Изобретение относится к винтовым механизмам преобразования вращательного движения в поступательное и может найти применение в приводах различных технологических машин.
Известны винтовые механизмы, содержащие корпус, размещенный в нем винт, взаимодействующую с винтом эксцентрично установленную гайку и привод.
Одним из аналогов таких винтовых ме- ханизмов является ролико-винтовой механизм, в котором резьбовые ролики размещены в сепараторах и находятся в сопряжении одновременно с резьбами винта и гайки, имея планетарное движение при вращении винта.
Недостатком аналога является расположение осей винта, гайки и роликов на неизменном расстоянии, что не позволяет плавно регулировать кинематическую пере- даточную функцию - перемещение гайки за один оборот винта. Кроме того, данный механизм не имеет возможности периодически выключаться с целью прерывистой работы,
Следовательно, аналог имеет узкие кинематические возможности.
Наиболее близким по технической сущности предлагаемому является принятый в качестве прототипа винтовой механизм, со- держащий корпус, размещенный в нем винт, взаимодействующую с винтом эксцентрично установленную с возможностью вра- щения гайки, установленную на подшипниках эксцентриковую втулку и при- вод
Недостатком прототипа является то, что оси винта и гайки расположены на неизменном расстоянии, что не позволяет регулировать скорость относительного перемещения винта и гайки,управлять условиями их зацепления. г
Следовательно, прототип Т)мееТ узкие кинематические возможности.
Цель изобретения - расширение кине- матических возможностей. -
Поставленная цель достигается тем, что на торце втулки выполнен зубчатый венец, а механизм снабжен дополнительной эксцентриковой втулкой, установленной на подшипниках в корпусе и имеющей на торце зубчатый венец и средством торможения, установленным с возможностью взаимодействия с торцами обеих втулок, а зубчатые венцы обеих втулок предназначе- ны для взаимодействия с приводом.
Винтовой механизм показан в общем виде на фиг. 1 в разрезе. На чертеже изображены винт 1, гайка 2, оси 3, 4, подшипники 5. эксцентриковая втулка б, привод 7, подшипники 8, цилиндрическое отверстие 9. корпус 10, дополнительная эксцентриковая втулка 11, средство торможения 12, шестерни 13, 14, 15, резьба 16, подшипники 17, болт 18, прихват 19, зубчатые венцы 20, 21, торцы 22, 23, муфта 24, шестерня 25, толщина стенки bi, b2, эксцентриситет е.
Указанные элементы взаимосвязаны следующим образом.
В корпусе 10 размещен винт 1, с которым взаимодействует охватывающая его гайка 2. Оси 3 и 4 винта 1 и гайки 2 размещены на величину эксцентриситета е. Винт
Iи гайка 2 содержат резьбу 16, Гайка 2 установлена в подшипниках 5, на которых установлена эксцентриковая втулка 6. На эксцентриковой втулке € расположены подшипники 17, на которых установлена дополнительная эксцентриковая втулка 11. Она одновременно расположена в подшипниках 8, установленных в цилиндрическом отверстии 9 корпуса 10 Эксцентриковая втулка 6 содержит на торце 22 зубчатый венец 20 и выполнена с переменной толщиной стенки bi. Дополнительная эксцентриковая втулка
IIимеет на торце 23 зубчатый венец 21 и переменную толщину стенки Ь2. Средство торможения 12, состоящее из болта 18 и прихвата 19, установлено с возможностью взаимодействия с торцами 22,23 обеих втулок 6, 11. Зубчатые венцы 20, 21 втулок 6, 11 предназначены для взаимодействия с приводом 7, включающим шестерни 13, 14, 15, 25 и муфту 24 путем зацепления соответственно с шестернями 15 и 13. Шестерни 13, 14, 15 являются неподвижными, а шестерня 25 - подвижной. Муфта 24 расположена на шестернях 13 и 25.
