффективную точку привода в обновленную точку привода, по меньшей мере, в соответствии с изменением скорости вращения из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, и управляют двигателем внутреннего сгорания, блоком передачи мощности и электродвигателем для приведения в движение двигателя внутреннего сгорания в установленной эффективной точке привода и для обеспечения подачи на ось приводного усилия, эквивалентного требуемому приводному усилию.
В случае отсутствия изменения положения механизма переключения передач способ управления транспортным средством согласно изобретению устанавливает эффективную точку привода в заданную точку привода, определяемую согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, которое, как установлено, должно подаваться на ось, и управляет двигателем внутреннего сгорания, блоком передачи мощности и электродвигателем для приведения в движение двигателя внутреннего сгорания в установленной эффективной точке привода и для обеспечения подачи на ось приводного усилия, эквивалентного требуемому приводному усилию. С другой стороны, в случае изменения положения механизма переключения передач способ управления транспортным средством согласно изобретению устанавливает эффективную точку привода в обновленную точку привода, по меньшей мере, в соответствии с изменением скорости вращения из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, и управляет двигателем внутреннего сгорания, блоком передачи мощности и электродвигателем для приведения в движение двигателя внутреннего сгорания в установленной эффективной точке привода и для обеспечения подачи на ось приводного усилия, эквивалентного требуемому приводному усилию. В ответ на изменение положения механизма переключения передач изменяется скорость вращения двигателя внутреннего сгорания, что дает водителю надлежащее ощущение переключения передач. Водитель естественно испытывает странное ощущение, когда отсутствует ощущение изменения передач при активном изменении водителем положения механизма переключения передач. Предполагается, что изменение скорости вращения не позволяет водителю испытать ощущение, будто что-то не так.
В способе управления транспортным средством согласно изобретению этап (b) в ответ на изменение положения механизма переключения передач посредством изменения водителем положения механизма переключения передач может установить эффективную точку привода в обновленную точку привода, по меньшей мере, в соответствии с изменением скорости вращения до первой скорости из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, и в ответ на изменение положения механизма переключения передач в соответствии со степенью нажатия водителем на педаль акселератора и скоростью транспортного средства независимо от изменения водителем положения механизма переключения передач может установить эффективную точку привода в обновленную точку привода, по меньшей мере, в соответствии с изменением скорости вращения до второй скорости, которая отличается от первой скорости, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием. Кроме того, этап (b) в ответ на изменение положения механизма переключения передач на более высокую передачу может установить эффективную точку привода в обновленную точку привода в соответствии с уменьшением скорости вращения из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием. Кроме того, этап (b) в ответ на изменение положения механизма переключения передач может установить эффективную точку привода в обновленную точку привода в соответствии с увеличением скорости вращения из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием. Кроме того, этап (b) может постепенно приближать эффективную точку привода к заданной точке привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, с течением времени после изменения положения механизма переключения передач.
Краткое описание чертежей
Фиг.1 - схематичная иллюстрация конфигурации гибридного транспортного средства согласно одному варианту осуществления изобретения;
Фиг.2 - блок-схема, изображающая программу управления приводом, выполняемую гибридным электронным блоком управления, входящим в состав гибридного транспортного средства согласно варианту осуществления настоящего изобретения;
Фиг.3 - один пример схемы определения требуемого крутящего момента;
Фиг.4 - иллюстрация линии эффективной работы двигателя для установки требуемой скорости вращения Ne* и требуемого крутящего момента Te*;
Фиг.5 - номограмма, иллюстрирующая динамику соотношения скорости и крутящего момента для соответствующих вращающихся элементов, входящих в состав комплексного механизма распределения мощности, в гибридном транспортном средстве согласно варианту осуществления изобретения;
Фиг.6 - блок-схема, подобная блок-схеме процесса обновления заданной скорости вращения при переключении на более высокую передачу, выполняемого гибридным электронным блоком управления на этапе S170 программы управления приводом с фиг.2;
Фиг.7 - блок-схема, подобная блок-схеме процесса обновления заданной скорости вращения при переключении на более низкую передачу, выполняемого гибридным электронным устройством управления на этапе S180 программы управления приводом с фиг.2;
Фиг.8 - иллюстрация изменения во времени скорости транспортного средства V, положения механизма переключения передач SP и скорости вращения Ne двигателя в ответ на переключение на более высокую передачу;
Фиг.9 - блок-схема, иллюстрирующая модифицированную последовательность процесса обновления заданной скорости вращения при переключении на более высокую передачу, выполняемого гибридным электронным блоком управления;
Фиг.10 - блок-схема, иллюстрирующая другую модифицированную последовательность процесса обновления заданной скорости вращения при переключении на более высокую передачу, выполняемого гибридным электронным блоком управления;
Фиг.11 - блок-схема, иллюстрирующая модифицированную последовательность процесса обновления заданной скорости вращения при переключении на более низкую передачу, выполняемого гибридным электронным блоком управления;
Фиг.12 - иллюстрация изменения во времени скорости транспортного средства V, положения механизма переключения передач SP и скорости вращения Ne двигателя в ответ на переключение на более низкую передачу;
Фиг.13 - блок-схема, иллюстрирующая еще одну модифицированную последовательность процесса обновления заданной скорости вращения при переключении на более высокую передачу, выполняемого гибридным электронным блоком управления;
Фиг.14 - иллюстрация изменения во времени положения механизма переключения передач SP и скорости вращения Ne двигателя в ответ на переключение на более высокую передачу;
Фиг.15 - блок-схема, иллюстрирующая измененную последовательность программы управления приводом, выполняемой гибридным электронным блоком управления;
Фиг.16 - блок-схема, подробно иллюстрирующая процесс обновления точки привода при переключении на более высокую передачу, выполняемый гибридным электронным блоком управления на этапе S170b при модифицированной программе управления приводом с фиг.15;
Фиг.17 - иллюстрация изменения точки привода двигателя в ответ на переключение на более высокую передачу;
Фиг.18 - схематичная иллюстрация конфигурации одного гибридного транспортного средства в качестве одного модифицированного примера;
Фиг.19 - схематичная иллюстрация конфигурации еще одного гибридного транспортного средства в качестве еще одного модифицированного примера; и
Фиг.20 - схематичная иллюстрация конфигурации еще одного гибридного транспортного средства в качестве еще одного модифицированного примера.
Наилучшие варианты осуществления изобретения
Один вариант выполнения изобретения обсуждается ниже в качестве предпочтительного варианта осуществления. На фиг.1 схематично показана конфигурация гибридного транспортного средства 20 в одном варианте осуществления изобретения. Как показано на фиг.1, гибридное транспортное средство 20 этого варианта осуществления включает в себя двигатель 22, три механизма 30 объединения и распределения мощности при помощи валов, которые соединены с коленчатым валом 26 или выходным валом двигателя 22 через демпфер 28, электродвигатель MG1, который соединен с механизмом 30 объединения и распределения мощности и вырабатывающий энергию, электродвигатель MG2, который соединен с механизмом 30 объединения и распределения мощности через редуктор 35, и гибридный электронный блок 70 управления, который управляет работой всего гибридного транспортного средства 20.
Двигатель 22 представляет собой двигатель внутреннего сгорания, который использует для выработки энергии углеводородное топливо, такое как бензин или дизельное топливо. Электронное устройство 24 управления двигателя (далее именуемое ЭУУ 24 двигателя) принимает сигналы от различных датчиков, которые определяют эксплуатационные режимы двигателя 22 и осуществляют управление работой двигателя 22, например управление впрыском топлива, управление зажиганием и регулирование притока воздуха. ЭУУ 24 двигателя связывается с гибридным электронным блоком 70 управления для управления работой двигателя 22 в ответ на управляющие сигналы, переданные от гибридного электронного блока 70 управления, и при этом выдает данные, относящиеся к эксплуатационным режимам двигателя 22, гибридному электронному блоку 70 управления в соответствии с требованиями.
Механизм 30 распределения и объединения мощности имеет солнечную шестерню 31, которая является шестерней с наружным зацеплением, венцовую шестерню 32, которая является шестерней с внутренним зацеплением и расположена концентрически относительно солнечной шестерни 31, множество сателлитов 33, которые находятся в зацеплении с солнечной шестерней 31 и с венцовой шестерней 32, и крепежный элемент 34, который удерживает множество сателлитов 33 таким образом, что обеспечивает их свободное обращение и вращение на соответствующих осях. Другими словами, механизм 30 распределения и объединения мощности сконструирован в виде планетарного зубчатого механизма, который учитывает дифференциальные движения солнечной шестерни 31, венцовой шестерни 32 и крепежного элемента 34 как вращательных элементов. В механизме 30 распределения и объединения мощности крепежный элемент 34, солнечная шестерня 31 и венцовая шестерня соединены соответственно с коленчатым валом 26 двигателя 22, электродвигателем MG1 и редуктором через вал 32a венцовой шестерни 35. Когда электродвигатель MG1 выполняет функцию генератора, мощность, поступающая от двигателя 22 через крепежный элемент 34, распределяется между солнечной шестерней 31 и венцовой шестерней 32 в соответствии с передаточным отношением. В то же время, когда электродвигатель MG1 выполняет функцию электродвигателя, мощность, поступающая от двигателя 22 через крепежный элемент 34, объединяется с мощностью, поступающей от электродвигателя MG1 через солнечную шестерню 31, и объединенная мощность подается на венцовую шестерню 32. Таким образом, мощность, подаваемая на венцовую шестерню 32, в конечном счете передается посредством зубчатого механизма 37, дифференциала 38 и оси 36 от вала 32a на ведущие колеса 39a и 39b.
