Изобретение относится к области авиационной техники и касается создания скоростных вертолетов с перекрещивающимися винтами, снабженных разнесенными перекрещивающимися несущими винтами с движительно-рулевой системой по схеме Х2+2, имеющей над изломами крыла типа «чайка» два несущих трехлопастных чашеобразных винта, размещенных на вертикальных валах в обтекателях подкрыльных мотогондол, и два соосных винта в кольцевом канале с управляемым вектором тяги, размещенном над низкорасположенной хвостовой балкой на пилоне, создающем наклонную и маршевую тягу при выполнении вертикального и короткого взлета/посадки.
Известен скоростной гибридный вертолет "Eurocopter Х3" (ЕС), выполненный по технологии Х3 с ярусным расположением на концах высокорасположенного крыла двухвинтовой движительно-рулевой системы и над ней несущего винта, имеет два двигателя, передающих крутящий момент через главный редуктор и соединительные валы на несущий винт и тянущие винты, создающие при висении и управлении по курсу с компенсацией крутящего момента, вертикальное двухкилевое оперение, установленное на концах стабилизатора, и трехопорное убирающееся колесное шасси.
Признаки, совпадающие - наличие высокорасположенного крыла, двухкилевого оперения и двух турбовальных двигателей Turbomeca RTM322 мощностью по 2720 л.с., более сложного редуктора и трансмиссии валов с общей длиною 10,82 м, передающих мощность несущему и передним тянущим винтам. Несущий винт, имеющий автомат перекоса с управлением общего и циклического изменения его шага, предназначен для создания подъемной силы, а поступательное движение в скоростном полете обеспечивают тянущие винты, которые также предотвращают вращение вертолета на режиме висения при компенсации реактивного момента, возникающего при вращении несущего винта. Вращение несущего и передних двух винтов - синхронизирующее. Скоростной гибридный вертолет "Eurocopter Х3", выполненный на платформе вертолета модели ЕС 155 и рядом узлов от ЕС 175, оснащен крылом, которое, имея большое отрицательное поперечное V, снижает нагрузку на несущий винт и обеспечивает до 80% общей подъемной силы при горизонтальном полете и позволяет летать на 50% быстрее и выше, чем современные классические вертолеты, достичь скорости до 435 км/ч, дальности полета до 1248 км и иметь практический потолок 7600 м при перевозке 16 человек с топливной эффективностью 80,67 г/пасс⋅км (с учетом резерва топлива для выполнения получасового полета). Удельная нагрузка на мощность силовой установки, позволяющая при использовании 70% ее мощности и ρN=2,1, иметь целевую нагрузку 1600 кг и увеличить взлетный вес вертолета модели ЕС 155 на 30%.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет одновинтовой несущей схемы с передними винтами на концах консолей крыла, используемыми как при висении в качестве рулевых винтов, так и на крейсерских режимах полета в качестве двухвинтовых движителей, имеет повышенное аэродинамическое сопротивление, сложную схему редуцирования при независимом вращении трех винтов, но и малую весовую отдачу и радиус действия. Вторая - это то, что в вертолете одновинтовой несущей схемы имеют место непроизводительные затраты мощности, требуемой для парирования реактивного момента от несущего двумя винта тянущими винтами составляют 12-16% от мощности, потребной для вращения несущего винта, а также необходимость агрегатов крыльевой трансмиссии тянущих винтов, имеющих почти на ≈38% меньше их тягу в сравнении с соосными закапотированными винтами и создающих опасность для наземного персонала. Третья - это то, что вес передних винтов вместе с крылом и агрегатами трансмиссии составляет до 15% веса пустого вертолета и имеет тенденцию к увеличению с ростом взлетного его веса. Четвертая - это то, что крыло и хвостовое оперение не имеют механизации и поверхностей управления, что предопределяет для управления по крену и тангажу необходимость постоянного вращения нагруженного несущего винта с автоматом перекоса и при авторотации последнего не позволяет использовать его для продольно-поперечного управления. Пятая - это то, что расположение двух тянущих винтов под несущим винтом создает вредное сопротивление, приводящее к их разнотяговости, но и к значительному повышению уровня шума вследствие взаимовлияния тянущих винтов и несущего винта. Кроме того, в такой конструкции не исключается появление самовозбуждающихся колебаний, высоких переменных напряжений и вибраций, а также и других видов динамической неустойчивости конструкции, в том числе одного из опаснейших - воздушного резонанса несущего винта и, особенно, не закапотированных тянущих винтов. Шестая - это то, что при висении поток от несущего винта, обдувая консоли крыла и создавая значительную общую потерю в вертикальной его тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги несущего винта и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. А по мере роста скорости горизонтального полета проблема также усугубляется, поскольку на отступающей стороне несущего винта возникает участок, в котором абсолютная скорость его лопастей относительно воздуха становится практически нулевой, и этот участок лопастей, естественно, в создании подъемной силы не участвует, что ухудшает уравновешивание в поперечном канале, особенно, из-за расположения этого участка как раз над крылом. Седьмая - это то, что несущий винт изменяемого шага и с управлением циклического его шага значительно осложняет конструкцию, а постоянные вибрации, возникающие при работе автомата его перекоса, создают неблагоприятные условия для работы других механизмов и оборудования. Все это ограничивает при более высоком удельном расходе топлива возможность повышения дальности полета, показателей транспортной и топливной эффективности, но и уменьшения при висении непроизводительных затрат мощности, особенно, при управлении по курсу.
Известен скоростной вертолет "Sikorsky Х2" компании Sikorsky (США), выполненный по двухвинтовой схеме с соосными несущими винтами, имеет турбовальный двигатель, передающий крутящий момент через главный редуктор и систему валов трансмиссии на несущие соосные и задний толкающий винты, последний из которых установлен на конце хвостовой балки за вертикальным оперением и стабилизатором, имеющим на концах киль-шайбы, трехопорное убирающееся колесное шасси.
Признаки, совпадающие - наличие двухкилевого оперения, турбовального двигателя модели LHTEC Т800 мощностью 1360 л.с., главного редуктора и валов трансмиссии, передающих мощность четырехлопастным соосным несущим винтам диаметром 8,05 м и шестилопастному толкающему винту диаметром 1,66 м, обеспечивающими как выполнение ВВП или зависания, так и его поступательный горизонтальный скоростной полет. Вращение несущих соосных винтов - синхронизирующее и противоположно направленное. Взлетная тяговооруженность силовой установки, позволяющая при непродолжительном времени висения, достигать полезной нагрузки 1000 кг при взлетном его весе 3300 кг. Скоростной вертолет "Sikorsky Х2", имея крейсерскую скорость полета до 463 км/ч, дальность полета до 1300 км и практический потолок 7200 м, может применяться для транспортировки 5…6 человек.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет с движителем двухвинтовой соосной схемы и с задним толкающим винтом, используемым только на крейсерских режимах полета, что увеличивает паразитную массу при выполнении ВВП и уменьшает весовую отдачу и радиус действия. Вторая - это то, что вес заднего винта вместе с двухкилевым оперением и агрегатами трансмиссии заднего винта составляет до 12-15% веса пустого вертолета и имеет тенденцию к увеличению с ростом взлетного его веса. Третья - это то, что при висении соосное расположение несущих винтов изменяемого шага и с управлением циклического шага нижнего из них значительно осложняет их конструкцию, а постоянные вибрации, возникающие при работе автомата его перекоса, создающего неблагоприятные условия для работы других механизмов и оборудования. Четвертая - это то, что соосное расположение винтов создает вредную обдувку нижнего несущего винта верхним, усложняет схему редуцирования, а также значительно увеличивает массу редуктора и его высоту, что ограничивает возможности базирования. Пятая - это то, что в вертолете двухвинтовой соосной схемы с полужестким креплением лопастей имеет место неблагоприятное взаимное влияние (индуктивные потери) соосных несущих винтов, которое в отдельных случаях может приводить и к их перехлесту. Все это обеспечивает более высокий удельный расход топлива и ограничивает возможность дальнейшего повышения дальности полета, показателей транспортной и топливной эффективности, но и осложняет из-за заднего расположения на конце хвостовой балки толкающего не закапотированного винта выполнение короткого взлета/посадки (КВП).