Винтовой механизм работает следующим образом,
В зависимости от взаимного поворота эксцентриковой втулки б и дополнительной эксцентриковой втулки 11 обусловлена величина эксцентриситета е, который таким образом может регулироваться. Поэтому сначала осуществляют настройку.задаиного эксцентриситета е поворотом вручную шестерни 13 и дополнительной эксцентриковой втулки 11. Затем при завинчивании болта 18 в торец 22 эксцентриковой втулки б прихват 19 прижимается к торцу 23 дополнительной эксцентриковой втулки 11. включается средство торможения 12, исключая взаимный поворот втулок б и 11. От привода 7 через шестерни 25, 14 и 15 движение передается на зубчатый венец 20 эксцентриковой втулки 6 и последняя вращается синхронно с дополнительной эксцентриковой втулкой 11. При этом гайка 2 обкатывается без скольжения по резьбе 16 относительно винта 1, создавая его осевое перемещение. Если выключить средство торможения 12, то вращение дополнительной эксцентриковой втулки приостанавливается, силы давления в резьбе 16 при вращении эксцентриковой втулки 6 смещают ее, уменьшая эксцентриситет е вплоть до выхода из зацепления винта 1 и гайки 2. Величину эксцентриситета е можно непрерывно изменять, установив разное передаточное отношение между шестернями 13,15 и зубчатыми венцами 20, 21, Тогда сместив шестерню 25 до включения муфты 24, получаем работу винта 1 и гайки 2 с переменным эксцентриситетом е. При этом можно при достижении эксцент- риситетом е заданного значения выключить муфту 24 и включить средство торможения 12, обеспечив работу с постоянным эксцентриситетом е. В случае равных передаточных отношений .между шестерней 13 с зубчатым венцом 21м шестерни 15 с зубчатым венцом 20 будем иметь после включения муфты 24 также работу с постоянным необходимым эксцентриситетом е.
Следовательно, винтовой механизм по- з-воляет р аботать как с постоянным, так и с переменным эксцентриситетом с ручной и механической его настройкой, изменять условия зацепления винта и гайки вплоть до выхода их из зацепления. Соответственно, обеспечивается регулировка скорости относительного перемещения винта и гайки, возможность их работы в плавном и прерывистом режиме.
Необходимость работы с различным эксцентриситетом между винтом и гайкой
может возникнуть также при ступенчатой форме винта с разным диаметром резьбы, при использовании гайки для приработки резьбы изготавливаемых винтов, когда требуется изменение точек контакта и давлений по резьбе, при требовании периодического включения - выключения винтового механизма, например, в целях предохранения его от перегрузки и поломки, при корректировке погрешностей зацепления.
Таким образом, винтовой механизм имеет широкие кинематические возможности.