Электродвигатели MG1 и MG2 выполнены в виде известных синхронных электродвигателей-генераторов, которые можно использовать как в качестве генератора, так и в качестве электродвигателя. Электродвигатели MG1 и MG2 передают электрическую энергию аккумуляторной батарее 50 и от аккумуляторной батареи 50 через инверторы 41 и 42. Электропровода 54, соединяющие аккумуляторную батарею 50 с инверторами 41 и 42, выполнены в виде обычных положительной шины и отрицательной шины, являющихся общими для инверторов 41 и 42. Такое соединение позволяет потреблять электроэнергию, выработанную одним из электродвигателей MG1 и MG2, другим электродвигателем MG2 или MG1. Таким образом, аккумуляторная батарея 50 может заряжаться избыточной электрической энергией, вырабатываемой любым из электродвигателей MG1 и MG2, и разряжаться для восполнения недостаточной электрической энергии. Аккумуляторная батарея 50 ни заряжается, ни разряжается, когда электрическая энергия, потребляемая и выдаваемая электродвигателями MG1 и MG2, находится в равновесии. Оба электродвигателя MG1 и MG2 приводятся в движение и управляются электронным устройством 40 управления электродвигателей (далее именуемое ЭУУ 40 электродвигателей). ЭУУ 40 электродвигателей принимает сигналы, требуемые для приведения в движение и управления электродвигателями MG1 и MG2, например сигналы, представляющие угловые положения роторов в электродвигателях MG1 и MG2, от датчиков 43 и 44 определения углового положения и сигналы, представляющие фазные токи, которые следует подать на электродвигатели MG1 и MG2, от датчиков тока (не показаны). ЭУУ 40 электродвигателей выдает коммутационные управляющие сигналы на инверторы 41 и 42. ЭУУ 40 электродвигателей выполняет программу вычисления скорости вращения (не показана) для вычисления скоростей вращения Nm1 и Nm2 роторов электродвигателей MG1 и MG2 на основании сигналов, поступающих от датчиков 43 и 44 определения углового положения. ЭУУ 40 электродвигателей устанавливает связь с гибридным электронным блоком 70 управления для приведения в движение и управление электродвигателями MG1 и MG2 в ответ на управляющие сигналы, принятые от гибридного электронного блока 70 управления, и при этом выдает данные, относящиеся к режимам работы электродвигателей MG1 и MG2, гибридному электронному устройству 70 управления в соответствии с требованиями.
Аккумуляторная батарея 50 находится под управлением электронного устройства управления 52 аккумуляторной батареи (далее именуемого ЭУУ 52 аккумуляторной батареи). ЭУУ 52 аккумуляторной батареи принимает сигналы, требуемые для управления аккумуляторной батареей 50, например межполюсное напряжение Vb от датчика напряжения (не показан), расположенного между клеммами аккумуляторной батареи 50, ток заряда-разряда от датчика тока (не показан), расположенного на электропроводе 54, соединенном с клеммой аккумуляторной батареи 50, и температуру аккумуляторной батареи Tb от температурного датчика (не показан), прикрепленного к аккумуляторной батарее 50. ЭУУ 52 аккумуляторной батареи выдает данные о состоянии аккумуляторной батареи 50 гибридному электронному блоку 70 управления посредством связи в соответствии с требованиями. Для управления аккумуляторной батареей 50 ЭУУ 52 аккумуляторной батареи вычисляет остаточный уровень заряда или текущее состояние заряда (СЗ) аккумуляторной батареи 50 посредством интегрирования тока заряда-разряда, измеренного датчиком тока (не показан).
Гибридный электронный блок 70 управления выполнен в виде микропроцессора, включающего в себя ЦПУ 72, ПЗУ 74, которое хранит программы обработки, ОЗУ 76, которое временно хранит данные, входной и выходной порты (не показаны) и порт связи. Гибридный электронный блок 70 управления принимает через входной порт сигнал зажигания от замка 80 зажигания, положение механизма переключения передач ПП или текущее положение рычага 81 переключения передач от датчика 82 положения механизма переключения передач, степень Acc открытия акселератора или степень нажатия водителем на педаль 83 акселератора от датчика 84 положения педали акселератора, положение педали тормоза ПТ или степень нажатия водителем на педаль 85 тормоза от датчика 86 положения педали тормоза и скорость V транспортного средства от датчика 88 скорости транспортного средства. Положение механизма переключения передач ПП, определяемое положением рычага 81 переключения передач, выбирается из доступных положений передач, а именно положение переднего хода для общего переднего хода, положение заднего хода для заднего хода, положение торможения для усиления силы торможения в состоянии отпущенной педали акселератора по сравнению с положением переднего хода, стояночное положение для блокировки коробки передач на стоянке, нейтральное положение для передачи в нейтральное положение и диапазон последовательного переключения передач. Диапазон последовательного переключения передач в этом варианте осуществления включает в себя пять последовательных положений передач от ′S1′ до ′S5′. В ответ на изменение водителем положения рычага 81 переключения передач положение передачи переключается либо на более высокую передачу, либо на более низкую передачу в соответствии с диапазоном последовательного переключения передач. В случае, когда степень Acc открытия акселератора достигает или превышает заданный верхний предел, например 90%, положение передачи переключается на более высокую передачу в соответствии с диапазоном последовательного переключения передач при изменении скорости V транспортного средства независимо от изменения водителем положения рычага 81 переключения передач. В случае, когда степень Acc открытия акселератора не превышает заданного нижнего предела, например 10%, положение передачи переключается на более низкую передачу в соответствии с диапазоном последовательного переключения передач при изменении скорости V транспортного средства независимо от изменения водителем положения рычага 81 переключения передач. Гибридный электронный блок 70 управления устанавливает связь с ЭУУ 24 двигателя, ЭУУ 40 электродвигателей и ЭУУ 52 аккумуляторной батареи через порт связи для приема и отправления различных управляющих сигналов и данных от и к ЭУУ 24 двигателя, ЭУУ 40 электродвигателей и ЭУУ 52 аккумуляторной батареи, как указано выше.
Гибридное транспортное средство 20 согласно этому варианту осуществления, имеющее вышеуказанную конструкцию, определяет требуемый крутящий момент, который должен подаваться на вал 32a венцовой шестерни или на ведущий вал, связанный с ведущими колесами 39a и 39b через ось 36, на основании данной скорости V транспортного средства и данной степени Acc открытия акселератора транспортного средства (эквивалентного степени нажатия водителем педали 83 акселератора) и приводит в движение и управляет двигателем 22 и электродвигателями MG1 и MG2 для обеспечения подачи на вал 32a венцовой шестерни требуемой мощности, эквивалентной требуемому крутящему моменту. Существует несколько режимов управления приводом для двигателя 22 и электродвигателей MG1 и MG2. В режиме привода с преобразованием крутящего момента в случае, когда двигатель 22 приводится в движение и управляется таким образом, чтобы выдавать требуемый уровень мощности, соответствующий требуемой мощности, электродвигатели MG1 и MG2 приводятся в движение и управляются таким образом, чтобы вся выходная мощность двигателя 22 подвергалась преобразованию крутящего момента механизмом 30 объединения и распределения мощности и электродвигателями MG1 и MG2 и подавалась на вал 32a венцовой шестерни. В режиме привода с зарядом-разрядом двигатель 22 приводится в движение и управляется таким образом, чтобы выдавать требуемый уровень мощности, соответствующей сумме требуемой мощности и электрической мощности, используемой для заряда аккумуляторной батареи 50 или извлекаемой из аккумуляторной батареи 50. Электродвигатели MG1 и MG2 приводятся в движение и управляются таким образом, чтобы вся выходная мощность двигателя 22 или ее часть, эквивалентная требуемой мощности с учетом заряда или разряда аккумуляторной батареи 50, подвергалась преобразованию крутящего момента механизмом 30 объединения и распределения энергии и электродвигателями MG1 и MG2 и подавалась на вал 32a венцовой шестерни. В режиме привода с использованием электродвигателя электродвигатель MG2 приводится в движение и управляется таким образом, чтобы обеспечить подачу требуемого уровня мощности, соответствующего требуемой мощности, на вал 32a венцовой шестерни, когда двигатель 22 останавливается.
В описании рассматривается работа гибридного транспортного средства 20 согласно этому варианту осуществления, имеющего приведенную выше конфигурацию, в частности последовательность управляющих действий, в ответ на переключение на более высокую или более низкую передачу в диапазоне последовательного переключения передач механизма переключения передач. На фиг.2 приведена блок-схема программы управления приводом, выполняемой гибридным электронным блоком 70 управления. Эта программа управления приводом выполняется многократно через заданные интервалы времени, например через каждые несколько миллисекунд, в диапазоне последовательного переключения передач механизма переключения передач ПП.
В программе управления приводом ЦПУ 72 гибридного электронного блока 70 управления сначала принимает различные данные, требуемые для управления, а именно степень Acc открытия акселератора от датчика 84 положения педали акселератора, скорость V транспортного средства от датчика 88 скорости транспортного средства, положение механизма переключения передач ПП от датчика 82 положения механизма переключения передач, скорости Nm1 и Nm2 вращения электродвигателей MG1 и MG2, требуемую мощность Pb* заряда-разряда, подаваемую на аккумуляторную батарею 50 или извлекаемую из аккумуляторной батареи 50, и входной предел Win и выходной предел Wout аккумуляторной батареи 50 (этап S100). Скорости Nm1 и Nm2 вращения электродвигателей MG1 и MG2 рассчитываются на основе угловых положений соответствующих роторов в электродвигателях MG1 и MG2, определенных датчиками 43 и 44 определения углового положения и принятых от ЭУУ 40 электродвигателей посредством связи. Требуемая мощность Pb* заряда-разряда для аккумуляторной батареи устанавливается на основе заряженности аккумуляторной батареи 50 и принимается от ЭУУ 52 аккумуляторной батареи посредством связи. Входной предел Win и выходной предел Wout аккумуляторной батареи 50 устанавливаются на основе температуры Tb аккумуляторной батареи и заряженности и принимаются от ЭУУ 52 аккумуляторной батареи посредством связи.
После ввода данных ЦПУ 72 устанавливает требуемый крутящий момент Tr*, который должен подаваться на вал 32a венцовой шестерни или на ведущий вал, связанный с ведущими колесами 39a и 39b через ось 36, и требуемую мощность Pe* двигателя, которая должна подаваться от двигателя 22, на основе введенной степени Acc открытия акселератора и введенной скорости V транспортного средства (этап S110). Конкретная процедура установки крутящего момента Tr* в этом варианте осуществления заключается в предварительном сохранении в ПЗУ 74 изменений требуемого крутящего момента Tr* в зависимости от степени Acc открытия акселератора и скорости V транспортного средства в виде графика определения требуемого крутящего момента и считывании с графика требуемого крутящего момента Tr*, соответствующего данной степени Acc открытия акселератора и данной скорости V транспортного средства. Один пример графика определения требуемого крутящего момента приведен на фиг.3. Требуемая мощность Pe* двигателя рассчитывается как сумма произведения требуемого крутящего момента Tr* и скорости Nr вращения вала 32a венцовой шестерни, требуемой мощности Pb* заряда-разряда аккумуляторной батареи 50 и потенциальных потерь. Скорость Nr вращения вала 32a венцовой шестерни определяется посредством деления скорости Nm2 вращения электродвигателя MG2 на передаточное отношение Gr редуктора 35 или посредством умножения скорости V транспортного средства на коэффициент k пересчета.