Наиболее близким к предлагаемому изобретению является беспилотный вертолет модели "K-МАХ" компании «Катал Aerospace» (США), имеющий двухвинтовую поперечную схему с близко расположенными двухлопастными винтами и силовую установку (СУ) с двигателем, передающим крутящий момент через главный редуктор и валы на несущие винты, смонтированные на пилонах фюзеляжа, наклоненных наружу на угол β=15° от плоскости симметрии и вперед по полету на угол α=5°, вертикальное оперение со стабилизатором и трехопорное убирающееся колесное шасси.
Признаки, совпадающие - вертолет, имеющий два несущих винта, вращающихся в противоположных направлениях и расположенных со значительным перекрытием (92%) и наклоном осей вращения от вертикали. Наклон осей вращения двухлопастных винтов от плоскости симметрии наружу на угол β=15° и синхронизация их вращения обеспечивает безопасное прохождение (на высоте ≈352 мм) лопастей одного несущего винта над втулкой другого. Втулки несущих винтов имеют упрощенную конструкцию с общим горизонтальным шарниром. Турбовальный двигатель Lycoming T53-L-17A мощностью 1350 л.с. установлен сверху фюзеляжа, между несущими винтами за главным редуктором трансмиссии, который обеспечивает привод обоих перекрещивающихся несущих винтов. Беспилотный вертолет модели "K-МАХ", имеющий диаметр несущих винтов: 14,73 м, длину фюзеляжа: 12,73 м, высоту: 4,14 м, взлетный вес: 5443 кг при весе пустого: 2334 кг, максимальную/крейсерскую скорость полета: 193/185 км/ч, практический потолок: 7010 м и дальность полета: 494 км, может использоваться в специальной авиации как «летающий кран» для транспортировки грузов (массой до 2404 кг при массе топлива 705 кг) на внешней подвеске.
Причины, препятствующие поставленной задаче: первая - это то, что управление по тангажу и крену вертолета с перекрещивающимися несущими винтами обеспечивается путем изменения циклического шага лопастей, что создает неблагоприятные условия для работы других механизмов и оборудования и, особенно, когда лопасти несущих винтов наклоняются в точках перекрещивания вперед или назад, влево или вправо одновременно. Путевое управление осуществляется путем изменения дифференциального общего их шага. Вторая - это то, что для повышения безопасности обслуживающего персонала на земле при вращении отклоненных винтов по обе стороны от вертолета с перекрещивающимися несущими винтами, смонтированными на удлиненных валах в обтекателях, имеет место большая высота двух их пилонов, что увеличивает как аэродинамическое профильное сопротивление, так и массу планера и, как следствие, предопределяет значительное уменьшение скорости полета и малую весовую отдачу. Третья - это то, что хвостовое оперение не имеет поверхностей управления по тангажу, что предопределяет для управления по крену и тангажу необходимость постоянного вращения несущих винтов с автоматами их перекосов, что ограничивает стабильность поперечно-продольной управляемости. Четвертая - это то, что в вертолете двухвинтовой поперечной схемы из-за перекрещивания плоскостей вращения несущих винтов, а значит сложения подъемных сил в месте их перекрещивания, возникает момент кабрирования, то есть подъема носовой части, а его однодвигательная СУ уменьшает и безопасность. Кроме того, перекрещивающиеся несущие винты, смонтированные на длинных валах, наклоненных на углы β=15° от плоскости симметрии в каждую сторону и на угол α=5° вперед по полету, что не полностью компенсирует реактивные моменты несущих винтов в этой схеме на главном редукторе вертолета. Поэтому незначительные моменты по тангажу и курсу компенсируются рулями высоты и системой управления. Все это также ограничивает возможность дальнейшего увеличения скорости и дальности полета, но и показателей транспортной и топливной эффективности, а также выполнения технологии КВП.
Предлагаемым изобретением решается задача в указанном выше известном беспилотном вертолете модели "К-МАХ" уменьшения на 35% и 9% перекрытия несущих винтов и высоты вертолета, исключения наклона наружу осей вращения винтов и вниз их законцовок и повышения безопасности обслуживания, уменьшения потребной мощности на управление по тангажу при висении, повышения скорости и дальности полета, а также показателей топливной эффективности, но и выполнения КВП.
Отличительными признаками предлагаемого изобретения от указанного выше известного беспилотного вертолета модели "K-МАХ", наиболее близкого к нему, являются наличие того, что он выполнен по технологии многорежимного аэродинамического управления с движительно-рулевой системой (ДРС) в концепции разнесенных перекрещивающихся несущих винтов (РПНВ) от фюзеляжа по схеме РПНВ-Х2+2, имеющей над изломами крыла типа «чайка» два трехлопастных чашеобразных несущих винта, размещенных на вертикальных валах в профилированных обтекателях подкрыльных мотогондол и два соосных винта в кормовом кольцевом канале с управляемым вектором тяги, размещенном над низкорасположенной хвостовой балкой и за центром масс на кормовой гондоле и создающем наклонную и/или маршевую тягу соответственно при выполнении вертикального и короткого взлета/посадки (ВВП и КВП) или скоростного горизонтального полета, при этом внутренние секции крыла типа «чайка», выполненные с положительным углом поперечного V и в виде двух пар полукрыльев прямой и обратной стреловидности (ПКПС и ПКОС) соответственно передней и задней их пары, смонтированной соответственно в верхней передней и средней задней части соответствующей мотогондолы и образующей с левой и правой из них замкнутую конструкцию, имеющую при виде сверху как бы ромбовидную конфигурацию с концевыми стреловидными частями передней пары ПКПС, имеющими флаппероны и отрицательный угол ψ=-5° поперечного V, придающий крылу типа «чайка» как бы М-образную конфигурацию при виде спереди, причем каждая пара ПКПС и ПКОС, снабженная соответственно предкрылками и закрылками, смонтированы при виде сверху от центра масс соответственно спереди и сзади по полету так, чтобы задняя пара ПКОС, имеющая в носке крыла левый и правый синхронизирующие поперечные валы, связывающие соответствующие консольные редукторы газотурбинных двигателей (ГТД), выполненных с задним выводом вала для отбора через муфты сцепления взлетной их мощности, с синхронизирующим редуктором, смонтированным совместно с кормовым редуктором, имеющим задний вывод удлиненного вала для толкающих с противоположным вращением соосных винтов, вынесенных по оси симметрии за центроплан ПКОС к задней части кормового кольцевого канала (ККК), снабженного профилированными ребрами жесткости и закрепленного снаружи на вертикальном пилоне хвостовой балки и размещенного при виде спереди между двух килей вертикального оперения, каждый из которых имеет нижние меньшие и верхние большие кили с рулями направления, отклоненные наружу и вовнутрь соответственно от и к плоскости симметрии, при этом каждый чашеобразный несущий винт, имеющий как возможность свободного его вращения и безопасного прохождения лопастей одного несущего винта над втулкой другого так, чтобы наступающие его лопасти проходили над фюзеляжем от кормовой его части к носовой и, тем самым, при выполнении режима ВВП и зависания создавали и исключение условий схлестывания лопастей, и гармоничное сочетание поперечного и путевого