Формула изобретения
Винтовой механизм, содержащий корпус, размещенный в нем винт, взаимодействующую с винтом эксцентрично установленную с возможностью вращения гайку, установленную на подшипниках эксцентриковую втулку и привод, отличающийся тем, что. с целью расширения кинематических возможностей, на торце втулки выполнен зубчатый венец, а механизм снабжен дополнительной эксцентриковой втулкой, установленной на подшипниках в корпусе и имеющей на торце зубчатый венец, и средством торможения, установленным с возможностью взаимодействия с торцами обеих втулок, а зубчатые венцы обеих втулок предназначены для взаимодействия с приводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОВОЙ ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЙ | 2007 |
|
RU2335677C1 |
| Устройство для привода скважинного штангового насоса | 1990 |
|
SU1809863A3 |
| Машина для правки проката | 1980 |
|
SU925473A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2221717C1 |
| Прокатно-ковочный стан | 1988 |
|
SU1547891A1 |
| Кривошипный пресс | 1969 |
|
SU307620A1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| Устройство орбитального перемещения при электроэрозионной обработке | 1982 |
|
SU1068246A1 |
| Устройство для холодного накатывания зубчатых профилей | 1984 |
|
SU1214298A1 |
| Устройство для регулирования закрытой высоты вертикального пресса и положения выталкивателей ползуна | 1987 |
|
SU1493493A1 |
Изобретение относится к винтовым механизмам преобразования вращательного движения в поступательное и может найти применение в приводах различных техноло25. 7 гических машин. Цель изобретения - расширение кинематических возможностей Положительный эффект достигается снабжением механизма дополнительной эксцентриковой втулкой 11 и средством торможения 12. Зубчатые венцы 20 и 21 соответственно втулок 6 и 11 предназначены для взаимодейст- вия с приводом 7. Средство торможения 12 предназначено для взаимодействия с торцами обеих втулок 6 и 11. От привода 7 через шестерни 25, 14 и 15 движение передается на зубчатый венец 20 эксцентриковой втулки 6, которая вращается синхронно с дополнительной эксцентриковой втулкой 11. При этом гайка 2 обкатывается без скольжения по резьбе 16 относительно винта 1, создавая его осевое перемещение. 1 ил со С х| 00 00 ю о IOJ | 7///////i /S//// 7l( // / S S /8 8,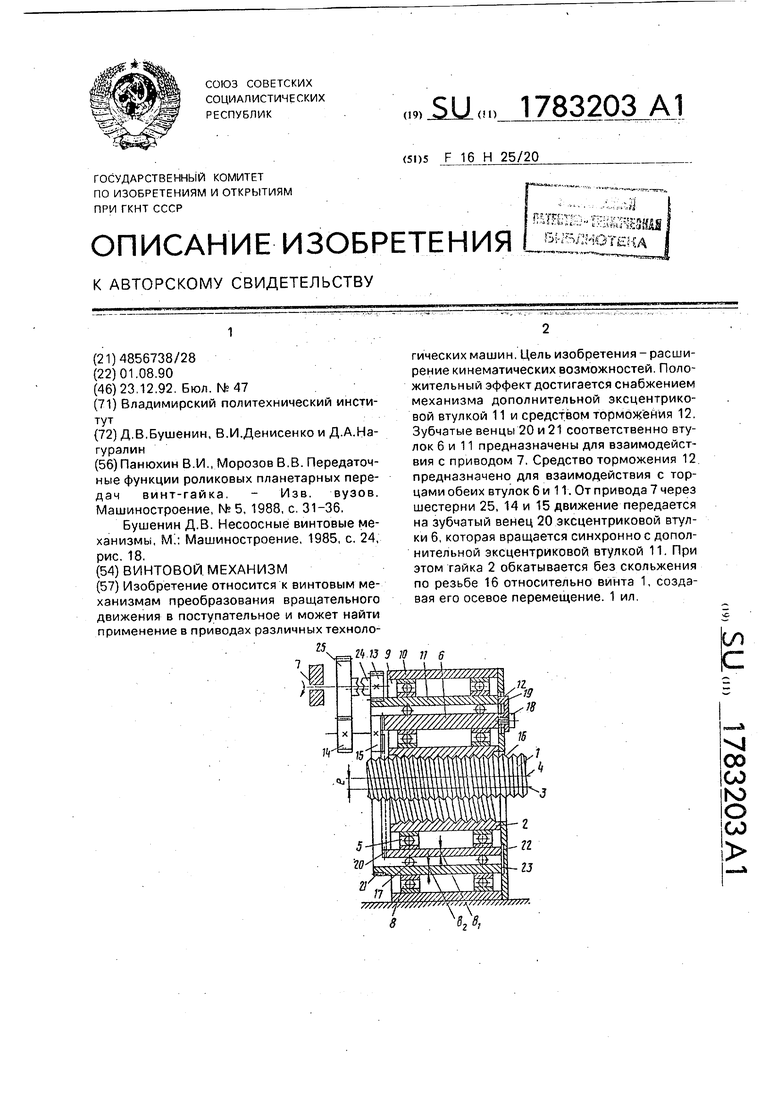
| Панюхин В.П., Морозов В.В | |||
| Передаточные функции роликовых планетарных передач винт-гайка - Изв | |||
| вузов | |||
| Машиностроение, № 5, 1988, с 31-36 | |||
| Бушенин Д.В | |||
| Несоосные винтовые механизмы, М.: Машиностроение, 1985, с, 24, рис | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