Затем ЦПУ 72 устанавливает требуемую скорость Ne* вращения и требуемый крутящий момент Te* двигателя 22, соответствующие требуемой мощности Pe* двигателя (этап S120). Требуемая скорость Ne* вращения и требуемый крутящий момент Te* двигателя 22 определяются в соответствии с линией эффективной работы, обеспечивающей эффективную работу двигателя 22, и кривой требуемой мощности Pe* двигателя. На фиг.4 приведена линия эффективной работы двигателя 22, позволяющая определить требуемую скорость Ne* вращения и требуемый крутящий момент Te*. Как ясно видно на фиг.4, требуемая скорость Ne* вращения и требуемый крутящий момент Te* находятся на пересечении линии эффективной работы и кривой постоянной потребляемой мощности Pe* двигателя (Pe*=Ne*×Te*).
Затем ЦПУ 72 определяет требование для процесса обновления требуемой скорости вращения при переключении на более высокую передачу и требование для процесса обновления требуемой скорости вращения при переключении на более низкую передачу (этапы S130-S160). Для определения требования для процесса обновления требуемой скорости вращения при переключении на более высокую передачу процедура согласно этому варианту осуществления предусматривает последовательное определение того, что флаг F1 равен "1" (этап S130) и что положение передачи в диапазоне последовательного переключения передач только что было переведено на более высокую передачу (этап S140). Для определения требования для процесса обновления требуемой скорости при переключении на более низкую передачу процедура согласно этому варианту осуществления предусматривает последовательное определение того, что флаг F2 равен "1" (этап S150) и что положение передачи в диапазоне последовательного переключения передач только что было переведено на более высокую передачу (этап S160). Начальное значение флага F1 равно "0", и оно устанавливается в "1" во время выполнения процесса обновления требуемой скорости вращения при переключении на более высокую передачу. Аналогично, начальное значение флага F2 равно "0", и оно устанавливается в "1" во время выполнения процесса обновления требуемой скорости вращения при переключении на более низкую передачу. Переключение на более высокую передачу, например из положения передачи "S3" в положение передачи "S4", или переключение на более низкую передачу, например из положения передачи "S4" в положение передачи "S3", определяется посредством сравнения между предыдущей установкой и текущей установкой введенного положения механизма переключения передач. Когда оба флага F1 и F2 равны "0" и не обнаружено ни переключения на более высокую передачу, ни переключения на более низкую передачу (этапы S130-S160), то отсутствуют требования для процесса обновления требуемой скорости вращения при переключении на более высокую передачу и для процесса обновления требуемой скорости вращения при переключении на более низкую передачу. В этом случае ЦПУ 72 вычисляет требуемую скорость Nm1* вращения электродвигателя MG1 из требуемой скорости Ne* вращения двигателя 22, установленной на этапе S120, скорости Nr (=Nm2/Gr) вала 32a венцовой шестерни, и передаточного отношения ρ механизма 30 объединения и распределения мощности согласно формуле (1), приведенной ниже, вычисляя при этом уставку крутящего момента Tm1* электродвигателя MG1 из вычисленной требуемой скорости Nm1* вращения и текущей скорости вращения Nm1 электродвигателя MG1 согласно формуле (2), приведенной ниже (этап S190):


Формула (1) является динамическим выражением сравнения вращающихся элементов, входящих в механизм 30 объединения и распределения мощности. На фиг.5 приведена номограмма, изображающая динамику соотношения крутящего момента и скорости вращения для соответствующих вращающихся элементов, входящих в состав механизма 30 объединения и распределения мощности. Левая ось "S" представляет скорость вращения солнечной шестерни 31, которая эквивалентна скорости Nm1 вращения электродвигателя MG1. Средняя ось "C" представляет скорость вращения крепежного элемента 34, которая эквивалентна скорости вращения Ne двигателя 22. Правая ось "R" представляет скорость Nr вращения венцовой шестерни 32 (вала 32a венцовой шестерни). Таким образом, требуемую скорость Nm1* вращения электродвигателя MG1 легко получить при помощи этой номограммы, представляющей динамику соотношения крутящего момента и скорости вращения. Управление приводом электродвигателя MG1 посредством установок крутящего момента Tm1* и требуемой скорости Nm1* вращения обеспечивает вращение двигателя 22 с требуемой скоростью Ne* вращения. Формула (2) является выражением сравнения управления с обратной связью для приведения в движение и вращения электродвигателя MG1 с требуемой скоростью Nm1* вращения. В приведенной выше формуле (2) "k1" во втором члене и "k2" в третьем члене в правой части формулы обозначают соответственно коэффициент передачи пропорционального и коэффициент передачи интегрального члена. Две направленные вверх толстые стрелки на оси "R" на фиг.5 обозначают соответственно крутящий момент, который передается непосредственно валу 32a венцовой шестерни, когда крутящий момент Te* подается от двигателя 22 в устойчивом режиме работы в определенной точке привода требуемой скорости Ne* вращения и требуемого крутящего момента Te*, и крутящий момент, который подается на вал 32a венцовой шестерни через редуктор 35, когда от электродвигателя MG2 подается крутящий момент Tm2*.
После вычисления требуемой скорости Nm1* вращения и установки крутящего момента Tm1* электродвигателя MG1 ЦПУ 72 вычисляет верхнее предельное значение Tmax крутящего момента и нижнее предельное значение Tmin крутящего момента как максимальный и минимальный крутящий моменты, подаваемые от электродвигателя MG2 согласно формулам (3) и (4), приведенным ниже (этап S200):


Верхнее предельное значение Tmax крутящего момента и нижнее предельное значение Tmin крутящего момента получаются соответственно посредством деления разности между входным пределом Win аккумуляторной батареи 50 и потребляемой мощностью (вырабатываемой мощностью) электродвигателя MG1, которая является произведением крутящего момента Tm1* и введенной текущей скорости Nm1 электродвигателя MG1, и разности между выходным пределом Wout аккумуляторной батареи 50 и потребляемой мощностью (вырабатываемой мощностью) электродвигателя MG1, умноженной на введенную текущую скорость Nm2 вращения двигателя MG2. Затем ЦПУ 72 вычисляет предварительный крутящий момент Tm2tmp электродвигателя, который должен подаваться от электродвигателя MG2, на основе требуемого крутящего момента Tr*, крутящего момента Tm1* электродвигателя MG1, передаточного отношения ρ механизма 30 объединения и распределения мощности и передаточного отношения Gr редуктора 35 согласно формуле (5), приведенной ниже (этап S210):

ЦПУ 72 ограничивает предварительный крутящий момент Tm2tmp электродвигателя диапазоном между вычисленным нижним предельным значением Tmin крутящего момента и верхним предельным значением Tmax крутящего момента для установления крутящего момента Tm2* электродвигателя MG2 (этап S220). Такая установка крутящего момента Tm2* электродвигателя MG2 устанавливает ограничение на требуемый крутящий момент Tr*, подаваемый на вал 32a венцовой шестерни, в диапазоне от входного предела Win до выходного предела Wout аккумуляторной батареи 50. Формулу (5) легко вывести из номограммы, изображенной на фиг.5.
ЦПУ 72 посылает требуемую скорость Ne* вращения и требуемый крутящий момент Te* двигателя 22 к ЭУУ 24 двигателя, а установки крутящих моментов Tm1* и Tm2* электродвигателей MG1 и MG2 к ЭУУ 40 электродвигателей (этап S230) и затем выходит из программы управления приводом. ЭУУ 24 электродвигателей принимает требуемую скорость Ne* вращения и требуемый крутящий момент Te* и выполняет управление непосредственным впрыском топлива и управление зажиганием для приведения в движение двигателя 22 в заданной точке привода требуемой скорости Ne* вращения и требуемого крутящего момента Te*. ЭУУ 40 электродвигателей принимает установки крутящих моментов Tm1* и Tm2* и выполняет управление переключением коммутационных элементов, входящих в соответствующие инверторы 41 и 42 для приведения в движение электродвигателя MG1 с установкой крутящего момента Tm1* и электродвигателя MG2 с установкой крутящего момента Tm2*.
В ответ на определение переключения на более высокую передачу на этапе S140 ЦПУ 72 выполняет процесс обновления требуемой скорости вращения при переключении на более высокую передачу (этап S170) и затем переходит к обработке вышеописанного этапа S190 и далее. Подробные сведения о процессе обновления требуемой скорости вращения при переключении на более высокую передачу на этапе S170 описаны со ссылкой на блок-схему, приведенную на фиг.6. В процессе обновления требуемой скорости вращения при переключении на более высокую передачу ЦПУ 72 сначала определяет флаг G, представляющий изменение требуемой скорости Ne* вращения двигателя 22 (этап S300). Когда флаг G на этапе S300 равен "0", ЦПУ 72 устанавливает для поправочной величины α заранее определенное опорное значение α1 (этап S310) и вычитает поправочное значение α из требуемой скорости Ne* вращения двигателя 22, установленной на этапе S120 в программе управления приводом, изображенной на фиг.2, для обновления требуемой скорости Ne* вращения двигателя 22 (этап S320). Затем ЦПУ 72 устанавливает для обоих флагов G и F1 значение, равное "1" (этапы S330 и S370), и завершает процесс обновления требуемой скорости вращения при переключении на более высокую передачу. Опорное значение α1 представляет степень уменьшения требуемой скорости Ne* вращения двигателя 22 и зависит от характеристик двигателя 22. Когда положение передачи в последовательности переключения передач переключается на более высокую передачу, требуемая скорость Ne* вращения двигателя 22 уменьшается по сравнению со скоростью вращения двигателя без изменения положения механизма переключения передач, то есть со скоростью вращения двигателя в эффективной точке привода, обеспечивающей эффективную работу двигателя 22. Такое уменьшение скорости Ne* вращения двигателя 22 в ответ на переключение на более высокую передачу позволяет водителю испытать надлежащее ощущение переключения передач, и, таким образом, у водителя не возникает ощущения, будто что-то не так. Установка для флага F1 значения "1" означает утвердительный ответ, то есть выполнение процесса обновления требуемой скорости вращения при переключении на более высокую передачу на этапе S130 в следующем цикле программы управления приводом, изображенной на фиг.2.
