Изобретение относится к области машиностроения, в частности в приборостроении для преобразования вращательного движения в поступательное в различных технологических устройствах.
Известно устройство в виде передачи винт-гайка (Кожевников С.Н. и др. Механизмы. Справочное пособие. М.: Машиностроение, 1976, рис.2.251А), которое состоит из корпуса, с размещенными в нем с возможностью вращения и поступательного перемещения винтом, а также вращающейся гайкой, взаимодействующей с винтом. Шаги винта и гайки совпадают, а ось резьбы винта расположена эксцентрично к оси резьбы гайки. Такое выполнение устройства не может обеспечить точность преобразования вращательного движения в поступательное при изменении внешней нагрузки на винт.
Близким является эксцентричная винтовая передача (А.С. СССР № 1350420, F16H 25/22, 1987. Бюл. № 41), содержащая корпус, в котором размещена с возможностью фиксированного поворота втулка с выполненным в ней эксцентричным отверстием. Во втулке размещена с возможностью вращения гайка и размещенный в ней с возможностью осевого перемещения и взаимодействующий с гайкой винт. Ось винта параллельна и эксцентрична оси гайки. Шаги резьб винта и гайки совпадают. Профили резьб винта и гайки отличаются на некоторый угол. Такое выполнение передачи не может исключить относительное проскальзывание гайки относительно винта при возникновении нагрузок на последнюю, что приводит к снижению точности преобразования движения.
Задача изобретения - повышение точности преобразования вращательного движения в поступательное при изменении нагрузки в широком диапазоне.
Поставленная задача достигается тем, что винтовой преобразователь движений содержит корпус, в котором размещена гайка с возможностью осевого перемещения. Эксцентрично относительно оси гайки установлен винт, сопрягаемый с гайкой, установленный на полом валике. Другой конец винта выполнен в виде шестерни, взаимодействующей с неподвижным зубчатым венцом, установленным в корпусе. Делительный диаметр