управления, так и жесткое крепление лопастей и без изменения циклического их шага, но и возможность изменения общего его шага и автоматической установки его лопастей в положение их авторотации для осуществления аварийного режима посадки, выполнен с саблевидными лопастями, закрепленными перпендикулярно к конусной боковой поверхности чашеобразной втулки винта, образующей конус несущего винта и выполненной в виде соответствующего усеченного конуса, имеющего угол конуса α=180°-2β1, град (где: α - угол, образующий конусную поверхность; β1=5,5° - угол между каждой лопастью несущего винта и линией, размещенной перпендикулярно вертикальной оси его вращения), причем центральный ККК с четырехлопастными соосными винтами двухвинтовой ДРС, имеющими как жесткое крепление лопастей, так и возможность изменения общего их шага и установки их лопастей во флюгерное положение после их остановки и фиксации для осуществления аварийного режима посадки с авторотирующими несущими винтами, но и возможность создания интенсивной обдувки после предварительного синфазного отклонения развитых горизонтальных рулевых поверхностей ККК, изменяющих продольную балансировку при выполнении режима ВВП и зависания, установленных на выходе снизу и сверху на величину половины радиуса тяговых винтов от центра ККК и имеющих отогнутые их концы к центру ККК, причем при выполнении режима ВВП и зависания плавное перераспределение мощности от двух ГТД обеспечивается синхронизирующим и консольными редукторами на несущие винты и ДРС с соосными винтами в ККК соответственно 88% и 12% от располагаемой взлетной их мощности, при этом соосные винты в ККК, создающие маршевую тягу для горизонтального скоростного полета, выполнены с большой круткой их саблевидных лопастей, как у вентилятора, и возможностью обеспечения как первой меньшей и второй средней, так и большей скорости соответственно после как короткого взлета, так и вертикального взлета в полетной конфигурации винтокрыла или крылатого автожира в перегрузочном его варианте на 15% и 5% больше от нормального взлетного веса или с нормальным взлетным весом при вращающихся несущих винтах соответственно на режимах с нагруженными несущими винтами и/или близком к их самовращению при создании ими пропульсивной тяги совместно с маршевой тягой соосных винтов в ККК, обеспечиваемой работающими ГТД, выдающими 77% и 67% или 62% от взлетной их мощности СУ, 55% мощности из которых перераспределяется через выходные поперечные валы синхронизирующего редуктора на редуктор соосных винтов ККК, а остальные из 77% и 67% или 62% мощности перераспределяются через синхронизирующий и консольные редукторы соответственно поровну на несущие винты, но и обратно.
Кроме того, с целью повышения скорости горизонтального полета и тяговооруженности комбинированной его СУ, двухвинтовая ДРС которой в упомянутом ККК выполнена в виде двухрядного биротативного турбовинтовентилятора и газодинамическим его приводом от упомянутых ГТД, имеющих каждый степень сжатия воздуха (πк) не менее 15,0 в статических условиях в их компрессорах высокого давления, но и систему отбора газа и доставки его потока на привод винтовентилятора, который включает турбину с валом привода винтовентилятора, дополнительную камеру сгорания с регулятором расхода топлива и запалом, центральное тело, канал подвода газа к турбине винтовентилятора, канал отвода газов и топливопровод, который при выполнении КВП используется для подачи топлива в дополнительную камеру сгорания винтовентилятора, затем после короткого взлета в перегрузочном варианте и перехода на поступательный горизонтальный скоростной полет система подвода топлива частично перекрывается при одновременном увеличении подвода газа к турбине винтовентилятора от одного из работающих ГТД, отключенного от системы трансмиссии привода несущих винтов и, значит, при таком способе его дросселирования доля газа, отбираемого от двух работающих ГТД на привод винтовентилятора, по мере снижения отбора мощности на несущие винты от взлетной мощности другого ГТД, позволяющего увеличить отбор газа и от него, а при больших величинах заданного отбора газа для поддержания заданного значения маршевой тяги винтовентилятора при требуемой подаче топлива в камеру его сгорания уменьшается, то по мере опережающего его дросселирования компенсаторный при этом отбор газа от двух ГТД увеличивается.
Кроме того, с целью улучшения аэродинамических характеристик и уменьшения при скоростном горизонтальном полете лобового сопротивления профиля каждого несущего винта, связанное с уменьшением хорды на конце каждой его лопасти, имеющей упомянутую саблевидную форму в плане с заостренной по направлению к ее концу оживальной законцовки оптимизированной для горизонтального полета на большой скорости, представляющей собой эффективное средство для уменьшения неблагоприятных последствий сжимаемости воздуха, в частности появления скачков уплотнения при увеличении хорды за пределами некоторого поперечного сечения, располагающегося примерно в расширяющейся зоне на участке от 5/12 до 5/6 полного радиуса каждой лопасти R и смещенной в направлении вперед таким образом, чтобы уравновесить определенное смещение назад ее оживальной законцовки, имеющей на ее конце переднюю кромку с углом стреловидности, составляющим χ=44° и способствующим появлению интенсивных и устойчивых вихрей, которые отодвигают границу срыва потока, особенно, в том случае, когда данная лопасть движется в направлении, противоположном направлению поступательного полета при зависании, при этом с целью возможности как отодвинуть границы срыва потока, так и обеспечить выигрыш в мощности на больших скоростях горизонтального полета каждая лопасть в некоторой зоне на ее конце, располагающейся на участке между от 5/6 R до полного радиуса каждой лопасти R, т.е. размаха данной лопасти с учетом заостренной ее оживальной законцовки, имеет увеличенную степень некоторой линейной аэродинамической крутки с некоторой полной амплитудой, величина которой заключена в диапазоне от -7° до -12°, между центром каждого несущего винта и свободной оживальной законцовкой каждой лопасти, причем с целью возможности уменьшить нежелательные эффекты, связанные со сжимаемостью воздуха, относительная толщина профиля каждой лопасти поддерживается на уровне от 14 до 12% на той части лопасти, где хорда имеет относительно небольшую длину, т.е. до элементарного поперечного сечения, располагающегося на уровне примерно от корневой ее части до 5/12 полного размаха каждой лопасти, имеющей на полном ее размахе профили между элементарным поперечным сечением, располагающимся в зоне на участке от 5/12 полного размаха каждой лопасти до конца каждой лопасти, относительная толщина которой уменьшается как бы линейным образом, образующим двукратное ее относительное утончение до уровня от 7 до 6%, в частности, на заостренном участке между началом и концом оживальной законцовки каждой лопасти, имеющей отклоненную ее законцовку вниз на угол β1=5,5°, образуя в радиальном направлении вдоль всей протяженности полного размаха лопасти как бы усеченную ее клиновидность при виде сбоку с горизонтально расположенной законцовкой, отогнутой вниз по линии отгиба от точки сопряжения задней кромки на участке ее изгиба в плане назад против ее вращения.