С другой стороны, когда на этапе S300 флаг G равен "1", ЦПУ 72 вычитает заранее установленное значение Δα из предыдущей установки поправочной величины α (предыдущая α), которое было установлено в предыдущем цикле процесса обновления требуемой скорости вращения при переключении на более высокую передачу, для обновления поправочной величины α (этап S340) и проверяет поправочное значение (этап S350). Если поправочная величина α положительна, ЦПУ 72 обновляет требуемую скорость Ne* вращения двигателя 22 (этап S360) посредством вычитания, аналогичного вычитанию на этапе S320, устанавливает флаг F1 равным "1" (этап S370) и завершает процесс обновления требуемой скорости вращения при переключении на более высокую передачу. Заранее установленное значение Δα представляет степень приближения требуемой скорости Ne* вращения двигателя 22 к скорости вращения двигателя в эффективной точке привода в каждом цикле процесса обновления требуемой скорости вращения при переключении на более высокую передачу. Заранее установленное значение Δα меньше опорного значения α1 и зависит от характеристик двигателя 22. Повторное выполнение процесса обновления требуемой скорости вращения при переключении на более высокую передачу постепенно уменьшает поправочную величину α и постепенно приближает требуемую скорость Ne* вращения двигателя 22 при переключении на более высокую передачу к скорости вращения двигателя в эффективной точке привода. Когда поправочная величина α становится равна или меньше "0" (этап S350), ЦПУ 72 устанавливает флаг F1 равным "0" (этап S380) и завершает процесс обновления требуемой скорости вращения при переключении на более высокую передачу, не обновляя требуемой скорости Ne* вращения двигателя 22. Установка для флага F1 значения "0" означает отрицательный ответ, то есть отсутствие выполнения процесса обновления требуемой скорости вращения при переключении на более высокую передачу на этапе S130 в следующем цикле программы управления приводом, изображенной на фиг.2.
Если вновь обратиться к программе управления приводом, изображенной на фиг.2, то можно увидеть, что в ответ на определение переключения на более низкую передачу на этапе S160 ЦПУ 72 выполняет процесс обновления требуемой скорости вращения при переключении на более низкую передачу (этап S180) и затем переходит к обработке описанного выше этапа S190 и после этого этапа. Подробные сведения о процессе обновления требуемой скорости вращения при переключении на более низкую передачу на этапе S180 описаны со ссылкой на блок-схему, изображенную на фиг.7. В процессе обновления требуемой скорости вращения при переключении на более низкую передачу, в случае, когда флаг G равен "0" (этап S400), ЦПУ 72 устанавливает для поправочной величины β заранее определенное опорное значение β1 (шаг S410) и прибавляет поправочную величину β к требуемой скорости Ne* вращения двигателя 22, установленной на этапе S120 в программе управления приводом, изображенной на фиг.2, для обновления требуемой скорости Ne* вращения двигателя 22 (этап S420). Затем ЦПУ 72 устанавливает для флага G и флага F2 значение, равное "1" (этапы S430 и S470), и завершает процесс обновления требуемой скорости вращения при переключении на более низкую передачу. Опорное значение β1 представляет степень прироста требуемой скорости Ne* вращения двигателя 22 и зависит от характеристик двигателя 22. Когда положение передачи в последовательности переключения передач переключается на более низкую передачу, требуемая скорость Ne* вращения двигателя 22 увеличивается, чтобы быть выше скорости вращения двигателя в эффективной точке привода, обеспечивающей эффективную работу двигателя 22. Такое увеличение скорости Ne* вращения двигателя 22 в ответ на переключение на более низкую передачу позволяет водителю испытать надлежащее ощущение переключения передач и не вызывает у водителя ощущения, будто что-то не так. Установка для флага F2 значения "1" означает утвердительный ответ, то есть выполнение процесса обновления требуемой скорости вращения при переключении на более низкую передачу на этапе S150 в следующем цикле программы управления приводом, изображенной на фиг.2.
С другой стороны, когда на этапе S400 флаг G равен "1", ЦПУ 72 вычитает заранее установленное значение Δβ из предыдущей установки поправочной величины β (предыдущая β), которая была установлена в предыдущем цикле процесса обновления требуемой скорости вращения при переключении на более низкую передачу, для обновления поправочной величины β (этап S440). Когда обновленная поправочная величина β положительна (этап S450), ЦПУ 72 обновляет требуемую скорость Ne* вращения двигателя 22 (этап S460) посредством операции сложения, аналогичной проведенной на этапе S420, устанавливает флаг F2 равным "1" (этап S470) и завершает процесс обновления требуемой скорости вращения при переключении на пониженную передачу. Предварительно установленное значение Δβ представляет степень приближения требуемой скорости Ne* вращения двигателя 22 к скорости вращения двигателя в эффективной точке привода в каждом цикле процесса обновления требуемой скорости вращения при переключении на более низкую передачу. Предварительно установленное значение Δβ меньше опорного значения β1 и зависит от характеристик двигателя 22. Повторное выполнение процесса обновления требуемой скорости вращения при переключении на более низкую передачу постепенно приближает требуемую скорость Ne* вращения двигателя 22 при переключении на пониженную передачу к скорости вращения двигателя в эффективной точке привода. Когда поправочная величина β становится равна или меньше "0" (этап S450), ЦПУ 72 устанавливает флаг F2 равным "0" (этап S480) и завершает процесс обновления требуемой скорости вращения при переключении на более низкую передачу, не обновляя требуемую скорость Ne* вращения двигателя 22. Установка для флага F2 значения "0" означает отрицательный ответ, то есть отсутствие выполнения процесса обновления требуемой скорости вращения при переключении на более низкую передачу на этапе S150 в следующем цикле программы управления приводом, изображенной на фиг.2.
На фиг.8 приведены изменения во времени скорости V транспортного средства, положения механизма переключения передач ПП и скорости Ne вращения двигателя 22 в ответ на переключение на более высокую передачу. Сплошная линия показывает управление приводом согласно приведенному варианту осуществления, в котором в ответ на каждое изменение положения механизма переключения передач ПП изменяется скорость Ne вращения двигателя 22. Прерывистая кривая показывает управление приводом, известное из уровня техники, в котором в ответ на любое изменение положения механизма переключения передач ПП не происходит никакого изменения скорости Ne вращения двигателя 22. Предполагается, что для ускорения гибридного транспортного средства 20 водитель нажимает на педаль 83 акселератора на относительно большую глубину. В предшествующем уровне техники управления приводом скорость Ne вращения двигателя 22 не изменяется в ответ на переключение положения механизма переключения передач ПП на более высокую передачу с передачи "S1" на передачу "S2", когда скорость V транспортного средства в момент времени t1 возрастает до заранее установленного значения V1. Отсутствие изменения скорости вращения двигателя вызывает у водителя ощущение, будто что-то не так, поскольку водитель, как правило, привык к ощущению переключения передач в обычном транспортном средстве, оснащенном ступенчатой автоматической трансмиссией, которая переключает передачу для преобразования выходной мощности двигателя и передает преобразованную мощность на ось. В то же время управление приводом согласно приведенному варианту осуществления однократно уменьшает скорость Ne вращения двигателя 22 в ответ на переключение положения механизма переключения передач ПП на более высокую передачу с передачи "S1" на передачу "S2", когда скорость V транспортного средства возрастает в момент времени t1 до заранее установленного значения V1, и затем постепенно повышает скорость Ne вращения двигателя 22 для приближения к ожидаемому значению скорости вращения двигателя без изменения положения механизма переключения передач ПП. Такое изменение в скорости вращения двигателя позволяет водителю испытать надлежащее ощущение переключения передач, которое похоже на привычное ощущение переключения передач в обычном транспортном средстве, оснащенном ступенчатой автоматической трансмиссией. Другими словами, управление приводом согласно настоящему варианту осуществления препятствует возникновению у водителя ощущения, будто что-то не так. При любом переключении на более высокую передачу в диапазоне последовательного переключения передач, например с передачи "S2" на передачу "S3", управление приводом согласно настоящему варианту осуществления однократно уменьшает скорость Ne вращения двигателя 22, а затем постепенно повышает скорость Ne вращения, приближая ее к ожидаемой скорости вращения двигателя без изменения положения механизма переключения передач ПП. Это позволяет водителю испытывать надлежащее ощущение переключения передач.
В гибридном транспортном средстве 20 приведенного варианта осуществления в ответ на переключение механизма переключения передач ПП на более высокую передачу в последовательности переключения передач управление приводом уменьшает требуемую скорость Ne* вращения двигателя 22, чтобы сделать ее ниже скорости вращения двигателя в эффективной точке привода. В ответ на переключение механизма переключения передач ПП на более низкую передачу в диапазоне последовательного переключения передач управление приводом увеличивает требуемую скорость Ne* вращения двигателя 22, чтобы сделать ее выше скорости вращения двигателя в эффективной точке привода. Такое управление приводом позволяет водителю испытать надлежащее ощущение переключения передачи в ответ на переключение на более высокую или более низкую передачу. Водитель, как правило, привык испытывать ощущение переключения передач в обычном транспортном средстве, оснащенном ступенчатой автоматической трансмиссией, которая переключает передачу для преобразования выходной мощности двигателя и передает преобразованную мощность на ось. Предполагается, что такая конструкция не позволит водителю испытать ощущение, будто что-то не так.
Гибридное транспортное средство 20 приведенного варианта осуществления имеет диапазон последовательного переключения передач, в котором положение передачи переключается в соответствии со скоростью V транспортного средства даже при отсутствии действий водителя по переключению на более высокую передачу при условии, что степень Acc открытия акселератора достигает или превышает заранее установленный верхний предел. Такое управление приводом позволяет водителю испытывать надлежащее ощущение переключения передачи, которое похоже на привычное ощущение переключения передачи в обычном транспортном средстве, оснащенном ступенчатой автоматической трансмиссией.
В гибридном транспортном средстве 20 приведенного варианта осуществления опорные значения α1 и β1 устанавливаются фиксированными независимо от нового положения передачи, например "S3" или "S4", после переключения передачи в процессе обновления требуемой скорости вращения при переключении на более высокую передачу, изображенном на фиг.6, и в процессе обновления требуемой скорости вращения при переключении на более низкую передачу, изображенном на фиг.7. Однако опорные значения α1 и β1 могут изменяться в соответствии с новым положением передачи после переключения передачи. Например, опорные значения α1 и β1 могут уменьшаться в соответствии с более низким положением передачи после переключения передачи.