окружности шестерни соответствует среднему диаметру резьбы винта, а делительный диаметр окружности зубчатого венца соответствует среднему диаметру резьбы гайки. Полый валик жестко связан с эксцентриковыми опорной втулкой и приводной втулкой, установленными на опорах качения в подшипниковом кольце, сопрягаемом с корпусом. Эксцентриситет опорных втулок совпадает с эксцентриситетом осей винта и гайки.
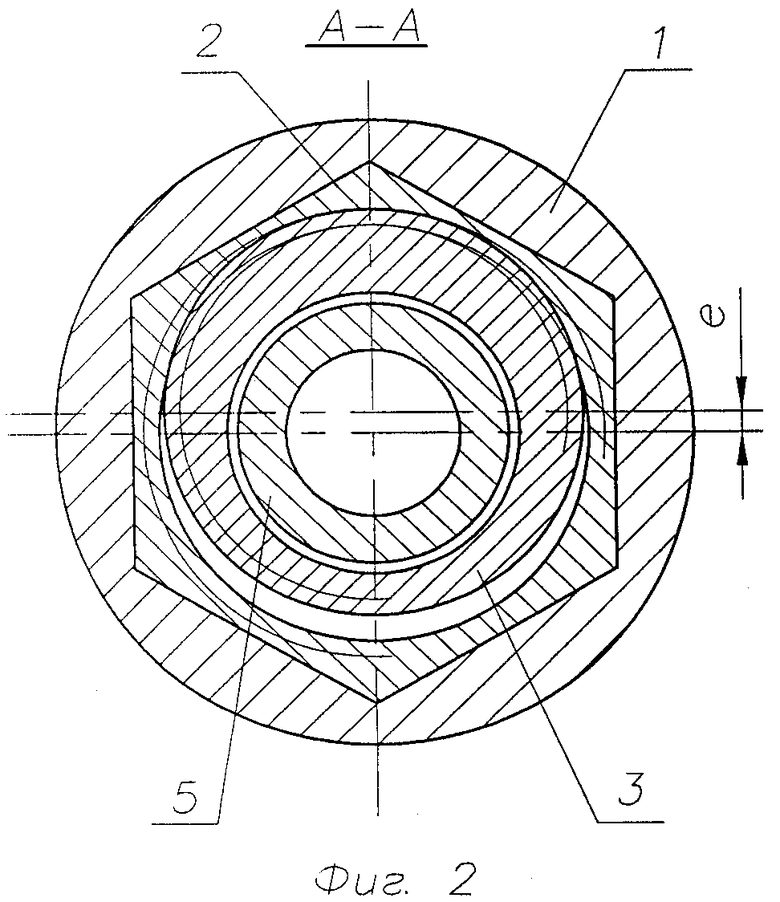
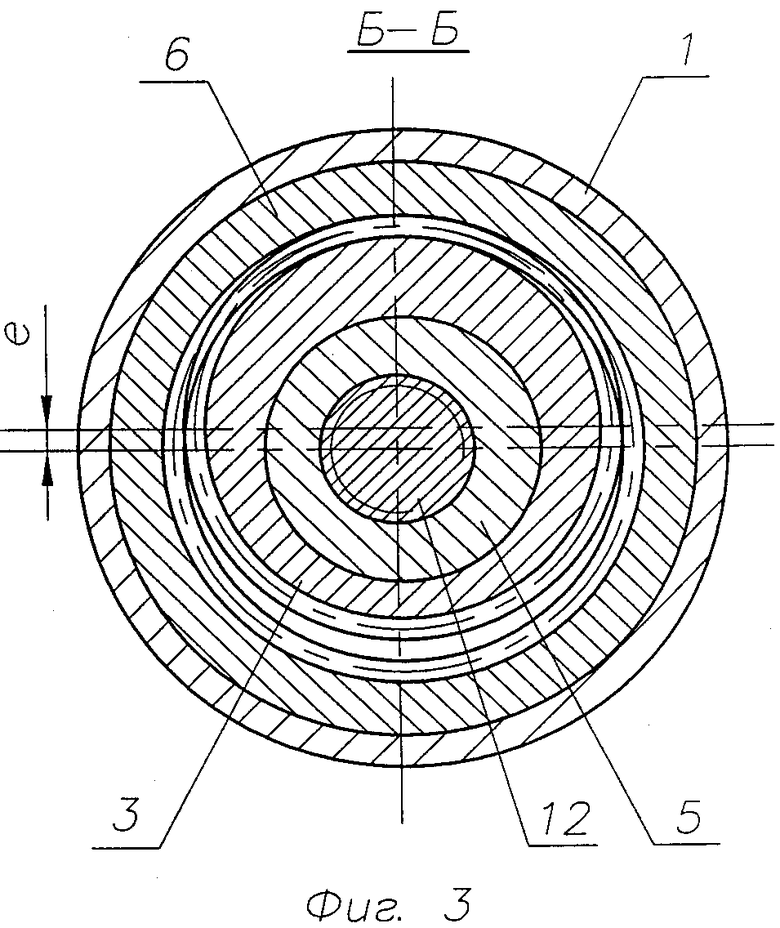
На фиг.1 изображен винтовой преобразователь движения, на фиг.2 - разрез А-А и фиг.3 - разрез Б-Б.
Винтовой преобразователь движений включает корпус 1, в направляющих которого помещена гайка 2, сопрягаемая с винтом 3. Ось резьбы винта 3 эксцентрична к оси резьбы гайки на величину е. Винт 3 размещен в опорах качения 4 на полом валике 5. Другой конец винта 3 выполнен в виде зубчатой шестерни, которая входит в зацепление с зубчатым венцом 6, неподвижно размещенным в корпусе 1. Болт 7 связывает приводную втулку 9 с винтом 3. Последние установлены на опорах качения 10 в подшипниковом кольце 11, размещенном в корпусе 1. Приводная 8 и опорная 9 втулки выполнены с таким же эксцентриситетом е, что эксцентриситет между осями винта и гайки. Винт 12 фиксирует болт 7.
Устройство работает следующим образом. Вращение передается от приводной втулки 8 и опорной втулки 9, установленных на опорах качения 10 в подшипниковом кольце 11, на винт 3. Зубчатый конец гайки 3 обкатывается по венцу 6, а резьбовая часть по гайке 2 (фиг.2 и фиг.3). Одновременно винт вращается вокруг собственной оси на опорах качения 4. При обкатывании винта 3 по резьбе гайки 2 происходит осевое смещение последней в направляющих корпуса 1. Причем, средний диаметр резьбы винта 3 соответствует делительной окружности шестерни, а средний диаметр гайки соответствует диаметру делительной окружности венца 6. Для обеспечения плавной работы устройства болт 7 обеспечивает необходимый натяг в опорах качения 4 и 10 и фиксируется винтом 12.