Кроме того, с целью улучшения появления интенсивных вихрей, отодвигающих границу срыва потока каждая упомянутая лопасть, выполненная, например, из композиционных материалов, с одновременным формованием вдоль всей протяженности ее полного размаха R участков на ряд четных разновеликих зон как на ее верхней, так и нижней поверхностях, имеющих от ее начала соответственно как от первой все нечетные, так и от второй все четные зоны, выполненные с утолщениями до 0,5 мм, имеющими в соответствующей зоне как передние кромки, размещенные по середине от центра давления лопасти к ее передней кромке, так и удвоенную длину от ширины утолщений, равной b=5/9 аэродинамической хорде лопасти, но и соответствующие утонченности как к передней и задней его кромкам, выполненным соответственно дугообразной и пилообразной формы в плане в соответствующей зоне, так и от толщины 0,5 мм каждого утолщения к утонченностям каждой из трехгранных боковых его сторон, выполненных как бы по радиусам соответствующей зоны, каждая из которых, начиная от конца лопасти ее четное нижнее утолщение с последующим нечетным верхним утолщением образуют как бы синусоидальную конфигурацию при виде сбоку вдоль полного ее размаха R, имеющей отклоненную ее законцовку вниз на угол 2β1.
Благодаря наличию этих признаков, позволяющих выполнить скоростной вертолет с перекрещивающимися винтами (СВПВ), который выполнен по технологии многорежимного аэродинамического управления с движительно-рулевой системой (ДРС) в концепции разнесенных перекрещивающихся несущих винтов (РПНВ) от фюзеляжа по схеме РПНВ-Х2+2, имеющей над изломами крыла типа «чайка» два трехлопастных чашеобразных несущих винта, размещенных на вертикальных валах в профилированных обтекателях подкрыльных мотогондол и два соосных винта в кормовом кольцевом канале с управляемым вектором тяги, размещенном над низкорасположенной хвостовой балкой и за центром масс на кормовой гондоле и создающем наклонную и/или маршевую тягу соответственно при выполнении вертикального и короткого взлета/посадки (ВВП и КВП) или скоростного горизонтального полета. При этом внутренние секции крыла типа «чайка», выполненные с положительным углом поперечного V и в виде двух пар полукрыльев прямой и обратной стреловидности (ПКПС и ПКОС) соответственно передней и задней их пары, смонтированной соответственно в верхней передней и средней задней части соответствующей мотогондолы и образующей с левой и правой из них замкнутую конструкцию, имеющую при виде сверху как бы ромбовидную конфигурацию с концевыми стреловидными частями передней пары ПКПС, имеющими флаппероны и отрицательный угол ψ=-5° поперечного V, придающий крылу типа «чайка» как бы М-образную конфигурацию при виде спереди. Каждая пара ПКПС и ПКОС, снабженная соответственно предкрылками и закрылками, смонтированы при виде сверху от центра масс соответственно спереди и сзади по полету так, чтобы задняя пара ПКОС, имеющая в носке крыла левый и правый синхронизирующие поперечные валы, связывающие соответствующие консольные редукторы газотурбинных двигателей (ГТД), выполненных с задним выводом вала для отбора через муфты сцепления взлетной их мощности, с синхронизирующим редуктором, смонтированным совместно с кормовым редуктором, имеющим задний вывод удлиненного вала для толкающих с противоположным вращением соосных винтов, вынесенных по оси симметрии за центроплан ПКОС к задней части кормового кольцевого канала (ККК), снабженного профилированными ребрами жесткости и закрепленного снаружи на вертикальном пилоне хвостовой балки и размещенного при виде спереди между килей вертикального оперения, каждый из которых имеет нижние меньшие и верхние большие кили с рулями направления, отклоненные наружу и вовнутрь соответственно от и к плоскости симметрии. При этом каждый чашеобразный несущий винт, имеющий как возможность свободного его вращения и безопасного прохождения лопастей одного несущего винта над втулкой другого так, чтобы наступающие его лопасти проходили над фюзеляжем от кормовой его части к носовой и, тем самым, при выполнении режима ВВП и зависания создавали и исключение условий схлестывания лопастей, и гармоничное сочетание поперечного и путевого управления, так и жесткое крепление лопастей и без изменения циклического их шага, но и возможность изменения общего его шага и автоматической установки его лопастей в положение их авторотации для осуществления аварийного режима посадки, выполнен с саблевидными лопастями, закрепленными перпендикулярно к конусной боковой поверхности чашеобразной втулки винта, образующей конус несущего винта и выполненной в виде соответствующего усеченного конуса, имеющего угол конуса α=180°-2β1, град (где: α - угол, образующий конусную поверхность; β1=5,5° - угол между каждой лопастью несущего винта и линией, размещенной перпендикулярно вертикальной оси его вращения). Центральный ККК с четырехлопастными соосными винтами двухвинтовой ДРС, имеющими как жесткое крепление лопастей, так и возможность изменения общего их шага и установки их лопастей во флюгерное положение после их остановки и фиксации для осуществления аварийного режима посадки с авторотирующими несущими винтами, но и возможность создания интенсивной обдувки после предварительного синфазного отклонения развитых горизонтальных рулевых поверхностей ККК, изменяющих продольную балансировку при выполнении режима ВВП и зависания, установленных на выходе снизу и сверху на величину половины радиуса тяговых винтов от центра ККК и имеющих отогнутые их концы к центру ККК. Причем при выполнении режима ВВП и зависания плавное перераспределение мощности от двух ГТД обеспечивается синхронизирующим и консольными редукторами на несущие винты и ДРС с соосными винтами в ККК соответственно 88% и 12% от располагаемой взлетной их мощности. При этом соосные винты в ККК, создающие маршевую тягу для горизонтального скоростного полета, выполнены с большой круткой их саблевидных лопастей, как у вентилятора, и возможностью обеспечения как первой меньшей и второй средней, так и большей скорости соответственно после как короткого взлета, так и вертикального взлета в полетной конфигурации винтокрыла или крылатого автожира в перегрузочном его варианте на 15% и 5% больше от нормального взлетного веса или с нормальным взлетным весом при вращающихся несущих винтах соответственно на режимах с нагруженными несущими винтами и/или близком к их самовращению при создании ими пропульсивной тяги совместно с маршевой тягой соосных винтов в ККК, обеспечиваемой работающими ГТД, выдающими 77% и 67% или 62% от взлетной их мощности СУ, 55% мощности из которых перераспределяется через выходные поперечные валы синхронизирующего редуктора на редуктор соосных винтов ККК, а остальные из 77% и 67% или 62% мощности перераспределяются через синхронизирующий и консольные редукторы соответственно поровну на несущие винты, но и обратно. При авторотации или на режимах, близких к самовращению несущих винтов, срыв потока на перекрещивающихся их лопастях отодвигается на более высокие скорости полета, что позволит из-за аэродинамической симметрии относительно центра масс исключить потерю подъемной силы из-за срыва потока с отступающих их лопастей на режиме горизонтального скоростного полета и, как следствие, достичь скорости полета 460 или 445 км/ч соответственно. Все это позволит повысить скороподъемность, скорость и дальность полета СВПВ исполнения РПНВ-Х2+2, являющейся наиболее эффективной схемой перспективного винтокрылого аппарата при выполнении операций с вертикальным подъемом грузов, так как она с чашеобразными несущими винтами, имеющими лопасти с оживальными законцовками, отогнутыми вниз, обеспечивает улучшение характеристик на режиме висения и уменьшение расхода мощности, массы конструкции, уровня шума, вибраций, затрат на техническое обслуживание. Кроме того, это позволит также увеличить полезную нагрузку, взлетный вес и весовую отдачу, но и повысить безопасность, транспортную и топливную эффективность при скоростном горизонтальном полете и, особенно, СВПВ с комбинированной его СУ.