В гибридном транспортном средстве 20 приведенного варианта осуществления управление приводом уменьшает требуемую скорость Ne* вращения двигателя 22 в ответ на переключение на более высокую передачу и увеличивает требуемую скорость Ne* вращения двигателя 22 в ответ на переключение на более низкую передачу. Одна возможная модификация управления приводом уменьшает требуемую скорость Ne* в ответ на переключение на более высокую передачу, но оставляет требуемую скорость Ne* вращения неизменной в ответ на переключение на более низкую передачу. Другая возможная модификация управления приводом увеличивает требуемую скорость Ne* вращения в ответ на переключение на более низкую передачу, но сохраняет требуемую скорость Ne* вращения неизменной в ответ на переключение на более высокую передачу.
В гибридном транспортном средстве 20 приведенного варианта осуществления процесс обновления требуемой скорости вращения при переключении на более высокую передачу, изображенный на фиг.6, вычитает поправочное значение α из требуемой скорости Ne* вращения двигателя 22, которая была установлена на этапе S120 в программе управления приводом, изображенной на фиг.2, для обновления требуемой скорости Ne* вращения двигателя 22. Требуемая скорость Ne* вращения двигателя 22 может быть обновлена и другим способом. Например, в одной модифицированной процедуре требуемая скорость Ne* вращения двигателя 22, которая была установлена на этапе S120 в программе управления приводом, изображенной на фиг.2, может умножаться на заранее установленный поправочный коэффициент κ1, значение которого меньше 1, для обновления требуемой скорости Ne* вращения двигателя 22. Аналогично, в одной модифицированной процедуре процесса обновления требуемой скорости вращения при переключении на более низкую передачу процедуры процесса обновления скорости вращения для понижения передачи, изображенного на фиг.7, требуемая скорость Ne* вращения двигателя 22, установленная на этапе S120 в программе управления приводом, изображенной на фиг.2, может умножаться на заранее установленный поправочный коэффициент κ2, значение которого больше единицы, для обновления требуемой скорости Ne* вращения двигателя 22.
В гибридном транспортном средстве 20 согласно вышеприведенному варианту осуществления процесс обновления требуемой скорости вращения при переключении на более высокую передачу, изображенный на фиг.6, непосредственно корректирует требуемую скорость Ne* вращения двигателя 22. Требуемая скорость Ne* вращения двигателя 22 может быть ограничена максимальной скоростью вращения Nemax, являющейся верхним пределом допустимой скорости вращения для приведения двигателя 22 в движение. Одна модифицированная последовательность процесса обновления требуемой скорости вращения при переключении на более высокую передачу приведена на блок-схеме с фиг.9. В модифицированной последовательности процесса обновления требуемой скорости вращения при переключении на более высокую передачу, изображенной на фиг.9, в случае, когда на этапе S500 флаг G равен "0", ЦПУ 72 вычитает заданную величину γ из заранее установленной максимальной скорости Nemax вращения для установления максимальной скорости Nemax1 при переключении на более высокую передачу (шаг S510). Требуемая скорость Ne* вращения двигателя 22, установленная на этапе S120 в программе управления приводом, изображенной на фиг.2, ограничена максимальной скоростью Nemax1 вращения при переключении на более высокую передачу (шаг S520). Модифицированная последовательность последовательно устанавливает флаги G и F1 в "1" (этапы S530 и S570) и завершает процесс обновления требуемой скорости вращения при переключении на более высокую передачу, изображенный на фиг.9. Заданная величина γ устанавливается таким образом, чтобы требуемая скорость Ne* вращения двигателя 22 при переключении на более высокую передачу была ниже требуемой скорости Ne* вращения двигателя 22 без какого-либо изменения в положении механизма переключения передач ПП, причем она зависит от характеристик двигателя 22. С другой стороны, когда на этапе S500 флаг G равен "1", ЦПУ 72 прибавляет заранее определенное значение Δγ, меньшее заданной величины γ, к предыдущему значению максимальной скорости Nemax1 (предыдущая Nemax1), установленному в предыдущем цикле модифицированного процесса обновления требуемой скорости вращения, изображенного на фиг.9, для обновления максимальной скорости вращения Nemax1 при переключении на более высокую передачу (шаг S540). Когда обновленная максимальная скорость Nemax1 вращения при переключении на более высокую передачу ниже заранее установленной максимальной скорости Nemax вращения (шаг S550), ЦПУ 72 ограничивает требуемую скорость Ne* вращения двигателя 22 максимальной скоростью Nemax1 вращения при переключении на более высокую передачу (этап S560) аналогично тому, как делается на этапе S520, и устанавливает флаг F1 в "1" (этап S570). С другой стороны, когда обновленная максимальная скорость Nemax вращения при переключении на более высокую передачу не ниже заранее установленной максимальной скорости Nemax вращения (шаг S550), ЦПУ 72 устанавливает флаг F1 в "0" и выходит из модифицированного процесса обновления скорости вращения при переключении на более высокую передачу, изображенного на фиг.9. Это модифицированное управление приводом ограничивает требуемую скорость Ne* вращения двигателя 22 максимальной скоростью Nemax1 вращения при переключении на более высокую передачу и таким образом позволяет водителю испытывать надлежащее ощущение переключения передач.
В гибридном транспортном средстве 20 приведенного варианта осуществления процесс обновления требуемой скорости вращения при переключении на более высокую передачу, изображенный на фиг.6, и процесс обновления требуемой скорости вращения при переключении на более низкую передачу, изображенный на фиг.7, изменяет требуемую скорость Ne* вращения двигателя 22 независимо от входного и выходного пределов Win и Wout аккумуляторной батареи 50. В одной возможной модификации можно менять скорость Ne* вращения двигателя 22 в зависимости от входного и выходного пределов Win и Wout аккумуляторной батареи 50. На блок-схемах на фиг.10 и фиг.11 изображены модифицированные последовательности соответственно процесса обновления требуемой скорости вращения при переключении на более высокую передачу и процесса обновления требуемой скорости вращения при переключении на более низкую передачу с учетом входного и выходного пределов Win и Wout аккумуляторной батареи 50. Модифицированный процесс обновления требуемой скорости вращения при переключении на более высокую передачу, изображенный на фиг.10, идентичен процессу обновления требуемой скорости вращения при переключении на более высокую передачу, изображенному на фиг.6, за исключением того, что этапы S310-S330 заменены этапами S600-S640. В модифицированном процессе обновления требуемой скорости вращения при переключении на более высокую передачу, изображенном на фиг.10, в случае, когда флаг G равен "0" (этап S300), ЦПУ 72 прибавляет заданное значение Δα1 к предыдущему значению поправочной величины α (предыдущая α), установленному в предыдущем цикле процесса обновления требуемой скорости вращения при переключении на более высокую передачу, для обновления поправочной величины α (этап S600). Затем ЦПУ 72 ограничивает обновленную поправочную величину α максимальным поправочным значением αmax, являющимся верхним пределом (этап S610), и вычитает ограниченную поправочную величину α из требуемой скорости Ne* вращения двигателя 22, установленной на этапе S120 в программе управления приводом, изображенной на фиг.2, для обновления требуемой скорости Ne* вращения двигателя 22 (этап S620). Когда поправочная величина α не равна максимальному поправочному значению αmax (этап S630), ЦПУ 72 устанавливает флаг F1 в "1" (этап S370) и выходит от модифицированного процесса обновления требуемой скорости вращения при переключении на более высокую передачу, изображенного на фиг.10. Начальное значение поправочной величины α устанавливается равным "0". Максимальное поправочное значение αmax эквивалентно опорному значению α1 в процессе обновления требуемой скорости вращения при переключении на более высокую передачу, изображенном на фиг.6. Заданное значение Δα1 представляет степень уменьшения требуемой скорости Ne* вращения двигателя 22 в каждом цикле процесса обновления требуемой скорости вращения при переключении на более высокую передачу и зависит от входного предела Win аккумуляторной батареи 50. Заданное значение Δα1 устанавливается с учетом входного предела Win аккумуляторной батареи 50 по нижеследующим причинам. Предполагается, что скорость Ne вращения двигателя 22 понижена в обычном состоянии привода гибридного транспортного средства 20. Скорость Ne вращения двигателя 22 уменьшается с увеличением подаваемого крутящего момента Tm1 от электродвигателя MG1. Увеличение подаваемого крутящего момента Tm1 от электродвигателя MG1 увеличивает электрическую мощность (Tm1·Nm1), вырабатываемую электродвигателем MG1. Избыточная электрическая мощность, неиспользованная электродвигателем MG2, заряжает аккумуляторную батарею 50. Чтобы не допустить поступления избытка электрической мощности в аккумуляторную батарею 50, заданное значение Δα1 устанавливается с учетом входного предела Win аккумуляторной батареи 50. Установка для заданного значения Δα1 максимально возможного значения с учетом входного предела Win аккумуляторной батареи 50 позволяет водителю испытывать надлежащее ощущение переключения передачи. Каждый цикл процесса обновления требуемой скорости вращения при переключении на более высокую передачу постепенно увеличивает поправочную величину α и уменьшает требуемую скорость Ne* вращения двигателя 22. Когда на этапе S630 поправочная величина α достигает максимального поправочного значения αmax, флаг G устанавливается равным "1" (этап S640). Последовательность обработки в процессе обновления требуемой скорости вращения переключения на более высокую передачу, приведенном на фиг.10, при условии, что на этапе S300 флаг G равен "1", идентична последовательности обработки в процессе обновления требуемой скорости вращения при переключении на более высокую передачу, изображенном на фиг.6, и специально здесь не описывается.