Использование зубчатого зацепления винта с неподвижным венцом и одновременно резьбового сопряжения позволяет исключить относительное проскальзывание профиля резьбы винта и гайки друг относительно друга при возникновении осевых нагрузок на винт. Это приводит к повышению точности преобразования движений устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРШНЕВАЯ МАШИНА | 2002 |
|
RU2224113C2 |
| ПРЕОБРАЗОВАТЕЛЬ КРУГОВОГО ДВИЖЕНИЯ В ЛИНЕЙНОЕ | 2007 |
|
RU2340818C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2002 |
|
RU2219398C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2002 |
|
RU2224935C2 |
| Винтовой механизм | 1990 |
|
SU1783203A1 |
| ВИНТОВАЯ ПЕРЕДАЧА | 1990 |
|
RU2012835C1 |
| Винтовой механизм | 1989 |
|
SU1744348A1 |
| ЭКСЦЕНТРИЧНАЯ ВИНТОВАЯ ПЕРЕДАЧА | 2009 |
|
RU2390674C1 |
| БЕСШАТУННЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 2007 |
|
RU2345259C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ | 2015 |
|
RU2610747C1 |
Изобретение относится к области машиностроения, в частности в приборостроении для преобразования вращательного движения в поступательное в различных технологических устройствах. Преобразователь содержит корпус, гайку, эксцентрично установленный и сопрягаемый винт с возможностью осевого перемещения. Один конец винта выполнен в виде шестерни, взаимодействующей с неподвижным зубчатым венцом, и установлен на полом валике, жестко связанном с эксцентриковыми опорной и приводной втулками, установленными на опорах качения в подшипниковом кольце. Эксцентриситет опорной и приводной втулок совпадает с эксцентриситетом между осями винта и гайки. Средние диаметры резьб винта и гайки соответствуют диаметрам делительных окружностей шестерни и зубчатого венца. Достигается повышение точности преобразования вращательного движения в поступательное. 3 ил.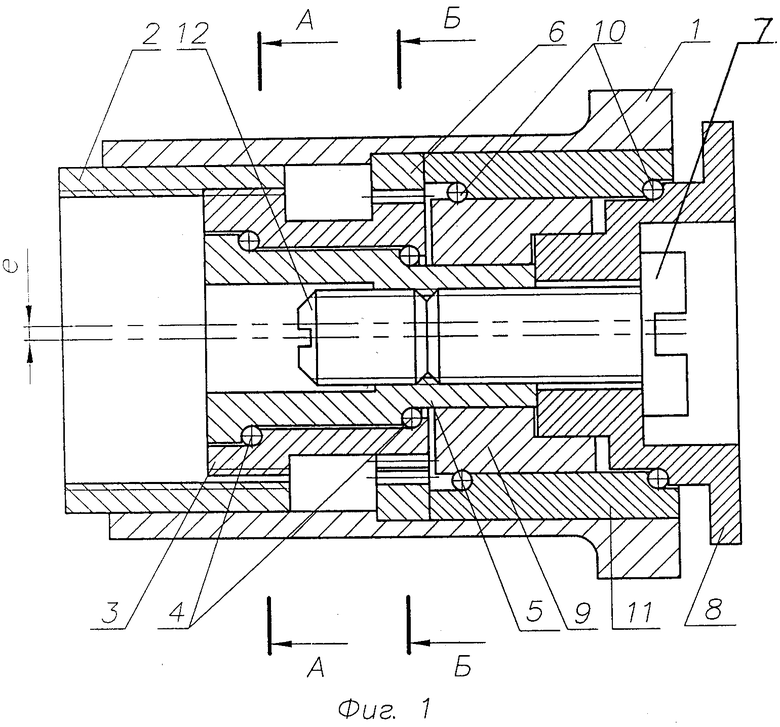
Винтовой преобразователь движений, содержащий корпус, гайку, эксцентрично установленный и сопрягаемый винт с возможностью осевого перемещения отличающийся тем, что другой конец винта выполнен в виде шестерни, взаимодействующей с неподвижным зубчатым венцом, и установлен на полом валике, жестко связанном с эксцентриковыми опорной и приводной втулками, установленными на опорах качения в подшипниковом кольце, причем эксцентриситет опорной и приводной втулок совпадает с эксцентриситетом между осями винта и гайки, а средние диаметры резьб винта и гайки соответствуют диаметрам делительных окружностей шестерни и зубчатого венца.
| Эксцентричная винтовая передача | 1986 |
|
SU1350420A1 |
| Винтовой механизм | 1990 |
|
SU1783203A1 |
| Устройство преобразования вращательного движения в поступательное | 1983 |
|
SU1128034A2 |
| US 5791433 A, 11.08.1998 | |||
| US 4723453 A, 09.02.1988. | |||