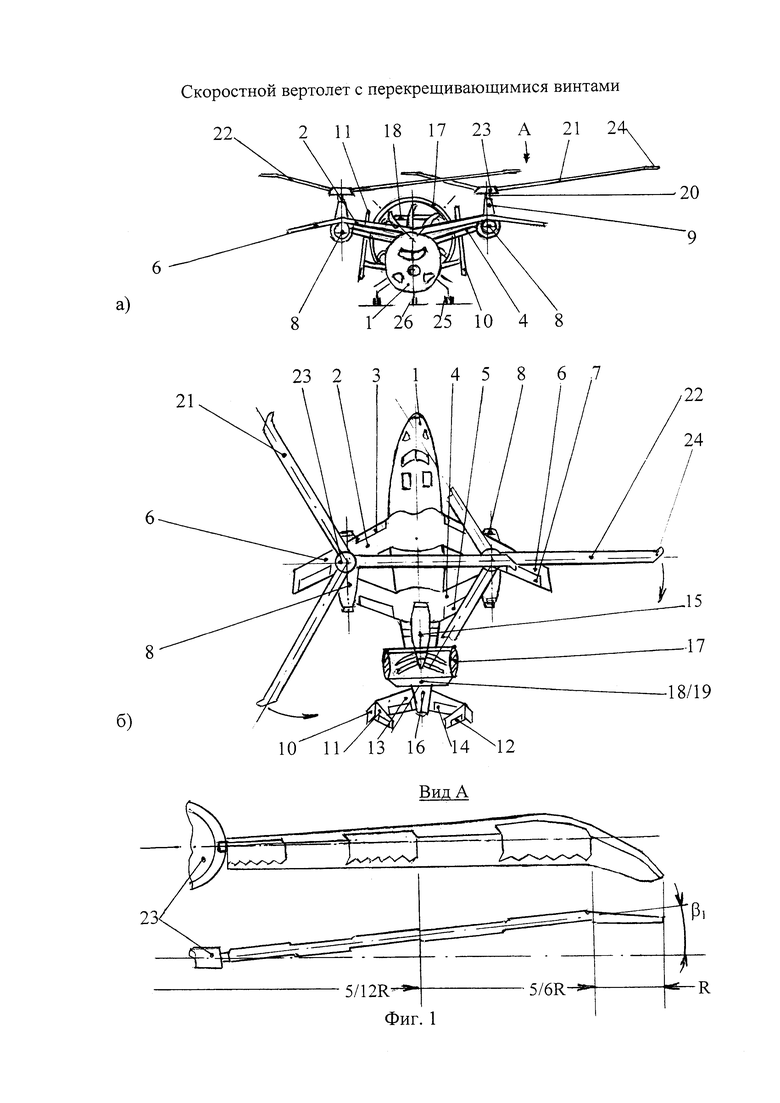
Предлагаемое изобретение СВПВ с несущими чашеобразными винтами и ДРС с задним расположением биротативного двухрядного винтовентилятора в ККК, обеспечивающих варианты его использования, иллюстрируются общими видами на фиг. 1.
На фиг. 1 изображен СВПВ исполнения РПНВ-Х2+2 на общих видах спереди и сверху соответственно а) к б) с межгондольными двумя парами ПКПС и ПКОС, образующими с двумя мотогондолами ромбовидное крыло в плане, имеющее стреловидные концевые части ПКПС и разгружающее несущие винты при его использовании:
а) в полетной конфигурации крылатого автожира или винтокрыла с несущей и движительной системами, включающей крыло типа «чайка» совместно с несущими перекрещивающимися чашеобразными винтами, авторотирующими или вращающимися на режиме, близком к их самовращению, и двухрядный винтовентилятор с центральным ККК в кормовой гондоле, создающие пропульсивную и реактивную тягу;
б) в полетной конфигурации вертолета двухвинтовой несущей схемы с двухвинтовой ДРС, включающей в системе РПНВ-Х2+2, несущие перекрещивающиеся левый и правый винты которой при виде сверху имеют вращение против и по часовой стрелке соответственно, размещенными в плане с соответствующими их лопастями перпендикулярно к плоскости симметрии, направленные к ней и от нее.
Многоцелевой СВПВ, представленный на фиг. 1, выполнен по двухвинтовой поперечной схеме РПНВ-Х2+2, содержит фюзеляж 1 и умеренного удлинения высокорасположенное крыло типа «чайка», включающее две пары ПКПС 2 с предкрылками 3 и ПКОС 4 с закрылками 5 (см. фиг. 1б), при этом ПКПС 2 имеет стреловидные концевые части 6 с флапперонами 7 и подкрыльные мотогондолы 8 с передними профилированными вертикальными обтекателями 9, выполненными каплевидной формы в плане и снабженными консольными редукторами (на фиг. 1 не показаны). Двухкилевое оперение, имеющее нижние меньшие 10 и верхние большие 11 кили с рулями направления 12, отклоненные наружу и вовнутрь соответственно от и к плоскости симметрии, установлено на концах стреловидного стабилизатора 13 с рулями высоты 14. Кормовая гондола 15, смонтированная на центроплане ПКОС 4 и над низкорасположенной хвостовой балкой 16, имеет двухрядный биротативный турбовинтовентилятор ДРС в корпусе центрального ККК 17, закрепленного на хвостовом пилоне (на фиг. 1 не показаны) и имеющего на выходе верхний 18 и нижний 19 развитые горизонтальные рулевые поверхности, изменяющие продольную балансировку при выполнении режима ВВП и зависания, установленные снизу и сверху на величину половины радиуса винтовентилятора от центра ККК 17 и имеющие отогнутые их концы к центру ККК 17 (см. фиг. 1б). Несущая двухвинтовая поперечная схема размещена на вертикальных валах 20 обтекателей 9, отклоненных вперед на угол α=5°, имеет несущие перекрещивающиеся чашеобразные трехлопастные винты левый 21 и правый 22, лопасти которых смонтированы перпендикулярно к конусной боковой поверхности чашеобразной втулки 23 под углом (β1 - это угол между каждой лопастью несущего винта и линией, размещенной перпендикулярно вертикальной оси его вращения), равным β1=5,5°. Каждая саблевидная в плане их лопасть с оживальной законцовкой 24, отклоненной вниз на угол β1=5,5°, образует как бы при виде сбоку горизонтально расположенную законцовку, отогнутую вниз. Во время аварийной посадки на режиме авторотации двух несущих перекрещивающихся винтов 21-22 для разгрузки крыла типа «чайка» его закрылки 5 и флаппероны 7 с предкрылками 3 автоматически отклоняются на углы 40° и 20° соответственно, а при выполнении вертикального взлета/посадки и висения для уменьшения потерь в вертикальной их тяге - на углы 75° и 47°. Консольные редукторы в обтекателях 9 разнесены от оси симметрии фюзеляжа 1 на расстоянии, обеспечивающем при этом безопасное прохождение лопастей 21 одного несущего винта над втулкой 23 другого (см. фиг. 1а) и свободное вращение перекрещивающихся 21-22 винтов, выполненных с жестким креплением лопастей и без изменения циклического их шага. Центральный ККК 17, увеличивающий несущую способность крыла типа «чайка» с секциями 2, 4 и 6, позволяет с последними снизить нагрузку на несущие винты 21-22, уменьшить на всех них угол атаки каждой отступающей лопасти, но и избежать срыва потока на них. На вертолетных режимах полета между несущими винтами, имеющими полную компенсацию реактивных крутящих их моментов при противоположном направлении их вращения в перекрещивающей группе винтов 21 и 22 (см. фиг. 1б). Имеется дублированная стабилизирующая система, обеспечивающая на режиме висения и на переходных режимах полета стабилизацию продольного и поперечного положения СВПВ и стабилизацию по угловой скорости тангажа и крена, но и демпфирования рыскания и изменения высоты его полета.