Модифицированный процесс обновления требуемой скорости вращения при переключении на более низкую передачу, изображенный на фиг.11, идентичен процессу обновления требуемой скорости вращения при переключении на более низкую передачу, изображенному на фиг.7, за исключением того, что этапы S410-S430 заменены этапами S700-S740. В модифицированном процессе обновления требуемой скорости вращения при переключении на более низкую передачу, изображенном на фиг.11, в случае, когда флаг G равен "0" (этап S400), ЦПУ 72 прибавляет заданное значение Δβ1 к предыдущему значению поправочной величины β (предыдущая β), установленному в предыдущем цикле процесса обновления требуемой скорости вращения при переключении на более низкую передачу для обновления поправочной величины β (этап S700). Затем ЦПУ 72 ограничивает обновленную поправочную величину β максимальным поправочным значением βmax, являющимся верхним пределом (шаг S710), и прибавляет ограниченную поправочную величину β к требуемой скорости Ne* вращения двигателя 22, установленной на этапе S120 в программе управления приводом, изображенной на фиг.2, для обновления требуемой скорости Ne* вращения двигателя 22 (этап S720). Когда поправочное значение β не равно максимальной поправочной величине βmax (этап S730), ЦПУ 72 устанавливает флаг F2 в "1" (этап S470) и выходит из модифицированного процесса обновления требуемой скорости вращения при переключении на более низкую передачу, изображенного на фиг.11. Начальное значение поправочной величины β устанавливается равным "0". Максимальное поправочное значение βmax эквивалентно опорному значению β1 в процессе обновления требуемой скорости вращения при переключении на более низкую передачу, изображенном на фиг.7. Заданное значение Δβ1 представляет степень прироста требуемой скорости Ne* вращения двигателя 22 в каждом цикле процесса обновления скорости вращения при переключении на более низкую передачу и зависит от выходного предела Wout аккумуляторной батареи 50. Заданное значение Δβ1 устанавливается с учетом выходного предела Wout аккумуляторной батареи 50 по нижеследующим причинам. Предполагается, что скорость Ne вращения двигателя 22 повышается в обычном состоянии привода гибридного транспортного средства 20. Скорость Ne вращения двигателя 22 повышается с уменьшением крутящего момента Tm1, поступающего от электродвигателя MG1. Уменьшение выходного крутящего момента Tm1 электродвигателя MG1 уменьшает электроэнергию (Tm1·Nm1), вырабатываемую электродвигателем MG1. Таким образом, часть электроэнергии, которую должен потребить электродвигатель MG2, поступает за счет разряда аккумуляторной батареи 50. Для недопущения поступления избыточной электрической мощности от аккумуляторной батареи 50 заданное значение Δβ1 устанавливается с учетом выходного предела Wout аккумуляторной батареи 50. Установка для заданного значения Δβ1 максимально возможного значения позволяет водителю испытывать надлежащее ощущение переключения передачи. Каждый цикл процесса обновления требуемой скорости вращения при переключении на более низкую передачу постепенно увеличивает поправочную величину β и увеличивает требуемую скорость Ne* вращения двигателя 22. Когда на этапе S730 поправочная величина β достигает максимального поправочного значения βmax, флаг G устанавливается равным "1" (этап S740). Последовательность обработки в процессе обновления требуемой скорости вращения при переключении на более низкую передачу, изображенном на фиг.11, при условии, что на этапе S400 флаг G равен "1", идентична последовательности обработки в процессе обновления требуемой скорости вращения при переключении на более низкую передачу, изображенном на фиг.7, и специально здесь не описывается. На фиг.12 приведены изменения во времени скорости V транспортного средства, положения механизма переключения передач ПП и скорости Ne вращения двигателя 22 в ответ на переключение на более низкую передачу, например с передачи "S4" на передачу "S3". Сплошная линия показывает изменение скорости Ne вращения двигателя 22 при установке заданного значения Δβ1 с учетом выходного предела Wout аккумуляторной батареи 50. Прерывистая линия показывает изменение скорости Ne вращения двигателя 22 при установке заданного значения Δβ1 без учета выходного предела Wout аккумуляторной батареи 50. Когда в ответ на переключение на более низкую передачу в момент времени t5 для заданного значения устанавливается относительно небольшое значение, управление приводом плавно изменяет требуемую скорость Ne* вращения двигателя 22, как показывает прерывистая линия. Такое управление приводом не позволяет водителю испытывать надлежащее ощущение переключения передач. С другой стороны, когда в ответ на переключение на более низкую передачу в момент времени t5 для заданного значения Δβ1 устанавливается максимально возможное значение с учетом выходного предела Wout, управление приводом быстро изменяет требуемую скорость Ne* вращения двигателя 22, как показывает сплошная линия, не позволяя при этом чрезмерно разряжаться аккумуляторной батарее 50. Это управление приводом позволяет водителю испытывать надлежащее ощущение переключения передач.
В гибридном транспортном средстве 20 приведенного варианта осуществления процесс обновления требуемой скорости вращения при переключении на более высокую передачу, изображенный на фиг.6, изменяет скорость Ne* вращения двигателя 22 независимо от того, вызвано ли переключение на более высокую передачу воздействием водителя на рычаг 81 переключения передач или изменениями степени Acc открытия акселератора и скорости V транспортного средства. Другая возможная модификация может изменять требуемую скорость Ne* вращения двигателя 22 при переключении на более высокую передачу. Блок-схема с фиг.13 изображает модифицированную последовательность процесса обновления требуемой скорости вращения при переключении на более высокую передачу с учетом такой причины. Модифицированный процесс обновления требуемой скорости вращения переключения на более высокую передачу, изображенный на фиг.13, идентичен процессу обновления требуемой скорости вращения при переключении на более высокую передачу, изображенному на фиг.6, за исключением того, что этапы S310-S330 заменены этапами S750-S764. В модифицированном процессе обновления требуемой скорости вращения при переключении на более высокую передачу, изображенном на фиг.13, в случае, когда флаг G равен "0" (этап S300), ЦПУ 72 определяет, вызвано ли переключение на более высокую передачу воздействием водителя на рычаг 81 переключения передачи или изменениями степени Acc открытия акселератора и скорости V транспортного средства (этап S750). Когда на этапе S750 переключение на более высокую передачу отнесено к воздействию водителя на рычаг 81 переключения передачи, ЦПУ 72 устанавливает относительно большое заданное значение α2 для поправочного градиента Δα2 (этап S752) и прибавляет поправочный градиент Δα2 к предыдущему значению поправочной величины α (предыдущая α) для обновления поправочной величины α (этап S756). Затем ЦПУ 72 ограничивает обновленную поправочную величину α максимальным поправочным значением αmax, являющимся верхним пределом (этап S758), и вычитает ограниченную поправочную величину α из требуемой скорости Ne* вращения двигателя 22, установленной на этапе S120 в программе управления приводом, изображенной на фиг.2, для обновления требуемой скорости Ne* вращения двигателя 22 (этап S760). Когда поправочная величина α не равна максимальному поправочному значению αmax (этап S762), ЦПУ 72 устанавливает флаг F1 в "1" (этап S370) и выходит из модифицированного процесса обновления требуемой скорости вращения при переключении на более высокую передачу, изображенного на фиг.13. Когда поправочная величина α достигает максимального поправочного значения αmax (этап S762), ЦПУ 72 последовательно устанавливает флаги G и Fl в "1" (этапы S764 и S370) и выходит из модифицированного процесса обновления требуемой скорости вращения при переключении на более высокую передачу, изображенного на фиг.13. Начальное значение поправочной величины α устанавливается равным "0". Максимальное поправочное значение αmax эквивалентно опорному значению α1 в процессе обновления требуемой скорости вращения при переключении на более высокую передачу, изображенному на фиг.6. Когда переключение на более высокую передачу вызвано воздействием водителя на рычаг 81 переключения передач, модифицированное управление приводом снижает требуемую скорость Ne* вращения двигателя 22 на поправочную величину α, обновленную посредством прибавления относительно большого поправочного градиента Δα2. Такая конструкция резко снижает скорость Ne вращения двигателя 22 и позволяет водителю испытывать надлежащее ощущение переключения передач. С другой стороны, когда на этапе S750 переключение на более высокую передачу отнесено к изменениям степени Acc открытия акселератора и скорости V транспортного средства, ЦПУ 72 устанавливает для поправочного градиента Δα2 заданное значение α3, меньшее заданного значения α2, (этап S754) и выполняет вышеописанную обработку на этапе S756 и после этого этапа. Когда положение передачи переключается на более высокую передачу в диапазоне последовательного переключения передач в соответствии со степенью Acc открытия акселератора и скоростью V транспортного средства при отсутствии воздействия водителя на рычаг 81 переключения передач, модифицированное управление приводом уменьшает требуемую скорость Ne* вращения двигателя 22 на поправочную величину α, обновленную посредством прибавления относительно маленького поправочного градиента Δα2. Такая конструкция умеренно снижает скорость Ne вращения двигателя 22 и не позволяет водителю испытать странное ощущение от неожиданного переключения на более высокую передачу. Заданное значение α3, установленное для поправочного градиента Δα2, представляет степень, которая не позволяет водителю испытать ощущение, будто что-то не так. Последовательность обработки в процессе обновления требуемой скорости вращения при переключении на более высокую передачу, изображенная на фиг.13, при условии, что на этапе S300 флаг G равен "1", идентична последовательности обработки в процессе обновления требуемой скорости вращения при переключении на более высокую передачу, изображенной на фиг.6, и специально здесь не описывается. На фиг.14 приведены изменения во времени положения механизма переключения передач ПП и скорости Ne вращения двигателя 22 в ответ на переключение на более высокую передачу, например с передачи "S3" на передачу "S4". Сплошная линия показывает изменение скорости Ne вращения двигателя 22 в ответ на переключение на более высокую передачу, вызванное воздействием водителя на рычаг 81 переключения передач. Прерывистая линия показывает изменение скорости Ne вращения двигателя 22 в ответ на переключение на более высокую передачу, вызванное изменениями степени Acc открытия акселератора и скорости V транспортного средства. Управление приводом довольно резко уменьшает скорость Ne вращения двигателя 22 в ответ на переключение на более высокую передачу, вызванное воздействием водителя на рычаг 81 переключения передач в момент времени t6, как показано сплошной линией. Это позволяет водителю испытать надлежащее ощущение переключения передачи. Управление приводом довольно плавно уменьшает скорость Ne вращения двигателя 22 в ответ на переключение на более высокую передачу, вызванное изменениями степени Acc открытия акселератора и скорости V транспортного средства в момент времени t6 при отсутствии воздействия водителя на рычаг 81 переключения передач, как показано прерывистой линией. Это не позволяет водителю испытывать непривычное ощущение внезапного переключения передачи. Описанная выше модификация в отношении переключения на более высокую передачу относится также к переключению на более низкую передачу. Аналогичная модифицированная последовательность процесса обновления требуемой скорости вращения при переключении на более низкую передачу изменяет требуемую скорость Ne* вращения двигателя 22 с учетом того, вызвано ли переключение на более низкую передачу воздействием водителя на рычаг 81 переключения передач или изменениями степени Acc открытия акселератора и скорости V транспортного средства.
В гибридном транспортном средстве 20 приведенного варианта осуществления в ответ на изменение положения механизма переключения передач ПП управление приводом выполняет либо процесс обновления требуемой скорости вращения при переключении на более высокую передачу, изображенный на фиг.6, или процесс обновления требуемой скорости вращения при переключении на более низкую передачу, изображенный на фиг.7, для изменения только скорости вращения двигателя с первоначальной скорости вращения двигателя в точке привода с фиксированным положением механизма переключения передач ПП. Одна возможная модификация может одновременно изменять скорость вращения двигателя и крутящий момент двигателя в ответ на изменение положения механизма переключения передач ПП. Последовательность выполнения программы управления приводом при такой модификации приведена на блок-схеме, изображенной на фиг.15. Модифицированная программа управления приводом, изображенная на фиг.15, в целом идентична программе управления приводом, изображенной на фиг.2, за исключением того, что процесс обновления требуемой скорости вращения при переключении на более высокую передачу (этап S170) и процесс обновления требуемой скорости вращения при переключении на более низкую передачу (этап S180) заменены процессом обновления точки привода при переключении на более высокую передачу (этап S170b) и процессом обновления точки привода при переключении на более низкую передачу (этап S180b). На этапе S130b флаг F3 в модифицированной программе управления приводом, изображенной на фиг.15, имеет начальное значение "0" и устанавливается равным "1" во время выполнения процесса обновления точки привода при переключении на более высокую передачу. Аналогично, на этапе S150b флаг F4 имеет начальное значение "0" и устанавливается равным "1" во время выполнения процесса обновления точки привода при переключении на более низкую передачу. В модифицированной программе управления приводом, изображенной на фиг.15, в ответ на определение на этапе S140 переключения на более высокую передачу ЦПУ 72 выполняет процесс обновления точки привода при переключении на более высокую передачу (этап S170b). Следующий цикл модифицированной программы управления приводом дает утвердительный ответ на этапе S130b, означающий выполнение процесса обновления точки привода при переключении на более высокую передачу, и переходит к этапу S170b для продолжения выполнения процесса обновления точки привода при переключении на более высокую передачу. С другой стороны, в ответ на определение на этапе S160 переключения на более низкую передачу ЦПУ 72 выполняет процесс обновления точки привода при переключении на более низкую передачу (этап S180b). Следующий цикл модифицированной программы управления приводом дает на этапе 150b утвердительный ответ, означающий выполнение процесса обновления точки привода при переключении на более низкую передачу, и переходит к этапу S180b для продолжения выполнения процесса обновления точки привода при переключении на более низкую передачу. Например, подробные сведения о процессе обновления точки привода при переключении на более высокую передачу кратко описаны со ссылкой на блок-схему, изображенную на фиг.16. В процессе обновления точки привода при переключении на более высокую передачу, изображенном на фиг.16, ЦПУ 72 сначала определяет флаг G2, представляющий изменение точки привода двигателя 22 (этап S800). Когда на этапе S800 флаг G2 равен "0", ЦПУ 72 устанавливает заданное опорное значение ε1 для поправочной величины ε (этап S810) и вычитает поправочную величину ε из требуемой мощности Pe* на этапе S110 модифицированной программы управления приводом, изображенной на фиг.15, для обновления требуемой мощности Pe* двигателя (этап S820). Опорное значение ε1 зависит от характеристик двигателя 22. Затем ЦПУ 72 обращается к линии эффективной работы двигателя 22 и кривой обновленной требуемой мощности Pe* двигателя для обновления требуемой скорости Ne* вращения и требуемого крутящего момента Te* двигателя 22 (этап S830). ЦПУ 72 последовательно устанавливает флаг G2 и флаг F3 равными "1" (этапы S840 и S890) и завершает процесс обновления точки привода при переключении на более высокую передачу. На фиг.17 изображено изменение точки привода двигателя 22 в ответ на переключение на более высокую передачу. Как показано на чертеже, в ответ на переключение на более высокую передачу управление приводом уменьшает требуемую скорость Ne* вращения и требуемый крутящий момент Te* двигателя 22 для изменения точки привода. Это позволяет водителю испытать надлежащее ощущение переключения передачи. Естественно, что уменьшенный требуемый крутящий момент Te* двигателя 22 уменьшает долю выходного крутящего момента Te* двигателя 22, который непосредственно передается валу 32a венцовой шестерни (далее именуемый "непосредственно переданным крутящим моментом"). Осуществляется управление электродвигателем для компенсации уменьшения непосредственно переданного крутящего момента в диапазоне выходного предела Wout аккумуляторной батареи 50. Предполагается, что такая компенсация смягчает потенциальное ударное воздействие из-за уменьшения крутящего момента двигателя, подаваемого на вал 32a венцовой шестерни, соединенный с осью 36. Однако для обеспечения улучшенного ощущения переключения передач водителем электродвигатель MG2 может не компенсировать уменьшение крутящего момента двигателя, подаваемого на вал 32a венцовой шестерни. С другой стороны, когда на этапе S800 флаг G2 равен "1", ЦПУ 72 вычитает заранее установленное значение Δε из предыдущего значения поправочной величины ε, которое было установлено в предыдущем цикле процесса обновления точки привода при переключении на более высокую передачу, для обновления поправочной величины ε (этап S850) и проверяет поправочную величину ε (этап S860). Когда поправочная величина ε положительна, ЦПУ 72 обновляет требуемую мощность Pe* двигателя и, соответственно, требуемую скорость Ne* вращения и требуемый крутящий момент Te* двигателя 22 (этапы S870 и S880) аналогично тому, как выполняются этапы S820 и S830, устанавливает флаг F3 равным "1" (этап S890) и завершает процесс обновления точки привода при переключении на более высокую передачу. Повторное выполнение процесса обновления точки привода при переключении на более высокую передачу постепенно уменьшает поправочную величину ε и постепенно приближает требуемую мощность Pe* двигателя при переключении на более высокую передачу к требуемой мощности Pe* двигателя при отсутствии изменений положения механизма переключения передач ПП. Когда поправочная величина ε становится равна или меньше "0" (этап S860), ЦПУ 72 устанавливает флаг F3 равным "1" (этап S900) и завершает процесс обновления точки привода при переключении на более высокую передачу, не обновляя требуемую скорость Ne* вращения и требуемый крутящий момент Te* двигателя 22. В ответ на определение переключения на более низкую передачу на этапе S160 в модифицированной программе управления приводом, изображенной на фиг.15, требуемая мощность Pe* двигателя увеличивается для изменения точки привода. Это также позволяет водителю испытывать надлежащее ощущение переключения передач.
В гибридном транспортном средстве 20 приведенного варианта осуществления мощность электродвигателя MG2 подается на ось 36, связанную с ведущими колесами 39a и 39b. Принцип изобретения применим также к гибридному транспортному средству 120 одного модифицированного примера, изображенного на фиг.18, когда мощность электродвигателя MG2 подается на ось 36b, соединенную с ведущими колесами 39c и 39d, отличными от ведущих колес 39a и 39b.
В гибридном транспортном средстве 20 вышеприведенного варианта осуществления мощность двигателя 22 подается через механизм 30 объединения и распределения мощности на ось 36, соединенную с ведущими колесами 39a и 39b. Принцип изобретения применим также к гибридному транспортному средству 220 другого модифицированного примера, изображенного на фиг.19, которое оснащено двухроторным электродвигателем 230. Двухроторный электродвигатель 230 включает в себя внутренний ротор 232, соединенный с коленчатым валом 26 двигателя 22, и внешний ротор 234, связанный с осью 36, соединенной с ведущими колесами 39a и 39b. Двухроторный двигатель 230 передает часть выходной мощности двигателя 22 ведущим колесам 39a и 39b, а остальную выходную мощность двигателя преобразует в электрическую энергию.
В гибридном транспортном средстве 20 вышеприведенного варианта осуществления мощность двигателя 22 подается через механизм 30 объединения и распределения мощности на ось 36, соединенную с ведущими колесами 39a и 39b. Принцип изобретения также применим к гибридному транспортному средству 320 другого модифицированного примера, изображенного на фиг.20, когда мощность двигателя 22 подается через непрерывно регулируемую трансмиссию 330 на ось 36, соединенную с ведущими колесами 39a и 39b.
Варианты осуществления и их модифицированные примеры, рассмотренные выше, должны во всех отношениях рассматриваться как иллюстративные и неограничивающие. Может существовать множество других модификаций, изменений и вариантов, не выходящих из объема или сущности основных признаков настоящего изобретения.
Промышленная применимость
Способ согласно изобретению предпочтительно применяется в автомобильной промышленности и в других отраслях обрабатывающий промышленности.