Комбинированная СУ имеет два (на фиг. 1 не показаны) ГТД, расположенных в удобообтекаемых подкрыльных мотогондолах 8 по обе стороны от оси симметрии, смонтированных в изломах секций ПКПС 2 и концевой части 6 крыла типа «чайка». Для улучшения взлетно-посадочных характеристик и уменьшения вибрации от трехлопастных несущих винтов на режиме висения концы лопастей несущих винтов 21-22 имеют шумопонижающие оживальные законцовки, отогнутые вниз и противоположную сторону вращения винтов (см. фиг. 1б). Мощность от ГТД передается несущим 21-22 винтам и двухрядному биротативному турбовинтовентилятору в ККК 17, посредством соответственно синхронизирующих поперечных валов, связывающих соответствующие консольные редукторы в обтекателях 9 ГТД, выполненных с задним выводом вала для отбора через муфты сцепления взлетной их мощности, с синхронизирующим редуктором, смонтированным в центроплане ПКОС 4 и газодинамическим приводом от упомянутых ГТД (на фиг. 1 не показаны). Избыточная тяговооруженность СУ, обеспечивающая вертикальный взлет, посадку и висение, предопределяет как возможность легко реализовать выполнение технологии ВВП и КВП, так и создания дополнительной пропульсивной тяги и повышения скорости горизонтального поступательного полета. В случае отказа двух ГТД, то возможна посадка СВПВ в полетной конфигурации крылатого автожира на режиме авторотации несущих винтов 21-22. Трехопорное колесное шасси, главные опоры с убирающимися колесами 25 смонтированы в боковых передних отсеках фюзеляжа 1, вспомогательная неубирающаяся опора с колесом 26 на конце тонкой низкорасположенной хвостовой балки 16.
Управление многоцелевым СВПВ обеспечивается общим и дифференциальным изменением шага перекрещивающихся несущих 21-22 винтов, но и отклонением рулевых поверхностей: как при висении рулей тангажа 18-19, обдуваемых двухрядным винтовентилятором, изменяя их шаг, так и скоростном горизонтальном полете - флапперонов 7, рулей направления 12 и высоты 14, работающих в зоне активного обдува этих винтов. При крейсерском полете подъемная сила создается секциями ПКПС 2, ПКОС 4 и концевой частью 6 крыла типа «чайка» и несущими 21-22 винтами, основная и вспомогательная маршевая тяга - соответственно двухрядным винтовентилятором ККК 17 и несущими винтами перекрещивающейся 21-22 группы, на режиме висения только двумя несущими 21-22 винтами, на режиме перехода - секциями ПКПС 2, ПКОС 4 и концевой частью 6 крыла типа «чайка» с несущими 21-22 винтами. При переходе к вертикальному взлету-посадке (висению) предкрылки 3, закрылки 5 и флаппероны 7 крыла типа «чайка» отклоняются на максимальные их углы синхронно с обеспечением передачи взлетной мощности на несущие 21-22 винты. После создания необходимой подъемной тяги несущими 21-22 винтами обеспечиваются вертолетные режимы полета. При его полетной конфигурации вертолета двухвинтовой поперечной схемы реактивные моменты несущих винтов компенсируются полностью за счет взаимно противоположного их вращения между несущими 21-22 винтами (см. фиг. 1б). При висении на вертолетных режимах полета продольное управление СВПВ осуществляется предварительным отклонением развитых рулей тангажа 18-19, с последующим их обдувом двухрядным винтовентилятором ККК 17. Путевое управление обеспечивается соответствующим дифференциальным изменением крутящих моментов несущих 21-22 винтов. Поперечное управление обеспечивается несущими левым 21 и правым 22 винтами, осуществляющими поперечную балансировку при одновременном изменении шага винтов этой перекрещивающейся группы.
После вертикального взлета и набора высоты для перехода на крейсерский режим полета убираются предкрылки 3, закрылки 5 и флаппероны 7 крыла типа «чайка» и система управления двигателей с трансмиссией обеспечивает плавное перераспределение взлетной мощности СУ при переходе в режим горизонтального полета с несущих 21-22 винтов на двухрядный винтовентилятор ККК 17 (см. фиг. 1б). После чего производится горизонтальный крейсерский скоростной полет СВПВ в полетной конфигурации двухвинтового крылатого автожира с ДРС, при котором путевое управление обеспечивается рулями направления 12 двухкилевого оперения 11. Продольное и поперечное управление СВПВ при горизонтальном его полете осуществляется синфазным и дифференциальным отклонением рулей высоты 14 и флапперонов 7 концевой части 6 ПКПС 2 соответственно. При этом исключение от продольного и поперечного управления СВПВ и, особенно, поперечного его управления несущих 21-22 винтов не изменит аэродинамической симметрии несущей системы, что позволит отодвинуть срыв потока на лопастях несущих винтов на более высокие скорости полета и достичь скорости горизонтального полета до 460-445 км/ч. На крейсерских режимах скоростного полета при создании маршевой тяги задним двухрядным винтовентилятором ККК 17 и пропульсивной тяги его несущими 21-22 винтами соответственно ДРС и перекрещивающейся их группой винтов имеют взаимно противоположное их вращения в ДРС и несущей группе 21-22 винтов и, тем самым, соответственно увеличивают КПД этих винтовентиляторов и несущих винтов, обеспечивают более плавное обтекание хвостового оперения и крыла типа «чайка» и весьма повышают эффективность движительной системы и несущей группы чашеобразных винтов.
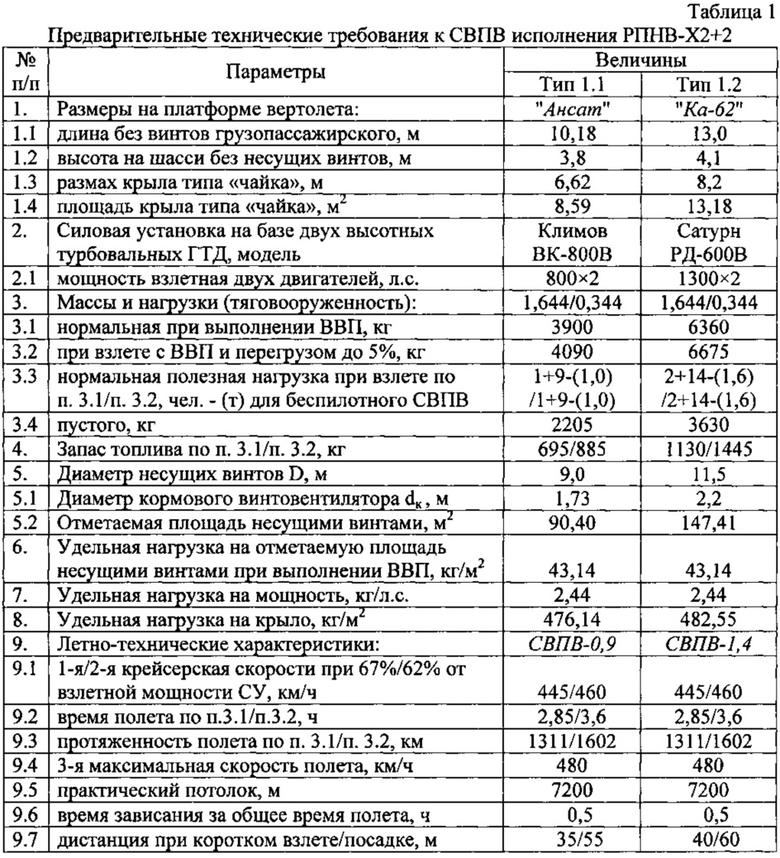
Таким образом, СВПВ исполнения РПНВ-Х2+2 имеет над изломами крыла типа «чайка» два несущих перекрещивающихся трехлопастных чашеобразных винта, размещенных на вертикальных валах в обтекателях подкрыльных мотогондол и двухрядного биротативного турбовинтовентилятора в ККК с управляемым вектором тяги, размещенном над низкорасположенной хвостовой балкой на пилоне. Выбор такой аэродинамической схемы не случаен, т.к. подобная компоновка, обладая аэродинамической симметрией, исключает потерю подъемной силы из-за срыва потока с отступающих лопастей несущих винтов на режиме горизонтального полета, компенсируя оную их противовращением. Поэтому только на базе имеющихся конструкций вертолетов можно, сокращая сроки освоения СВПВ, проводить дальнейшие исследования по созданию широкого их семейства, включая и многоцелевого СВПВ-1,4, что позволит реализовать реально высокие технико-экономические результаты (см. табл. 1).