Изобретение относится к автотранспортному средству и способу управления транспортным средством. Устройство содержит двигатель внутреннего сгорания, блок передачи мощности, электродвигатель, модуль установки требуемого приводного усилия, модуль установки эффективной точки привода, модуль управления. Способ заключается в том, что в случае отсутствия изменения положения механизма переключения передач устанавливают эффективную точку привода в заданную точку привода, определяемую согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, которое, как установлено, должно подаваться на ось, и управляют двигателем внутреннего сгорания, блоком передачи мощности и электродвигателем для приведения в движение двигателя внутреннего сгорания в установленной эффективной точке привода и для обеспечения подачи на ось приводного усилия, эквивалентного требуемому приводному усилию. В случае изменения положения механизма переключения передач устанавливают эффективную точку привода в обновленную точку привода, характеризуемую, по меньшей мере, изменением скорости вращения, из измененной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, и управляют двигателем внутреннего сгорания, блоком передачи мощности и электродвигателем для приведения в движение двигателя внутреннего сгорания в установленной эффективной точке привода и обеспечения подачи на ось приводного усилия, эквивалентного требуемому приводному усилию. Технический результат заключается в повышении эффективности управления приводом. 2 н. и 17 з.п. ф-лы, 20 ил.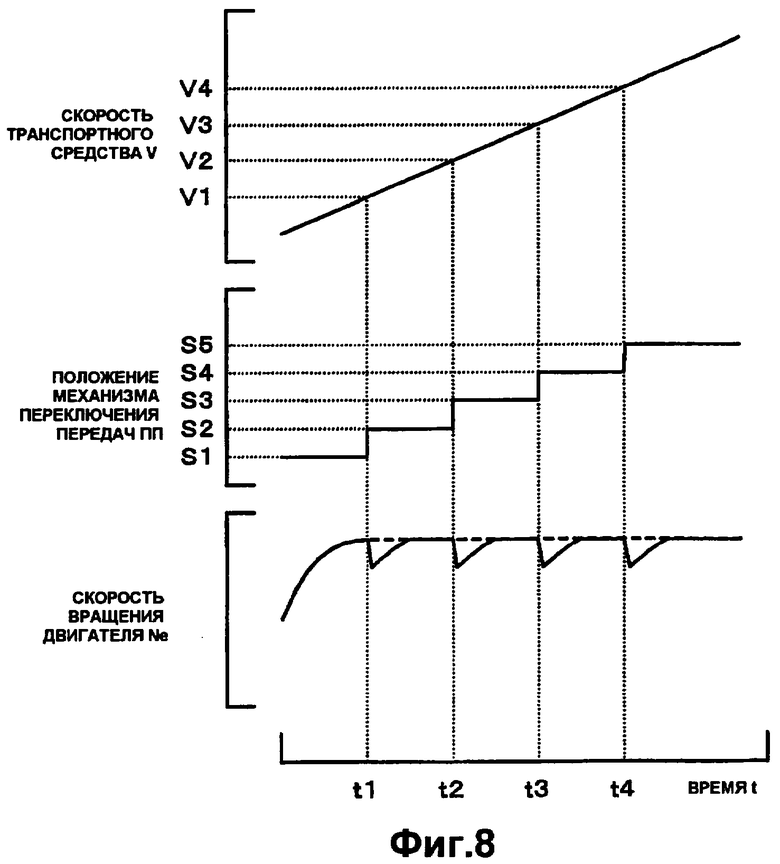
1. Транспортное средство, оснащенное двигателем внутреннего сгорания, блоком передачи мощности и электродвигателем, причем блок передачи мощности выполнен с возможностью передачи, по меньшей мере, части выходной мощности двигателя внутреннего сгорания, который приводится в движение в произвольной точке привода независимо от положения механизма переключения передач, на ось, а электродвигатель выполнен с возможностью подачи мощности на ось, при этом транспортное средство содержит:
модуль установки требуемого приводного усилия, который устанавливает требуемое приводное усилие, подаваемое на ось;
модуль установки эффективной точки привода, который, в случае отсутствия изменения положения механизма переключения передач, устанавливает эффективную точку привода в заданную точку привода, определяемую согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, а в случае изменения положения механизма переключения передач устанавливает эффективную точку привода в обновленную точку привода, характеризующуюся, по меньшей мере, изменением скорости вращения по отношению к заданной точке привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием; и
модуль управления, который управляет двигателем внутреннего сгорания, блоком передачи мощности и электродвигателями для приведения в движение двигателя внутреннего сгорания в установленной эффективной точке привода и для обеспечения подачи на ось приводного усилия, эквивалентного требуемому приводному усилию.
2. Транспортное средство по п.1, дополнительно содержащее механизм изменения положения механизма переключения передач, который изменяет положение механизма переключения передач в соответствии со степенью нажатия водителем на педаль акселератора и скоростью транспортного средства.
3. Транспортное средство по п.2, в котором механизм изменения положения механизма переключения передач изменяет положение механизма переключения передач в соответствии со скоростью транспортного средства, когда водитель нажимает на педаль акселератора до или свыше заранее установленного первого уровня.
4. Транспортное средство по п.1, дополнительно содержащее:
первый механизм изменения положения механизма переключения передач, который изменяет положение механизма переключения передач в результате изменения водителем положения механизма переключения передач; и
второй механизм изменения положения механизма переключения передач, который изменяет положение механизма переключения передач в соответствии со степенью нажатия водителем на педаль акселератора и скоростью транспортного средства независимо от изменения водителем положения механизма переключения передачи, причем модуль установки эффективной точки привода в ответ на изменение положения механизма переключения передач первым механизмом изменения положения механизма переключения передач устанавливает эффективную точку привода в обновленную точку привода, характеризующуюся, по меньшей мере, изменением скорости вращения до первой скорости, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, и в ответ на изменение положения механизма переключения передач вторым механизмом изменения положения механизма переключения передач устанавливает эффективную точку привода в обновленную точку привода двигателя, характеризующуюся, по меньшей мере, изменением скорости вращения до второй скорости, которая отличается от первой скорости, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием.
5. Транспортное средство по п.4, в котором вторая скорость ниже первой скорости.
6. Транспортное средство по п.1, в котором модуль установки эффективной точки привода в ответ на изменение положения механизма переключения передач устанавливает эффективную точку привода в обновленную точку привода, характеризующуюся, по меньшей мере, изменением скорости вращения, соответствующей измененному положению механизма переключения передач, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием.
7. Транспортное средство по п.1, в котором модуль установки эффективной точки привода в ответ на переключение положения механизма переключения передач на более высокую передачу устанавливает эффективную точку привода в обновленную точку привода, характеризующуюся уменьшением скорости вращения, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием.
8. Транспортное средство по п.7, в котором модуль установки эффективной точки привода в ответ на переключение положения механизма переключения передач на более высокую передачу ограничивает максимальную скорость вращения двигателя внутреннего сгорания и устанавливает эффективную точку привода в обновленную точку привода, характеризующуюся уменьшением скорости вращения в пределах ограниченной максимальной скорости вращения двигателя внутреннего сгорания, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием.
9. Транспортное средство по п.1, в котором модуль установки эффективной точки привода в ответ на переключение механизма переключения передач на более низкую передачу устанавливает эффективную точку привода в обновленную точку привода, характеризующуюся увеличением скорости вращения, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием.
10. Транспортное средство по п.1, в котором модуль установки эффективной точки привода постепенно приближает эффективную точку привода к заданной точке привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, с течением времени после изменения положения механизма переключения передач.
11. Транспортное средство по п.1, дополнительно содержащее: аккумуляторную батарею, выполненную с возможностью потребления и подачи электрической энергии как от блока передачи мощности и электродвигателя, так и к блоку передачи мощности и электродвигателю,
причем блок передачи мощности содержит механизм приема-подачи электрической энергии и механической энергии, который соединен с двигателем внутреннего сгорания и с осью и подает, по меньшей мере, часть выходной мощности двигателя внутреннего сгорания на ось посредством приема и подачи электрической энергии и механической энергии.
12. Транспортное средство по п.11, в котором модуль установки эффективной точки привода в ответ на переключение положения механизма переключения передач на более высокую передачу устанавливает эффективную точку привода в обновленную точку привода, характеризующуюся уменьшением скорости вращения, которая уменьшается на заранее установленное значение, соответствующее первому уровню изменения в пределах входного предела аккумуляторной батареи, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием.
13. Транспортное средство по п.11, в котором модуль установки эффективной точки привода в ответ на переключение положения механизма переключения передач на более низкую передачу устанавливает эффективную точку привода в обновленную точку привода, характеризующуюся увеличением скорости вращения, которая увеличивается на заранее установленное значение, соответствующее второму уровню изменения в пределах выходного предела аккумуляторной батареи, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием.
14. Транспортное средство по п.1, в котором блок передачи мощности представляет собой непрерывно регулируемую передачу.
15. Способ управления транспортным средством для управления транспортным средством, оснащенным двигателем внутреннего сгорания, блоком передачи мощности и электродвигателем, причем блок передачи мощности передает, по меньшей мере, часть выходной мощности двигателя внутреннего сгорания, который приводится в движение в произвольной точке привода независимо от положения механизма переключения передач, на ось, а электродвигатель подает мощность на ось, при котором:
а) в случае отсутствия изменения положения механизма переключения передач устанавливают эффективную точку привода в заданную точку привода, определяемую согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, которое, как установлено, должно подаваться на ось, и управляют двигателем внутреннего сгорания, блоком передачи мощности и электродвигателем для приведения в движение двигателя внутреннего сгорания в установленной эффективной точке привода и для обеспечения подачи на ось приводного усилия, эквивалентного требуемому приводному усилию; и
b) в случае изменения положения механизма переключения передач устанавливают эффективную точку привода в обновленную точку привода, характеризуемую, по меньшей мере, изменением скорости вращения, из измененной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, и управляют двигателем внутреннего сгорания, блоком передачи мощности и электродвигателем для приведения в движение двигателя внутреннего сгорания в установленной эффективной точке привода и обеспечения подачи на ось приводного усилия, эквивалентного требуемому приводному усилию.
16. Способ по п.15, при котором на этапе b) в ответ на изменение положения механизма переключения передач посредством изменения водителем положения механизма переключения передач устанавливают эффективную точку привода в обновленную точку привода, характеризующуюся, по меньшей мере, изменением скорости вращения до первой скорости, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, и в ответ на изменение положения механизма переключения передач в соответствии со степенью нажатия водителем на педаль акселератора и скоростью транспортного средства независимо от изменения водителем положения механизма переключения передач устанавливают эффективную точку привода в обновленную точку привода, характеризующуюся, по меньшей мере, изменением скорости вращения до второй скорости, отличающейся от первой скорости, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием.
17. Способ по п.15, при котором на этапе b) в ответ на переключение механизма переключения передач на более высокую передачу устанавливают эффективную точку привода в обновленную точку привода, характеризующуюся уменьшением скорости вращения, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием.
18. Способ по п.15, при котором на этапе b) в ответ на переключение механизма переключения передач на более низкую передачу устанавливают эффективную точку привода в обновленную точку привода, характеризующуюся увеличением скорости вращения, из заданной точки привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием.
19. Способ по п.15, при котором на этапе b) постепенно приближают эффективную точку привода к заданной точке привода, определяемой согласно заранее установленному ограничению в соответствии с требуемым приводным усилием, с течением времени после изменения положения механизма переключения передач.
Приоритет по пунктам:
16.02.2005 по пп.1-3, 6-19;
25.08.2005 по пп.4, 5.
| ЕР 1122109 А2, 08.08.2001 | |||
| JP 10068431 А, 10.03.1998 | |||
| JP 2000224713 А, 11.08.2000 | |||
| СПОСОБ РАБОТЫ КОМБИНИРОВАННОГО ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1998 |
|
RU2223183C2 |