| название | год | авторы | номер документа |
|---|---|---|---|
| СКОРОСТНОЙ СИНХРОКОПТЕР-АМФИБИЯ | 2016 |
|
RU2645515C2 |
| СКОРОСТНОЙ ВИНТОКРЫЛ-АМФИБИЯ | 2016 |
|
RU2627965C1 |
| БЕСПИЛОТНЫЙ ВИНТОКРЫЛ С ПЕРЕКРЕЩИВАЮЩИМИСЯ ВИНТАМИ | 2016 |
|
RU2627963C1 |
| МНОГОЦЕЛЕВОЙ МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2016 |
|
RU2629483C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2618832C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| БЕСПИЛОТНЫЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2629482C1 |
| ПАЛУБНЫЙ АВИАЦИОННЫЙ БЕСПИЛОТНЫЙ ПРОТИВОЛОДОЧНЫЙ КОМПЛЕКС (ПАБПК) | 2017 |
|
RU2684160C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН С КАНАЛЬНЫМИ ВИНТАМИ | 2016 |
|
RU2629473C1 |
| СКОРОСТНОЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2015 |
|
RU2609856C1 |
Изобретение относится к области авиационной техники, в частности к конструкциям скоростных вертолетов. Скоростной вертолет с перекрещивающимися винтами (СВПВ) имеет двухвинтовую поперечную схему, силовую установку (СУ) с двигателем, передающим крутящий момент через главный редуктор и валы на несущие винты, вертикальное оперение со стабилизатором и трехопорное убирающееся колесное шасси. СВПВ выполнен по технологии многорежимного аэродинамического управления с движительно-рулевой системой (ДРС) в концепции разнесенных перекрещивающихся несущих винтов (РПНВ) от фюзеляжа по схеме РПНВ-Х2+2, имеющей над изломами крыла типа «чайка» два трехлопастных несущих чашеобразных винта. Несущие винты размещены на вертикальных валах в профилированных обтекателях подкрыльных мотогондол. Два соосных винта в кормовом кольцевом канале с управляемым вектором тяги размещены над низкорасположенной хвостовой балкой и за центром масс на кормовой гондоле и создают наклонную и/или маршевую тягу соответственно при выполнении вертикального и короткого взлета/посадки или скоростного горизонтального полета. Достигается уменьшение потребной мощности на управление по тангажу при висении, повышение скорости и дальности полета, топливной эффективности. 3 з.п. ф-лы, 1 ил.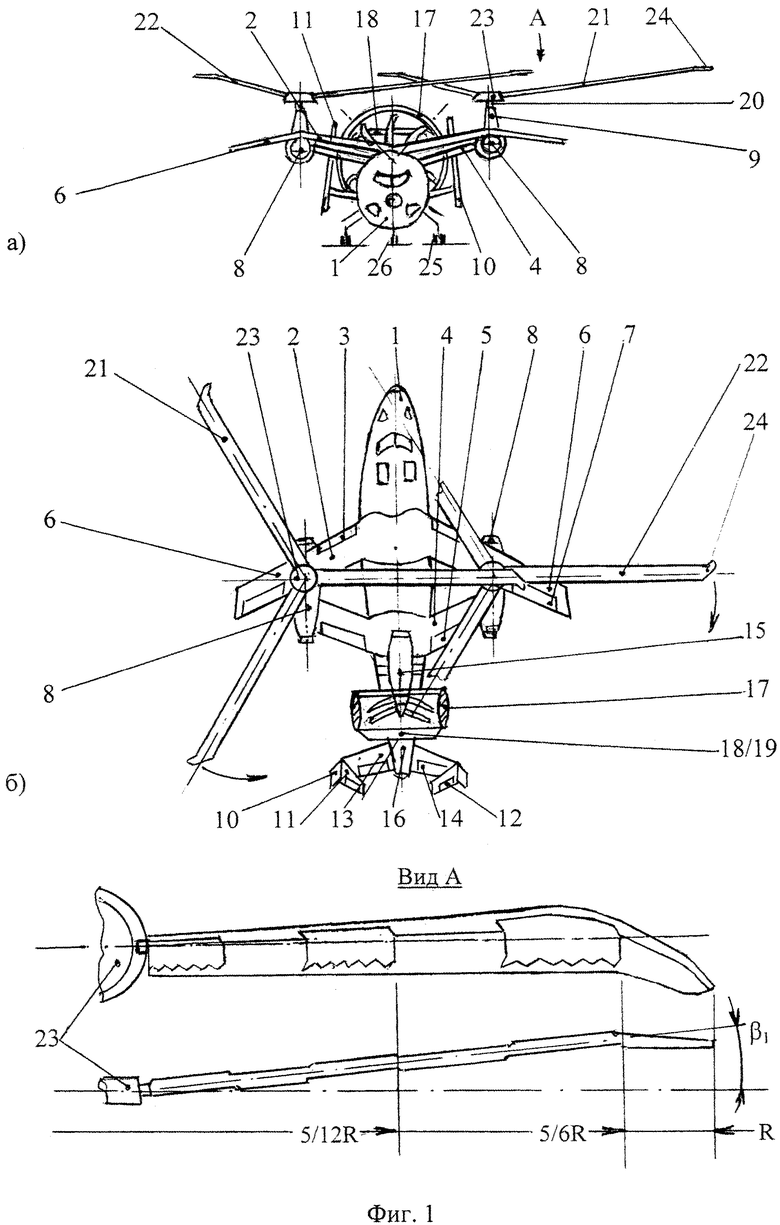
1. Скоростной вертолет с перекрещивающимися винтами, имеющий двухвинтовую поперечную схему и силовую установку (СУ) с двигателем, передающим крутящий момент через главный редуктор и валы на несущие винты, вертикальное оперение со стабилизатором и трехопорное убирающееся колесное шасси, отличающийся тем, что он выполнен по технологии многорежимного аэродинамического управления с движительно-рулевой системой (ДРС) в концепции разнесенных перекрещивающихся несущих винтов (РПНВ) от фюзеляжа по схеме РПНВ-Х2+2, имеющей над изломами крыла типа «чайка» два трехлопастных чашеобразных несущих винта, размещенных на вертикальных валах в профилированных обтекателях подкрыльных мотогондол, и два соосных винта в кормовом кольцевом канале с управляемым вектором тяги, размещенном над низкорасположенной хвостовой балкой и за центром масс на кормовой гондоле и создающем наклонную и/или маршевую тягу соответственно при выполнении вертикального и короткого взлета/посадки (ВВП и КВП) или скоростного горизонтального полета, при этом внутренние секции крыла типа «чайка», выполненные с положительным углом поперечного V и в виде двух пар полукрыльев прямой и обратной стреловидности (ПКПС и ПКОС) соответственно передней и задней их пары, смонтированной соответственно в верхней передней и средней задней части соответствующей мотогондолы и образующей с левой и правой из них замкнутую конструкцию, имеющую при виде сверху как бы ромбовидную конфигурацию с концевыми стреловидными частями передней пары ПКПС, имеющими флаппероны и отрицательный угол ψ=-5° поперечного V, придающий крылу типа «чайка» как бы М-образную конфигурацию при виде спереди, причем каждая пара ПКПС и ПКОС, снабженная соответственно предкрылками и закрылками, смонтированы при виде сверху от центра масс соответственно спереди и сзади по полету так, чтобы задняя пара ПКОС, имеющая в носке крыла левый и правый синхронизирующие поперечные валы, связывающие соответствующие консольные редукторы газотурбинных двигателей (ГТД), выполненных с задним выводом вала для отбора через муфты сцепления взлетной их мощности, с синхронизирующим редуктором, смонтированным совместно с кормовым редуктором, имеющим задний вывод удлиненного вала для толкающих с противоположным вращением соосных винтов, вынесенных по оси симметрии за центроплан ПКОС к задней части кормового кольцевого канала (ККК), снабженного профилированными ребрами жесткости и закрепленного снаружи на вертикальном пилоне хвостовой балки и размещенного при виде спереди между двух килей вертикального оперения, каждый из которых имеет нижние меньшие и верхние большие кили с рулями направления, отклоненные наружу и вовнутрь соответственно от и к плоскости симметрии, при этом каждый чашеобразный несущий винт, имеющий как возможность свободного его вращения и безопасного прохождения лопастей одного несущего винта над втулкой другого так, чтобы наступающие его лопасти проходили над фюзеляжем от кормовой его части к носовой, так и жесткое крепление лопастей и без изменения циклического их шага, но и возможность изменения общего его шага и автоматической установки его лопастей в положение их авторотации для осуществления аварийного режима посадки, выполнен с саблевидными лопастями, закрепленными перпендикулярно к конусной боковой поверхности чашеобразной втулки винта, образующей конус несущего винта и выполненной в виде соответствующего усеченного конуса, имеющего угол конуса α=180°-2β1, град (где: α - угол, образующий конусную поверхность; β1=5,5° - угол между каждой лопастью несущего винта и линией, размещенной перпендикулярно вертикальной оси его вращения), причем центральный ККК с четырехлопастными соосными винтами двухвинтовой ДРС, имеющими как жесткое крепление лопастей, так и возможность изменения общего их шага и установки их лопастей во флюгерное положение после их остановки и фиксации для осуществления аварийного режима посадки с авторотирующими несущими винтами, но и возможность создания интенсивной обдувки после предварительного синфазного отклонения развитых горизонтальных рулевых поверхностей ККК, изменяющих продольную балансировку при выполнении режима ВВП и зависания, установленных на выходе снизу и сверху на величину половины радиуса тяговых винтов от центра ККК и имеющих отогнутые их концы к центру ККК, причем при выполнении режима ВВП и зависания плавное перераспределение мощности от двух ГТД, при этом соосные винты в ККК, создающие маршевую тягу для горизонтального скоростного полета, выполнены с большой круткой их саблевидных лопастей, как у вентилятора, и возможностью обеспечения как первой меньшей и второй средней, так и большей скорости соответственно после как короткого взлета, так и вертикального взлета в полетной конфигурации винтокрыла или крылатого автожира.
2. Скоростной вертолет с перекрещивающимися винтами по п. 1, отличающийся тем, что двухвинтовая ДРС в упомянутом ККК выполнена в виде двухрядного биротативного турбовинтовентилятора с газодинамическим ее приводом от упомянутых ГТД, имеющих каждый степень сжатия воздуха (πк) не менее 15,0 в статических условиях в их компрессорах высокого давления, но и систему отбора газа и доставки его потока на привод винтовентилятора, который включает турбину с валом привода винтовентилятора, дополнительную камеру сгорания с регулятором расхода топлива и запалом, центральное тело, канал подвода газа к турбине винтовентилятора, канал отвода газов и топливопровод, который при выполнении КВП используется для подачи топлива в дополнительную камеру сгорания винтовентилятора.
3. Скоростной вертолет с перекрещивающимися винтами по п. 1 или 2, отличающийся тем, что каждый несущий винт выполнен с уменьшением хорды на конце каждой его лопасти, имеющей упомянутую саблевидную форму в плане с заостренной по направлению к ее концу оживальной законцовки, имеющей на ее конце переднюю кромку с углом стреловидности, составляющим χ=44°, каждая лопасть в некоторой зоне на ее конце, располагающейся на участке между от 5/6 R до полного радиуса каждой лопасти R, т.е. размаха данной лопасти с учетом заостренной ее оживальной законцовки, имеет увеличенную степень некоторой линейной аэродинамической крутки с некоторой полной амплитудой, величина которой заключена в диапазоне от -7° до -12°, между центром каждого несущего винта и свободной оживальной законцовкой каждой лопасти, причем относительная толщина профиля каждой лопасти поддерживается на уровне от 14 до 12% на той части лопасти, где хорда имеет относительно небольшую длину, т.е. до элементарного поперечного сечения, располагающегося на уровне примерно от корневой ее части до 5/12 полного размаха каждой лопасти, имеющей на полном ее размахе профили между элементарным поперечным сечением, располагающимся в зоне на участке от 5/12 полного размаха каждой лопасти до конца каждой лопасти, относительная толщина которой уменьшается как бы линейным образом, образующим двукратное ее относительное утончение до уровня от 7 до 6%, в частности, на заостренном участке между началом и концом оживальной законцовки каждой лопасти, имеющей отклоненную ее законцовку вниз на угол β1=5,5°, образуя в радиальном направлении вдоль всей протяженности полного размаха лопасти как бы усеченную ее клиновидность при виде сбоку с горизонтально расположенной законцовкой, отогнутой вниз по линии отгиба от точки сопряжения задней кромки на участке ее изгиба в плане назад против ее вращения.
4. Скоростной вертолет с перекрещивающимися винтами по п. 3, отличающийся тем, что каждая упомянутая лопасть выполнена, например, из композиционных материалов, с одновременным формованием вдоль всей протяженности ее полного размаха R участков на ряд четных разновеликих зон как на ее верхней, так и нижней поверхностях, имеющих от ее начала соответственно как от первой все нечетные, так и от второй все четные зоны, выполненные с утолщениями до 0,5 мм, имеющими в соответствующей зоне как передние кромки, размещенные по середине от центра давления лопасти к ее передней кромке, так и удвоенную длину от ширины утолщений, равной b=5/9 аэродинамической хорде лопасти, но и соответствующие утонченности как к передней и задней его кромкам, выполненным соответственно дугообразной и пилообразной формы в плане в соответствующей зоне, так и от толщины 0,5 мм каждого утолщения к утонченностям каждой из трехгранных боковых его сторон, выполненных как бы по радиусам соответствующей зоны, каждая из которых, начиная от конца лопасти, ее четное нижнее утолщение с последующим нечетным верхним утолщением образуют как бы синусоидальную конфигурацию при виде сбоку вдоль полного ее размаха R, имеющей отклоненную ее законцовку вниз на угол 2β1.
| СКОРОСТНОЙ ВИНТОКРЫЛ | 2012 |
|
RU2507121C1 |
| Способ получения безводного хлористого алюминия | 1960 |
|
SU146301A1 |
| Устройстов для измерения изменений во времени давления жидкости или газа | 2018 |
|
RU2690010C1 |
| US 7530787 B2, 12.05.2009. | |||

